 電子發燒友App
電子發燒友App


01 硬件介紹
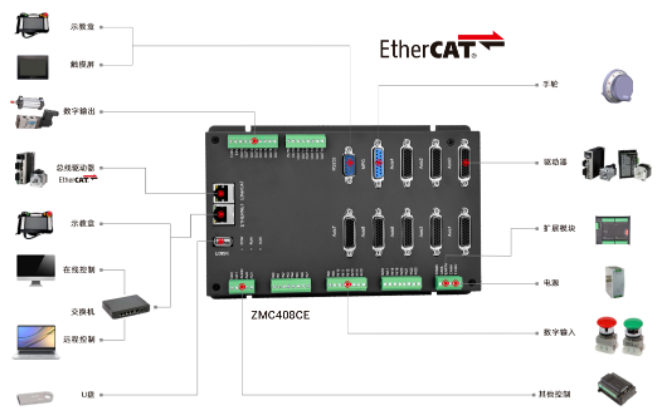
ZMC408CE是正運動推出的一款多軸高性能EtherCAT總線運動控制器,具有EtherCAT、EtherNET、RS232、CAN和U盤等通訊接口,ZMC系列運動控制器可應用于各種需要脫機或聯機運行的場合。
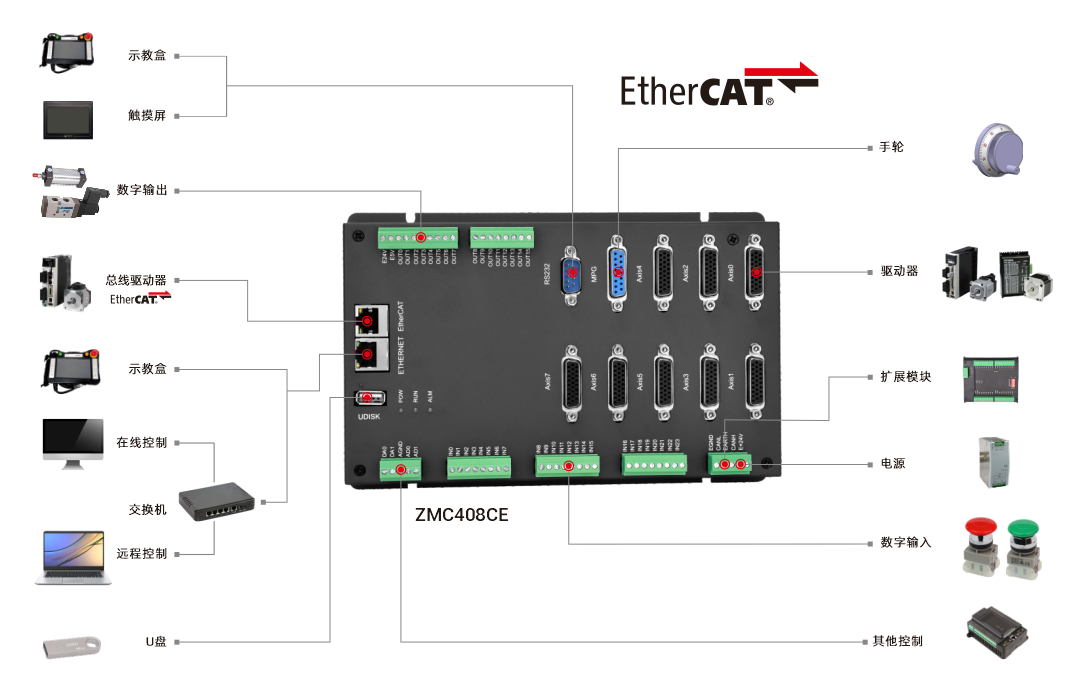
ZMC408CE支持8軸運動控制,最多可擴展至32軸,支持直線插補、任意圓弧插補、空間圓弧、螺旋插補、電子凸輪、電子齒輪、同步跟隨等功能。 ZMC408CE支持8軸運動控制,可采用脈沖軸(帶編碼器反饋)或EtherCAT總線軸,通用IO包含24個輸入口和16個輸出口,部分IO為高速IO,EtherCAT最快100us的刷新周期。
ZMC408CE支持8個通道的硬件比較輸出、硬件定時器、運動中精準輸出,還支持8通道PWM輸出,對應的輸出口為OUT0-7,支持8個通道同時觸發硬件比較輸出,用于多通道的視覺飛拍場合等。 ZMC408CE支持PLC、Basic、HMI組態三種編程方式。PC上位機API編程支持C#、C++、LabVIEW、Matlab、Qt、Linux、VB.Net、Python等接口。 ?
ZMC408CE內置高精度PSO位置同步輸出功能,在加工圓角與曲線時即使進行有減速調整,在高速加工的場合中也能控制激光輸出的等間距輸出。
02 PSO技術介紹 ?
PSO(position synchronized output)即位置同步輸出,本質是通過采集實時的編碼器反饋位置(無編碼器可使用輸出的脈沖位置)與比較模式設定的位置進行比較,控制OP高速同步輸出信號,PSO示意圖如下。
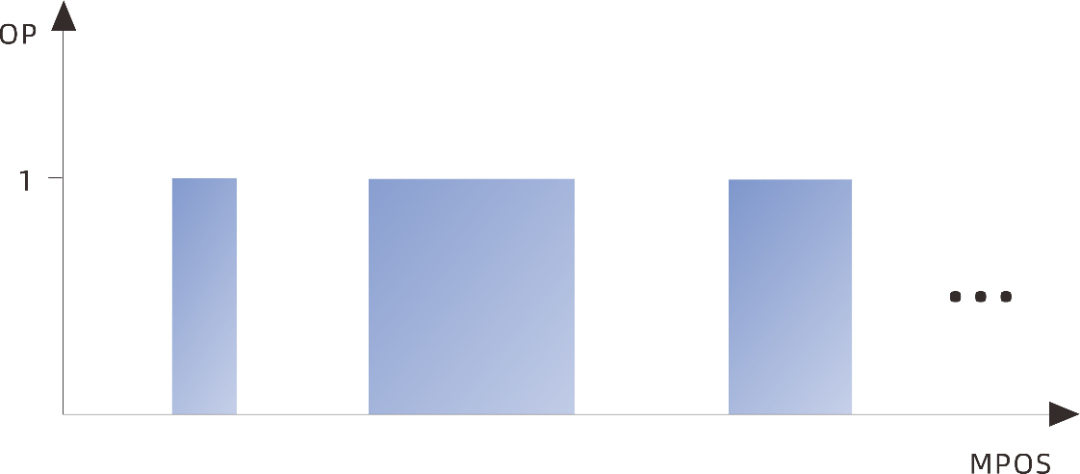
PSO一般與激光器(或點膠噴射閥等設備)同步輸出信號進行相位同步,在運動軌跡的所有階段以恒定的空間(或恒定時間)間隔觸發輸出開關,包括加速、減速和勻速段,從而實現脈沖能量均勻地作用在被加工物體上。 PSO功能的特點是能高速且穩定的輸出信號,因為輸出精度足夠高,所以能夠在整個運動軌跡中以固定的距離觸發輸出信號而不用考慮總體速度,即在直線部分以很快的速度運動,而在圓角部分減速的同時也能保證輸出間距恒定。 通常圓角加工部分在整個加工過程中占有比較小的部分,這樣在保證加工效果的同時,就可以最大限度地提高產能。
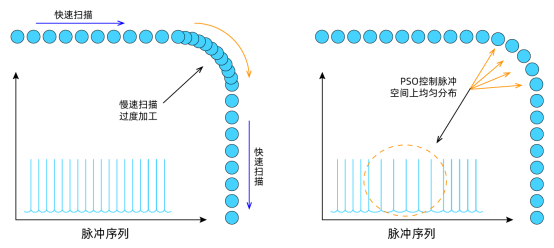
正運動的PSO功能調用ZAux_Direct_HwPswitch2函數接口實現,該函數采用硬件實現IO的高速比較輸出,響應速度達到微秒級別,故名硬件比較輸出。 ?
