三相逆變器電壓閉環(huán)控制仿真 一、引言 三相逆變器是電力電子技術(shù)中的重要組成部分,廣泛應(yīng)用于新能源發(fā)電、電動汽車、工業(yè)自動化等領(lǐng)域。電壓閉環(huán)控制是逆變器控制策略中的一種常見方法,通過對輸出電壓進(jìn)行實(shí)時
2023-12-14 11:16:26 423
423 教程 [原創(chuàng)翻譯]狀態(tài)空間4-LQR控制 MATLAB官方教程作者使用直白的例子去描述LQR的cost function Q為狀態(tài)量的懲罰代價(jià)、R為推進(jìn)器(輸入)的懲罰代價(jià),通過構(gòu)建J
2021-08-30 08:00:03
lqr算法小程序,主動控制中可能用到。。。
2014-07-09 21:11:48
文章的STM32工程文件以及相關(guān)資料。2.3.1 解決的問題解決帶編碼器直流電機(jī)的速度閉環(huán)問題。2.3.2 PID理論將偏差的比例、積分、微分,通過線性組合構(gòu)成控制量,用控制量對被控對象進(jìn)行控制,這樣的控制器稱為PID控制器。在連續(xù)空間中,我們通常探討模擬PID的控制原理,如圖所示:我們這里用電機(jī)速度控制為例,
2021-08-04 07:07:33
,用于3個步進(jìn)電機(jī)軸,帶可選閉環(huán)操作,用于無傳感器負(fù)載相關(guān)電流控制的三軸步進(jìn)電機(jī)控制器/驅(qū)動器模塊。該設(shè)備由ADI Trinamic StallGuard2?、CoolStep、SpreadCycle?、StealthChop? 技術(shù)提供動力,并具有 SixPoint?和S形斜坡發(fā)生器。?
2022-11-12 11:24:12
規(guī)程對出廠前的控制器進(jìn)行完整的測試,完成了系統(tǒng)的閉環(huán)實(shí)時運(yùn)行。測試再次驗(yàn)證了 Easygo 仿真平臺的準(zhǔn)確性與可靠性,可為企業(yè)提供高效、安全的測試平臺。國電南瑞某分公司張工程師感慨道:“Easygo
2023-04-14 14:32:58
MCP2515是什么?MCP2515協(xié)議控制器有何功能?MCP2515協(xié)議控制器與MCU的連接是如何實(shí)現(xiàn)的?
2022-02-11 07:42:31
文章目錄一、實(shí)現(xiàn)電流閉環(huán)二、實(shí)現(xiàn)轉(zhuǎn)矩閉環(huán)Simulink永磁同步電機(jī)控制仿真系列文章已經(jīng)發(fā)布兩篇,每篇文章都開源simulink仿真模型。在此抄錄前兩篇文章地址,供有需要的朋友查閱。Simulink
2021-08-27 07:26:17
STC89C51控制器PID算法實(shí)現(xiàn)兩個PI調(diào)節(jié)器,分別構(gòu)成轉(zhuǎn)速、電流雙閉環(huán),采用TL094(PWM)脈寬調(diào)制器產(chǎn)生PWM波,再經(jīng)過TPS2812 MOSFET驅(qū)動器放大,最終實(shí)現(xiàn)調(diào)節(jié)給定改變PWM占空比進(jìn)而調(diào)...
2021-07-07 06:41:41
在運(yùn)動控制系統(tǒng)中,為了實(shí)現(xiàn)對電機(jī)速度或者位置的良好控制,常常采用多重閉環(huán)的結(jié)構(gòu)。比如有刷直流電機(jī)調(diào)速系統(tǒng),交流永磁同步電動機(jī)伺服系統(tǒng),都采用了類似的結(jié)構(gòu),除此之外,閉環(huán)系統(tǒng)一般采用 PI 控制器或者
2021-08-06 11:21:23
為什么選擇高速HIL仿真器來實(shí)現(xiàn)電機(jī)控制器測試?為何需要基于FPGA的硬件在環(huán)仿真器?
