 電子發燒友App
電子發燒友App


近年來,由于神經網絡的研究取得了長足的進展,基于BP神經網絡模型的速度辨識方法得到了廣泛研究,但其仍存在收斂速度慢、易陷入局部極小值等問題,因此,對神經網絡的優化一直是當前的研究熱點。本文將混沌引入到蟻群算法(Ant Colony Optimization,ACO)當中,以形成混沌蟻群算法(Chaos Ant Colony Optimization,CACO),從而提高了對于BP神經網絡的優化效率和精度,解決了上述問題;同時,也在對異步電機直接轉矩控制(DTC)轉速辨識的仿真試驗中,實現了對電機轉速的準確辨識。
1 BP神經網絡的缺點
BP神經網絡是目前控制領域中應用廣泛的一種神經網絡模型,其學習過程由信息前向計算和誤差反向傳播過程組成。它采用梯度搜索技術,可使網絡的實際輸出值與期望輸出值的誤差均方值最小化。此外,該網絡還具有良好的非線性映射和泛化能力。BP神經網絡的結構如圖1所示。

BP神經網絡的數學模型為:

其中,xj為輸入層節點輸出,yi為隱含層節點輸出,O1為輸出層輸出。輸入層節點與隱含層節點間的網絡連接權值為ωij;隱含層節點與輸出層節點間的網絡連接權值為Tli;輸出層節點l的期望輸出為t1。f(net)為傳遞函數。為此,其網絡連接權值的調整公式如下:

其中,η為學習速率(η>0);k為訓練次數,α為平滑因子(0<α<1),為隱層節點誤差。
2 BP神經網絡的混沌蟻群優化過程
2.1?基本蟻群算法
ACO的基本思路是:在算法的初始時刻,將一定數量的螞蟻隨機放在給定的N座城市上,并設此時各路徑上的信息素相等。螞蟻在運動過程中根據各條路徑上的信息素量獨立選擇下一城市。螞蟻系統使用的轉移規則是根據螞蟻在兩個城市之間的轉移概率來進行路徑選擇。在完成一次循環后,螞蟻在路徑上釋放一定量的信息素。完成一次循環所走過的路徑就是問題的一個解,當所有螞蟻都完成循環后,即可得到最優解。
蟻群算法的基本公式如下:

2.2?混沌蟻群算法
混沌蟻群算法(CACO)是受到自然界螞蟻走行的混沌特點和整個種群的自組織特點的啟發。它利用混沌的遍歷性和隨機性等特點來將混沌擾動算子引入蟻群算法,并將帶有混沌特征的初始化變量線性映射到變量取值區間。該方法兼顧了混沌動態搜索和智能搜索的特點,可有效地避免搜索過程中陷入局部最優,從而達到提高算法速度和全局尋優的能力。
(1)混沌初始化
設τij(t)為t時刻路徑上的信息濃度,利用混沌運動的遍歷性進行混沌初始化。混沌變量選擇典型的混沌系統Logistic映射迭代公式如下:

式中,μ為控制參數,當μ=4時,Logistic完全處于混沌狀態,此時系統在[0,1]之間具有遍歷性。如果利用全排列理論將每個混沌變量對應于一條路徑,也就是為每條路段上的信息素濃度根據混沌量給定初始值τij(0),就可以有效地解決基本蟻群算法收斂速度慢的問題。
(2)引入混沌擾動量
在蟻群算法中,如果螞蟻后從點i至某一點j,則在路徑ij上留下信息素τij(t)。螞蟻k在走完任意一路徑以后,將按式(5)更新該路徑上的信息素。可以看出,此更新方法在加快尋優的同時,卻容易陷入局部最優解。因此,在此處引入混沌擾動量來調整信息素,以使其避免陷入局部最優極值區間。改進后的式子為:

其中,Xij為混沌擾動量,可采用典型混沌系統Logistic映射得到,q為相關系數。
2.3? 混沌蟻群算法的實現步驟
實現混沌蟻群算法的具體步驟如下:
Step1:初始化BP網絡結構,設定網絡的輸入層、隱含層、輸出層的神經元個數;
Step2:混沌初始化信息素濃度、個體最優和全局最優;
Step3:用公式(4)計算每只螞蟻的轉移概率;
Step4:根據每只螞蟻的轉移概率得出本次最優路徑并最優值比較,若更優,則更新最優值;
Step5:將每只螞蟻的最優值與整個蟻群的最優值相比較,若更優,則其將成為整個蟻群新的最優值;
Step6:更新并按公式(9)修改路徑ij上的信息素濃度;
Step7:比較次數是否達到預設的精度,若滿足預設精度,則最后一次迭代的全局最優值中每一維的權值和閾值就是所求的;否則返回step3,算法繼續迭代,直至滿足條件為止。
3?基于DTC的系統仿真
3.1?直接轉矩控制系統結構
直接轉矩控制(DTC)系統的結構原理如圖2所示。在α-β坐標系下,通過獲得定子電壓Usα、Usβ,定子電流Isα、Isβ及定子電流導數pIsα、pIsβ歸一化后,即可構成神經網絡的六個輸入,再經過反歸一化,即可得到轉子轉速ω,從而構建一個動態轉速估計器。
3.2?仿真實驗
在MATLAB/Simulink仿真環境下建立直接轉矩控制系統的仿真平臺時,系統采樣周期可設定為0.1 ms,異步感應電動機的其它各參數為:額定功率PN=15 kW,額定電壓VN=380 V,額定頻率fN=50 Hz,定子電阻Rs=0.435 Ω,轉子電阻Rr=0.816 Ω,定子電感Ls=0.002H,轉子電感Lr=0.002H,定轉子互感Lm=0.06931H,極對數p=2,轉動慣量J=0.0918 kg.m2。設定電機轉速ω=20 rad/s時,采取1000組數據作為訓練樣本,5000組數據作為驗證樣本,最大訓練次數設定為2000次,最小容許誤差設定為0.001。
學習網絡的隱含層節點個數經多次訓練后確定為k1=11和k2=6,設n為輸入節點個數。混沌變量個數m為神經網絡所有權值、閾值的總和,m=156,蟻群種群數M=30,p=0.8,Q=50。其算法訓練誤差比較如表1所列。

