DSP與FPGA設(shè)計(jì)的跟蹤伺服運(yùn)動(dòng)控制技術(shù)
摘 要: 在分析光電跟蹤伺服系統(tǒng)特點(diǎn)的基礎(chǔ)上,以TI公司DSP芯片TMS320F2812作為主控制芯片,采用FPGA進(jìn)行邏
2010-05-15 18:22:52 1418
1418 
CAN 總線(Controller Area Network)是控制器局域網(wǎng)的簡稱,是 20 世紀(jì) 80 年代初德國 BOSCH 公司為解決現(xiàn)代汽車中眾多的控制與測試儀器之間的數(shù)據(jù)交換而開發(fā)的一種
2022-07-28 08:52:331678 CAN 總線(Controller Area Network)是控制器局域網(wǎng)的簡稱,是 20 世紀(jì) 80 年代初德國 BOSCH 公司為解決現(xiàn)代汽車中眾多的控制與測試儀器之間的數(shù)據(jù)交換而開發(fā)的一種
2022-11-14 11:15:441121 CAN總線控制器MCP2515的原理及應(yīng)用
2013-09-14 21:12:14
CAN總線控制器Verilog代碼
2012-08-10 18:49:46
摘要:討論了CAN總線控制器與DSP之間的接口,介紹了流行的CAN控制器芯片SJA1000和TMS320系列DSP芯片的接口時(shí)序,并給出了它們的接口方法和電路。關(guān)鍵詞:CAN控制器 DSP 時(shí)序
2018-12-03 15:22:37
CAN總線系統(tǒng)中控制器和收發(fā)器是需要自己設(shè)計(jì)嗎?還是節(jié)點(diǎn)的模塊內(nèi)部自帶了?
2016-09-06 11:12:18
TMCM1636伺服驅(qū)動(dòng)控制器有何功能?TMCM1636伺服驅(qū)動(dòng)控制器有哪些應(yīng)用?
2021-10-08 08:32:46
。項(xiàng)目描述:控制器實(shí)現(xiàn)CAN、RS484、RS422等多種總線接口控制,初步方案通過PCA82C250實(shí)現(xiàn)CAN總線接口,并通過光耦進(jìn)行電源隔離。
2016-01-29 11:52:12
BSJA1000 電路是一款獨(dú)立CAN 總線控制器,主要應(yīng)用于汽車和一般工業(yè)環(huán)境領(lǐng)域。該產(chǎn)品與CAN 2.0B 通信協(xié)議完全兼容,具有很多先進(jìn)特性,特別適用于系統(tǒng)級(jí)優(yōu)化、診斷和維護(hù)等重要應(yīng)用領(lǐng)域
2012-12-21 15:57:48
所要求的全部必要功能,因此,CAN控制器與其它微處理器的接口設(shè)計(jì)成為設(shè)計(jì)CAN總線系統(tǒng)的首要工作。本文重點(diǎn)介紹以SHARC DSP為核心的、基于SJA1000的CAN總線接口設(shè)計(jì)。SJA1000簡介
2019-06-06 05:00:37
廣泛應(yīng)用于數(shù)字化控制與通信領(lǐng)域。CAN總線控制器與TMS320LF2407微控制器連接,可以實(shí)現(xiàn)CAN總線的通信。TMS320LF2407微控制器內(nèi)嵌的異步串行口(SCI)支持CPU與其它使用標(biāo)準(zhǔn)格式
2018-12-10 10:19:26
基于DSP與FPGA的運(yùn)動(dòng)控制器設(shè)計(jì)設(shè)計(jì)了一種基于DSP和FPGA的四軸伺服電機(jī)運(yùn)動(dòng)控制器,該控制器選用DSP與FPGA作為核心部件。針對(duì)運(yùn)動(dòng)控制中的一些具體問題,如高速、高精度、實(shí)時(shí)控制等,規(guī)劃
2009-09-19 09:43:00
本帖最后由 mr.pengyongche 于 2013-4-30 02:58 編輯