2021-04-28 06:33:38
基于模糊神經(jīng)網(wǎng)絡(luò)的非線性模型,并對比分析了三神方法,仿真中確定了電機(jī)的最優(yōu)開通關(guān)斷角,在此基礎(chǔ)上實(shí)現(xiàn)了電流斬波控制、角度位置控制、變幅值電流斬波控制以及分段雙閉環(huán)PI控制,仿真結(jié)果表明,它實(shí)現(xiàn)了電機(jī)的正常運(yùn)行,很好的抑止了電機(jī)轉(zhuǎn)矩脈動,同時有效地降低了噪聲。
2020-06-22 14:44:05
雙閉環(huán)直流調(diào)速系統(tǒng)仿真(Matlab)答辯人:王玲瓏 2011.05.07 雙閉環(huán)直流調(diào)速系統(tǒng)仿真 展示目錄 原始調(diào)速系統(tǒng)穩(wěn)定性分析 轉(zhuǎn)速、電流雙閉環(huán)直流調(diào)速系統(tǒng) 仿真環(huán)境中步長的選擇 調(diào)節(jié)器
2021-09-07 06:58:35
濾波器由選擇性諧波檢測環(huán)節(jié)、電壓控制和電流控制環(huán)節(jié)組成。為了補(bǔ)償數(shù)字控制器和逆變器帶來的延時, 在檢測環(huán)節(jié)中加入了預(yù)測補(bǔ)償角。電壓閉環(huán)控制方法借助檢測環(huán)節(jié)實(shí)現(xiàn)了對諧波電流發(fā)生電路中逆變器直流側(cè)的電壓
2008-08-23 17:01:31
在很多嵌入式控制系統(tǒng)中,系統(tǒng)既要完成大量的信息采集和復(fù)雜的算法,又要實(shí)現(xiàn)精確的控制功能。采用運(yùn)行有嵌入式Linux操作系統(tǒng)的ARM9微控制器完成信號采集及實(shí)現(xiàn)上層控制算法,并向DSP芯片發(fā)送上層算法得到控制參數(shù),DSP芯片根據(jù)獲得的參數(shù)和下層控制算法實(shí)現(xiàn)精確、可靠的閉環(huán)控制。
2019-08-19 06:29:34
最近一個月的時間沒有更博,跟隨老師出差談項(xiàng)目了。前段時間學(xué)習(xí)了電機(jī)的智能控制,這次把設(shè)計(jì)好的基于BP神經(jīng)網(wǎng)絡(luò)PID控制器應(yīng)用于雙閉環(huán)直流調(diào)速系統(tǒng)。雙閉環(huán)直流調(diào)速系統(tǒng)的動態(tài)數(shù)學(xué)模型如下圖所示: 外環(huán)為
2021-06-28 12:03:44
永磁同步電機(jī)(PMSM)基于模型的設(shè)計(jì),基于C200系列DS P控制器設(shè)計(jì),自動代碼生成。仿真模型,模塊化設(shè)計(jì),閉環(huán)控制,CCS自動燒寫。可提供設(shè)計(jì)文檔、PMSM控制器設(shè)計(jì)視頻。
2021-08-27 07:02:22
我要做基于CPLD的SPI控制器的研究與實(shí)現(xiàn),有沒有會的人,求教,有什么資料推薦點(diǎn)也行
2013-04-27 14:37:53
,死區(qū)時間可預(yù)置,并具有閉環(huán)調(diào)節(jié)功能等特點(diǎn)。整個電路通過FPGA芯片實(shí)現(xiàn),采用硬件描述語言(VHDL)與原理圖輸入相結(jié)合的方法,完成了整個功能模塊的設(shè)計(jì),使得控制系統(tǒng)更加簡單可靠。對所設(shè)計(jì)的控制器進(jìn)行了
2019-06-21 07:53:14
和閉環(huán)控制的選擇。實(shí)現(xiàn)PID控制器設(shè)計(jì)的VI前面板程序如圖1所示,可以幾乎同步得到仿真波形。 圖2 開環(huán)控制及波形圖3 閉環(huán)控制及波形 ② 框圖程序設(shè)計(jì)框圖程序是虛擬儀器的圖形化源代碼,與前面板相對應(yīng),連線表
2019-05-13 09:40:03
內(nèi)容簡介:課程設(shè)計(jì) 基于MATLAB的轉(zhuǎn)速電流雙閉環(huán)直流調(diào)速的仿真報(bào)告,共14頁,3394字摘要:本文分析了轉(zhuǎn)速電流雙閉環(huán)直流調(diào)速系統(tǒng)采用常規(guī)PI調(diào)節(jié)器進(jìn)行速度控制是存在的輸出限幅和轉(zhuǎn)速超調(diào)
2021-09-07 08:48:57