03 C++語言MFC進行運動控制項目的開發
1.新建MFC項目并添加函數庫
注:本例程在VS2010編譯環境下,基于.NET Framework 4.0框架創建的MFC窗體應用程序。
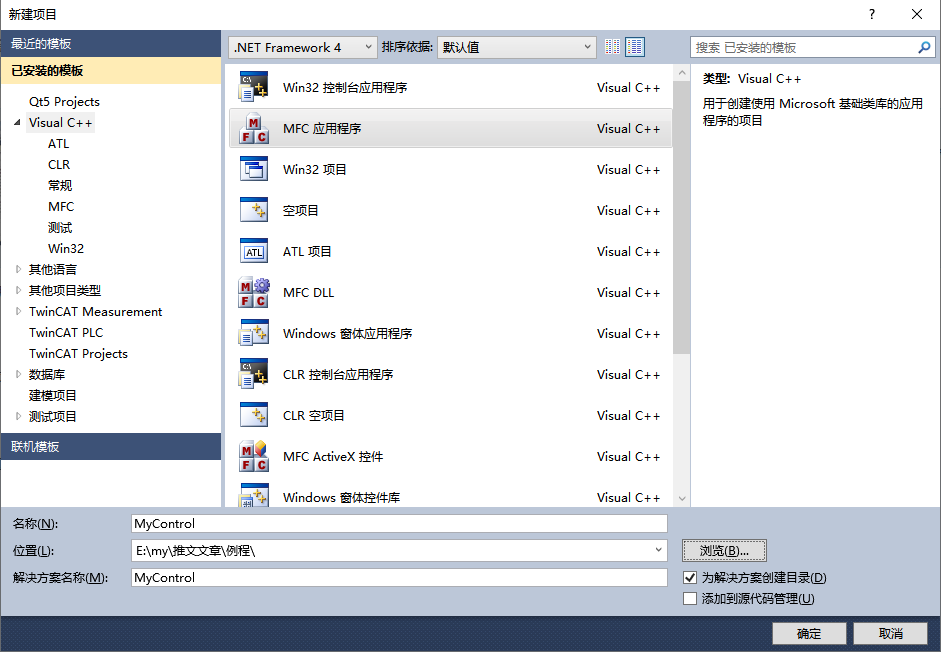
(1)工具欄菜單“文件”→“新建”→“項目”,啟動創建項目向導。
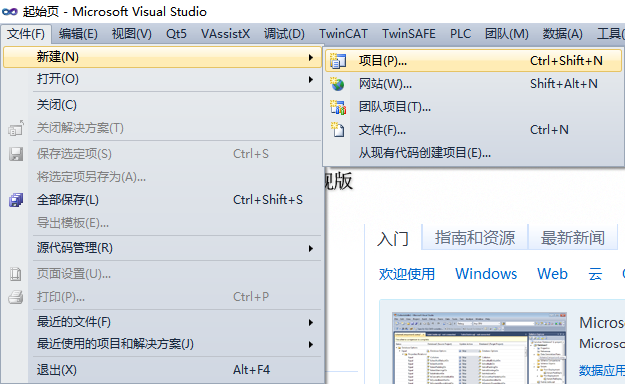
(2)選擇開發語言為“Visual C++”和.NET Framework 4以及MFC應用程序,填寫好程序名以及選擇好程序存放路徑,點擊確定。
(3)點擊下一步。
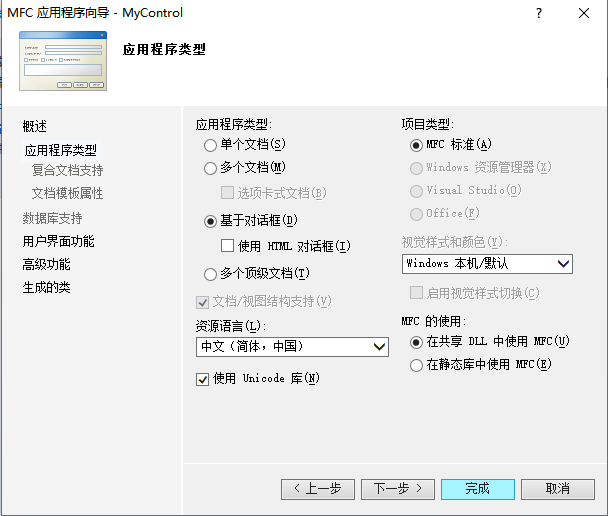
(4)選擇類型為“基于對話框”,點擊下一步或者完成即可。
2.找到廠家提供的C++函數庫文件
(1)進入廠商提供的光盤資料,找到“8.PC函數”文件夾,并點擊進入,找到C++函數庫,路徑如下(64位庫為例)。
(2)選擇“函數庫2.1”文件夾。
(3)選擇“Windows平臺”文件夾。
(4)根據需要選擇對應的函數庫,這里選擇“64位庫”。
(5)解壓C++壓縮包,里面有C++對應的函數庫。
(6)函數庫具體路徑如下。
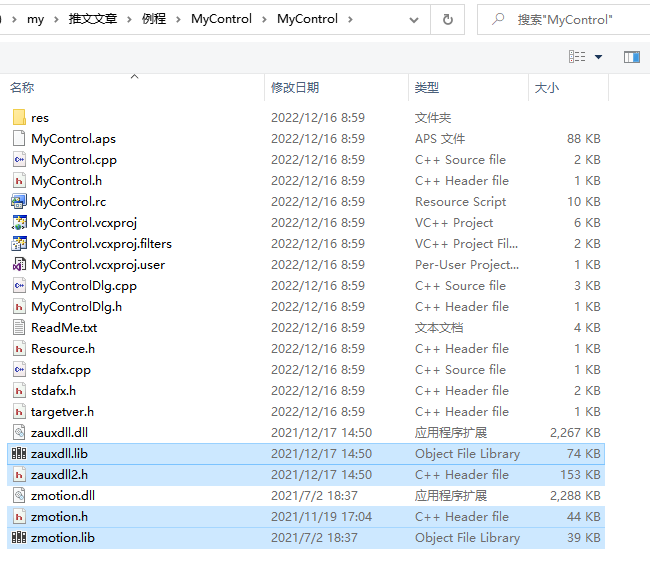
(7)將廠商提供的C++庫文件以及相關文件復制到新建的項目中。
3.在項目中添加靜態庫和相關頭文件
靜態庫:zauxdll.lib, zmotion.lib 相關頭文件:zauxdll2.h, zmotion.h
(1)先右擊頭文件,接著依次選擇:“添加”→“現有項”。
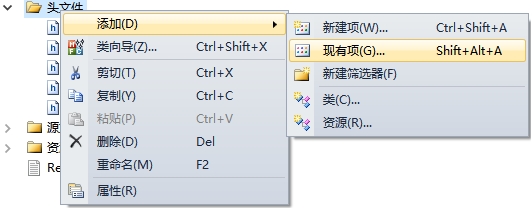
(2)在彈出的窗口中依次添加靜態庫和相關頭文件。
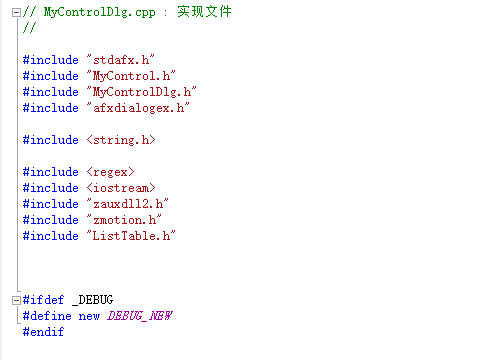
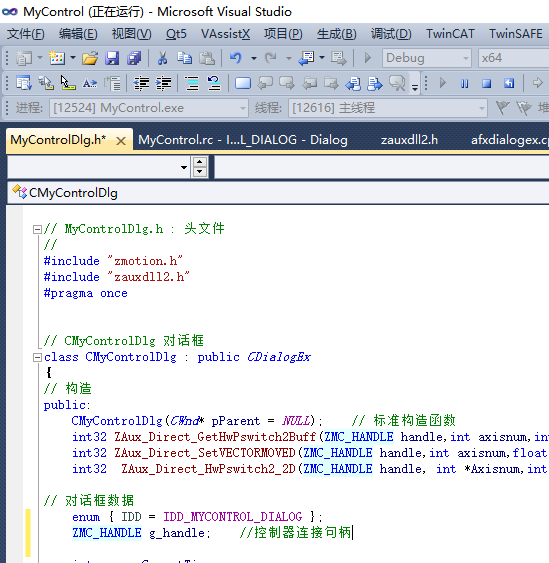
(3)聲明用到的頭文件和定義控制器連接句柄。
至此,項目新建完成。
4.查看PC函數手冊
用戶需要從PC函數手冊中獲取運動控制開發使用的函數接口,對照手冊說明使用,PC函數手冊在光盤資料查看,具體路徑如下:“光盤資料8.PC函數函數庫2.1Motion函數庫編程手冊V2.1.pdf”。
5.控制器網口連接函數接口
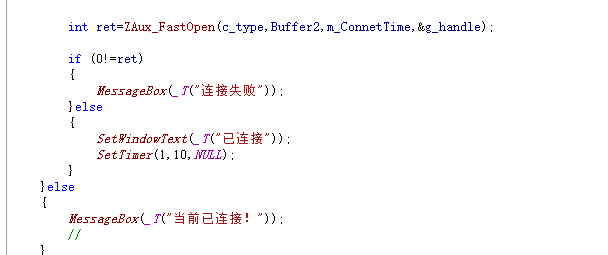
PC編程一般使用網口對控制器和工控機進行鏈接。ZAux_FastOpen();如果鏈接成功,該接口會返回一個鏈接句柄。通過操作這個鏈接句柄可以實現對控制器的控制。
ZAux_OpenEth()接口說明:
| 指令11 | ZAux_FastOpen | ||||||||
| 指令原型 | int32 ?__stdcall ?ZAux_FastOpen(int type, char *pconnectstring, uint32 uims ,ZMC_HANDLE * phandle) | ||||||||
| 指令說明 | 與控制器建立連接, 可以指定連接的等待時間 | ||||||||
| 輸入參數 |
|
||||||||
| 輸出參數 |
|
||||||||
| 返回值 | 成功返回值為0,非0詳見錯誤碼說明 | ||||||||