基于DSP的直流伺服電機(jī)控制器設(shè)計(jì)與實(shí)
2012-08-17 14:07:22
基于DSP的高低速CAN總線汽車控制系統(tǒng)設(shè)計(jì)摘 要 采用TI公司內(nèi)嵌CAN 2.0B模塊的數(shù)字信號(hào)處理器TMS320LF2407A作為汽車計(jì)算機(jī)控制系統(tǒng)中的主控制器并兼作網(wǎng)關(guān),構(gòu)建高低速CAN總線
2009-10-06 14:57:04
目前伺服控制器的設(shè)計(jì)多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環(huán)境比較惡劣的條件如高溫高壓下DSP的應(yīng)用效果會(huì)大打折扣,因此以FPGA為控制核心,對(duì)應(yīng)用于機(jī)載三軸伺服控制平臺(tái)的控制器進(jìn)行了設(shè)計(jì)與優(yōu)化。
2019-07-16 07:41:04
目前伺服控制器的設(shè)計(jì)多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環(huán)境比較惡劣的條件如高溫高壓下DSP的應(yīng)用效果會(huì)大打折扣,因此以FPGA為控制核心,對(duì)應(yīng)用于機(jī)載三軸伺服控制平臺(tái)的控制器進(jìn)行了設(shè)計(jì)與優(yōu)化。
2019-07-08 06:28:36
說明:這是我的畢業(yè)設(shè)計(jì),基于STM32的CAN總線通信節(jié)點(diǎn)設(shè)計(jì)。用的是STM32F103微控制器,LCD1602液晶顯示,MQ-4甲烷氣體傳感器,CTM1050CAN收發(fā)器。但是甲烷傳感器限于條件
2021-07-19 07:18:56
的邏輯處理和控制算法,能實(shí)現(xiàn)多軸高速高精度的伺服控制。利用DSP與FPGA設(shè)計(jì)運(yùn)動(dòng)控制器,其中DSP用于運(yùn)動(dòng)軌跡規(guī)劃、速度控制及位置控制等功能;FPGA完成運(yùn)動(dòng)控制器的精插補(bǔ)功能,用于精確計(jì)算步進(jìn)電機(jī)或伺服驅(qū)動(dòng)元件的控制脈沖,同時(shí)接收并處理脈沖型位置反饋信號(hào)。那么,我們具體該怎么做呢?
2019-08-06 06:27:00
CAN控制器怎樣檢測到CAN總線上的波特率?在不知道CAN總線波特率的情況下。
2020-04-22 01:12:44
控制局域網(wǎng)(CAN)屬于現(xiàn)場總線的范疇,它是一種有效支持分布式控制或?qū)崟r(shí)控制的串行通信網(wǎng)絡(luò)。與一般的通信總線相比,CAN總線的數(shù)據(jù)通信可靠性、實(shí)時(shí)性和靈活性好,應(yīng)用領(lǐng)域非常廣泛,通常基于ARM或51單片機(jī),實(shí)現(xiàn)與CAN控制器的通信聯(lián)絡(luò)。
2019-10-18 07:30:54
機(jī)構(gòu),通過導(dǎo)彈電液伺服機(jī)構(gòu)的作動(dòng)筒的動(dòng)作來控制導(dǎo)彈的飛行彈道。1.1 CAN總線CAN(Controller Area Network)即控制器局域網(wǎng)絡(luò)。CAN總線是一種多主站局部網(wǎng)絡(luò),能夠有效支持
2019-06-11 05:00:04
CAN總線及控制器工作原理是什么?流接口驅(qū)動(dòng)程序工作機(jī)制是怎樣的?怎樣去設(shè)計(jì)CAN總線控制器sJAl000驅(qū)動(dòng)程序?
2021-04-27 06:41:09
怎樣去設(shè)計(jì)三軸伺服控制器?如何對(duì)三軸伺服控制器的性能進(jìn)行測試?
