 電子發燒友App
電子發燒友App


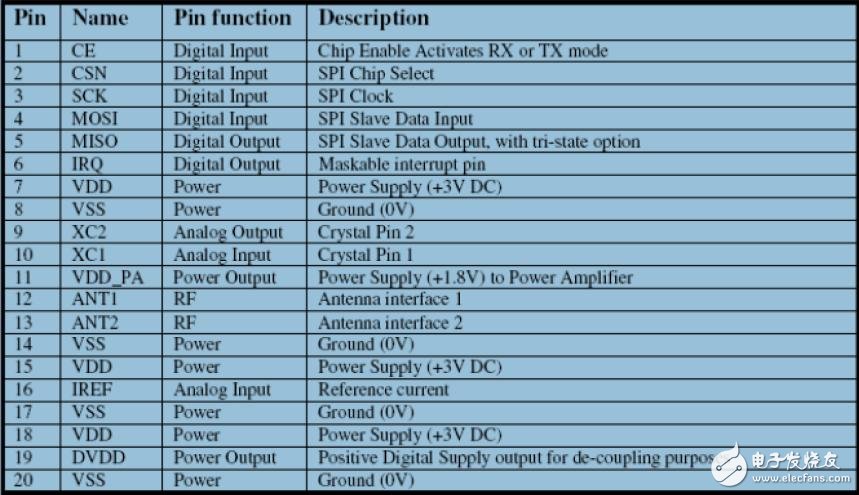
先簡單的介紹下nRF24L01無線模塊
(1) 2.4Ghz 全球開放ISM 頻段免許可證使用
(2) 最高工作速率2Mbps,高效GFSK調制,抗干擾能力強,特別適合工業控制場合
(3) 126 頻道,滿足多點通信和跳頻通信需要
(4) 內置硬件CRC 檢錯和點對多點通信地址控制
(5) 低功耗1.9 - 3.6V 工作,待機模式下狀態為22uA;掉電模式下為900nA
(6) 內置2.4Ghz 天線,體積小巧15mm X29mm
(7) 模塊可軟件設地址,只有收到本機地址時才會輸出數據(提供中斷指示),可直接接各種單片機使用,軟件編程非常方便

