 電子發燒友App
電子發燒友App


工業系統通常由微控制器和FPGA器件等組成,美高森美(Microsemi? )基于 SmartFusion?2 SoC FPGA的馬達控制解決方案是使用高集成度器件為工業設計帶來更多優勢的一個范例。本白皮書重點探討用于工業系統的SmartFusion2系列器件的特性,以及這款器件在TCO(總體擁有成本)概念上比傳統架構好的方面。
工業市場的最新發展一直在推動對高集成度的高性能、低功耗FPGA器件的需求,設計人員對網絡通信的偏好超過點對點通信,這意味著通信應用可能需要額外的控制器,間接地增大了材料清單(BOM)成本、電路板尺寸,以及相關的一次性工程(NRE)費用。TCO是用于分析和評估的生命周期成本的概念,它是與設計相關的所有直接和間接成本的擴展。這些成本包括工程成本、安裝和維護成本、BOM、NRE (R&D)成本及其它,也可能通過考慮系統級因素來實現TCO最小化,從而帶來可持續的長期贏利能力。
美高森美提供具有ARM? Cortex?-M3微控制器硬核、IP集成,以及成本優化封裝,并且具有更小BOM清單和電路板尺寸的SmartFusion2 SoC FPGA器件。憑借低功耗特性和寬工作溫度范圍,這些器件能夠在極端條件下可靠工作,且無需風扇冷卻。通過集成ARM Cortex-M3 IP 和 FPGA fabric,還可以實現更高的設計靈活性和更快的上市速度。美高森美能夠提供多軸馬達控制的多種參考設計和IP生態系統,用于開發馬達控制算法,從而簡化從多處理器解決方案向單一器件解決方案,即向SoC FPGA器件的轉變。
TCO影響因素
以下是影響系統TCO的一些因素。
1. 長生命周期
FPGA器件可以重新編程,即使部署在現場中也不例外,這樣可以延長產品生命周期,允許設計人員集中精力以更快的速度開發新產品。
2. BOM
美高森美基于flash 的FPGA器件無需導引PROM或flash MCU在FPGA上電時載入數據,它們是零級(level zero)非易失性/即時開啟器件。與基于SRAM的FPGA器件不同,由于flash開關不會發生電壓下降(brown out),美高森美基于flash的FPGA器件無需額外的上電監控器。
3. 上市時間
OEM廠商之間的激烈競爭要求設計具有更多的產品差異化和更快的上市速度,提供多款經過測試的IP模塊可以大幅減少設計時間。市場已有多款構建工業解決方案所需的IP模塊,同時,還有多款IP模塊正在開發之中。SoC方案提供的另一項獨特優勢是調試FPGA設計,為了調試FPGA設計,可經由高速接口,利用微控制器子系統(MSS)來提取FPGA器件中的信息。
4. 工程工具成本
一般都認為FPGA工具非常昂貴,美高森美提供具有免費金(gold)許可授權的Libero? 系統級芯片(SoC)或集成開發環境(IDE),僅在開發高端設備時需要付費的許可授權。
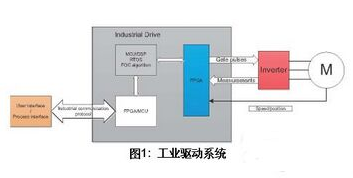
工業驅動系統