基于PID的電機(jī)閉環(huán)控制 導(dǎo)讀通過新華龍c8051f310單片機(jī)對三相異步電機(jī)進(jìn)行控制,主要介紹了三相電機(jī)控制器和鍵盤輸入顯示電路的設(shè)計(jì),實(shí)現(xiàn)了電機(jī)的閉環(huán)控制。在電機(jī)控制器的設(shè)計(jì)中,采用PID控制
2016-01-28 17:40:38
應(yīng)用VHDL語言設(shè)計(jì)數(shù)字系統(tǒng),大部分設(shè)計(jì)工作可在計(jì)算機(jī)上完成,從而縮短系統(tǒng)開發(fā)時間,提高工作效率。下面介紹基于VHDL設(shè)計(jì)交通燈控制器的一種方案,并給出源程序和仿真結(jié)果。
2019-10-18 07:21:51
通過Matlab/Simulink和Cadence PSpice聯(lián)合仿真驗(yàn)證了該新型控制方法具有很好的穩(wěn)定和瞬態(tài)響應(yīng)性能。 1雙閉環(huán)F-PID控制器的設(shè)計(jì)與實(shí)現(xiàn) 本文提出的控制方法直接以負(fù)載電流
2018-10-08 15:32:09
這是通過控制烘箱的溫度來控制顆粒的濕度,即有兩個閉環(huán)結(jié)構(gòu)串聯(lián)而成,外環(huán)是濕度閉環(huán),內(nèi)環(huán)是溫度閉環(huán),前面濕度PID控制器的輸出信號是后面溫度控制器的設(shè)定值,串級控制如圖所示:現(xiàn)在,內(nèi)環(huán)已經(jīng)完成,即
2014-07-27 09:53:31
如何實(shí)現(xiàn)雙路輸出控制器的設(shè)計(jì)?
2022-02-11 07:57:24
如何實(shí)現(xiàn)家電遠(yuǎn)程控制器的設(shè)計(jì)?實(shí)現(xiàn)家電遠(yuǎn)程控制的原理及系統(tǒng)結(jié)構(gòu)是什么?Actel數(shù)模結(jié)合FPGA的特點(diǎn)有哪些?
2021-04-08 06:37:35
如何實(shí)現(xiàn)直流減速電機(jī)的速度閉環(huán)控制呢?怎樣解決帶編碼器直流電機(jī)的速度閉環(huán)問題?
2021-10-19 06:05:56
本文提出了一種基于FPGA的SDRAM控制器的設(shè)計(jì)方法,并用Verilog給于實(shí)現(xiàn),仿真結(jié)果表明通過該方法設(shè)計(jì)實(shí)現(xiàn)的控制器可以在FPGA芯片內(nèi)組成如圖1所示的SDRAM接口,從而使得系統(tǒng)用戶對SDRAM的操作非常方便。
2021-04-15 06:46:56
關(guān)閉,而不是平坦地跑出并充滿該地方。Eco驅(qū)動器具有其他功能,如級聯(lián)控制和PID睡眠功能。這些參數(shù)是多功能閉環(huán)控制器的實(shí)用新增功能。 許多變頻驅(qū)動器應(yīng)用程序在開環(huán)或與其他控制系統(tǒng)一起工作,但對于簡單的應(yīng)用,內(nèi)置的閉環(huán)控制可以證明是非常有用的。
2021-01-19 15:41:09
如何利用C51匯編去實(shí)現(xiàn)一種時間控制器呢?如何對時間控制器進(jìn)行proteus仿真呢?
2022-01-26 07:32:30
本文主要描述如何利用 MSP430 系列微控制器實(shí)現(xiàn)數(shù)字風(fēng)扇控制系統(tǒng)的設(shè)計(jì)。1. 概述風(fēng)扇常用于驅(qū)散系統(tǒng)中產(chǎn)生的熱量,典型地應(yīng)用于電源系統(tǒng)或網(wǎng)絡(luò)服務(wù)器中。一般簡單的風(fēng)扇冷卻系統(tǒng)冷卻風(fēng)扇會一直在全速
2021-09-08 08:04:02
什么樣的反饋增益k才是最好的呢?如何利用simulink對LQR控制器進(jìn)行仿真呢?
2021-11-22 07:27:52
如何去實(shí)現(xiàn)一種視頻控制器的設(shè)計(jì)?
2021-06-04 06:03:31
SDRAM控制器基本操作原理是什么?如何去設(shè)計(jì)并實(shí)現(xiàn)一種SDRAM控制器?
2021-06-07 06:01:39
一種基于Internet的智能家庭網(wǎng)絡(luò)控制器的設(shè)計(jì)與實(shí)現(xiàn)
2021-06-04 06:39:09
無刷直流有哪些優(yōu)點(diǎn)?如何用NUCLEO-F103RB和X-NUCLEO-IHM07M1 3SH快速實(shí)現(xiàn)BLDC的閉環(huán)電流控制?