| 指令示例 |
1.串口連接: ZMC_HANDLE ?phandle;//控制器連接句柄 Char comID[32]= "0";//串口ID ZAux_FastOpen(1, comID,1000s ,&phandle); 2.網口連接例子: ZMC_HANDLE ?phandle;//控制器連接句柄 Char EthID[32]= "192.168.0.11";//網口ID ZAux_FastOpen(1, EthID,1000s ,&phandle); |
||||||||
| 詳細說明 | type設置為5,zmotion.dll版本要在3.8.8.50以上 |
項目應用截圖:
6.硬件比較輸出函數接口
使用對下位機寄存器操作的指令操作鏈接句柄“g_handle”,對控制器進行寄存器內容取值,實時控制下位機相關的指令如下。
實時全局變量指令:ZAux_Direct_HwPswitch2硬件比較輸出指令到位置后硬件自動觸發op輸出信號。
| 指令19 | ZAux_Direct_HwPswitch2 | ||||||||||||||||||
| 指令原型 | int32 ?__stdcall ?ZAux_Direct_HwPswitch2(ZMC_HANDLE handle,int ?Axisnum,int ?Mode, int ?Opnum, int ?Opstate, float ModeParal, float ModePara2, float ?Mode ?Para3 , float ?ModePara4) | ||||||||||||||||||
| 指令說明 |
硬件位置比較輸出2,4系列產品20170513以上版本支持。 ZMC306E/306N支持。 |
||||||||||||||||||
| 輸入參數 |
|
7.硬件定時器函數接口
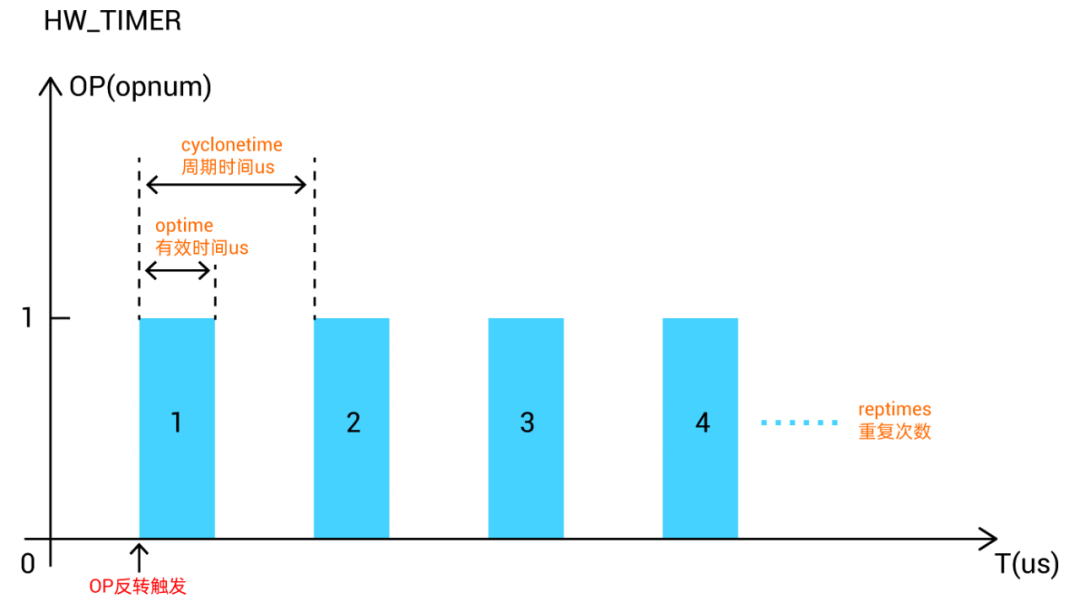
ZAux_Direct_HwTimer硬件定時器硬件比較輸出后一段時間還原電平。
| 指令21 | ZAux_Direct_HwTimer | ||||||||||||||||
| 指令原型 | int32 __stdcall ZAux_Direct_HwTimer(ZMC_HANDLE handle,int mode, int cyclonetime, int ?optime, int ?reptimes, int ?opstate, int ?opnum) | ||||||||||||||||
| 指令說明 | 硬件定時器用于硬件比較輸出后一段時見還原電平-4系列產品支持 | ||||||||||||||||
| 輸入參數 |
 |
||||||||||||||||
| 輸出參數 | / | ||||||||||||||||
| 返回值 | 成功返回值為0,非0詳見錯誤碼說明 | ||||||||||||||||
| 指令示例 |
//周期調整為2,輸出兩次 ZAux_Trigger(g_handle); ZAux_Direct_SetOp(g_handle, 0, 0); ZAux_Direct_HwTimer(g_handle, 2, 1000000, 500000, 2, 0, 0);//輸出口0變為on后,硬件定時器觸發開始計時,500ms后切換為off; ZAux_Direct_SetOp(g_handle, 0, 1); |
