 電子發(fā)燒友App
電子發(fā)燒友App


基于DSP的新型無分電器點火裝置
一種基于DSP的新型汽車無分電器點火裝置。在該裝置中,DSP用于點火控制和與PC機進行通信,Intel 8751單片機用于系統(tǒng)實時監(jiān)控和備用點火。該裝置的特點是:點火正時特性好,控制靈活性強,能適應(yīng)發(fā)動機各種工況并具備自診斷功能,能與PC機進行通信并進行程序和數(shù)據(jù)更新。
?? 關(guān)鍵詞:DSP 電子點火 無分電器點火裝置 點火提前角
隨著電子技術(shù)的迅猛發(fā)展和綠色環(huán)保的要求,人們對汽車發(fā)動機點火系統(tǒng)性能的求越來越高,不僅要求實時性強、點火正時特性好、抗干擾能力強,而且要求集成較高、減少故障點、具有自診斷和備用點火功能,同時還要求與PC機通訊并能進行系統(tǒng)軟件升級、重要數(shù)據(jù)更新和在線系統(tǒng)仿真。下面介紹一種基于DSP的新型汽車無分電器點火裝置。
1 系統(tǒng)構(gòu)成
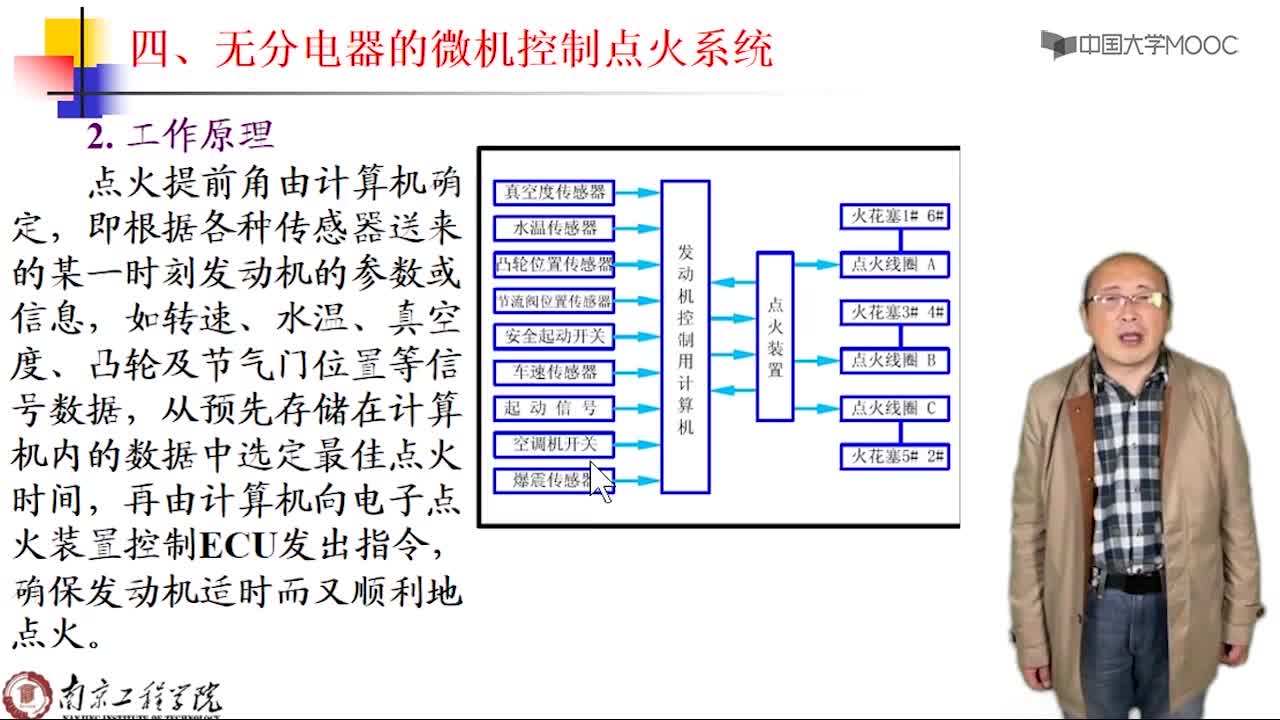
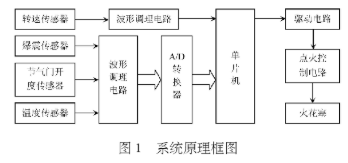
系統(tǒng)中央處理單元ECU由一片DSP和一片通用單片機組成。DSP主要用于對信號的采集、處理,控制算法實現(xiàn),與輔助單元和PC機進行通訊;單片機主要用于系統(tǒng)監(jiān)測和備用點火等。系統(tǒng)結(jié)構(gòu)框圖如圖1所示。
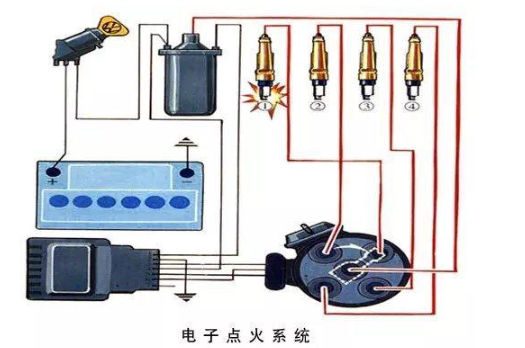
??? 系統(tǒng)采用了集成點火組件。點火組件用于完成閉合角控制、恒電流控制、過電壓保護、停車斷電保護等功能,并能通過缸序判別信號IGda、IGdb把點水信號Igt關(guān)入相應(yīng)的點火驅(qū)動電路,產(chǎn)生點火確認(rèn)信號IGf。
1.1 主CPU單元
系統(tǒng)主CPU采用DSP TMS320F240。它具有以下特點:32位中央算術(shù)邏輯單元CALU;16位×16位并行硬件乘法器;內(nèi)置544字×16位雙端口數(shù)據(jù)/程序RAM,16K字×16位FLASH E2PROM;軟件等待發(fā)生器的外部存儲器接口模塊,支持硬件等待狀態(tài);雙10位高速A/D轉(zhuǎn)換器;28個獨立可編程的多路復(fù)用I/O引腳;基于鎖相環(huán)的時鐘模塊;帶實時中斷的看門狗定時器模塊;串行通訊接口;4級管道操作;8級硬件堆棧;6個外部中斷;靜態(tài)CMOS技術(shù);4種低電源模式;最高頻率為40MHz;多數(shù)指令周期為單周期;完成一次點火提前角的計算時間限于1ms,比通用微處理機快10~100倍,大大地提高了點火系統(tǒng)的實時性。
主CPU單元主要完成兩大任務(wù):一是確定當(dāng)前工況下的最佳點火提前角,產(chǎn)生點火控制信號IGt和汽缸判定信號IGda與IGdb;二是通過RS-232接口與PC機進行串行通信,主CPU可把采集的各種傳感器的信號、發(fā)動機轉(zhuǎn)速信號、故障代碼等送到PC機中進行仿真與分析;PC機也可以把二進制程序代碼及一些重要數(shù)據(jù)(如不同工況下的修正值等)送到主CPU的FLASH E2PROM單元。