通過SPI方式完成數據的交換,包括數據的發送,數據的接收。說明一下,單片機中如果沒有SPI的硬件電路,我們可以使用單片機的普通IO口進行SPI的時序模擬,只要符合無線模塊的時序邏輯,一樣能控制無線模塊的通信。FPGA是可編程邏輯,最大的特點就是靈活,用戶可根據需求加入所需要的邏輯器件,當然它所包含的邏輯單元也是相當的豐富,有SPI硬件模塊。這樣用戶就省去了SPI方式的時序邏輯,可以更好的專注于功能的開發。
單片機:這里我們使用的單片機型號為PIC16F877。
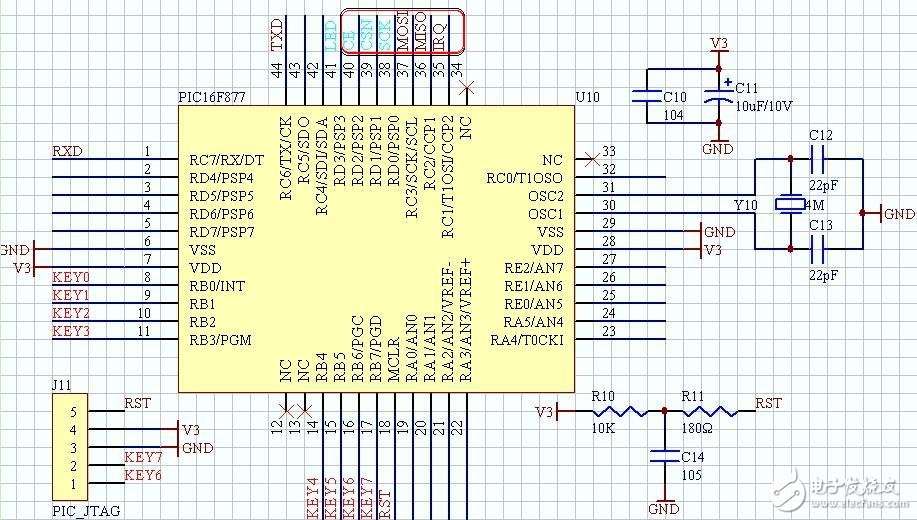
圖1.3 NRF24L01接入PIC的原理圖
說明:從圖1.3中可以看出,主要是圖1.1中的6個信號(還有2個是地與電源)接入單片機中。而那些引腳是普通的IO口,需要用戶模仿SPI時序進行控制。
無線模塊進行數據的交換就是數據的發送與數據的接收,下面將從這2個方面進行介紹。不管是數據的發送還是數據的接收,要想控制好NRF24L01無線模塊,先要通過SPI方式對無線模塊進行配置,只需要往它對應的寄存器里寫入數值便可。
先定義一下PIC上的宏,下面我們就可以很方便的對PIC的引腳進行操作。
1 #define MISO RC2
2 #define MOSI RC3
3 #define SCK RD0
4 #define CE RD2
5 #define CSN RD1
6 #define IRQ RC1
7 #define LED RD3
8 #define KEY0 RB0
9 #define KEY1 RB1
10 #define KEY2 RB2
11 #define KEY3 RB3
12 #define KEY4 RB4
13 #define KEY5 RB5
14 #define KEY6 RB6
15 #define KEY7 RB7
NRF24L01無線模塊的寄存器
1 //*******************NRF24L01寄存器指令
2 #define READ_REG 0x00 // 讀寄存器指令
3 #define WRITE_REG 0x20 // 寫寄存器指令
4 #define RD_RX_PLOAD 0x61 // 讀取接收數據指令
5 #define WR_TX_PLOAD 0xA0 // 寫待發數據指令
6 //*******************SPI(nRF24L01)寄存器地址
7 #define CONFIG 0x00 // 配置收發狀態,
8 #define EN_AA 0x01 // 自動應答功能設置
9 #define EN_RXADDR 0x02 // 可用信道設置
10 #define SETUP_AW 0x03 // 收發地址寬度設置
11 #define SETUP_RETR 0x04 // 自動重發功能設置
12 #define RF_CH 0x05 // 工作頻率設置
13 #define RF_SETUP 0x06 // 發射速率、功耗功能設置
14 #define STATUS 0x07 // 狀態寄存器
15 #define RX_ADDR_P0 0x0A // 頻道0接收數據地址
16 #define TX_ADDR 0x10 // 發送地址寄存器
17 #define RX_PW_P0 0x11 // 接收頻道0接收數據長度
18 #define FIFO_STATUS 0x17 // FIFO棧入棧出狀態寄存器設置
有2類寄存器是用戶可以根據自己的需求所確定的,那就是地址的長度以及內容、發送與接收數據的長度,但無線模塊一次最多可以發送32個字節,這兩類寄存器一般設置為3~4個字節。
1 #define TX_PLOAD_WIDTH 4
2 #define RX_PLOAD_WIDTH 4
3 unsigned char TX_ADDRESS[TX_ADR_WIDTH]= {0x34,0x43,0x10}; //本地地址
4 unsigned char RX_ADDRESS[RX_ADR_WIDTH]= {0x34,0x43,0x10}; //接收地址
A 模擬SPI方式
1 /****************************************************************************************************
2 /*函數:uint SPI_RW(uint uchar)
3 /*功能:NRF24L01的SPI時序
4 /****************************************************************************************************/
5 unsigned char SPI_RW(unsigned char a)
6 {
7 unsigned char i;
8 for(i=0;i《8;i++)
9 {
10 if((a&0x80)==0x80)
11 MOSI=1;
12 else MOSI=0; // output ‘uchar’, MSB to MOSI
13 a=(a《《1); // shift next bit into MSB.。
14 SCK=1; // Set SCK high.。
15 if(MISO==1)
16 a|=0x01;
17 else a&=0xfe; // capture current MISO bit
18 SCK=0; // 。.then set SCK low again
19 }
20 return(a); // return read uchar
21 }
B 以SPI方式對寄存器的操作
1 /****************************************************************************************************
2 /*函數:uchar SPI_Read(uchar reg)
3 /*功能:NRF24L01的SPI讀操作
4 /****************************************************************************************************/
5 unsigned char SPI_Read(unsigned char reg)
6 {
7 unsigned char reg_val;
8 CSN=0; // CSN low, initialize SPI communication.。.
9 SPI_RW(reg); // Select register to read from.。
10 reg_val=SPI_RW(0); // 。.then read registervalue
11 CSN=1; // CSN high, terminate SPI communication
12 return(reg_val); // return register value
13 }
14 /****************************************************************************************************/
15 /*功能:NRF24L01讀寫寄存器函數
16 /****************************************************************************************************/
17 unsigned char SPI_RW_Reg(unsigned char reg, unsigned char value)
18 {
19 unsigned char status;
20 CSN = 0; // CSN low, init SPI transaction
21 status=SPI_RW(reg); // select register
22 SPI_RW(value); // 。.and write value to it.。
23 CSN = 1; // CSN high again
24 return(status); // return nRF24L01 status uchar
25 }
26 /****************************************************************************************************/
27 /*函數:uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars)
28 /*功能: 用于讀數據,reg:為寄存器地址,pBuf:為待讀出數據地址,uchars:讀出數據的個數
29 /****************************************************************************************************/
30 unsigned char SPI_Read_Buf(unsigned char reg, unsigned char *pBuf, unsigned char uchars)
31 {
32 unsigned char status,uchar_ctr;
33 CSN = 0; // Set CSN low, init SPI tranaction
34 status=SPI_RW(reg); // Select register to write to and read status uchar
35
36 for(uchar_ctr=0;uchar_ctr
37 {
38 pBuf[uchar_ctr]=SPI_RW(0);
39 }
40 CSN = 1;
41
42 re
責任編輯;zl












 工商網監
工商網監
評論