工業驅動系統包括一個馬達控制組件和一個通信組件,馬達控制組件包括驅動逆變器邏輯和保護邏輯。通信組件則實現監控控制,負責實施運行時間參數的初始化和修改。
在典型驅動應用中,可能使用多個控制器器件來實施驅動邏輯。一個器件可能執行與馬達控制算法相關的計算,第二個器件可能工作與通信相關的任務,第三個器件可能運行與安全相關的任務。
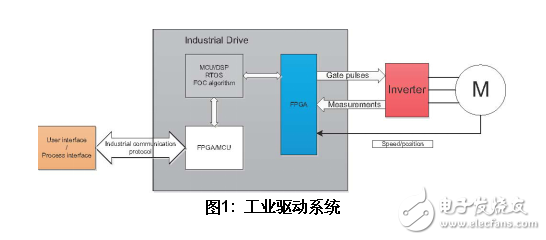
圖1: 工業驅動系統
多軸馬達控制
傳統上的工業馬達控制采用微控制器或數字信號處理(DSP)器件來運行馬達控制所需要的復雜算法。在大多數傳統的工業驅動中,FPGA器件與微控制器或DSP一起用于數據采集和快速動作保護。除去數據采集、脈寬調制(PWM)生成和保護邏輯,傳統上,FPGA器并未在實施馬達控制算法方面發揮著重要作用。
這種方法使用微控制器或DSP來實施馬達控制算法,并不容易擴展至控制超過一個在獨立速率下(多軸馬達控制)運行的馬達,美高森美SmartFusion2器件能夠使用單一器件來實施完整的集成式多軸馬達驅動控制。
控制方面可以分為兩個部分,一部分是與運行磁場定向控制(FOC)算法、速度控制、電流控制、速度估算、位置估算,以及PWM生成相關,另一部件則包括速度曲線、負載特性、過程控制,以及保護(故障和警報)。執行FOC算法是時間關鍵的任務,并且要求在極高的采樣速率下實施(在微秒范圍內),尤其是具有低定子電感的高速馬達,這就需要在FPGA器件中實施FOC算法。過程控制、速度曲線,以及其它保護無需快速更新,因而,可以在較低的采樣速率下進行(在毫秒范圍內),并且能夠在內置Cortex-M3處理器中進行編程。
晶體管開關周期在驅動中發揮著重要作用,如果FOC 回路執行時間比開關階段縮短很多,可將硬件模塊重用于計算第二個馬達的電壓,這意味著在相同的成本下器件的性能更好。
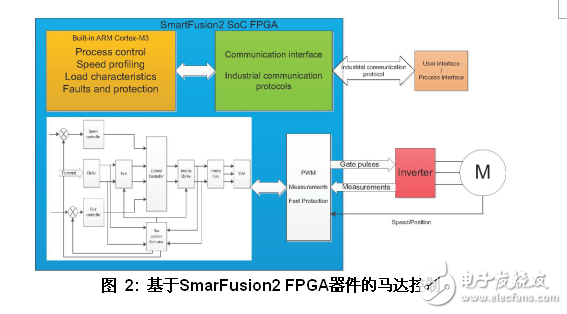
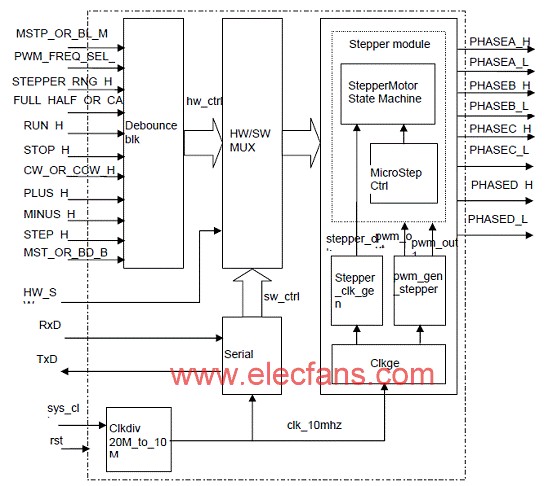
圖 2: 基于SmarFusion2 FPGA器件的馬達控制
馬達控制IP模塊
PI控制器
比例積分(PI)控制器是用于控制系統參數的反饋機制,PI控制器具有兩個可調節的增益參數,用于控制控制器的動態響應——比例增益常數和積分增益常數。PI控制器的比例分量是比例增益常數和誤差輸入的乘積,而積分分量則是累積誤差和積分增益常數的乘積。而后,這兩個分量相加。PI控制器的積分階段會導致系統不穩定,這是由于數據值不可控制的增加。這種不可控制的數據增加稱為卷積(wind-up),所有PI控制器實施方案包括一個抗卷積 (anti-windup)機制,用于確保控制器輸出是有限的。美高森美PI控制器IP模塊使用保持飽和(hold-on-saturation)算法來實現抗卷積,這個模塊還提供設置初始輸出值的附加特性。
圖3所示為無刷FOC算法框圖,這些模塊作為IP core以供使用,本節將會逐一對他們展開討論。
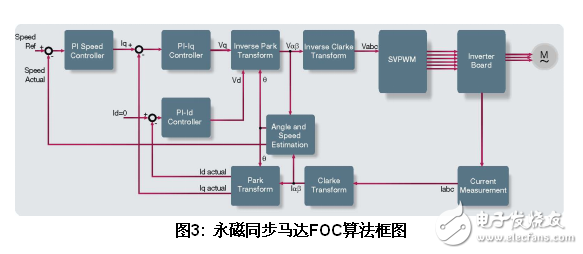
圖3: 永磁同步馬達FOC算法框圖
?