TMS320F240擴展了四片CY7C169-25和一片8253,并采用74F148擴展外部中斷源輸入端。
1.2 監(jiān)測和點火備用模塊
監(jiān)測和點火備用模塊所使用的CPU是8751。該模塊通過對各傳感器信號、IGf信號等進行分析、診斷,對主CPU單元實施監(jiān)測。當(dāng)主CPU單元出現(xiàn)故障時,監(jiān)測和點火備用模塊立即接過點火控制權(quán),并放棄監(jiān)測工作。
8751單元擴展了2732、6264和8253各一片。采用一片AD574A和CD4051進行A/D轉(zhuǎn)換,并用74LS148擴展了8個外部中斷源輸入端。
1.3 DSP數(shù)字控制器與PC機的串行通訊
TMS320F240 SCI模塊支持CPU與使用標(biāo)準(zhǔn)NRZ格式的其它異步外設(shè)之間進行數(shù)字通信。SCI接收器和發(fā)送器是雙緩沖的,具有獨立的使能和中斷時。SCI對接收的數(shù)據(jù)進行間斷、奇偶性、超時、幀出錯等檢測。系統(tǒng)采用了RS-232異步串行通訊標(biāo)準(zhǔn)總線。
1.4 系統(tǒng)接口資源的分配
TMS320F240 DSP數(shù)字控制器與8751單片機提供的I/O接口與中斷輸入接口是有限的,為避免資源沖突,將外部的輸入信號按表1進行優(yōu)化分配。
表1 外部輸入信號優(yōu)化分配
| IDL信號 | 空調(diào)開關(guān) | G1 | G2 | Ne | 負(fù)荷 | 水溫 | |
| TMS320F240 MCS-8751 |
I/OPB2 P1.0 |
I/OPB3 P1.1 |
XINT2 INT1 |
XINT2 INT1 |
CAP1 T0+INT0 |
ADCIN3 A/D |
ADCIN2 A/D |
| 顯示開關(guān)信號 | R-P | 起動信號 | IGf | IGt | IGda | IGdb | |
| TMS320F240 MCS-8751 |
XINT2 INT1 |
I/OPB4 P1.2 |
XINT2 INT1 |
GAP2 T1 |
IOPB7 P1.4 |
IOPB5 P1.5 |
IOPB4 P1.6 |
2 系統(tǒng)軟件
2.1 點火提前角
點火提前角對發(fā)動機的工作性能影響較大,ECU按下式計算點火提前角:
實際點火提前角=初始點火提前角+基本點火提前角+修正點提前角
基本點火提前角數(shù)據(jù)以表格的形式存儲在DSP的FLASH E2PROM中。實際上,基本點火提前角數(shù)據(jù)遠不止256個。如果發(fā)動機轉(zhuǎn)速與負(fù)荷不在基本點火提前角對應(yīng)的點上,則采用多元線性回歸法進行擬合:
式中,θ――基本點火提前角
n――發(fā)動機轉(zhuǎn)速
l――發(fā)動機負(fù)荷