2021-04-28 06:04:11
針對(duì)系統(tǒng)通信可靠、實(shí)時(shí)性的要求,在交直流埋弧焊接通信控制中,提出了一種基于DSP的CAN總線通信控制方案,介紹了交直流埋弧焊電源系統(tǒng)結(jié)構(gòu)原理的設(shè)計(jì),并對(duì)基于DSP的CAN總線通信的協(xié)議設(shè)計(jì)、硬件電路設(shè)計(jì)以及軟件設(shè)計(jì)進(jìn)行了較詳細(xì)說明,同時(shí)還提出了一種多幀數(shù)據(jù)準(zhǔn)確通信的方案。
2021-05-28 06:31:48
分享一篇太陽能是如何自動(dòng)跟蹤控制器的文章
2021-04-20 06:49:08
控制與通信領(lǐng)域。CAN總線控制器與TMS320LF2407微控制器連接,可以實(shí)現(xiàn)CAN總線的通信。TMS320LF2407微控制器內(nèi)嵌的異步串行口(SCI)支持CPU與其它使用標(biāo)準(zhǔn)格式的異步外設(shè)之間
2019-06-14 05:00:10
CAN總線控制器Verilog代碼
2008-05-20 10:32:12 167
167 根據(jù)控制局域網(wǎng)絡(luò)(CAN)的特點(diǎn)及應(yīng)用要求,提出一種新的動(dòng)態(tài)調(diào)度協(xié)議(DSP),通過動(dòng)態(tài)選擇時(shí)間間隙調(diào)度信息,同時(shí)考慮實(shí)時(shí)數(shù)據(jù)的重傳機(jī)制,并在此基礎(chǔ)上介紹基于CAN 總線的實(shí)
2009-03-30 10:24:5026 討論一種基于DSP內(nèi)嵌CAN控制器的CAN 總線通信方式;介紹TI公司新推出的DSP芯片TMS320F2812內(nèi)嵌的CAN 控制器eCAN(增強(qiáng)型控制器局域網(wǎng))模塊的特點(diǎn); 通過與TI 公司先前推出的DSP 內(nèi)嵌的CA
2009-04-15 11:53:02121 研究一種基于DSP 與CAN 總線的測速和遠(yuǎn)程傳送一體化技術(shù)。根據(jù)TMS320LF2407 芯片內(nèi)帶有捕獲單元的事件管理器和CAN 控制器模塊的特點(diǎn),探討配置方法、給出設(shè)計(jì)實(shí)例,簡潔實(shí)現(xiàn)測速和
2009-05-18 14:24:3817 根據(jù)印刷機(jī)械的工藝特點(diǎn),針對(duì)傳統(tǒng)以機(jī)械長軸為動(dòng)力源的印刷機(jī)同步系統(tǒng),設(shè)計(jì)了基于CAN現(xiàn)場總線的多伺服電機(jī)同步控制系統(tǒng)方案,提出了上位機(jī)同步運(yùn)動(dòng)數(shù)據(jù)的產(chǎn)生機(jī)制,和上
2009-06-01 15:40:0939 本文針對(duì)賓館、酒店的客房控制和管理系統(tǒng),介紹了基于CAN 總線的客房通信控制器的硬件電路結(jié)構(gòu)、原理及軟件結(jié)構(gòu)和主程序流程。關(guān)鍵詞:CAN 總線;現(xiàn)場總線;通信技術(shù);樓
2009-06-13 12:06:0313 陀螺是一種應(yīng)用廣泛的慣性器件,而陀螺動(dòng)態(tài)測試系統(tǒng)是重要的研究課題,首先提出了采用CAN總線作為數(shù)據(jù)通訊方式,DSP作為各智能節(jié)點(diǎn)的主控制器來構(gòu)建陀螺動(dòng)態(tài)測試系統(tǒng),然后
2009-07-10 16:12:2913 介紹一種以8051微控制器和82527獨(dú)立CAN總線控制器為核心組成的CAN總線智能傳感器節(jié)點(diǎn)的設(shè)計(jì)方法,并給出其硬件原理圖和初始化程序。
2009-07-17 08:41:1625 針對(duì)煤礦綜采工作面電液控制系統(tǒng)中液壓支架多而分散、系統(tǒng)信息量大、調(diào)試不方便等特點(diǎn),介紹了一種基于CAN 總線的液壓支架控制器的設(shè)計(jì)方案。通過CAN 總線,服務(wù)器和液