||||||||||||||||
| 詳細說明 |
(1)HW_TIMER只有1個,每次調用會強制停止之前的調用。 (2)ZMC420SCAN每個輸出口的HW_TIMER功能獨立。 (3)ZMC3系列部分、4系列及以上產品支持此功能。 (4)OP和MOVE_OP操作會關閉正在進行的HW_TIMER脈沖,這樣可以使用HW_TIMER來實現類似PWM的功能,OP輸出打開脈沖輸出,下一個OP輸出關閉脈沖輸出,當使用MOVE_OP精準輸出時,可以實現精準的PWM輸出無限脈沖功能。 |
04 MFC程序的運行和讀寫控制開發
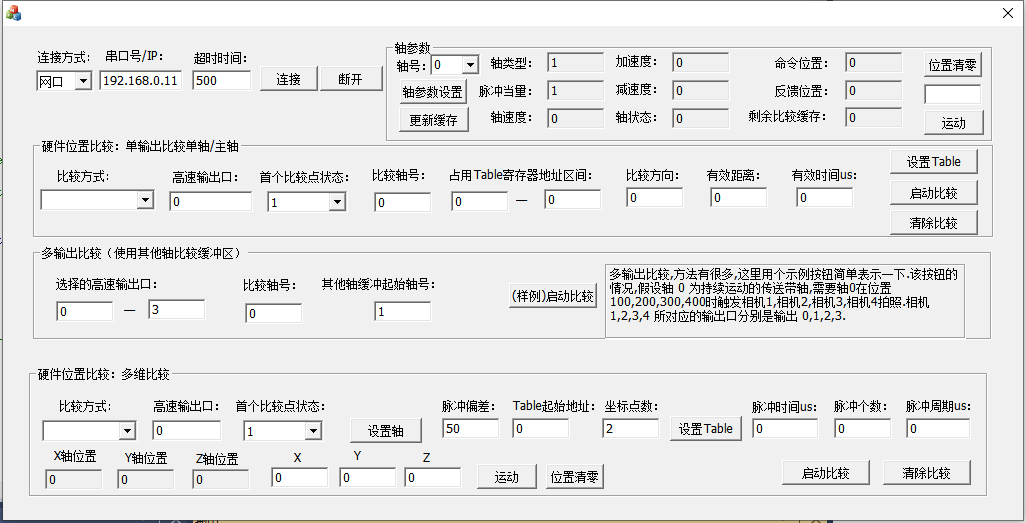
1.Demo交互界面如下
2.二維比較模式
(1)2D比較(模式25)
語法:HW_PSWITCH2(25,opnum,opstate,maxerr,num,tablepos) mode 25:二維的比較模式; opnum:對應的輸出口;
opstate:第一個比較點的輸出狀態;
maxerr:比較位置每個軸左右的脈沖偏差,進入偏差范圍后開始比較,此參數不能寫0;
num:table里面存儲的比較點坐標個數;
tablepos:第一個比較點坐標所在table編號。
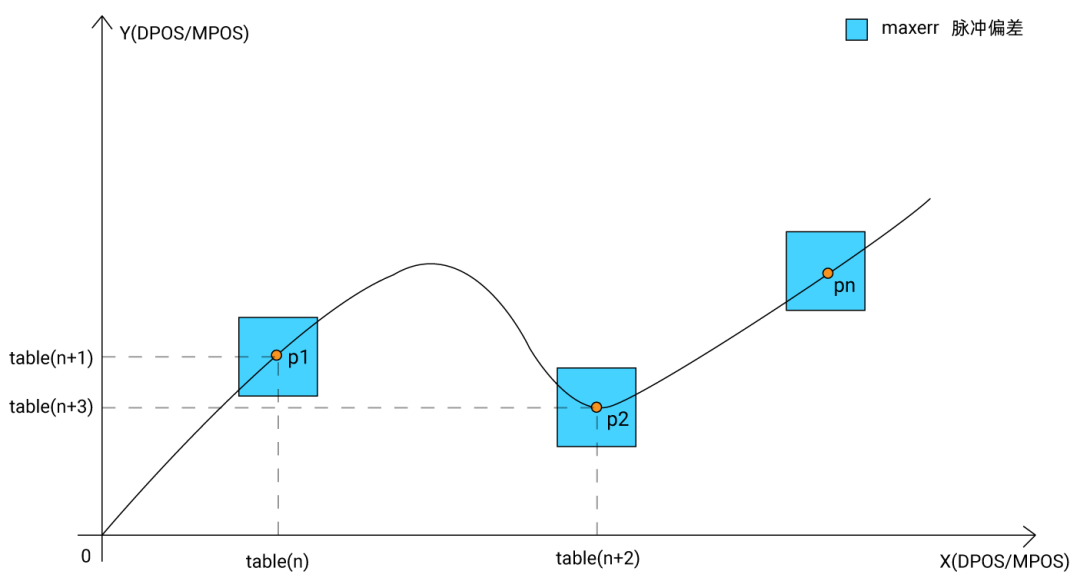
說明:比較點寫在TABLE中,兩個連續的TABLE數據組成一個2D坐標,每到達一個比較位置OP反轉一次。
圖中藍色段表示OP開啟,各類常用插補運動均支持比較,比較點坐標一定的要準確,否則會影響后面點的比較。
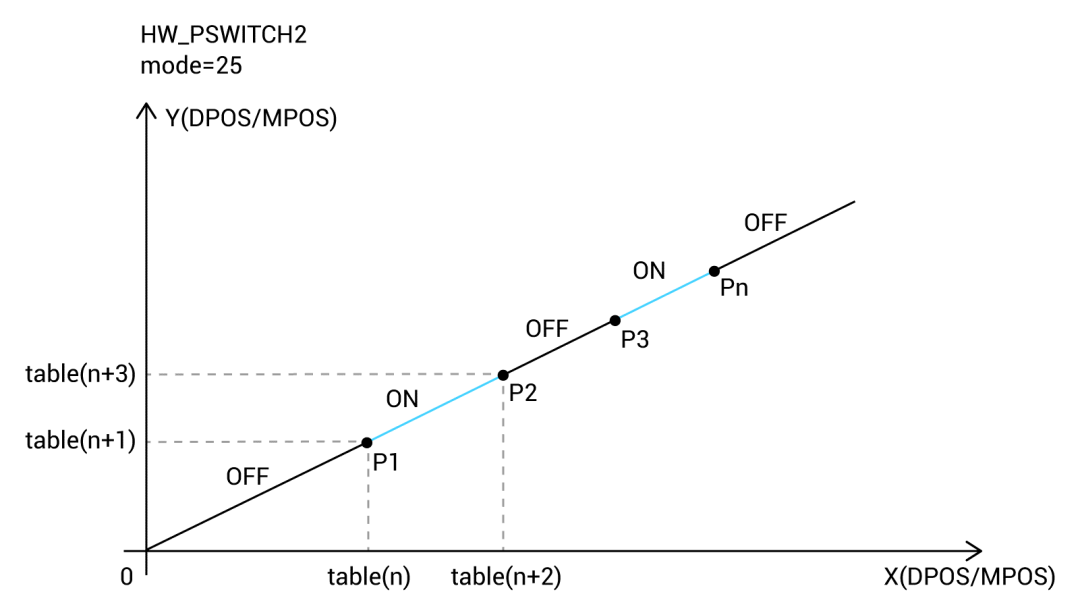
該模式主要功能為,碰到設置好的二維比較點之后,輸出口電平反轉。
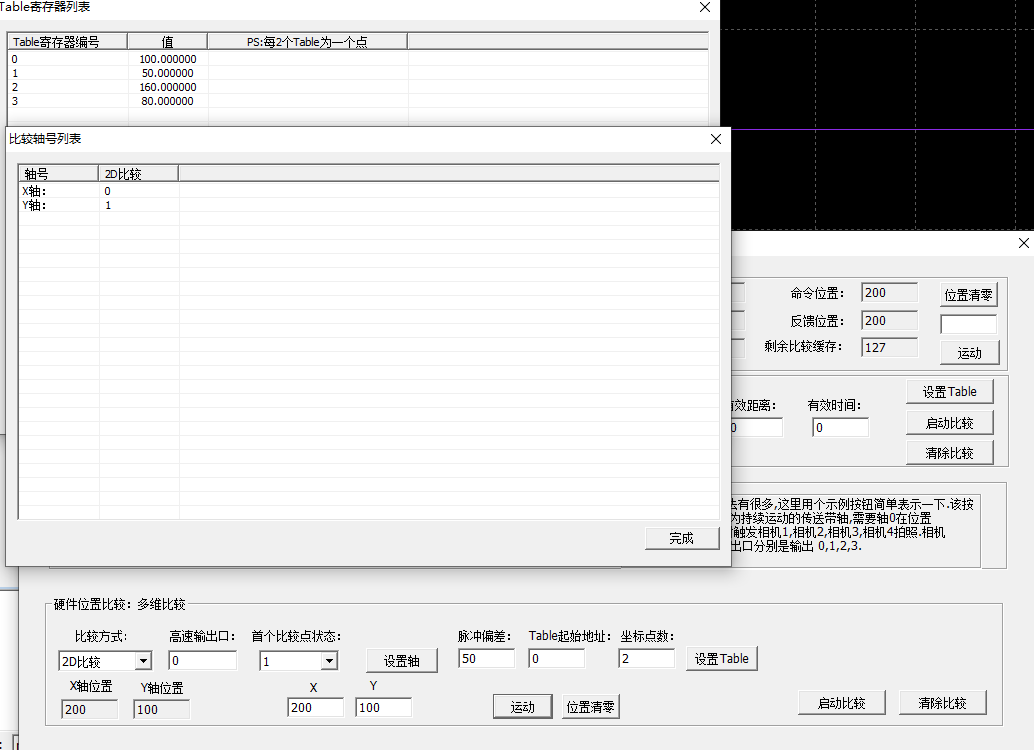
該模式使用時需要指定高速輸出口,將首個比較點的輸出狀態、比較軸設置好之后,再設置比較點(即設置table寄存器,點數量等),設置比較點脈沖最大誤差等參數后,啟動比較。緊接著驅動軸運動即可。
脈沖偏差說明:2D模式下設置XY坐標需要準確,軸運動不到準確的TABLE比較點時將無法觸發,3D模式同理。故多維比較模式引入一個特殊參數maxerr位置范圍偏差,左右范圍均有效,即實際位置坐標點與TABLE的比較點的差值在maxerr范圍內便有效,觸發時刻為當前位置進入比較點的觸發范圍內便觸發比較,比較范圍示意圖如下。
注意:maxerr的單位為脈沖數的偏差,不是距離的偏差。 如下圖所示,設置高速比較輸出口為0,首個比較點的輸出狀態為1,比較軸為0,1;設置兩個比較點,比較點坐標分別為:(100,50),(160,80)。即當軸運動到點(100,50)和點(160,80),誤差范圍在±50個脈沖左右的范圍時,都會觸發電平變化。
示波器波形如圖所示:在坐標(100,50)時輸出為1,直到坐標(160,80)的時候恢復為0。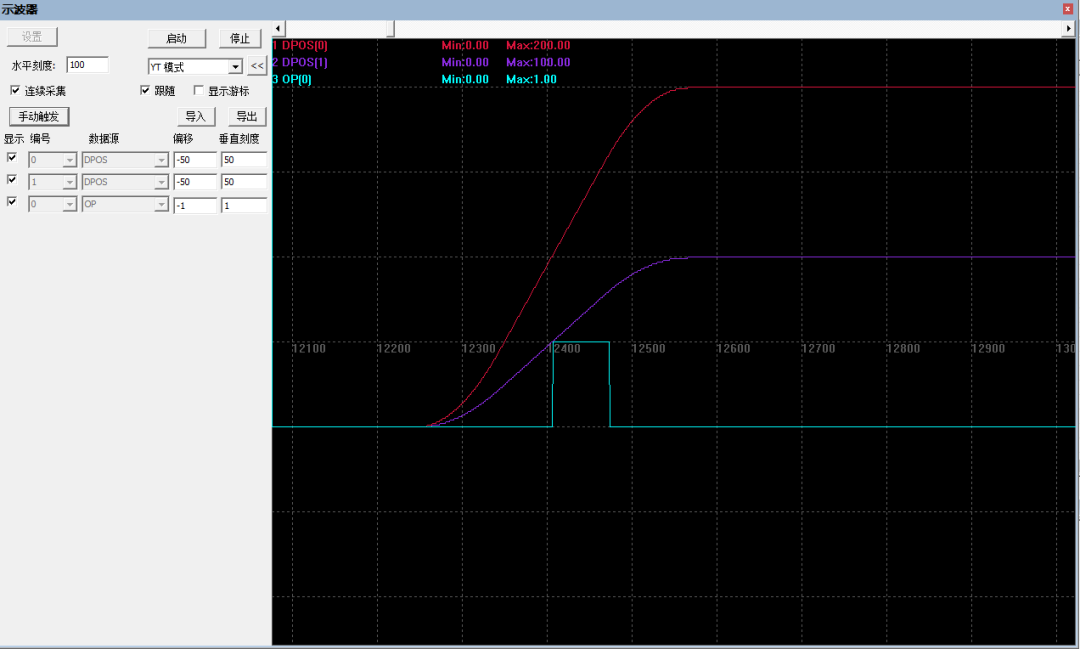
(2)2D比較(模式26)
語法:HW_PSWITCH2(26,opnum,opstate,maxerr,num,tablepos,[ophwtimeus,ophwtimes,hwcyctimeus])