2021-09-22 07:14:51
本文介紹通過FPGA實(shí)現(xiàn)的步進(jìn)電機(jī)控制器。該控制器可以作為單片機(jī)或DSP的一個直接數(shù)字控制的外設(shè),只需向控制器的控制寄存器和分頻寄存器寫入數(shù)據(jù),即可實(shí)現(xiàn)對步進(jìn)電機(jī)的控制。
2021-04-29 06:05:44
快速浮_定點(diǎn)PID控制器FPGA的研究與實(shí)現(xiàn)提出了基于 的快速 控制器技術(shù),采用流水線運(yùn)算方法,具有高速 穩(wěn)定精確的實(shí)時控制性能,實(shí)現(xiàn)了速度和資源的優(yōu)化匹配研究并分析了位置式 不同算式的特點(diǎn),完成
2012-08-11 15:58:43
本文介紹VHDL-AMS的新概念和新特性。通過對PID控制原理進(jìn)行數(shù)學(xué)分析,建立PID控制器的數(shù)學(xué)模型,實(shí)現(xiàn)PID控制器的VHDL-AMS行為級建模,并進(jìn)行仿真分析。
2021-05-06 07:59:57
液晶控制器原理是什么?怎么實(shí)現(xiàn)基于CPLD的雙屏結(jié)構(gòu)液晶控制器的設(shè)計(jì)?
2021-06-04 06:09:55
本文在對異步串行通信協(xié)議進(jìn)行分析的基礎(chǔ)上,根據(jù)實(shí)際工程的需要,對異步串行通信控制器進(jìn)行了詳細(xì)設(shè)計(jì),并結(jié)合CPLD器件,采用VHDL語言,對設(shè)計(jì)方案進(jìn)行了實(shí)現(xiàn)和驗(yàn)證,通過最后時序仿真的波形圖得出
2021-05-28 06:53:11
本文介紹一種使用硬件描述語言VHDL來實(shí)現(xiàn)基于Petri網(wǎng)的并行控制器的方法。首先使用Petri網(wǎng)對問題進(jìn)行建模,并對模型進(jìn)行分析和控制,獲得控制器的Petri網(wǎng)模型;然后用VHDL對Petri網(wǎng)
2019-08-16 07:52:03
本文基于Matlab/Simulink RTW 和XPC Real-time Target實(shí)時仿真平臺,配合PCI數(shù)據(jù)采集卡底層軟件的開發(fā)和信號調(diào)理裝置硬件設(shè)計(jì),系統(tǒng)地實(shí)現(xiàn)了燃料電池汽車整車控制器仿真測試平臺。利用該平臺可以對整車控制器硬件電氣特性、底層軟件平臺和控制算法等進(jìn)行測試。
2021-05-14 06:04:10
親愛的朋友們,我正在研究一個8位PIC微控制器和16位MC56F82448 NXP控制器。PIC微控制器與藍(lán)牙模塊有關(guān),而nxp微控制器與藍(lán)牙模塊無關(guān)。我必須閃存nxp控制器而不需要連接任何仿真器
2020-04-06 13:23:25
PID控制的原理是什么?怎樣去編寫PID控制器和模糊控制器代碼呢?如何對PID控制器和模糊控制器進(jìn)行仿真呢?
2021-11-19 07:47:47
怎樣去設(shè)計(jì)高速PID控制器?怎樣對高速PID控制器進(jìn)行仿真?
2021-04-28 06:43:09
最小拍控制系統(tǒng)及直流電機(jī)閉環(huán)調(diào)速控制系統(tǒng)設(shè)計(jì)和實(shí)現(xiàn)實(shí)驗(yàn)報(bào)告班級:xx姓名: xx學(xué)號:xx時間: 第16周周日9-12節(jié)指導(dǎo)老師:xx老師最小拍控制系統(tǒng)一.實(shí)驗(yàn)?zāi)康?.掌握最小拍有紋波控制
2021-09-07 06:40:44
1.1 傳遞函數(shù)表達(dá)式對比1.2 波特圖對比2、離散化預(yù)備知識2.1 離散化表達(dá)式2.2 離散化方法2.3 離散化練習(xí)題3. 使用Matlab離散PR控制器4、逆變器仿真模型中使用PR閉環(huán)控制器
2018-12-20 18:43:11
求一個基于BP神經(jīng)網(wǎng)絡(luò)PID控制器應(yīng)用于雙閉環(huán)直流調(diào)速系統(tǒng)BP_PID控制器學(xué)習(xí)參數(shù)怎么設(shè)置?
