 電子發燒友App
電子發燒友App


引言
漢字NAVTEX 接收機是一個調諧在490/518kHz的能夠自動接收并打印漢字P英文兩種形式的航行警告、氣象信息和緊急信息的裝置。它是海上人命安全公約規定的船舶必須裝備的一種無線電設備。當前的NAVTEX 系統接收功能主要是由模擬器件組成的硬件電路來完成,而且接收機受體積所限,濾波器很少,其抗干擾分辨性能相當有限,對工作頻帶內的窄帶干擾無能為力,模擬電路異常的復雜,難以實現提高設備的性能和增強設備的功能。在這里提出基于DSP 的新型NAVTEX 接收機的設計。采用DSP 技術和軟件無線電技術,實現數字濾波解調與自檢等功能,方便地提高了設備的性能和增強了設備的功能,并詳細進行了算法研究和DSP 實現及實驗結果。
信號特點
NAVTEX系統通信線路所使用的頻段有中波(518kHz 和490kHz) 或中短波(4 209. 5kHz) 。它先是進行2FSK把數據信號變成音頻信號,其中心頻率為117kHz ,當輸入數據為高電平時,2FSK信號的頻率為1. 615kHz ,反之,2FSK信號的頻率為1. 785kHz。然后用這個音頻信號去調制490kHz (或者其他頻率) 的射頻,通過無線信道傳輸到接收端。信息在傳輸過程中,一方面受到信道衰落的影響,另一方面受到噪聲的干擾。通信性能的優劣很大程度上取決于接收機的性能,而信道特性不理想及信道中噪聲的存在很大程度上直接作用于接收端。
接收機工作原理
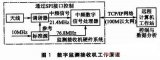
漢字NAVTEX 接收機包括接收天線、射頻接收單元、信息處理單元、打印單元、顯示單元、電源這幾部分,它的原理框圖如圖1 所示。

信號經天線接收以后送到射頻接收單元,在射頻接收單元完成信號的解調。解調后的數字信號送入信息處理單元。在信息處理單元里完成糾錯編碼、譯碼等功能。然后由打印單元打印出來。操作過程的響應由顯示單元來實現。
新型NAVTEX 系統接收機的設計
本設計主要改進了接收機的射頻接收單元,使其數字化,使電路簡單,能夠方便的提高設備性能和完善設備的功能。當前使用的NAVTEX 接收機的模擬電路異常復雜,要達到需要的精度使接收機占用的體積過大,并且對性能的提高和增加新的功能難以實現。本設計使NAVTEX 接收機小型化、模塊化、數字化和軟件化。
硬件設計:
當傳輸漢字的NAVTEX 信息的時候一般在490kHz 或4 209. 5kHz 的頻率上傳輸, 而英文的NAVTEX 信息載頻為518kHz。對于490kHz 和518kHz 的信號可以直接接收經APD 轉換送入DSP進行處理,對于4 209. 5kHz頻率的中短波要先下變頻至490kHz ,然后做同樣處理即可。
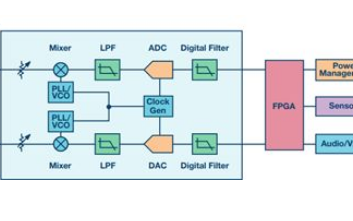
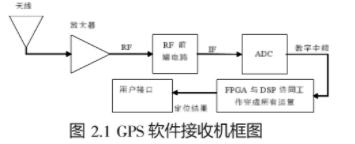
硬件設計主要包括模擬前端的設計、APD 轉換、DSP 處理單元、控制單元和信息處理單元,主要框圖如圖2 所示。

?
模擬前端和信息處理單元的設計和當前的NAVTEX接收機一樣,在這里也不多述。
DSP 處理單元是新型NAVTEX接收機設計的關鍵,它接收控制單元的控制命令,然后進行匹配濾波、放大、信道濾波、信道均衡、定時提取、解調。還要產生自檢信號完成自檢功能。信道噪聲是影響接收機誤碼率的一個重要因素,對數字信號在接收端進行匹配濾波可以使得信噪比達到最佳。定時提取與載波回復是接收機中最為關鍵的部分,它主要完成最佳抽樣點的捕獲,收發碼元頻差的跟蹤、獲取頻波頻率和調整載波相差。在這里可采用數字鎖相環來實現。由于信道的非線性畸變和線性畸變,在接收機中需要加入均衡器來實現對失真信道的補償。在DSP 處理單元產生2FSK的自檢信號,用來完成自檢功能,檢驗接收機的接收信道工作是否正常。當前的自檢電路主要是由74HC4060 及外圍電路組成,在這里直接在DSP 中產生自檢信號然后有控制單元決定是否送回輸入端進行自檢,完成了自檢功能。輸入的信號解調以后輸出到信息處理單元,結束信號接收過程。
算法實現
在本設計中自檢信號的產生可以在中斷中完成,濾波、解調在主程序中完成。主程序的流程圖如圖3 所示。