2009-08-05 09:31:3317 隨著計(jì)算機(jī)網(wǎng)絡(luò)技術(shù)和現(xiàn)場總線技術(shù)的發(fā)展,工業(yè)自動(dòng)化系統(tǒng)將逐步被現(xiàn)場總線控制系統(tǒng)FCS (Field-bus Control System)所取代。本文給出了一種基于CAN 現(xiàn)場總線技術(shù)、以DSP TMS320LF2407A
2009-08-21 09:12:1874 針對(duì)CAN 總線技術(shù)應(yīng)用的蓬勃發(fā)展,本文設(shè)計(jì)了一種基于CAN 總線的工程設(shè)備控制系統(tǒng),對(duì)總線通訊協(xié)議進(jìn)行了設(shè)計(jì)研究,介紹了基于CAN 總線技術(shù)的作業(yè)控制終端、作業(yè)控制器、虛擬
2009-09-03 10:14:0216 本文設(shè)計(jì)了一種基于CAN 總線的電梯呼梯控制器, 它是電梯的一個(gè)重要組成部分。該控制器用于給出每一樓層的呼叫請(qǐng)求信息,并顯示電梯當(dāng)前運(yùn)行情況。本系統(tǒng)采用目前比較流行
2009-09-17 10:13:3738 CAN控制器模塊世界向著網(wǎng)絡(luò)化方向發(fā)展,測控系統(tǒng)也不例外。CAN總線的出現(xiàn),使控制系統(tǒng)的網(wǎng)絡(luò)化成為可能,是國際公認(rèn)的一種現(xiàn)場總線協(xié)議。CAN (Controller Area Network)總
2009-09-21 08:39:1512 本文介紹了基于TMS320F2812 三軸跟蹤轉(zhuǎn)臺(tái)伺服控制系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)。采用“交流伺服電機(jī)+減速器”代替轉(zhuǎn)臺(tái)傳統(tǒng)的直流力矩電機(jī)直接驅(qū)動(dòng)負(fù)載的方式;運(yùn)用DSP 和CAN 總線技術(shù);利用
2009-09-26 08:18:0616 介紹了CAN 總線在航天領(lǐng)域的應(yīng)用狀況,在對(duì)CAN 總線技術(shù)和DSP 芯片功能研究的基礎(chǔ)上,設(shè)計(jì)了基于CAN 總線和DSP 的雙層數(shù)據(jù)采集系統(tǒng),本數(shù)據(jù)采集系統(tǒng)對(duì)于CAN 總線技術(shù)在航天領(lǐng)域
2009-09-26 09:11:3923 GY8608 CAN 總線接口的雙路步進(jìn)電機(jī)控制器:1、CAN 總線接口,可通過同時(shí)控制2 路步進(jìn)電機(jī)。2、如果只控制一路步進(jìn)電機(jī),最大工作頻率25khz。3、如果同時(shí)控制兩路步進(jìn)電機(jī),則
2010-01-14 18:40:1434 SHARC DSP與SJA1000的CAN總線接口設(shè)計(jì)
本文討論了DSP與CAN控制器SJA1000的總線接口的差別,提出了SJA1000和SHARC系列DSP接口設(shè)計(jì)的簡單方法和通用方法。測試
2009-09-27 16:10:551310 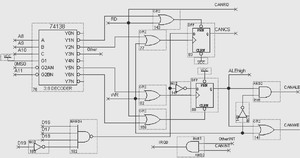
基于DSP的CAN總線接口設(shè)計(jì)
1. CAN總線簡介
控制器局部網(wǎng)絡(luò)(CAN ControllerAreaNetwork)是德國Bosch公司從20世紀(jì)80年代初為解決現(xiàn)代汽車中眾多
2009-10-04 09:41:574265 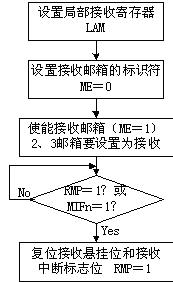
基于CAN總線的家庭控制器的設(shè)計(jì)與實(shí)現(xiàn)
引言
CAN(Controller Area Network)總線是德國Bosch公司為解決現(xiàn)代汽車中眾多的控制與測試儀器之間的數(shù)據(jù)交換而開發(fā)