2021-10-13 08:10:12
本文在開環(huán)時序仿真的基礎(chǔ)上提出一種基于QuartusII、DSP Builder和Modelsim的閉環(huán)時序仿真測試方法,并借助于某一特定智能控制器的設(shè)計(jì)對該閉環(huán)測試方法進(jìn)行了較為深入的研究。
2021-05-06 09:36:44
求基于步進(jìn)電機(jī)的閥門閉環(huán)控制的仿真,那位大俠幫幫忙
2012-10-22 23:44:35
滑模控制器的理論設(shè)計(jì)與仿真實(shí)現(xiàn)滑模控制器的設(shè)計(jì)與仿真實(shí)現(xiàn),可以具體參考我之前寫的博客文章如下:滑模變結(jié)構(gòu)控制SMC(一)——滑模變結(jié)構(gòu)控制的設(shè)計(jì)步驟滑模變結(jié)構(gòu)控制SMC(二)———滑模轉(zhuǎn)速控制器
2021-09-07 07:02:53
本文根據(jù)所設(shè)計(jì)的音頻控制器的結(jié)構(gòu)詳細(xì)介紹了構(gòu)建SoC內(nèi)核仿真環(huán)境來測試音頻控制器的思想和實(shí)現(xiàn)方法。
2021-06-07 07:07:58
誰有歐***的結(jié)構(gòu)振動控制書怎么考慮時滯的lqr(matlab)算法程序?跪求。。。
2014-07-09 22:48:12
有沒有路燈控制器仿真圖,急需謝謝
2015-05-10 16:28:34
利用LabVIEW虛擬儀器開發(fā)平臺,設(shè)計(jì)一個程序,可以對3階以內(nèi)的線性被控對象快速的確定PID控制器的各個參數(shù),完成PID控制器的設(shè)計(jì)并給出控制系統(tǒng)開環(huán)或者閉環(huán)的階躍響應(yīng)。 PID控制調(diào)節(jié)原理簡單
2019-04-23 09:40:04
一、理論下圖是采用了PID控制器的閉環(huán)控制策略。 PID控制器的傳遞函數(shù): 上式中,Y是控制器的輸出,U是控制器的輸入。有時候,在Matlab仿真中已經(jīng)調(diào)好了Kp和Ki、Kd參數(shù),但是離散化后,系數(shù)
2021-08-23 07:07:20
音頻控制器的結(jié)構(gòu)和原理是什么?SOC仿真環(huán)境的構(gòu)成和原理是什么?
2021-06-04 06:40:21
設(shè)計(jì)了直升機(jī)LQR 最優(yōu)控制系統(tǒng),并針對LQR 控制中加權(quán)矩陣Q和R 難以確定的問題,進(jìn)行了試驗(yàn)分析,從實(shí)際控制效果出發(fā),找出了系統(tǒng)響應(yīng)與Q和R 之間遵循的規(guī)律,為在利用該方法
2009-06-06 16:00:57 19
19 應(yīng)用MC68HC05B6微控制器單元實(shí)現(xiàn)伺服電機(jī)閉環(huán)速度控制的基本電路及軟件:
2009-06-19 09:18:2322 本文在MATLAB 環(huán)境下建立了二級倒立擺的半物理實(shí)時仿真模型,并應(yīng)用線性二次型最優(yōu)控制策略,設(shè)計(jì)了一個二級倒立擺LQR 控制器。在實(shí)驗(yàn)中,運(yùn)行該半實(shí)物仿真模型,成功的
2009-07-31 08:51:3127 本文針對LQR 控制在單級倒立擺控制中的不足,設(shè)計(jì)了一個LQR 結(jié)合PID 的復(fù)合控制。并在Borland c 語言環(huán)境下編寫控制程序,成功實(shí)現(xiàn)倒立擺的控制,其控制效果比單一LQR控制的抗擾
2009-08-15 10:54:1621 在建立全橋DC/DC 變換器小信號模型的基礎(chǔ)上研究雙閉環(huán)控制系統(tǒng),應(yīng)用自動控制理論以及Matlab 仿真工具對控制參數(shù)進(jìn)行整定,得到了穩(wěn)流型開關(guān)電源的數(shù)學(xué)模型。最后采用Simetrix
2010-01-20 15:19:460 仿真自然風(fēng)控制器:仿真自然風(fēng)控制器由整流電路,時鐘信號源,計(jì)數(shù)分配器,隨機(jī)信號源,模擬電子開關(guān),定時選擇開關(guān)及可控硅控制電路組成。
2007-12-14 08:20:17534 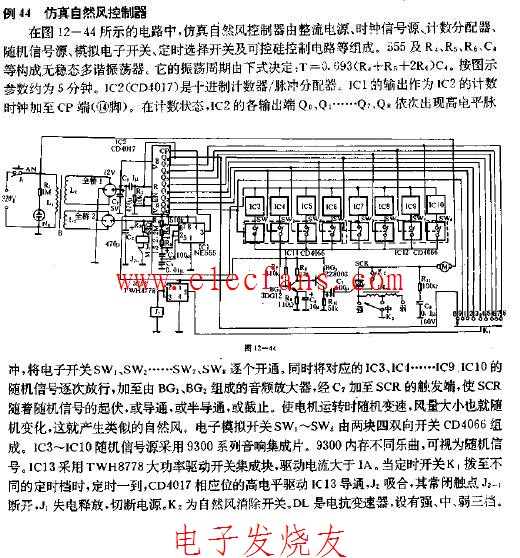
將LQR的算法與遺傳算法下的LQR算法相結(jié)合,得到最優(yōu)化下的轉(zhuǎn)態(tài)空間反饋矩陣
2015-10-28 11:41:022 時間控制器_Proteus仿真程序。
2015-12-18 11:46:419 參數(shù)自整定PID控制器設(shè)計(jì)與仿真,下來看看
2016-03-31 17:46:3333 MPC(Model Predictive Control,模型預(yù)測控制)和LQR(Linear–Quadratic Regulator,線性二次調(diào)解器) 在狀態(tài)方程、控制實(shí)現(xiàn)等方面,有很多
2019-03-22 17:08:0813823 一些閉環(huán)運(yùn)動控制的應(yīng)用很顯然需要運(yùn)動控制器,然而一些人也可以通過使用PLC來實(shí)現(xiàn)閉環(huán)控制。當(dāng)然,選擇何種控制方式常常難以定論。
2019-05-15 11:24:167336 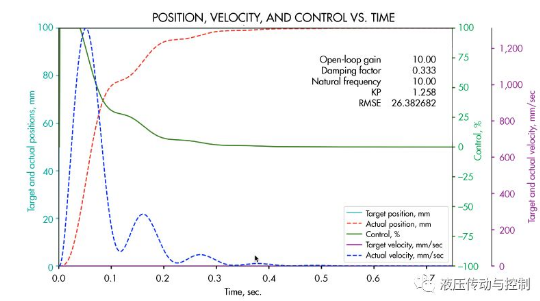
三相逆變器的負(fù)載時,鈉燈不能穩(wěn)定的工作(會高頻率地閃爍),針對這一問題,在雙閉環(huán)PI的基礎(chǔ)上加重復(fù)控制補(bǔ)償,建立MATLAB 仿真,并在雙DSP+FPGA 硬件架構(gòu)中高效精確的實(shí)現(xiàn)。實(shí)驗(yàn)結(jié)果表明,加上重復(fù)控制補(bǔ)償后,鈉燈能夠穩(wěn)定的工作,三相逆變器的穩(wěn)態(tài)性能得到了很大的改善。
