 電子發燒友App
電子發燒友App


近年來,隨著集成電路技術的迅猛發展,特別是可編程邏輯器件的高速發展, EDA(Electronic Design Automation,電子設計自動化)技術成為電子設計工程師的新寵。EDA技術以計算機為工具完成數字系統的邏輯綜合、布局布線和設計仿真等工作。電路設計者只需要完成對系統功能的描述,就可以由計算機軟件進行系統處理,最后得到設計結果,并且修改設計方案如同修改軟件一樣方便。利用EDA工具可以極大地提高設計效率。
利用硬件描述語言編程來表示邏輯器件及系統硬件的功能和行為,是EDA設計方法的一個重要特征。VHDL(Very High Speed Integrated Circuit Hardware Description Language,超高速集成電路硬件描述語言)是硬件描述語言的一種,對系統硬件的描述功能很強而語法又比較簡單。VHDL具有強大的行為描述能力,設計者可以不懂硬件的結構,只需集中精力進行電子系統的設計和性能優化;具有方便的邏輯仿真與調試功能,在設計早期就能查驗系統的功能,方便地比較各種方案的可行性及其優劣。目前,VHDL作為IEEE的工業標準硬件描述語言,得到眾多EDA公司的支持,在電子工程領域已經成為事實上通用硬件描述語言。
本文采用VHDL作為工具描述了自動售貨機控制模塊的邏輯控制電路,并在FPGA上實現。該自動售貨機能夠根據投入硬幣額度,按預定的要求在投入硬幣大于規定值時送出飲料并找零。
1? 設計方案
本文所設計的簡易自動售貨機可銷售礦泉水,假設每瓶1.5元。設兩個投幣孔,分別接收1元和5角兩種硬幣,兩個輸出口,分別輸出購買的商品和找零。假設每次只能投入一枚1元或5角硬幣,投入1元5角硬幣后機器自動給出一瓶礦泉水;投入2元硬幣后,在給出一瓶礦泉水的同時找回一枚5角的硬幣。另外設置一復位按鈕,當復位按鈕按下時,自動售貨機回到初始狀態。
開發軟件選用功能強大的Altera公司的可編程邏輯器件開發工具Quartus II 8.0,實現芯片選用Altera公司FLEX10K系列的EPF10K10LC84-4;首先在計算機上完成程序設計、編譯及時序仿真,然后將經過驗證的設計文件下載到選擇的可編程邏輯器件中,并在電子設計自動化實驗系統中進行硬件模擬和測試。
2 狀態機VHDL程序設計
有限狀態機FSM(Finite State Machine)及其設計技術是實用數字系統設計中實現高效率、高可靠邏輯控制的重要途徑。傳統的狀態機設計方法需進行繁瑣的狀態分配、繪制狀態表、簡化次態方程等,而利用VHDL可以避免這些煩瑣的過程,直接利用狀態轉換圖進行狀態機的描述。此外,與VHDL的其他描述方式相比,狀態機的VHDL表述豐富多樣,程序層次分明,結構清晰,易讀易懂;在排錯、修改和模塊移植方面也有其獨到的特點。
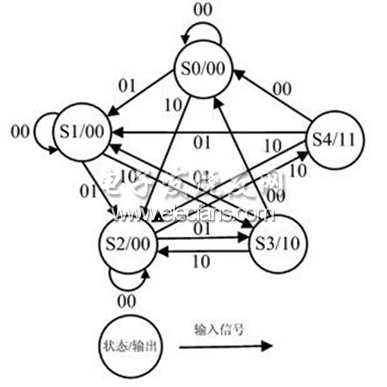
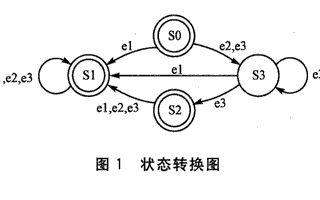
狀態機有摩爾(Moore)型和米立(Mealy)型兩種。Moore型狀態機的輸出信號只與當前狀態有關;Mealy型狀態機的輸出信號不僅與當前狀態有關,還與輸入信號有關。結合本文設計,由于輸出僅與狀態有關,選用了Moore型狀態機設計自動售貨機控制模塊,狀態轉換圖如圖1所示。
?