mode 26:二維的比較模式; opnum:對應的輸出口; opstate:第一個比較點的輸出狀態; maxerr:比較位置每個軸左右的脈沖偏差,進入偏差范圍后開始比較,此參數不能寫0; num:table里面存儲的比較點坐標個數; tablepos:第一個比較點坐標所在table編號; * 以下參數和HW_TIMER二選一,HW_TIMER單獨寫可以動態調整參數 * ophwtimeus:脈沖時間; ophwtimes:脈沖個數; hwcyctimeus:脈沖周期。
說明:比較點寫在TABLE中,兩個連續的TABLE數據組成一個2D坐標,每到達一個比較位置觸發OP,每個比較點OP反轉的次數和反轉周期由HW_TIMER設置;到達下一個TABLE位置,OP再次觸發。類似模式7和模式36。
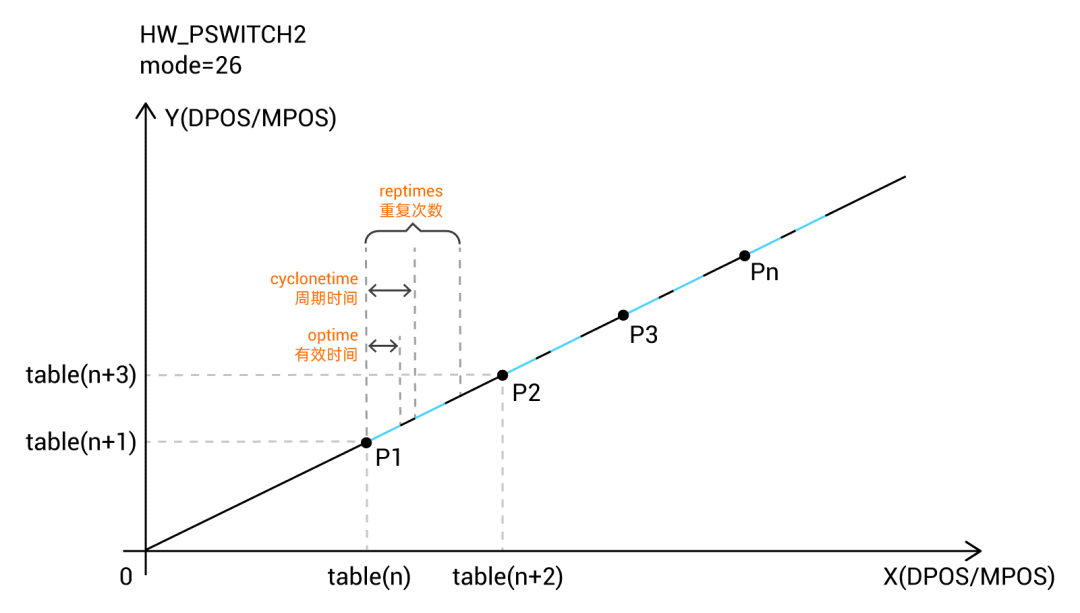
該模式主要功能為,碰到設置好的二維比較點之后,輸出口輸出一斷設置好的定時脈沖。 該模式使用時,需要指定高速輸出口,將首個比較點的輸出狀態、比較軸設置好之后,再設置比較點(即設置table寄存器,點數量等),設置好比較點之后再設置脈沖有效時間、脈沖周期時間,以及脈沖個數(重復次數),設置比較點的脈沖最大誤差等參數后,啟動比較。緊接著驅動軸運動即可。
如下圖所示,設置高速比較輸出口為0,首個比較點的輸出狀態為1,比較軸為0,1;設置兩個比較點,比較點坐標分別為:(100,100),(200,200)。即當軸運動到點(100,100),點(200,200),誤差范圍在±10個脈沖左右的范圍時,都會觸發兩個周期為60ms,脈沖有效時間為20ms的脈沖。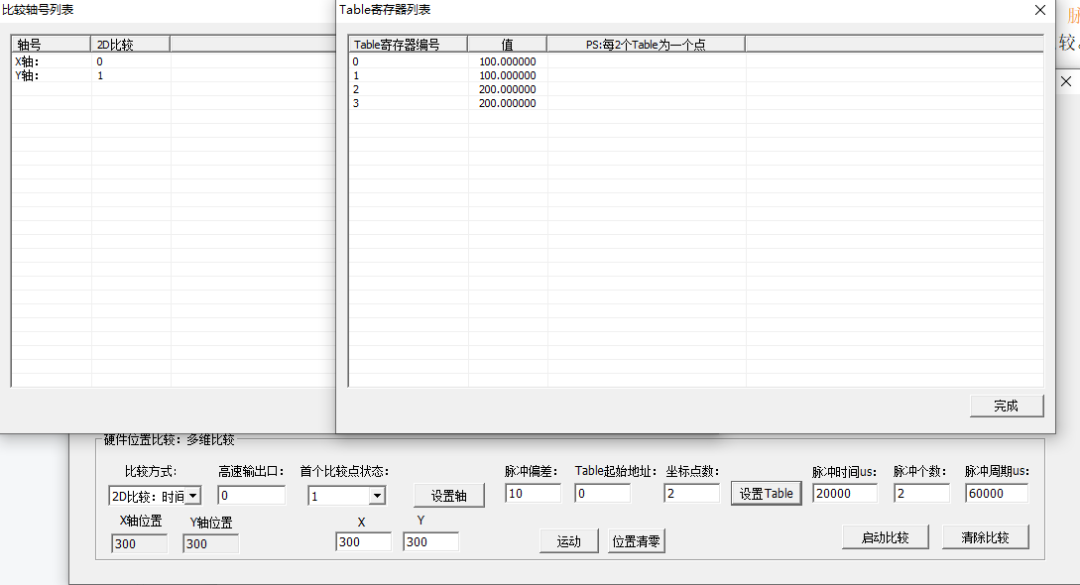
示波器波形如圖所示:在坐標(100,100),(200,200)的時候都會觸發兩個周期為60ms,脈沖有效時間為20ms的脈沖。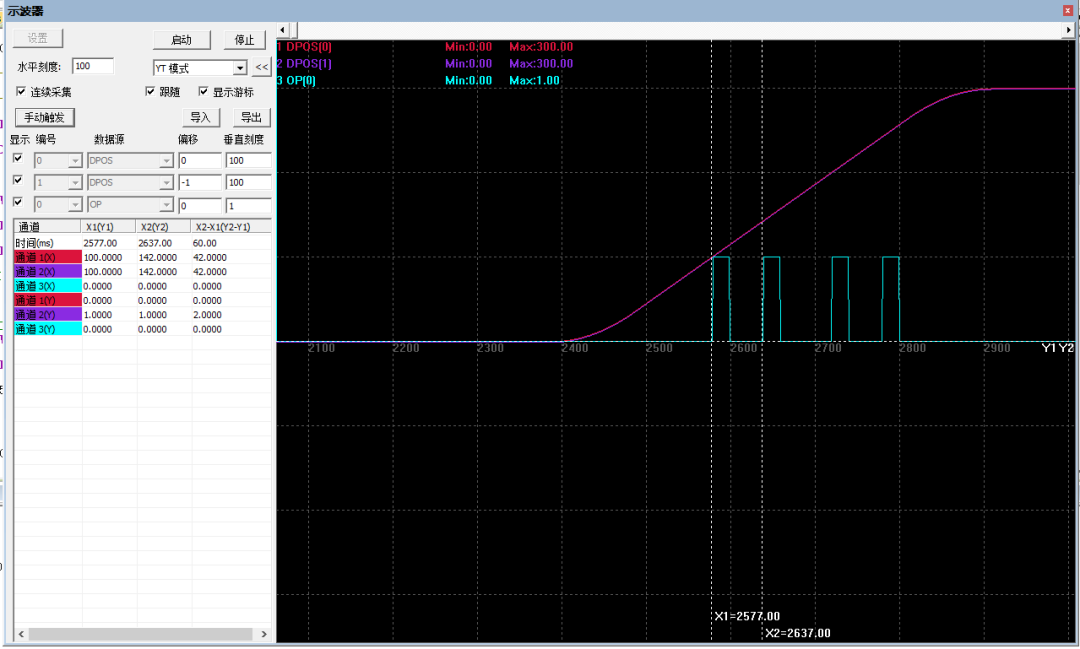
3.三維比較模式
(1)3D比較(模式35)
語法:HW_PSWITCH2(35,opnum,opstate,maxerr,num,tablepos)
mode 35:三維的比較模式; opnum:對應的輸出口; opstate:第一個比較點的輸出狀態; maxerr:比較位置每個軸左右的脈沖偏差,進入偏差范圍后開始比較,此參數不能寫0; num:table里面存儲的比較點坐標個數; tablepos:第一個比較點坐標所在table編號;
說明:比較點寫在TABLE中,三個連續的TABLE數據組成一個3D坐標,每到達一個比較位置觸發OP,每個比較點OP反轉的次數和反轉周期由HW_TIMER設置;到達下一個TABLE位置,OP再次觸發。類似模式26和模式7。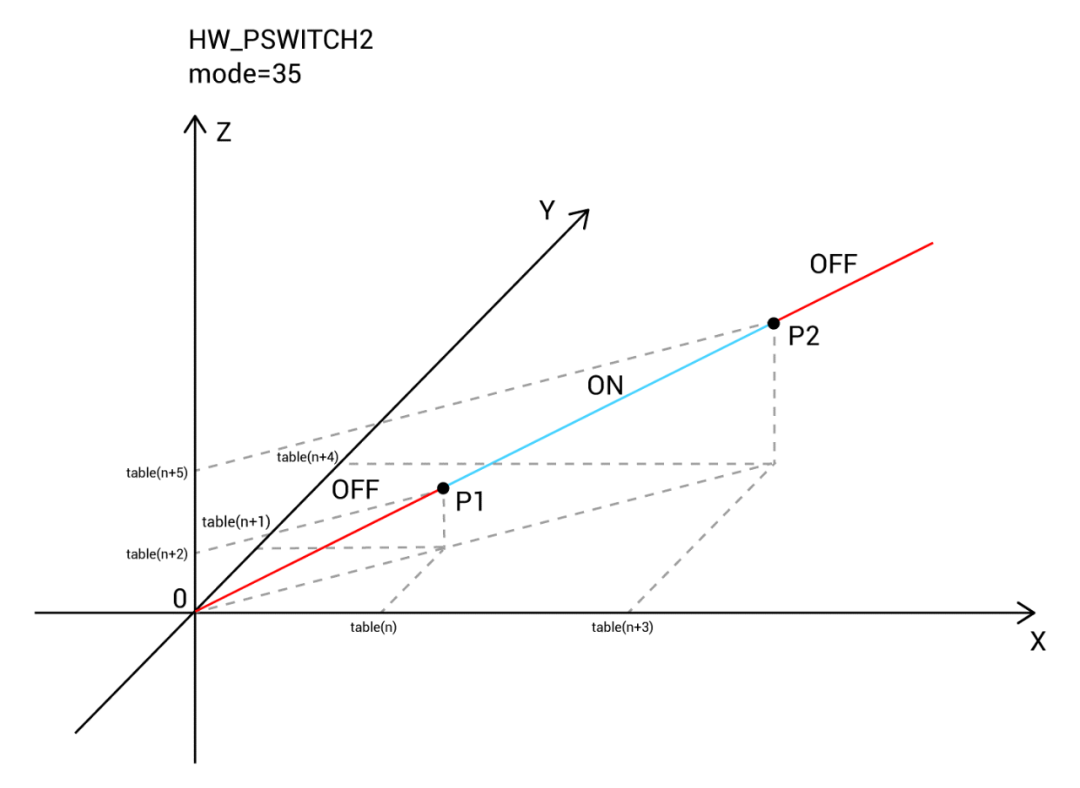
該模式主要功能為,碰到設置好的三維比較點之后,輸出口電平反轉。
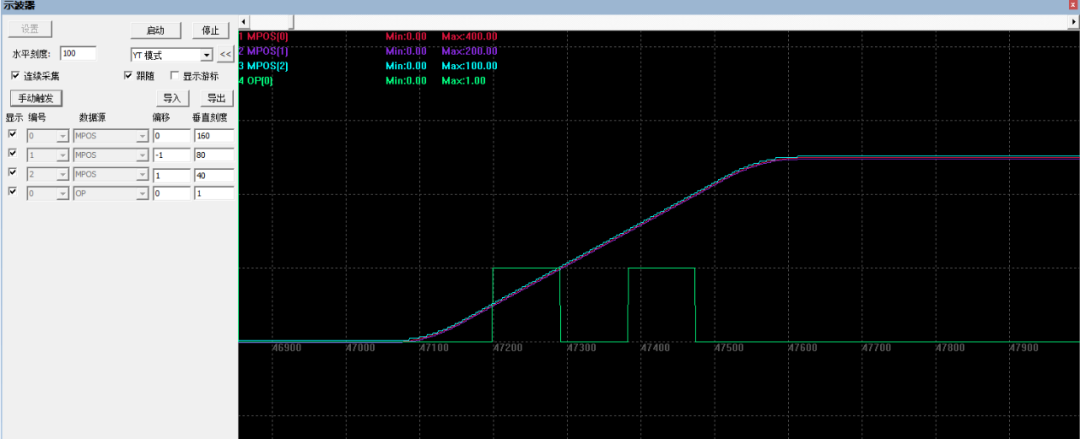
