 電子發燒友App
電子發燒友App


對于城域網絡和長途網絡來說,如果光傳送層具有遠程重新配置的能力,則可以極大地降低運營成本。運營商也已經意識到這種潛力,并在最近業務網絡的招標中加入了對于可重配置光分插復用器(ROADM)以及多維光開關的要求。
對于ROADM這項新技術的關注開始于電信業大滑坡之際,當時,設備商紛紛在新產品開發上減少投資。幾乎沒有幾家公司顧得上認真地研究ROADM帶來的機會,而有些公司則爭先恐后地以最快的速度、最低廉的成本補全它們的產品線。不過值得慶幸的是:我們還可以通過其它方式來滿足ROADM這個新的市場需求。 ROADM是什么?
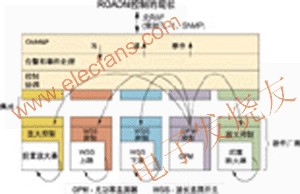
“ROADM”是指一種網絡元素(或稱節點),通過遠程的重新配置,可以動態上下業務波長,并且,業務波長的功率也是可以管理的。圖1是ROADM節點的一個通用模型,如圖所示,
ROADM的組成模塊隨應用的不同而不同。不過大多數ROADM都具有這里列出的模塊。
ROADM節點的主要功能模塊包括:
●前置和后置光放大器。
●光業務信道(OSC)的生成和終結。
●波長下路。
●波長上路。
●節點內部聚合信道或單信道的功率監控,可在節點內多處進行。
●可用/不可用和可選波長的監測,整個節點內的光信號的信噪比監測。
●上下路和直通波長的功率/衰減控制。
●色散補償。
●前置和后置放大器的增益均衡。
系統集成商所提供的ROADM產品隨應用的不同而不同。從相對廉價的基本系統到高度靈活的可擴展平臺,系統提供商需要選擇不同的系統結構和不同的下層器件技術來滿足市場提出的不同的成本和性能要求。
通常,系統集成商采用模塊化結構,以提高ROADM系統的部署效率,他們希望以最低的價格提供所需要的功能,并提供進一步擴展的空間,以滿足網絡擴展帶來的新的需求。
然而,隨著配置復雜性的增加,ROADM的控制環境也因為互通的元素數量增加、器件技術種類的增加和系統功能的物理分布等因素而變得越來越復雜。 關鍵光模塊ROADM設計者面臨的主要挑戰有:可選的技術種類太多,而且這些技術演進太快;另外,市場要求ROADM系統必須是支持多項應用的高性價比的模塊化系統。
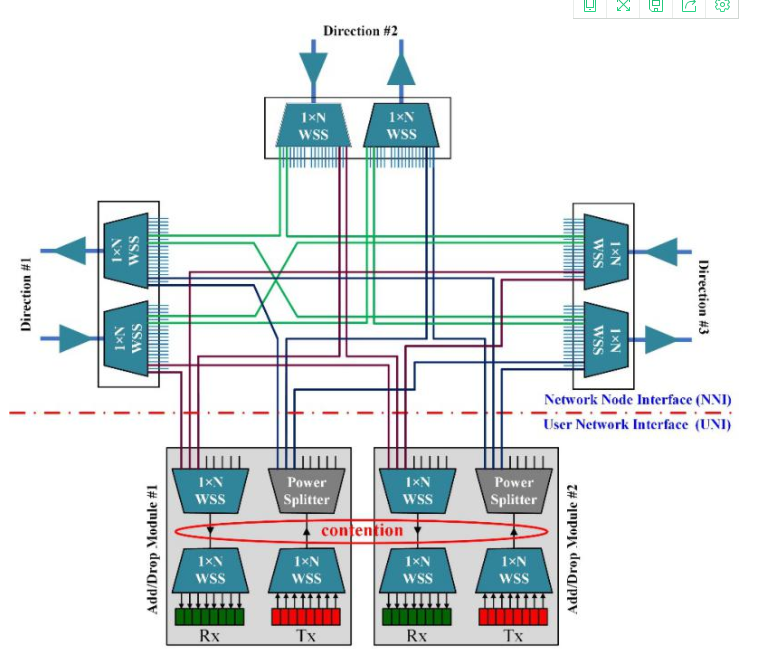
制造ROADM的兩種主要器件技術分別是基于體塊光學的波長選擇開關(WSS)技術和基于平面光路(PLC)的集成復用器/解復用器/光開關/可變光衰減器(VOA)和探測器技術。 在基于WSS技術的設備中,光性能監測器通常是一個分立的設備,一般放在一塊單獨的封裝電路中,前面放置一個N端口的光開關,以便幾個待測點共享一個監測器。在這種設備中,只有節點內部能夠相互通信,控制電路的功能才能實現。基于PLC的設備通常在每一個信道中集成了一個功率監測器,這樣就不需要外部的功率監測設備了。不過,它只在一個點上提供單信道功率監測,這對控制結構有很大的限制。
由于這些技術正處于快速演進的過程中,而哪種技術具有絕對優勢還無法預見,所以系統 集成商必須進行模塊化設計,以便以后用新的器件作替換時,需要重新設計的工作量最小。最后,為了滿足一些性能、容量要求較低,而成本要求較高的需求,控制體系必須在去掉某些器件后仍能正常運行。以上所述不僅對接口的一致性提出了一定程度的要求,而且要求盡可能對下層功能進行抽象,以便對其余節點提供統一的接口。
