 電子發燒友App
電子發燒友App


RTOS有臨界區,裸機依然有臨界區。
搞嵌入式玩過 RTOS 的朋友想必都對 OS_ENTER_CRITICAL()、OS_EXIT_CRITICAL() 這個功能代碼對特別眼熟,在 RTOS 里常常會有多任務(進程)處理,有些情況下一些特殊操作(比如 XIP 下 Flash 擦寫、低功耗模式切換)不能被隨意打斷,或者一些共享數據區不能被無序訪問(A 任務正在讀,B 任務卻要寫),這時候就要用到臨界區保護策略了。
所謂臨界區保護策略,簡單說就是系統中硬件臨界資源或者軟件臨界資源,多個任務必須互斥地對它們進行訪問。RTOS 環境下有現成的臨界區保護接口函數,而裸機系統里其實也有這種需求。在裸機系統里,臨界區保護主要就是跟系統全局中斷控制有關。痞子衡之前寫過一篇 《嵌入式MCU中通用的三重中斷控制設計》,文中介紹的第三重也是最頂層的中斷控制是系統全局中斷控制,今天痞子衡就從這個系統全局中斷控制使用入手給大家介紹三種臨界區保護做法:
一、臨界區保護測試場景
關于臨界區保護的測試場景無非兩種。第一種場景是受保護的多個任務間并無關聯,也不會互相嵌套,如下面的代碼所示,task1 和 task2 是按序被保護的,因此 enter_critical() 和 exit_critical() 這兩個臨界區保護函數總是嚴格地成對執行:
?
void?critical_section_test(void)
{
????//?進入臨界區
????enter_critical();
????//?做受保護的任務1
????do_task1();
????//?退出臨界區
????exit_critical();
????//?進入臨界區
????enter_critical();
????//?做受保護的任務2,與任務1無關聯
????do_task2();
????//?退出臨界區
????exit_critical();
}
?
第二種場景就是多個任務間可能有關聯,會存在嵌套情況,如下面的代碼所示,task2 是 task1 的一個子任務,這種情況下,你會發現實際上是先執行兩次 enter_critical(),然后再執行兩次 exit_critical()。需要注意的是 task1 里面的子任務 task3 雖然沒有像子任務 task2 那樣被主動加一層保護,但由于主任務 task1 整體是受保護的,因此子任務 task3 也應該是受保護的。
?
void?do_task1(void)
{
????//?進入臨界區
????enter_critical();
????//?做受保護的任務2,是任務1中的子任務
????do_task2();
????//?退出臨界區
????exit_critical();?
????//?做任務3
????do_task3();
}
void?critical_section_test(void)
{
????//?進入臨界區
????enter_critical();
????//?做受保護的任務1
????do_task1();
????//?退出臨界區
????exit_critical();
}
?
二、臨界區保護三種實現
上面的臨界區保護測試場景很清楚了,現在到 enter_critical()、exit_critical() 這對臨界區保護函數的實現環節了:
2.1 入門做法
首先是非常入門的做法,直接就是對系統全局中斷控制函數 __disable_irq()、__enable_irq() 的封裝。回到上一節的測試場景里,這種實現可以很好地應對非嵌套型任務的保護,但是對于互相嵌套的任務保護就失效了。上一節測試代碼里,task3 應該也要受到保護的,但實際上并沒有被保護,因為緊接著 task2 后面的 exit_critical() 直接就打開了系統全局中斷。
?
void?enter_critical(void)
{
????//?關閉系統全局中斷
????__disable_irq();
}
void?exit_critical(void)
{
????//?打開系統全局中斷
????__enable_irq();
}
?
2.2 改進做法
針對入門做法,可不可以改進呢?當然可以,我們只需要加一個全局變量 s_lockObject 來實時記錄當前已進入的臨界區保護的次數,即如下代碼所示。每調用一次 enter_critical() 都會直接關閉系統全局中斷(保證臨界區一定是受保護的),并記錄次數,而調用 exit_critical() 時僅當當前次數是 1 時(即當前不是臨界區保護嵌套情況),才會打開系統全局中斷,否則只是抵消一次進入臨界區次數而已。改進后的實現顯然可以保護上一節測試代碼里的 task3 了。
?