FOC變換
磁場定向控制(FOC)是通過獨立地確定和控制轉矩和磁化電流分量來提供最佳馬達電流的算法,在永磁同步馬達(PMSM)中,轉子已經磁化,因此,為馬達提供的電流只用于轉矩。FOC是計算密集算法,但是,美高森美馬達控制參考設計已經針對器件資源的最優化而構建的,FOC算法包括Clarke、Park、逆Clarke和逆Park變換。
位置和速度估算器
FOC需要精確的轉子位置和速度作為輸入,精確確定轉子角度對于確保低功耗是必不可少的。增添確定位置和速度的物理傳感器,導致系統的成本增加,并降低可靠性。無傳感器算法有助于省去傳感器,但是增加了計算復雜性。
PLL
鎖相環(PLL)用于同步信號,PLL在很多應用中有使用,比如角度估算和逆變器的網格同步。
速率限制器
速率限制器模塊可以實現系統變量或輸入的平滑改變。例如,在馬達控制系統中,如果馬達所需的速度出現突變,系統可能變得不穩定。為了避免此類現象,速率限制器模塊用于從初始速度轉變到所需的速度。速率限制器模塊可以進行配置以控制速率的改變。
空間矢量調制
空間矢量調制模塊提升了DC總線利用率,并且消除了晶體管開關的短脈沖。與使用正弦PWM相比,可將DC總線利用率提升15%。
三相 PWM 生成
在所有計算的最后,可以得到三相馬達電壓。這些電壓用于生成逆變器中晶體管的開關信號,PWM模塊為六個(三個高側和三個低側)晶體管產生開關信號,并且具有死區時間和延遲時間插入等先進特性。可編程的死區時間插入特性有助于避免逆變器引腳上的災難性短路情況,這種情況是由于晶體管的關斷時間而發生的。可編程的延遲插入特性使ADC測量與PWM信號生成能夠同步。該模塊可以配置成與僅由N-MOSFET組成的逆變器或同時由N-MOSFET和P-MOSFET組成的逆變器一起工作。
在 SoC中調試 FPGA設計
通常,與在FPGA器件上進行調試相比,在微控制器上調試設計相對比較容易。在SoC中,可以利用FPGA器件的高性能,同時保持在微控制器中更快速調試的優勢。美高森美SmartFusion2 SoC FPGA中的微控制器子系統和FPGA架構可以通過AMBA APB or AXI總線相互通信。這樣可以把測試數據注入FPGA架構中,或者從FPGA架構中記錄調試數據,從而幫助實現運行時間的內部數據可視化,用于實時調試。固件代碼可以按步運行,在代碼中可以設置斷點來分析FPGA寄存器數據。
基于 SmartFusion2 SoC FPGA的多軸馬達控制解決方案通過USB連接至主機PC,并且與圖形用戶界面(GUI)通信,進行啟動和停止馬達,設置馬達速度數值和其它系統參數,并且可表示多達四個系統變量,比如馬達速度、馬達電流和轉子角度。
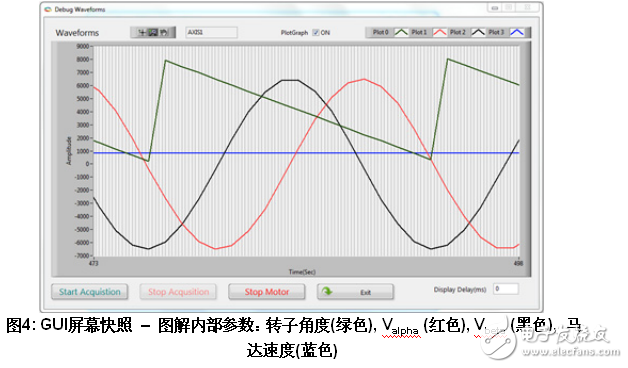
圖4: GUI屏幕快照 – 圖解內部參數:轉子角度(綠色), Valpha (紅色), Vbeta (黑色), 馬達速度(藍色)
生態系統
美高森美提供豐富的IP庫,包括先前章節討論的實現多項馬達控制功能的IP模塊。這些模塊可以輕易進行定制,并且可以在美高森美FPGA器件之間進行移植。使用Libero SoC軟件中的SmartDesign工具,用戶可以通過圖形形式配置和相互連接這些模塊。借助這些IP模塊,設計人員能夠顯著減少在FPGA器件中實施馬達控制算法所需的時間。
這些IP模塊在速度高達30,000 RPM和開關頻率高達400kHz的運行馬達中進行了測試。
工業通信協議
工業網絡的發展趨勢是使用網絡來替代點至點通信,從而實現更快的通信速度。實施此類高速通信需要更高的帶寬支持,這對于微控制器或DSP同時處理馬達控制算法并不容易。在許多案例中,需要使用一個附加的微控制器或FPGA來處理各個馬達控制器之間的通信。通常使用的以太網協議是Profinet、EtherNet/IP和EtherCAT標準,這些標準仍然在不斷演進。其它協議包括CAN和Modbus。在這種情況下使用SoC方案的優勢是在單一FPGA平臺上支持多種工業以太網協議標準。