圖2是ROADM節點處的各種嵌入式控制智能。這里的ROADM是基于WSS技術的。
嵌入式控制包含幾個不同的控制機制和層次。設計者可以自己集成這些功能,不過這樣做復雜性和器件成本都很高。
所謂“嵌入式控制智能”,顧名思義,它的控制電路對于電路組件和光器件來說是處于本地的。根據光模塊提供智能的層次的不同,控制電路可以在電路組件的處理器上工作,也可以在光模塊內部的處理器上工作。一共有三種本地控制電路。第一種控制電路,由于所需的所有激勵信號都來源于器件,比如激光器的電流和襯底的溫度,所以它處于本地。第二種情況是:控制所需的帶寬很寬,排除了電路組件之間通信的可能,所以也只能在本地完成控制功能。第三種情況是:控制是在器件層發生的,但是需要高層的合作才能實現控制的功能。比如控制目標的設定,根據系統的狀態(如VOA的設置和EDFA的增益)改變控制行為等。
上述的本地控制是在一個單獨的光器件或者模塊內部進行的,而協調控制層的任務則是把多個不同的模塊和控制功能捆綁起來,使之成為一個可以工作的ROADM系統。這一層的具體功能包括:
●把遠程反饋信息導入本地控制電路。
●監測本地控制電路的運行狀態是否滿足規定。
●在啟動、關機和故障時協調各個本地電路之間的工作。
●根據節點的配置和狀態為下層的子系統設定運行任務(如:上下路業務的協調和上路業務的功率控制)
●當應用多點控制電路時,協調本節點和其它節點的工作。
告警和事件處理層根據運行、管理、維護和業務配給(OAM&P)系統設置的觸發點生成事件,聚合本地控制和協調控制功能產生的事件,并負責解除綁定、系統驗證、事件屏蔽和優先級設置。
OAM&P層提供人機接口的所有必需功能。OAM&P層為本地腳本接口或者遠程管理系統提供命令的翻譯,它把命令解析成為ROADM節點內部的配置信息和查詢操作。OAM&P層還負責由于系統配置改變而引起的通信事件和告警,它通過北向接口把消息發送到管理系統或者本地的腳本接口。另外,這一層還協助完成系統軟硬件的在線升級。
圖2描述的是傳統的開發模型,系統集成商使用分立的或者低級的光器件集成一個ROADM系統。系統集成商負責各個層次控制智能的開發工作,包括本地控制、協調控制、告警處理、通信和OAM&P。集成商對于平臺開發擁有完全的控制權,通過定制開發每一個光器件的控制程序和接口最有效地實現整個系統。
這種開發模型可以降低材料成本,但是因為一個系統中包括各種各樣的技術,所以這種開發模型需要在控制系統的開發方面注入相當大的投資。由于資源有限,縮減運營開銷的壓力也越來越大,所以ROADM的開發工作進行起來非常艱難。現在,希望開發ROADM的設備商(即使曾經有過幾家具有這種能力)已沒有幾家能夠支付得起這筆高額的內部開發費用。 向供應鏈上端轉移。盡管存在著種種限制,但是為了不放過ROADM這個機會。一些設備商開始發動他們的合作伙伴幫助他們填充產品線上的這項空白。而另一些設備商則求助于光器件提供商以降低開發的風險。和光網絡業外包的趨勢相同,設備商們把器件提供商推向價值鏈的上端,使其分擔更多ROADM開發的風險。
器件提供商們已做出積極的回應,他們已開始把擁有控制電路和軟件的智能光模塊提供給設備商,有時,甚至提供完整的線卡。圖3所示就是基于目前的電信供應鏈,實現ROADM控制功能的一個典型模型。