圖1 自動售貨機狀態轉換圖
1)狀態定義:S0表示初態,S1表示投入5角硬幣,S2表示投入1元硬幣,S3表示投入1元5角硬幣,S4表示投入2元硬幣。
2)輸入信號:取投幣信號為輸入邏輯變量,用兩位的矢量state_inputs表示。state_inputs(0)表示投入1元硬幣,state_inputs(1)表示投入5角硬幣。輸入信號為1表示投入硬幣,輸入信號為0表示未投入硬幣。
3)輸出信號:給出礦泉水和找零為兩個輸出變量,用兩位的矢量comb_outputs表示。comb_outputs(0)表示輸出貨物,comb_outputs(1)表示找5角零錢。輸出信號為1表示輸出貨物或找零,輸出信號為0表示不輸出貨物或不找零。
根據圖1所示的狀態轉換圖,用VHDL中的CASE_WHEN結構和IF_THEN_ELSE語句實現控制功能,源程序如下:
LIBRARY IEEE; --庫和程序包的使用說明
USE IEEE.STD_LOGIC_1164.ALL;
PORT(clk,reset: IN std_logic;
state_inputs:IN std_logic_vector(0 TO 1);
comb_outputs:OUT std_logic_vector(0 TO 1));
END sellmachine;
ARCHITECTURE state OF sellmachine IS --結構體
TYPE fsm_st IS (S0,S1,S2,S3,S4); --狀態枚舉類型定義
SIGNAL current_state,next_state:fsm_st; --狀態信號的定義
BEGIN
reg:PROCESS(reset,clk) --時序進程
BEGIN
IF reset=‘1’ THEN current_state《=S0; --異步復位
ELSIF rising_edge(clk) THEN
current_state《=next_state; --狀態轉換
END IF;
END PROCESS;
corn:PROCESS(current_state,state_inputs) --組合進程
BEGIN
CASE current_state IS
WHEN S0=》comb_outputs《=“00”; --現態S0
IF state_inputs《=“00” THEN next_state《=S0; --輸入不同,次態不同
ELSIF state_inputs《=“01” THEN next_state《=S1;
ELSIF state_inputs《=“10” THEN next_state《=S2;
END IF;
WHEN S1=》comb_outputs《=“00”; --現態S1
IF state_inputs《=“00” THEN next_state《=S1; --輸入不同,次態不同
ELSIF state_inputs《=“01” THEN next_state《=S2;
ELSIF state_inputs《=“10” THEN next_state《=S3;
END IF;
WHEN S2=》comb_outputs《=“00”; --現態S2
IF state_inputs《=“00” THEN next_state《=S2; --輸入不同,次態不同
ELSIF state_inputs《=“01” THEN next_state《=S3;
ELSIF state_inputs《=“10” THEN next_state《=S4;
END IF;
WHEN S3=》comb_outputs《=“10”; --現態S3
IF state_inputs《=“00” THEN next_state《=S0; --輸入不同,次態不同
ELSIF state_inputs《=“01” THEN next_state《=S1;
ELSIF state_inputs《=“10” THEN next_state《=S2;
END IF;
WHEN S4=》comb_outputs《=“11”; --現態S4
IF state_inputs《=“00” THEN next_state《=S0; --輸入不同,次態不同
ELSIF state_inputs《=“01” THEN next_state《=S1;
ELSIF state_inputs《=“10” THEN next_state《=S2;
END IF;
END CASE;
END PROCESS;
END state;
編譯、仿真及FPGA實現



















 工商網監
工商網監
評論