從表1可以看出,傳統的BP算法優化神經網絡的最小適應度收斂十分緩慢,并且誤差較大。而混沌蟻群算法優化BP神經網絡誤差更小,精度更高,其收斂性要遠遠優于傳統的BP算法。
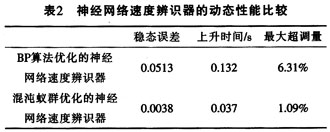
表2所列是由實驗仿真結果中分別提取出的神經網絡速度辨識器的動態性能指標。可以看出,混沌蟻群優化的神經網絡較之傳統BP算法的動態性能有了很大改進。
4 結束語
本文構造了一種基于混沌蟻群算法的BP神經網絡模型,并將其應用到直接轉矩控制系統中的轉速辨識器中,從而顯示出其辨識非線性函數的優越性能以及速度快、精度高的特點。仿真結果表明,用混沌蟻群優化的BP神經網絡速度辨識器是可行的,而且具有較強的速度跟蹤精度,可實現直接轉矩控制系統的無速度傳感器控制,而且系統具有良好的動、靜態性能。
1 BP神經網絡的缺點
BP神經網絡是目前控制領域中應用廣泛的一種神經網絡模型,其學習過程由信息前向計算和誤差反向傳播過程組成。它采用梯度搜索技術,可使網絡的實際輸出值與期望輸出值的誤差均方值最小化。此外,該網絡還具有良好的非線性映射和泛化能力。BP神經網絡的結構如圖1所示。
BP神經網絡的數學模型為:
其中,xj為輸入層節點輸出,yi為隱含層節點輸出,O1為輸出層輸出。輸入層節點與隱含層節點間的網絡連接權值為ωij;隱含層節點與輸出層節點間的網絡連接權值為Tli;輸出層節點l的期望輸出為t1。f(net)為傳遞函數。為此,其網絡連接權值的調整公式如下:
其中,η為學習速率(η>0);k為訓練次數,α為平滑因子(0<α<1),為隱層節點誤差。
2 BP神經網絡的混沌蟻群優化過程
2.1?基本蟻群算法
ACO的基本思路是:在算法的初始時刻,將一定數量的螞蟻隨機放在給定的N座城市上,并設此時各路徑上的信息素相等。螞蟻在運動過程中根據各條路徑上的信息素量獨立選擇下一城市。螞蟻系統使用的轉移規則是根據螞蟻在兩個城市之間的轉移概率來進行路徑選擇。在完成一次循環后,螞蟻在路徑上釋放一定量的信息素。完成一次循環所走過的路徑就是問題的一個解,當所有螞蟻都完成循環后,即可得到最優解。
蟻群算法的基本公式如下:
2.2?混沌蟻群算法
混沌蟻群算法(CACO)是受到自然界螞蟻走行的混沌特點和整個種群的自組織特點的啟發。它利用混沌的遍歷性和隨機性等特點來將混沌擾動算子引入蟻群算法,并將帶有混沌特征的初始化變量線性映射到變量取值區間。該方法兼顧了混沌動態搜索和智能搜索的特點,可有效地避免搜索過程中陷入局部最優,從而達到提高算法速度和全局尋優的能力。
(1)混沌初始化
設τij(t)為t時刻路徑上的信息濃度,利用混沌運動的遍歷性進行混沌初始化。混沌變量選擇典型的混沌系統Logistic映射迭代公式如下:
式中,μ為控制參數,當μ=4時,Logistic完全處于混沌狀態,此時系統在[0,1]之間具有遍歷性。如果利用全排列理論將每個混沌變量對應于一條路徑,也就是為每條路段上的信息素濃度根據混沌量給定初始值τij(0),就可以有效地解決基本蟻群算法收斂速度慢的問題。
(2)引入混沌擾動量
在蟻群算法中,如果螞蟻后從點i至某一點j,則在路徑ij上留下信息素τij(t)。螞蟻k在走完任意一路徑以后,將按式(5)更新該路徑上的信息素。可以看出,此更新方法在加快尋優的同時,卻容易陷入局部最優解。因此,在此處引入混沌擾動量來調整信息素,以使其避免陷入局部最優極值區間。改進后的式子為:
其中,Xij為混沌擾動量,可采用典型混沌系統Logistic映射得到,q為相關系數。
2.3? 混沌蟻群算法的實現步驟
實現混沌蟻群算法的具體步驟如下:
Step1:初始化BP網絡結構,設定網絡的輸入層、隱含層、輸出層的神經元個數;
Step2:混沌初始化信息素濃度、個體最優和全局最優;
Step3:用公式(4)計算每只螞蟻的轉移概率;
Step4:根據每只螞蟻的轉移概率得出本次最優路徑并最優值比較,若更優,則更新最優值;
Step5:將每只螞蟻的最優值與整個蟻群的最優值相比較,若更優,則其將成為整個蟻群新的最優值;
Step6:更新并按公式(9)修改路徑ij上的信息素濃度;
Step7:比較次數是否達到預設的精度,若滿足預設精度,則最后一次迭代的全局最優值中每一維的權值和閾值就是所求的;否則返回step3,算法繼續迭代,直至滿足條件為止。
3?基于DTC的系統仿真
3.1?直接轉矩控制系統結構
直接轉矩控制(DTC)系統的結構原理如圖2所示。在α-β坐標系下,通過獲得定子電壓Usα、Usβ,定子電流Isα、Isβ及定子電流導數pIsα、pIsβ歸一化后,即可構成神經網絡的六個輸入,再經過反歸一化,即可得到轉子轉速ω,從而構建一個動態轉速估計器。
3.2?仿真實驗
在MATLAB/Simulink仿真環境下建立直接轉矩控制系統的仿真平臺時,系統采樣周期可設定為0.1 ms,異步感應電動機的其它各參數為:額定功率PN=15 kW,額定電壓VN=380 V,額定頻率fN=50 Hz,定子電阻Rs=0.435 Ω,轉子電阻Rr=0.816 Ω,定子電感Ls=0.002H,轉子電感Lr=0.002H,定轉子互感Lm=0.06931H,極對數p=2,轉動慣量J=0.0918 kg.m2。設定電機轉速ω=20 rad/s時,采取1000組數據作為訓練樣本,5000組數據作為驗證樣本,最大訓練次數設定為2000次,最小容許誤差設定為0.001。
學習網絡的隱含層節點個數經多次訓練后確定為k1=11和k2=6,設n為輸入節點個數。混沌變量個數m為神經網絡所有權值、閾值的總和,m=156,蟻群種群數M=30,p=0.8,Q=50。其算法訓練誤差比較如表1所列。
從表1可以看出,傳統的BP算法優化神經網絡的最小適應度收斂十分緩慢,并且誤差較大。而混沌蟻群算法優化BP神經網絡誤差更小,精度更高,其收斂性要遠遠優于傳統的BP算法。
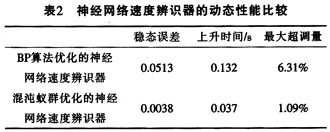
表2所列是由實驗仿真結果中分別提取出的神經網絡速度辨識器的動態性能指標。可以看出,混沌蟻群優化的神經網絡較之傳統BP算法的動態性能有了很大改進。
4 結束語
本文構造了一種基于混沌蟻群算法的BP神經網絡模型,并將其應用到直接轉矩控制系統中的轉速辨識器中,從而顯示出其辨識非線性函數的優越性能以及速度快、精度高的特點。仿真結果表明,用混沌蟻群優化的BP神經網絡速度辨識器是可行的,而且具有較強的速度跟蹤精度,可實現直接轉矩控制系統的無速度傳感器控制,而且系統具有良好的動、靜態性能。









 工商網監
工商網監
評論