該模式使用時需要指定高速輸出口,將首個比較點的輸出狀態、比較軸設置好之后,再設置比較點(即設置table寄存器,點數量等),設置比較點的脈沖最大誤差等參數后,啟動比較。緊接著驅動軸運動即可。 如下圖所示,設置高速比較輸出口為0,首個比較點的輸出狀態為1,比較軸為0,1,2;設置4個比較點,比較點坐標分別為:(80,40,20),(160,80,40),(240,120,60),(320,160,80)。即當軸運動到點(80,40,20),(160,80,40),(240,120,60),(320,160,80),誤差范圍在±10個脈沖左右的范圍時,都會觸發電平變化。
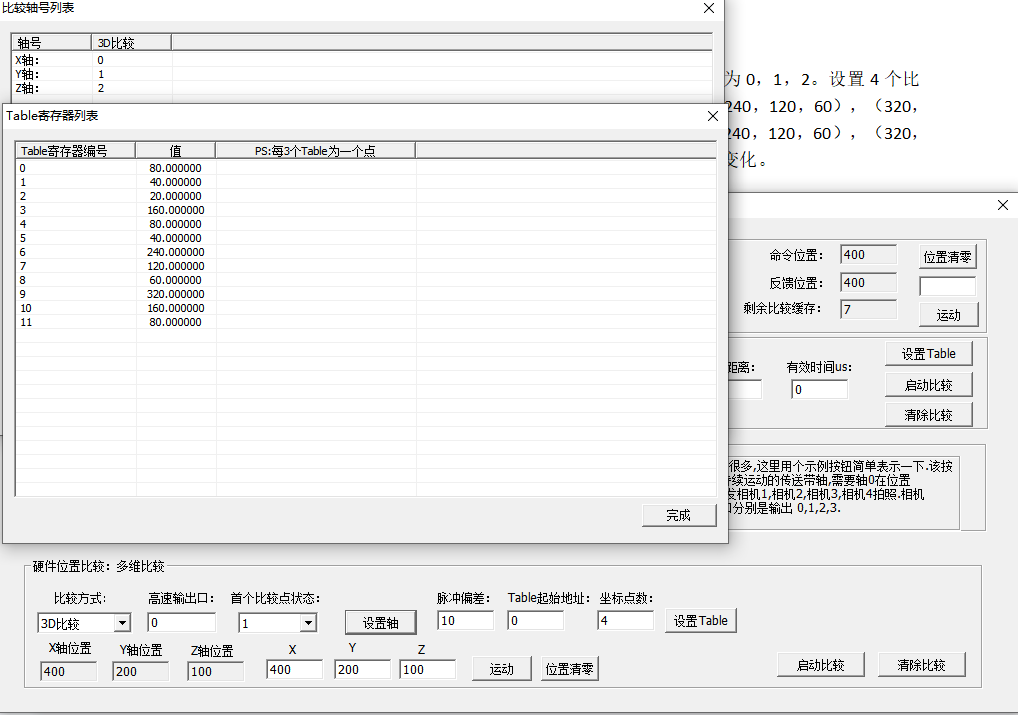
示波器波形如圖所示:在坐標(80,40,20),(160,80,40),(240,120,60),(320,160,80)時會發生電平變化。
核心程序示例:
?
/*參數:mode 25, 26 ,35,36.2D/3D的比較模式 Axisnum:軸數組 Opnum :對應的輸出口 Opstate: 第一個比較點的輸出狀態. maxerr:比較位置每個軸左右的脈沖偏差, 進入偏差范圍后開始比較. num :TABLE 里面存儲的比較點個數. tablepos: 第一個比較點坐標所在 TABLE 編號 與 hwtimer 并用時, 可以動態調整 hwtimer 參數. ModePara1:脈沖時間 ModePara2:脈沖個數 ModePara3:脈沖周期 */ int32 CMyControlDlg:: ZAux_Direct_HwPswitch2_2D(ZMC_HANDLE handle, int *Axisnum,int Mode,int Opnum , int Opstate,int maxerr,int num, int tablepos, float ModePara1, float ModePara2,float ModePara3) { if(0 > Axisnum[0] || Axisnum[0] > MAX_AXIS_AUX) { return ERR_AUX_PARAERR; } char cmdbuff[2048]; char tempbuff[2048]; char cmdbuffAck[2048]; //生成命令 sprintf(cmdbuff, "BASE(%d,%d) ", Axisnum[0], Axisnum[1]); switch(Mode) { case 25: sprintf(tempbuff, "HW_PSWITCH2(%d,%d,%d,%d,%d,%d)", Mode, Opnum, Opstate, maxerr,num,tablepos); strcat(cmdbuff, tempbuff); break; case 26: sprintf(tempbuff, "HW_PSWITCH2(%d,%d,%d,%d,%d,%d,%f,%f,%f)", Mode,Opnum, Opstate, maxerr,num,tablepos,ModePara1,ModePara2,ModePara3); strcat(cmdbuff, tempbuff); break; case 35: sprintf(tempbuff, "HW_PSWITCH2(%d,%d,%d,%d,%d,%d)", Mode, Opnum, Opstate, maxerr,num,tablepos); strcat(cmdbuff, tempbuff); break; case 