2009-11-07 09:30:32662 
基于CAN總線和DSP的雙層數(shù)據(jù)采集系統(tǒng)的設(shè)計(jì)
1 引言
CAN(Controller Area Network)即控制器區(qū)域網(wǎng),CAN總線是由德國BOSCH公司為實(shí)現(xiàn)汽車測量和
2009-11-25 11:00:37776 基于DSP的電動(dòng)汽車CAN總線通訊技術(shù)設(shè)計(jì)
德國Bosch公司為了解決現(xiàn)代車輛中眾多的控制和數(shù)據(jù)交換問題,開發(fā)出一種CAN(Controller AreaNetwork) 現(xiàn)場總線通訊結(jié)構(gòu). CAN
2009-12-23 10:51:43833 
基于DSP的運(yùn)動(dòng)控制器的開發(fā)
運(yùn)動(dòng)控制器是一種用于多種運(yùn)動(dòng)控制場合的上位控制單元,通常采用專業(yè)運(yùn)動(dòng)控制芯片或高速DSP來控制步進(jìn)電機(jī)或伺服電機(jī)。運(yùn)動(dòng)控制器
2009-12-25 09:44:071964 
基于CAN總線的懸浮控制器監(jiān)控終端的設(shè)計(jì)
CAN總線是德國Bosch公司為解決現(xiàn)代汽車中多傳感器和控制器之間的數(shù)據(jù)交換而開發(fā)的一種串行總線。由于它通信速率高、通信
2010-01-25 16:25:04608 
基于DSP的PCI總線CAN適配器設(shè)計(jì)
1 引 言
CAN總線是一種開放式、數(shù)字化、多點(diǎn)通信的串行總線,是一種具有較高性價(jià)比、能滿足分布式控制要求的現(xiàn)場總線,
2010-03-05 11:21:331558 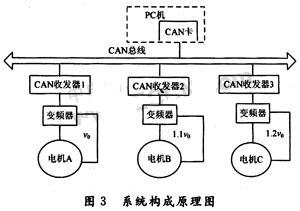
DSP的CAN總線系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
摘要:介紹了基于DSP的CAN控制器的設(shè)計(jì)及應(yīng)用方法,利用該方法可以在波特率高達(dá)lMb/s的條件下穩(wěn)定、可靠地傳輸數(shù)據(jù),而且延遲時(shí)間很少
2010-04-03 11:20:324259 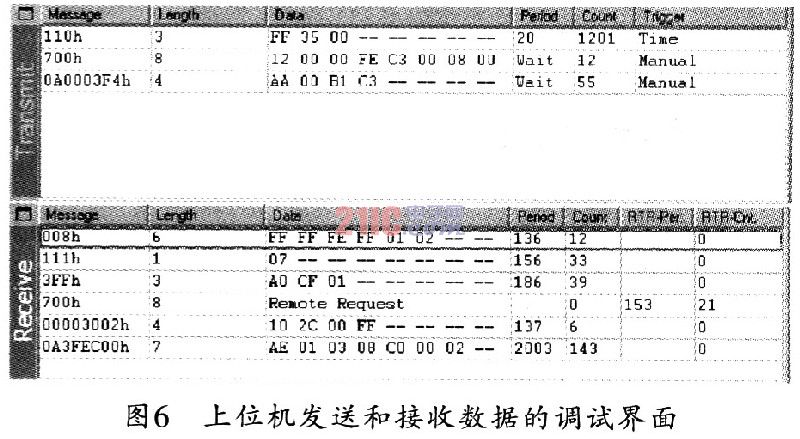
Elmo公司的Whistle系列數(shù)字伺服控制器,體積小、重量輕、提供數(shù)字輸入與輸出接口,提供RS232與CAN總線2種通信方式,
2010-12-24 10:14:541165 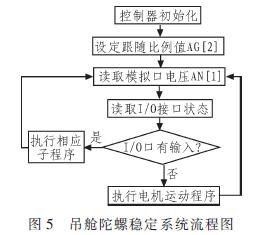
本文討論這些微處理器與CAN控制器的接口問題,重點(diǎn)介紹CAN控制器與TMS320系列DSP的接口方法和接口電路。
2011-06-22 17:16:131059 本內(nèi)容寫出了CAN總線控制器IP核的代碼,并做出了詳細(xì)分析
2011-06-28 11:39:426113 本文首先介紹PCI總線控制器PCI9052與CAN總線通信控制器SJA1000的工作原理,并且介紹了PCI總線和CAN總線通信控制器接口的硬件和軟件實(shí)現(xiàn)方法。
2011-09-23 17:34:221938 
通過對(duì)DSP芯片(TMS320VC33)、PCI9052接口芯片和伺服控制卡的功能和結(jié)構(gòu)特點(diǎn)進(jìn)行深入分析,設(shè)計(jì)了一種基于PCI總線的DSP伺服控制卡。實(shí)踐證明,本文所設(shè)計(jì)的伺服控制卡能夠滿足目前控制系
2011-09-27 17:21:2139 在此利用Verilog HDL設(shè)計(jì)了一款CAN總線控制器,首先根據(jù)協(xié)議把整個(gè)CAN總線控制器劃分為接口邏輯管理、寄存器邏輯和CAN核心模塊3個(gè)模塊,然后用Verilog HDL硬件描述語言設(shè)計(jì)了各個(gè)功能模塊
2012-07-31 14:25:247806 