使用智能模塊和集成產品可以簡化ROADM的控制。但是現存的很多障礙限制了模塊所能提供的智能水平。
理想情況下,器件提供商在價值鏈上的這種上移會為系統集成商帶來高度集成化、智能化的現成器件,使他們能夠快速而高效地集成出ROADM產品。要使這種開發模型真正有效運作,設備商要求:
●關鍵光器件有多個供應源。
●器件具有標準的控制接口,抽象出下層的各種光學特性。
●所有部件的控制接口要具有一致性,這樣,才能快速協調地開發出系統。
不過,實際情況是,ROADM所需要的光模塊距離商用還很遠;技術和體系架構的多樣性阻礙了產品的及時開發;由于智能模塊提供商所提供的模塊智能程度不同,而且邏輯接口不一致,所以對于關鍵器件的二次開發尤其困難。
正如圖3所示,這樣的情況會迫使本地控制和協調控制層的工作量加大,材料成本增加。系統集成商必須根據每個控制器件和模塊對協調控制層的要求進行單獨的適配工作。同樣的,由于需要遵循多個系統提供商的特殊要求,器件提供商能夠打包到他們產品中的智能功能的水平也受到很大的限制。 優化外包模式當前ROADM的供應鏈模式之所以效率不高主要是因為協調控制功能的下層沒有標準化。如果系統集成商、器件提供商和簽約生產商同意使用標準的通信接口、配置模式、告警處理,那么,產品模塊和線卡就可以和高層系統互通,并兼容多系統生產商的要求。這樣就可以形成一個通用的協調控制框架,它可以幫助系統集成商及時開發產品,讓系統集成商把緊缺的資源用在差異化開發的工作中,以增加系統的附加值。
控制標準和協調框架的最終形成當然會落后于第一批ROADM的部署。當前,想要及時開發ROADM的系統集成商可以選擇依靠一個器件或者線卡供應商,或者與第三方控制方案提供商合作,由其針對系統集成商看好的器件提供商的產品,開發一致的增值控制方案。
不管采用哪種方式,系統集成商都可以利用通用、一致的控制接口和控制行為,把更多的ROADM的功能和開發風險轉移到供應商開發的增強型智能模塊中去。可以轉移到這種增強型的智能模塊中的功能包括:
●協調控制功能,封裝電路內部和封裝電路之間的反饋監測
●告警和事件處理
●在線固件和軟件升級
●自動配給業務和資源管理 統一結構
要實現器件的混和搭配和模塊化結構,關鍵是要設計一個統一的控制系統。這需要系統集成商在單個器件的開發,或者在標準的演進,抑或在使用第三方控制方案的過程中發揮更加積極的作用。第一種方案(系統集成商參與單個器件開發)需要系統集成商投入難得的研發資源,并且常常會導致系統的貨源單一,致使材料成本上升。第二種方案(系統集成商參與標準的演進)有可能降低開發成本,但通常標準化工作需要一個很長的時間,對一個快速演進的市場是不適合的。使用第三方控制方案做系統集成是一個可行的思路,不過需要系統集成商規定器件提供商的控制接口。
總之,通過標準化光網絡節點控制和協調的框架,或者通過把光器件的通用控制外包給第三方,系統集成商可以用更低的成本更快地迎接ROADM這個新機會的到來。通過建立一個通用的控制平臺,系統集成商不用花費很長的時間和很高成本,就可以在外包的智能模塊或者線卡上添加新的功能。
STM32/STM8
意法半導體/ST/STM











 工商網監
工商網監
評論