36: sprintf(tempbuff, "HW_PSWITCH2(%d,%d,%d,%d,%d,%d,%f,%f,%f)", Mode,Opnum, Opstate, maxerr,num,tablepos,ModePara1,ModePara2,ModePara3); strcat(cmdbuff, tempbuff); break; default: return ERR_AUX_PARAERR; break; } //調用命令執行函數 int ret=ZAux_Execute(handle, cmdbuff, cmdbuffAck,2048); if (strlen(cmdbuffAck)!=0) return ERR_ACKERROR; return ret; }
?
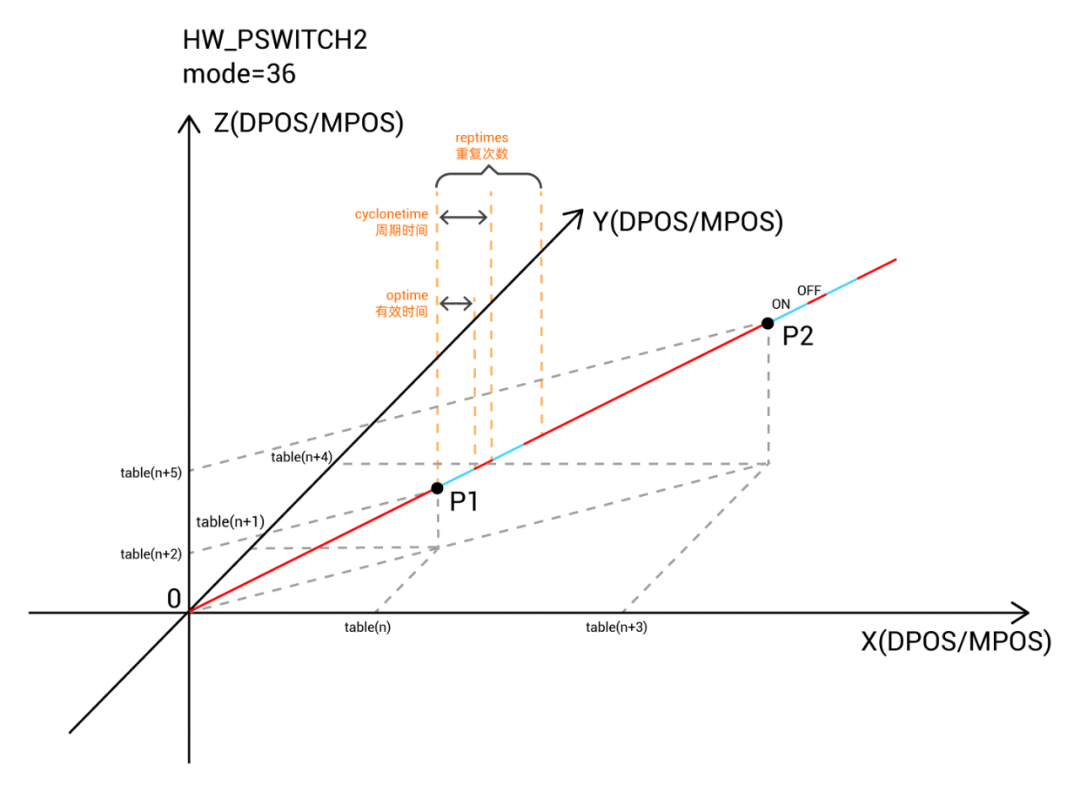
(2)3D比較(模式36)
語法:HW_PSWITCH2(36,opnum,opstate,maxerr,num,tablepos, [ophwtimeus,ophwtimes,hwcyctimeus]) mode 36:三維的比較模式; opnum:對應的輸出口; opstate:第一個比較點的輸出狀態; maxerr:比較位置每個軸左右的脈沖偏差,進入偏差范圍后開始比較,此參數不能寫0; num:table里面存儲的比較點坐標個數; tablepos:第一個比較點坐標所在table編號; * 以下參數和HW_TIMER二選一,HW_TIMER單獨寫可以動態調整參數 * ophwtimeus:脈沖時間; ophwtimes:脈沖個數; hwcyctimeus:脈沖周期。
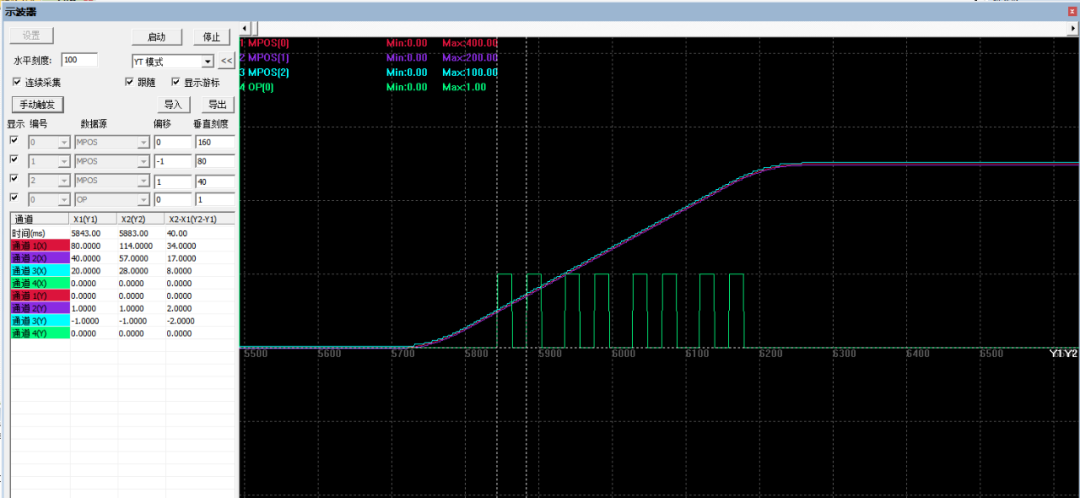
該模式主要功能為,碰到設置好的三維比較點之后,輸出口輸出一斷設置好的定時脈沖。 該模式使用時,需要指定高速輸出口,將首個比較點的輸出狀態、比較軸設置好之后,再設置比較點(即設置table寄存器,點數量等),設置好比較點之后再設置脈沖有效時間,脈沖周期時間,以及脈沖個數(重復次數),設置比較點的脈沖最大誤差等參數后,啟動比較。緊接著驅動軸運動即可。 如下圖所示,設置高速比較輸出口為0,首個比較點的輸出狀態為1,比較軸為0,1,2;設置4個比較點,比較點坐標分別為:(80,40,20),(160,80,40),(240,120,60),(320,160,80)。 即當軸運動到點(80,40,20),(160,80,40),(240,120,60),(320,160,80),誤差范圍在±10個脈沖左右的范圍時,都會觸發電平變化。都會觸發兩個周期為40ms,脈沖有效時間為20ms的脈沖。
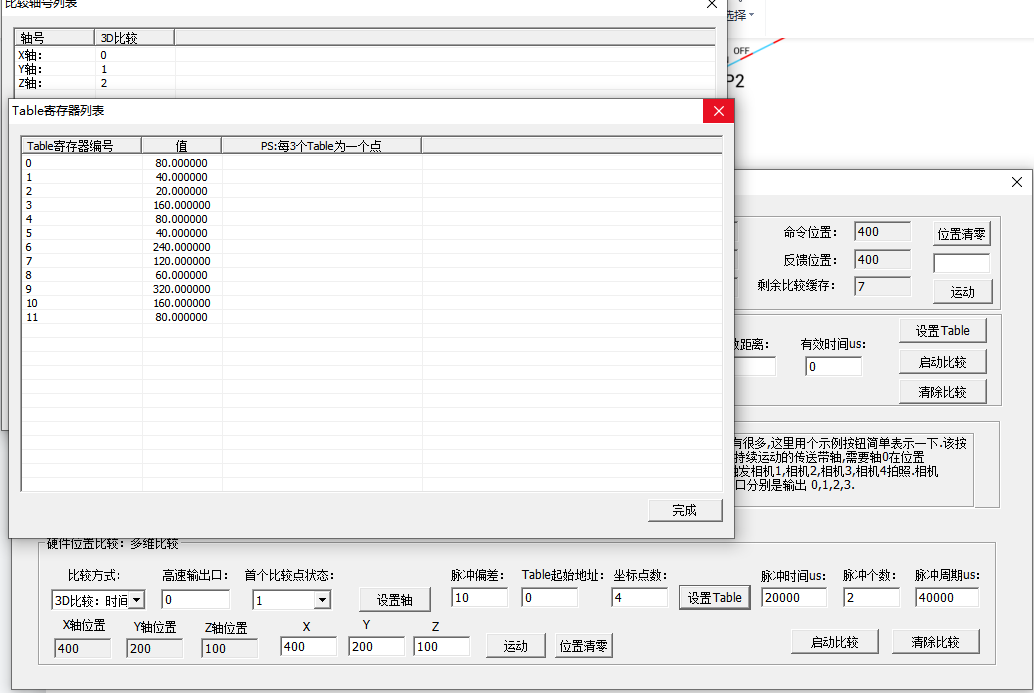
示波器波形如圖所示:在坐標(80,40,20),(160,80,40),(240,120,60),(320,160,80)時會觸發兩個周期為40ms,脈沖有效時間為20ms的脈沖。
核心程序示例:
?
/*參數:mode 25, 26 ,35,36.2D/3D的比較模式
Axisnum:軸數組
Opnum :對應的輸出口
Opstate: 第一個比較點的輸出狀態.