static?uint32_t?s_lockObject; void?init_critical(void) { ????__disable_irq(); ????//?清零計數器 ????s_lockObject?=?0; ????__enable_irq(); } void?enter_critical(void) { ????//?關閉系統全局中斷 ????__disable_irq(); ????//?計數器加?1 ????++s_lockObject; } void?exit_critical(void) { ????if?(s_lockObject?<=?1) ????{ ????????//?僅當計數器不大于?1?時,才打開系統全局中斷,并清零計數器 ????????s_lockObject?=?0; ????????__enable_irq(); ????} ????else ????{ ????????//?當計數器大于?1?時,直接計數器減?1?即可 ????????--s_lockObject; ????} }
?
2.3 終極做法
上面的改進做法雖然解決了臨界區任務嵌套保護的問題,但是增加了一個全局變量和一個初始化函數,實現不夠優雅,并且嵌入式系統里全局變量極容易被篡改,存在一定風險,有沒有更好的實現呢?當然有,這要借助 Cortex-M 處理器內核的特殊屏蔽寄存器 PRIMASK,下面是 PRIMASK 寄存器位定義(取自 ARMv7-M 手冊),其僅有最低位 PM 是有效的,當 PRIMASK[PM] 為 1 時,系統全局中斷是關閉的(將執行優先級提高到 0x0/0x80);當 PRIMASK[PM] 為 0 時,系統全局中斷是打開的(對執行優先級無影響)。
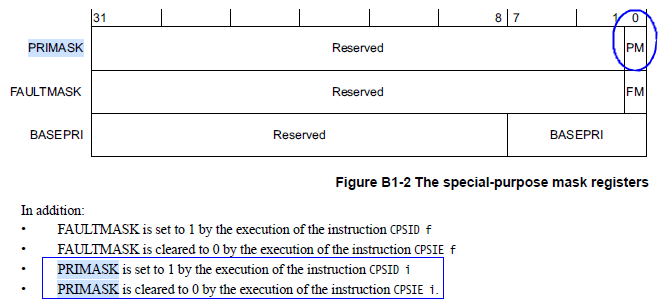
看到這,你應該明白了 __disable_irq()、__enable_irq() 功能其實就是操作 PRIMASK 寄存器實現的。既然 PRIMASK 寄存器控制也保存了系統全局中斷的開關狀態,我們可以通過獲取 PRIMASK 值來替代上面改進做法里的全局變量 s_lockObject 的功能,代碼實現如下:
?
uint32_t?enter_critical(void)
{
????//?保存當前?PRIMASK?值
????uint32_t?regPrimask?=?__get_PRIMASK();
????//?關閉系統全局中斷(其實就是將?PRIMASK?設為?1)
????__disable_irq();
????return?regPrimask;
}
void?exit_critical(uint32_t?primask)
{
????//?恢復?PRIMASK
????__set_PRIMASK(primask);
}
?
因為 enter_critical()、exit_critical() 函數原型有所變化,因此使用上也要相應改變下:
?
void?critical_section_test(void)
{
????//?進入臨界區
????uint32_t?primask?=?enter_critical();
????//?做受保護的任務
????do_task();
????//?退出臨界區
????exit_critical(primask);
????//?...
}
?
附錄、PRIMASK寄存器設置函數在各 IDE 下實現
?
//////////////////////////////////////////////////////
//?IAR?環境下實現(見?cmsis_iccarm.h?文件)
#define?__set_PRIMASK(VALUE)????????(__arm_wsr("PRIMASK",?(VALUE)))
#define?__get_PRIMASK()?????????????(__arm_rsr("PRIMASK"))
//////////////////////////////////////////////////////
//?Keil?環境下實現(見?cmsis_armclang.h?文件)
__STATIC_FORCEINLINE?void?__set_PRIMASK(uint32_t?priMask)
{
??__ASM?volatile?("MSR?primask,?%0"?:?:?"r"?(priMask)?:?"memory");
}
__STATIC_FORCEINLINE?uint32_t?__get_PRIMASK(void)
{
??uint32_t?result;
??__ASM?volatile?("MRS?%0,?primask"?:?"=r"?(result)?);
??return(result);
}
?
分享完畢,希望對你有所幫助。
審核編輯:劉清











 工商網監
工商網監
評論