運(yùn)用低功耗C0rtex-M3微控制器STM32F103VBT6和FPGA芯片設(shè)計(jì)一種基于CAN總線的運(yùn)動(dòng)控制器。介紹系統(tǒng)的體系結(jié)構(gòu)、主要硬件設(shè)計(jì)和軟件結(jié)構(gòu)。利用FPGA高速處理能力實(shí)現(xiàn)控制算法,與外界通信采
2013-01-31 14:33:3945 基于CAN總線伺服系統(tǒng)的多電機(jī)同步控制算法的研究,有興趣的同學(xué)可以下載學(xué)習(xí)
2016-04-26 17:53:460 DSP+TMS320LF2407與CAN控制器的接口應(yīng)用
2016-05-06 15:32:575 Xilinx FPGA工程例子源碼:FPGA實(shí)現(xiàn)CAN總線控制器源碼
2016-06-07 14:13:4387 接口控制新型的CAN 控制器MCP2515,使慣導(dǎo)系統(tǒng)不僅具備了接入CAN 總線的能力,而且在系統(tǒng)實(shí)現(xiàn)之后,節(jié)點(diǎn)可以根據(jù)現(xiàn)場應(yīng)用提出的新要求進(jìn)行升級(jí),增加了使用的靈活性。目前實(shí)驗(yàn)樣機(jī)已經(jīng)設(shè)計(jì)完成,可以正確地通過CAN 總線進(jìn)行通訊,達(dá)到了設(shè)計(jì)的要求。
2016-07-13 17:43:300 控制器局域網(wǎng)CAN總線技術(shù)規(guī)范
2017-01-24 16:54:2412 控制器局域網(wǎng)CAN總線技術(shù)規(guī)范
2017-02-07 18:09:2018 光電跟蹤架功能的不斷增加和檢測精度的不斷提高,因此這里從實(shí)用出發(fā),設(shè)計(jì)了基于TMs320LF2407 DsP的伺服控制器;由于TMs320LF2407的特點(diǎn),該控制器與Pcl04系統(tǒng)相比減小了體積,增加了可靠性,提高了運(yùn)算速度和能力,并且該控制器應(yīng)用在所內(nèi)某
2017-09-01 11:13:259 基于雙CAN總線的數(shù)字伺服通信協(xié)議
2017-09-01 14:25:428 基于DSP_CPLD的四電動(dòng)舵機(jī)伺服控制器設(shè)計(jì)
2017-10-20 08:24:044 基于DSP_FPGA與CAN總線的跟蹤控制器設(shè)計(jì)
2017-10-21 08:52:075 所要求的全部必要功能,因此,CAN控制器與其它微處理器的接口設(shè)計(jì)成為設(shè)計(jì)CAN總線系統(tǒng)的首要工作。本文重點(diǎn)介紹以SHARC DSP為核心的、基于SJA1000的CAN總線接口設(shè)計(jì)。 SJA1000簡介 SJA1000是一種獨(dú)立的CAN控制器,用于移動(dòng)目標(biāo)和一般工業(yè)環(huán)境中的控制器局域網(wǎng)
2017-10-23 15:48:0712 字電機(jī)伺服驅(qū)動(dòng)系統(tǒng),使用CANopen通訊協(xié)議實(shí)現(xiàn)了CAN總線數(shù)字信號(hào)處理器(DSP)系統(tǒng)與上位機(jī)CAN卡之間的通訊,并通過測試實(shí)驗(yàn)驗(yàn)證了信息傳遞的可靠性,保證了全數(shù)字網(wǎng)絡(luò)化伺服驅(qū)動(dòng)系統(tǒng)中對(duì)電機(jī)控制的快速性、準(zhǔn)確性和實(shí)時(shí)性。 2 通訊系統(tǒng)實(shí)現(xiàn)的基本原理 2.1 LF240x系
2017-10-31 11:00:5816 在大型光電跟蹤設(shè)備中由于跟蹤算法復(fù)雜,分系統(tǒng)眾多,要求伺服控制模塊不僅精度高、速度快、可靠性強(qiáng),而且要有豐富的外圍總線接口。考慮可靠性,選用PCI04PLUS總線及CAN總線作為系統(tǒng)外部總線
2018-07-18 14:35:004894 