根據最終系統目標,有可能通過重用IP和協議堆棧(用于通信)來優化系統的成本,或者通過在硬件(FPGA)和軟件(ARM Cortex-M3處理器)中仔細劃分功能來優化性能。美高森美SmartFusion2 SoC FPGA器件具有內置CAN、高速USB、以及一個千兆以太網模塊,這是MSS的一部分。高速SERDES模塊用于實施涉及串行數據傳輸的協議。
安全性
美高森美SmartFusion2 SoC FPGA器件能夠提供多項設計和數據安全功能,差分功率分析(DPA)認證反篡改保護和加密等設計安全功能可幫助保護用戶的IP。SoC FPGA器件還包括多項數據安全特性,比如糾錯編碼(ECC)硬件加速器、AES-128/256,以及SHA-256服務。針對于數據安全性,提供EnforcIT IP Suite和CodeSEAL軟件安全構件。EnforcIT IP套件包括一套可定制內核(作為網表),有效地移動安全層面至硬件中。CodeSEAL將對策措施注入固件中,并且能夠獨立使用,或者作為EnforcIT升級。實施協議的靈活性允許設計人員使用多個安全層來認證來自中央監控控制器的信息。
可靠性
在多個市場中安全標準的發展推動了高可靠性需求,SmartFusion2 FPGA器件經設計滿足高可用性、安全關鍵性和任務關鍵性系統需求。以下是SmartFusion2 SoC FPGA器件提供的某些可靠性特性。
SEU免疫能力零FIT率配置
高可靠性工作需要單粒子翻轉(SEU)免疫能力零(FIT)率的FPGA配置,由于采用Flash來配置路由矩陣和邏輯模塊中的晶體管,SmartFusion2架構對于alpha或中子輻射具有免疫能力。基于SRAM FPGA器件在海平面的FIT率為1k至4k,在海平面之上5000英尺則高出很多。高可靠性應用可接受的FIT率低于20,這使得SmartFusion2最適合于這些應用。
EDAC保護
SmartFusion2 FPGA器件具有錯誤檢測與校正(EDAC)控制器, SEU錯誤日益普遍,即使在地平面也不例外, 使用該特性,可保證在MSS存儲器上防止SEU錯誤。
無需外部配置器件
在具有大量FPGA器件的復雜系統中,使用外部配置器件會降低可靠性。在上電時,FPGA花費時間進行配置,這在使用多個FPGA器件的應用中帶來了設計復雜性。SmartFusion2 SoC FPGA在器件內部包括了配置存儲器,這具有上電即可運行的額外優勢。
軍用溫度等級器件
SmartFusion2 SoC FPGA器件針對軍用溫度條件進行了全面的測試。美高森美軍用等級FPGA器件提供從10k至150k邏輯單元,并伴有允許訪問加密加速器和數據安全功能的特性。
總結
美高森美SmartFusion2 SoC FPGA器件使用高度優化的馬達控制IP模塊和經過驗證的參考設計,能夠提供多項降低工業設計TCO(總體擁有成本)的功能。從微控制器遷移的客戶能夠重用某些傳統代碼,同時FPGA設計人員能夠充分利用FPGA架構和ARM Cortex-M3處理器來創建高效的架構,允許馬達控制模塊和通信模塊同時集成在單一器件中。通過提供ARM Cortex-M3處理器,能夠實現靈活的設計和智能化分區,并可針對性能和成本而進行優化。MSS還可以在運行時注入和記錄數據,加速FPGA設計調試。SmartFusion2平臺還提供實施工業通信協議的多種選項,這款器件提供多項可同時用于設計和數據安全的安全特性,以及滿足可靠性需求的特性。SmartFusion2系列器件備有強大的生態系統支持,能夠幫助客戶以最低TCO來開發工業級解決方案。
?















 工商網監
工商網監
評論