maxerr:比較位置每個軸左右的脈沖偏差, 進入偏差范圍后開始比較.
num:TABLE 里面存儲的比較點個數.
tablepos: 第一個比較點坐標所在 TABLE 編號
與 hwtimer 并用時, 可以動態調整 hwtimer 參數.
ModePara1:脈沖時間
ModePara2:脈沖個數
ModePara3:脈沖周期
*/
int32 CMyControlDlg:: ZAux_Direct_HwPswitch2_2D(ZMC_HANDLE handle, int *Axisnum,int Mode,int Opnum , int Opstate,int maxerr,int num, int tablepos, float ModePara1, float ModePara2,float ModePara3)
{
if(0 > Axisnum[0] || Axisnum[0] > MAX_AXIS_AUX)
{
return ERR_AUX_PARAERR;
}
char cmdbuff[2048];
char tempbuff[2048];
char cmdbuffAck[2048];
//生成命令
sprintf(cmdbuff, "BASE(%d,%d)
", Axisnum[0], Axisnum[1]);
switch(Mode)
{
case 25:
sprintf(tempbuff, "HW_PSWITCH2(%d,%d,%d,%d,%d,%d)", Mode, Opnum, Opstate, maxerr,num,tablepos);
strcat(cmdbuff, tempbuff);
break;
case 26:
sprintf(tempbuff, "HW_PSWITCH2(%d,%d,%d,%d,%d,%d,%f,%f,%f)", Mode,Opnum, Opstate, maxerr,num,tablepos,ModePara1,ModePara2,ModePara3);
strcat(cmdbuff, tempbuff);
break;
case 35:
sprintf(tempbuff, "HW_PSWITCH2(%d,%d,%d,%d,%d,%d)", Mode, Opnum, Opstate, maxerr,num,tablepos);
strcat(cmdbuff, tempbuff);
break;
case 36:
sprintf(tempbuff, "HW_PSWITCH2(%d,%d,%d,%d,%d,%d,%f,%f,%f)", Mode,Opnum, Opstate, maxerr,num,tablepos,ModePara1,ModePara2,ModePara3);
strcat(cmdbuff, tempbuff);
break;
default:
return ERR_AUX_PARAERR;
break;
}
//調用命令執行函數
int ret=ZAux_Execute(handle, cmdbuff, cmdbuffAck,2048);
if (strlen(cmdbuffAck)!=0)
return ERR_ACKERROR;
return ret;
}
?
審核編輯:劉清












 工商網監
工商網監
評論