軌跡跟蹤嵌入式氣動(dòng)伺服控制器成果。主要內(nèi)容如下: 第一章:詳述嵌入式氣動(dòng)伺服控制器的研究進(jìn)展,以及氣動(dòng)伺服系統(tǒng)的結(jié)構(gòu)、建模和控制理論研究成果,明確了控制器主要研究內(nèi)容。 第二章:分析了直接/間接集成自適應(yīng)魯
2018-01-30 18:00:522 CAN(Controller Area Network)是由ISO定義的一種串行通信總線,它是一種能有效地支持高安全等級(jí)的分布實(shí)時(shí)控制的新一代網(wǎng)絡(luò)通信協(xié)議,屬于現(xiàn)場總線范疇。CAN最早被設(shè)計(jì)作為汽車
2018-03-26 15:59:006593 
基于CAN總線技術(shù)的多電機(jī)伺服控制系統(tǒng)網(wǎng)絡(luò)結(jié)構(gòu)如圖1所示,系統(tǒng)由上位機(jī)、CAN總線、現(xiàn)場伺服單元節(jié)點(diǎn)組成。數(shù)控系統(tǒng)上位機(jī)通過CAN總線控制網(wǎng)絡(luò)節(jié)點(diǎn)任一伺服單元,數(shù)字伺服與數(shù)控系統(tǒng)之間數(shù)據(jù)傳輸可分為
2020-03-19 08:05:001860 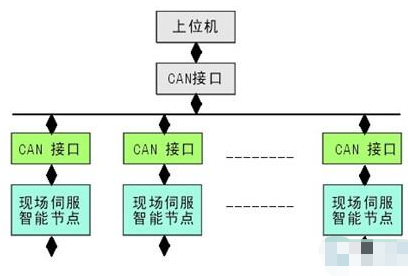
在這個(gè)項(xiàng)目中,我們將了解MCP2515 CAN控制器模塊,如何將MCP2515 CAN總線控制器與Arduino接口,以及如何在兩個(gè)MCP2515 CAN的幫助下實(shí)現(xiàn)兩個(gè)Arduino板之間的通信控制器和CAN協(xié)議。
2019-07-30 10:51:5819043 CAN 總線以其可靠、實(shí)時(shí)、低成本優(yōu)勢已在汽車、機(jī)械等工業(yè)控制領(lǐng)域廣泛應(yīng)用。TMS320F2812是TI公司最具代表性的低成本、低功耗和高性能的定點(diǎn)DSP芯片,具有強(qiáng)大的事件管理能力和嵌入式控制
2019-08-02 15:49:222290 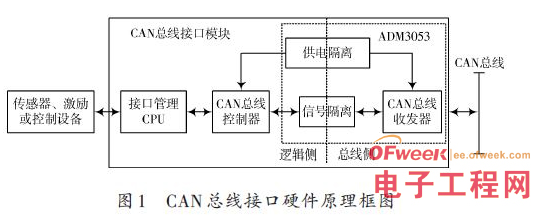
CAN控制器從控制單元中的微處理器接收數(shù)據(jù),處理數(shù)據(jù)并將其傳遞給CAN收發(fā)器。CAN收發(fā)器數(shù)據(jù)發(fā)送到總線或從總線接收到控制器。收發(fā)器也可以稱為驅(qū)動(dòng)器。
2020-01-28 10:13:001873 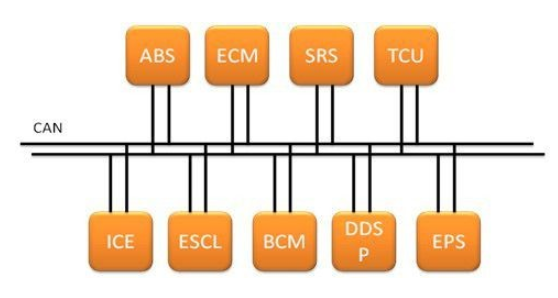
硬件電路的設(shè)計(jì)主要是CAN通信控制器與微處理器之間和CAN總線收發(fā)器與物理總線之間的接口電路的設(shè)計(jì)。CAN通信控制器是CAN總線接口電路的核心,主要完成CAN的通信協(xié)議,而CAN總線收發(fā)器的主要功能是增大通信距離,提高系統(tǒng)的瞬間抗干擾能力,保護(hù)總線,降低射頻干擾(RFI),實(shí)現(xiàn)熱防護(hù)等。
2020-03-13 10:45:506646 
介紹了一種用基于FPGA的DSP技術(shù)來設(shè)計(jì)電液伺服系統(tǒng)控制器的方法。該方法克服了傳統(tǒng)伺服控制器的一些不足, 可將許多復(fù)雜的實(shí)時(shí)控制算法硬件化實(shí)現(xiàn), 并根據(jù)控制效果的優(yōu)劣調(diào)整控制算法, 從而
2020-11-30 14:02:002192 
,什么是節(jié)點(diǎn)?節(jié)點(diǎn)就是掛在局域網(wǎng)上的一些控制器和CAN總線兩根線相連的,就是每一個(gè)控制器就稱為一個(gè)節(jié)點(diǎn),所以說一個(gè)節(jié)點(diǎn)就是一個(gè)控制器。
2021-02-23 10:22:504028 文章介紹了CAN總線通信協(xié)議和Motorola新一代嵌入式控制器DSP56F805內(nèi)置的用于實(shí)現(xiàn)CAN通信的MSCAN模塊,并通過編程實(shí)例說明了MSCAN模塊的應(yīng)用方法,最后介紹了研華公司生產(chǎn)的CAN總線通信卡PCL841的使用方法。