2020-01-14 16:36:4610392 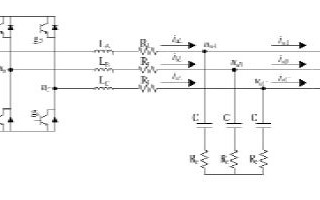
工程師能夠在控制器實(shí)現(xiàn)之前評估和驗(yàn)證其設(shè)計(jì)。 在進(jìn)行以下工作時您應(yīng)當(dāng)考慮使用電力電子仿真: ? 設(shè)計(jì)和驗(yàn)證新拓?fù)浜?b class="flag-6" style="color: red">控制策略 使用包含電源,功率半導(dǎo)體,無源電路元件以及PMSM和感應(yīng)電機(jī)等元件庫優(yōu)化系統(tǒng)行為 分析系統(tǒng)對
2023-02-03 15:14:44448 隨著公司低壓直流伺服電機(jī)控制器的銷量增加,客戶反饋伺服控制器速度開環(huán)和速度閉環(huán)區(qū)別不是很明白,現(xiàn)對客戶反饋的速度閉環(huán)問題匯總整理及解決方案如下。
2021-09-08 09:16:552164 閉環(huán)PID直流穩(wěn)壓仿真與控制一體化設(shè)計(jì)(第十一屆亞洲電源技術(shù)論壇)-文檔為閉環(huán)PID直流穩(wěn)壓仿真與控制一體化設(shè)計(jì)詳解文檔,是一份不錯的參考資料,感興趣的可以下載看看,,,,,,,,,,,,,
2021-09-17 15:28:162 DCDC傳統(tǒng)雙閉環(huán)控制器(深圳核達(dá)中遠(yuǎn)通電源技術(shù)有限公司怎么樣)-該文檔為DCDC傳統(tǒng)雙閉環(huán)控制器總結(jié)文檔,是一份不錯的參考資料,感興趣的可以下載看看,,,,,,,,,,,,,,,,,
2021-09-22 12:08:1153 雙閉環(huán)直流調(diào)速系統(tǒng)中電流環(huán)的仿真模型(通信電源技術(shù)審稿費(fèi))-轉(zhuǎn)速電流雙閉環(huán)直流調(diào)速系統(tǒng)中,電流環(huán)的仿真模型。
2021-09-28 14:24:1654 在硬件測試開始之前,電力電子仿真可以在開發(fā)早期提供研究數(shù)字控制算法、功率半導(dǎo)體和電氣系統(tǒng)之間關(guān)系的方法。對于電池管理系統(tǒng)和基于電力電子的系統(tǒng),如電機(jī)驅(qū)動器,功率變換器和逆變器,快速閉環(huán)仿真使電力電子工程師能夠在控制器實(shí)現(xiàn)之前評估和驗(yàn)證其設(shè)計(jì)。
2022-04-25 15:35:021273 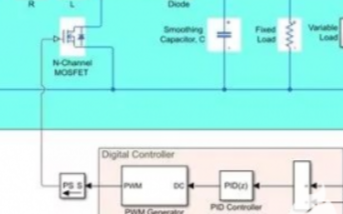
LLC閉環(huán)仿真,用MATLAB2018仿真軟件
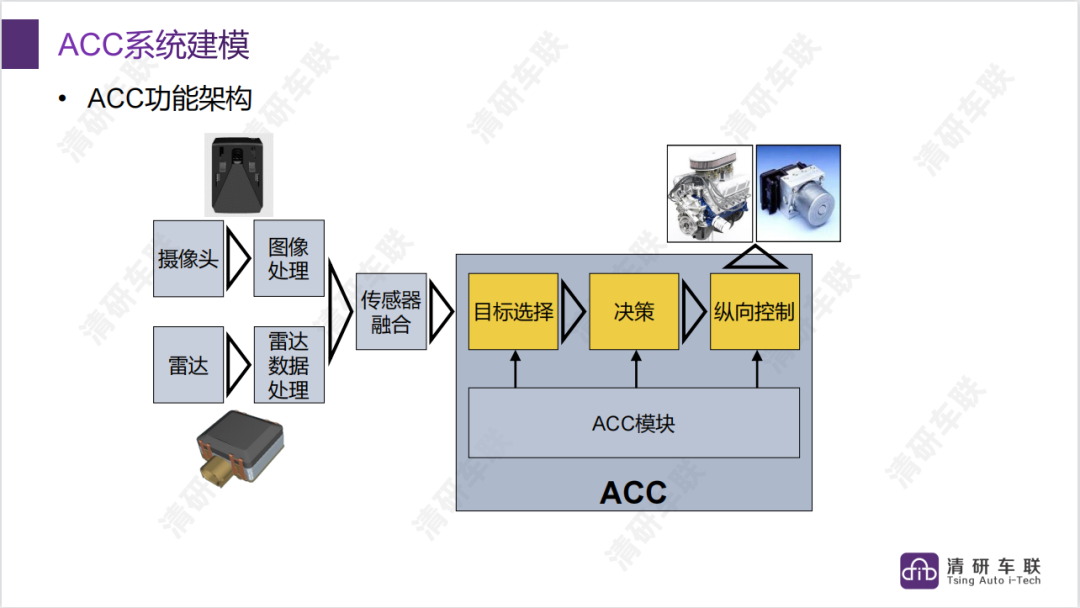
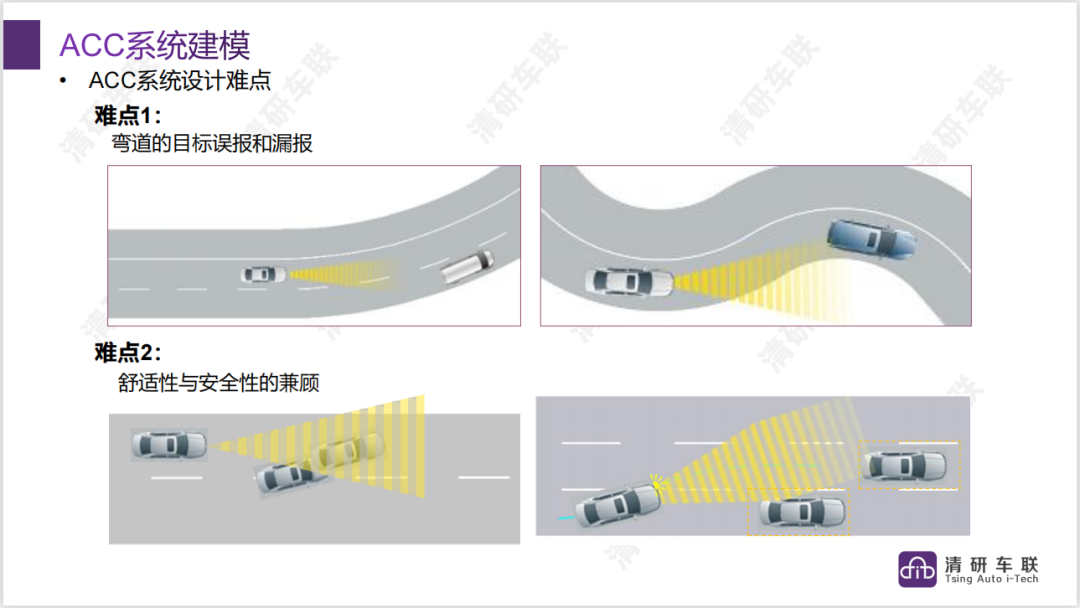