將離線生成的線性回歸方程系數(shù)存儲在ECU中。ECU根據(jù)轉(zhuǎn)速和負(fù)荷信息,查閱基本點火提前角數(shù)據(jù)表,或查閱線性回歸方程系數(shù)表計算基本點火提前角,并根據(jù)影響點火提前角其它因素(冷卻水溫信號、空調(diào)開關(guān)信號、怠速開關(guān)信號等)進行必要的修正后輸出點火控制信號IGt。
不同型號的發(fā)動機,其點火提前角與線性回歸方程式系數(shù)不同。系統(tǒng)ECU與PC機的通信功能提供了隨時新這些數(shù)據(jù)的方便。
2.2 系統(tǒng)軟件模塊
軟件系統(tǒng)由主程序模塊、控制算法模塊、發(fā)動機轉(zhuǎn)速測量及處理模塊、A/D轉(zhuǎn)換模塊、G1和G2信號中斷模塊、DSP數(shù)字控制器與微機的通訊模塊、DSP數(shù)字控制器在線程序更新模塊、系統(tǒng)監(jiān)測模塊、備用點火模塊、FLASH EEROM擦除模塊等組成。
??? 主程序模塊主要包括初始化程序、起動程序、發(fā)動機工況測量程序、處理程序、判別程序等。程序的初始化包括RAM區(qū)、各特殊功能寄存器、I/O、堆棧等的初始化。主程序模塊根據(jù)發(fā)動機轉(zhuǎn)速、負(fù)荷等信號確定發(fā)動機的運行工況,并由此轉(zhuǎn)入相應(yīng)的處理程序當(dāng)中。
發(fā)動機轉(zhuǎn)速測量及處理模塊主要完成發(fā)動機工況判定、查點火提前角數(shù)據(jù)表等;A/D轉(zhuǎn)換模塊處理冷卻水濕和負(fù)荷傳感器等模擬信號的轉(zhuǎn)換;控制算法模塊根據(jù)存儲的不同燃油標(biāo)號的點火提前數(shù)據(jù)、多元線性回歸系統(tǒng)等表格,確定基本點火提前數(shù)據(jù)以及發(fā)動機爆震控制等;G1和G2信號中斷子程序主要控制IGt、IGda、IGdb信號的產(chǎn)生,檢測點火確認(rèn)信號IGf;DSP數(shù)字控制器與微機的通訊模塊完成DSP數(shù)字控制器與單片機的信息交換;系統(tǒng)檢測、備用模塊主要完成對一些傳感器的檢測、ECU單元的監(jiān)控、備用狀態(tài)下的點火控制;系統(tǒng)監(jiān)測和備用點火模塊對G1、G2、Ne、IGf、負(fù)荷、水溫等信號進行監(jiān)控,當(dāng)出現(xiàn)故障時,置標(biāo)志位、報警。當(dāng)主CPU出現(xiàn)故障時,除了報警之外,該模塊立即接過點火控制權(quán)。
系統(tǒng)的操作流程圖如圖2所示。
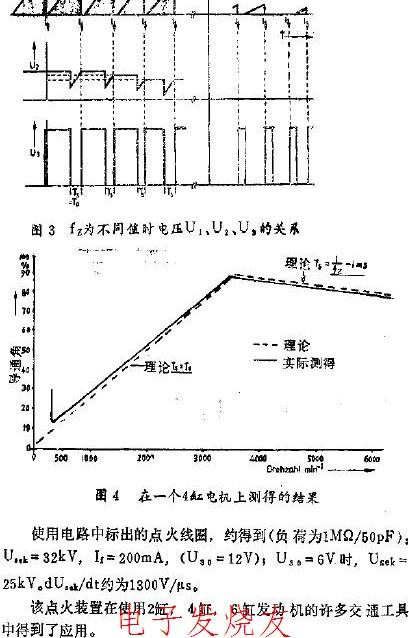
本點火系統(tǒng)的新穎之處在于ECU使用了兩個CPU,使其具有了自檢功能和備用功能。主CPU采用了被視為未來通用芯片的DSP,這類芯片具有處理速度快、運算功能強、輸入輸出速度快、精度高、可靠性好等特點,適用于實時控制系統(tǒng)。該系統(tǒng)已在汽車發(fā)動機上試運行,得到了良好的發(fā)動機點火性能。















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論