2021-03-15 16:24:2714 針對(duì)現(xiàn)場總線的實(shí)時(shí)性要求,提種基于DSP芯片TMs320LF2407A的CAN總線通信技術(shù)方案,設(shè)計(jì)了基于這種控制器的CAN網(wǎng)絡(luò)節(jié)點(diǎn)的硬件,而且利用T公司的CC4110軟件和聞亭公司
2021-03-22 17:17:549 在分析和研究高壓巡線機(jī)器人原控制器的基礎(chǔ)上,設(shè)計(jì)了一種基于DSP的全數(shù)字化控制器。該控制器采用主從式多處理器工作模式,用6個(gè)DSP對(duì)機(jī)器人12個(gè)關(guān)節(jié)的無刷直流電機(jī)進(jìn)行伺服控制,采用高速CAN總線實(shí)現(xiàn)
2021-05-07 09:30:548 TMS320F2812是TI公司新推出的DSP芯片,內(nèi)嵌CAN總線控制器eCAN模塊(以下簡稱為eCAN),性能較已有的DSP(如TMS320C24x)內(nèi)嵌的控制器有很大的提高;數(shù)據(jù)傳輸更加靈活方便
2021-05-19 10:55:245555 
MCP2510是Microchip公司生產(chǎn)的一種獨(dú)立的可編程CAN控制器芯片。本文將介紹新型的獨(dú)立CAN通信控制器MCP2510,并給出其在CAN總線系統(tǒng)智能節(jié)點(diǎn)中的應(yīng)用實(shí)例。
2021-06-23 15:16:333451 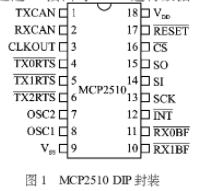
速率和較強(qiáng)的抗干擾能力,現(xiàn)已被廣泛地應(yīng)用于工業(yè)自動(dòng)化、交通工具、醫(yī)療器械、機(jī)械制造、樓宇控制、自動(dòng)化儀表等眾多領(lǐng)域。X281x?DSP集成了增強(qiáng)型CAN總線通信接口,能夠支持CAN2.0B協(xié)議。
2022-06-13 15:05:412 CAN 總線插卡可以任意插在 PC AT XT 兼容機(jī)上,方便地構(gòu)成分布式監(jiān)控系統(tǒng)。因此,用 FPGA 實(shí)現(xiàn) CAN 總線通信控制器具有非常重要的應(yīng)用價(jià)值。本篇將通過一個(gè)實(shí)例講解利用 FPGA 實(shí)現(xiàn) CAN 總線通信控制器的實(shí)現(xiàn)方法。
2022-07-29 09:43:222176 【導(dǎo)讀】介紹了CAN總線與伺服電機(jī)的特點(diǎn),并討論了伺服電機(jī)基于CAN總線的通信控制特性。
2022-12-27 10:57:565482 今天給大俠帶來基于FPGA的CAN總線控制器的設(shè)計(jì),由于篇幅較長,分三篇。今天帶來第一篇,上篇,CAN 總線協(xié)議解析以及 CAN 通信控制器程序基本框架。話不多說,上貨。
2023-05-18 09:21:30868 
控制器局域網(wǎng)總線Controller Area Network,簡稱CAN總線,是一種用于實(shí)時(shí)應(yīng)用的串行通訊協(xié)議總線,也是世界上應(yīng)用最廣泛的現(xiàn)場總線之一。
2023-06-14 17:43:49338 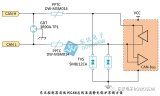
can總線 i/o模塊能否充當(dāng)控制器?答案當(dāng)然是不行!因?yàn)樗]有主站控制功能。 雖然都有總線接口,都集成了很多的IO,但can總線 i/o模塊并沒有被寫入控制程序,它的任務(wù)職責(zé)只是充當(dāng)
2023-06-28 08:35:02387 電子發(fā)燒友網(wǎng)站提供《CAN總線控制器MCP2515的原理及應(yīng)用.pdf》資料免費(fèi)下載
2023-10-13 10:47:103
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論