2022-12-02 16:41:2911 ACC系統(tǒng)沒有完全控制汽車的行駛。目前搭載的的ACC系統(tǒng)一般主要考慮駕駛的舒適感。因而ACC系統(tǒng)對于剎車的干預(yù)程度最大僅有剎車力的30%,汽車的最終控制權(quán)仍掌握在駕駛者手中。
2023-01-04 10:02:542828 三相LLC能大幅度的降低輸出紋波電流,而且能擴(kuò)展單相LLC的輸出功率范圍。在中大功率的應(yīng)用上,是非常適合的選擇。本文將提供一種三相LLC的閉環(huán)仿真模型的實(shí)現(xiàn)方法。
2023-02-08 17:05:221768 
上期介紹了DROOP控制,本期來詳細(xì)介紹下 VF控制SIMUlink實(shí)現(xiàn)方案 ,以及 對標(biāo)實(shí)際控制器的“仿真”教程1.VF控制框圖2.電壓電流雙閉環(huán)解耦控制具體的內(nèi)容可參見這位帥哥的碩士論文: 張中
2023-03-02 15:28:433 根據(jù)之前設(shè)計(jì)的控制器和主電路,在Simulink上面進(jìn)行驗(yàn)證。 參考之前的博客 基于PI雙閉環(huán)解耦控制的三相SVPWM電壓型逆變器(1)--數(shù)學(xué)模型 基于PI雙閉環(huán)解耦控制的三相SVPWM電壓
2023-03-03 09:48:167 本次實(shí)驗(yàn)在第二篇文章的基礎(chǔ)上進(jìn)行,Simulink永磁同步電機(jī)控制仿真系列二:閉環(huán)控制前的準(zhǔn)備工作中已經(jīng)實(shí)現(xiàn)了永磁同步電機(jī)的開環(huán)控制,本節(jié)在原模型的基礎(chǔ)上添加反饋路徑,實(shí)現(xiàn)轉(zhuǎn)矩的電流閉環(huán)
控制
2023-03-15 09:55:031 PWM/轉(zhuǎn)速單閉環(huán)/轉(zhuǎn)速電流雙閉環(huán)電機(jī)控制Simulink仿真 實(shí)驗(yàn)室之前一直在用BBB板和ARM板通過驅(qū)動器控制電機(jī),最近實(shí)驗(yàn)室新買了一臺DSPACE平臺,具有運(yùn)行參數(shù)可視化、實(shí)時性高等特點(diǎn)
2023-05-05 14:30:480 LQR算法是最優(yōu)控制中經(jīng)典的算法,而且LQR是一個應(yīng)用較多的控制算法,所以在這里我以最優(yōu)控制為起點(diǎn)介紹LQR控制算法。
注意LQR控制算法的基礎(chǔ)是你要有現(xiàn)代控制理論的基礎(chǔ),需要知道狀態(tài)空間(State Space)。
2023-05-19 16:33:042983 
ACC簡介HICK時鐘校準(zhǔn)器(ACC)利用OTGFS作為設(shè)備時產(chǎn)生的SOF信號作為參考信號達(dá)到校準(zhǔn)HICK的目的,SOF信號為主機(jī)發(fā)給設(shè)備其周期為1ms的脈沖信號。ACC控制器采用“跨越回歸”算法
2023-04-25 11:45:19713 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論