為了完成信號的接收,需要對信號進行濾波、解調、放大和自檢時輸入信號的產生等多項功能。由于它受DSP 運算速度的限制,它必須有DSP 能夠實時運行的計算有效的算法。
自檢時輸入信號的產生
自檢時輸入信號為2FSK信號即移頻鍵控,它的基本原理是: 當傳輸的數據為0 時發送信號cosω1t ,當傳輸的數據為1 時發送信號cosω2t 。所以產生自檢信號的關鍵是產生正弦P余弦波形。在這里利用數字振蕩器,用迭代方法產生正弦信號。原理比較簡單在這里就不詳述。
信號的解調
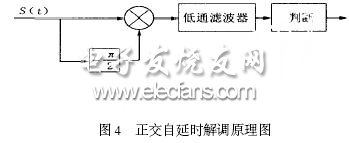
NAVTEX系統采用的是2FSK調制,FSK解調有相干解調和非相干解調,由于相干解調要求設置與發送設備中的高頻載波同頻同相的本地參考載波,使設備復雜,因此在這里采用了一種新的非相干解調算法:正交自延時FSK解調算法。
該算法的原理圖如圖4 所示。
?
NAVEX系統的2FSK信號表達式為:
S ( t) = cos[ (ωc ±δw ) ?t + φ] (1)
S ( t) 與其自延信號S ( t - τ) 的乘積為:
cos[2 ?(ωc ±δw ) ] ?t - (ωc ±δw ) ?τ+ 2 ?φ] +cos[ (ωc ±δw ) ?τ] (2)
令τ滿足ωc ?τ = π/2 ,則(2) 式經低通濾波以后為: ±sin (δw*τ)
這樣就可以根據濾波結果的符號判斷發送信號的值:負號表示發送信號為0 ,正好表示發送信號為1。
由于τ是小數倍延時,所以還要通過一個單零點的FIR 濾波器來實現。濾波器的差分方程為:y ( n) = X ( n) + βX ( n - 1) ,β可以計算出來。
該信號的波特率為100Hz ,采樣率為3 400Hz ,則在每一個波特率周期內的采樣點數為34 。
設S ,DT1 是連續存儲器位置變量,且令:
DT1 = cos[ (ωc ±δw ) ?( n - 1) T + φ]
DT = cos[ (ωc ±δw ) ?( n - α) T + φ]0 < α < 1
則有: DT = S + βDT1
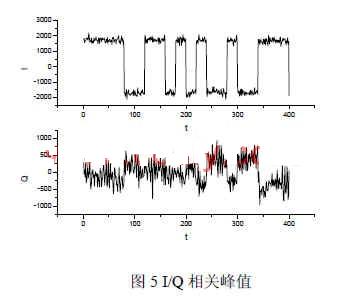
2FSK解調算法的流程如圖5 所示。
LPFOUT 低通濾波輸出;
PJMX 包絡檢波器的判決門限;
SADAT 當前波特率周期內采樣點的數據估計;
SADCT 當前波特率周期內采樣點的計數;
BFDAT 前一個波特率周期的數據估計;
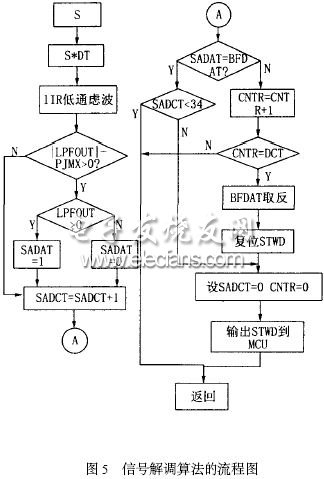
?
STWD DSP 送入MCU 的狀態字;
DCT 設定的數據轉變發生的條件;
CNTR 根據它的值判斷是不是對BFDAT取反。
結論
本設計誤碼率10 - 3 以下,滿足NAVTEX 系統技術指標的要求。在此設計的基礎上還可增加多模無線電導航功能,使其同我國現有的Loran - C 導航系統、北斗導航系統構成全方位的無線導航系統。同時還可以利用軟件化體系結構使其智能化的處理安全信息、導航信息,有了更大的靈活度。















 工商網監
工商網監
評論