本文將機器視覺與網絡技術相結合,使用TI公司新近推出的6000系列DSPsTMS320DM642為核心,應用ALTERA公司的FPGA,用其實現圖像預處理,減輕了DSPs的負擔。應用網絡技術實現圖像傳輸。
2013-04-07 14:20:46 4342
4342 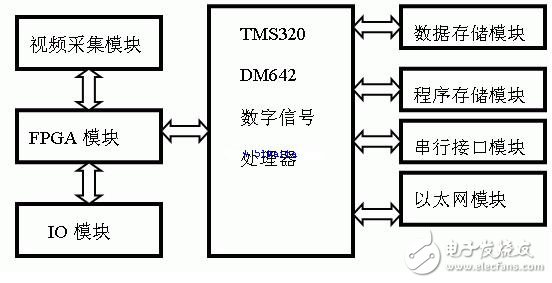
本文的目標是研制一個輪式小車慣性導航系統,能夠通過wifi實現PC終端和手持終端控制輪式小車行動以及小車所采集數據的傳輸。
2015-05-15 09:40:1150430 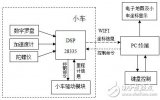
為了實現智能小車穩定快速的自動尋線,采用了“五橫二豎加八字”排列的電磁線圈,能識別各種復雜的賽道。通過三次函數算法求出偏差,并采用差速電機算法處理彎道,實現了電磁導航的功能。實踐證明,該系統能精準地控制智能小車穩定快速地運行,且達到了預期效果。
2015-10-24 11:27:001877 
視覺系統20年前已被廣泛應用于大型工業、醫療設備的精密檢測環節,例如,達芬奇手術機器人。視覺定位導航的穩定性、精度可以很高;視覺系統近5年來已被廣泛應用于商用移動機器人產品的自主定位導航,例如,大疆無人機。復雜環境下的視覺定位導航技術已日益成熟;
2017-11-24 13:19:261243 為了實現智能小車穩定快速的自動尋線,采用了五橫二豎加八字排列的電磁線圈,能識別各種復雜的賽道。通過三次函數算法求出偏差,并采用差速電機算法處理彎道,實現了電磁導航的功能。實踐證明,該系統能精準地控制
2018-01-11 07:25:0011698 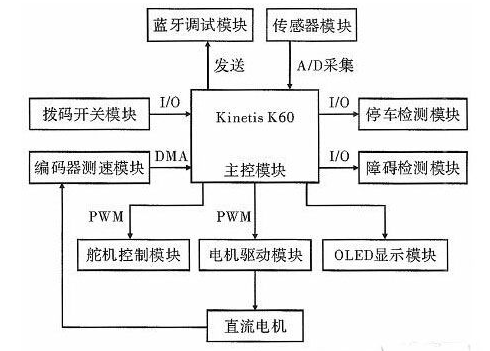
模型,小車的名字為 MickX4,教程一共分為4篇:開源自主導航小車MickX4(一)— 小車底盤硬件開源自主導航小車MickX4(二)— 小車底盤軟件開源自主導航小車MickX4(三)— 小車ROS節點1 小車底盤小車底盤運動控制系統(簡稱:運控系統)主要實現小車底盤的精準速度控制和向工控機提供底盤傳感器
2021-08-06 07:08:33
3.3上拉到5V。 編者結語 本文所設計的輪式小車室內慣性導航裝置,分析了該軟件設計的各個模塊的具體實現方法。經實驗結果表明,該設計能夠實時監測到移動機器人的位置信息,并對其能實現有效控制。同時其
2020-06-14 07:00:00
由于視覺導航技術的應用越來越普及 ,因此 ,有必要對視覺導航中的關鍵技術及應用進行研究。文章對其中的圖像處理技術和定位與跟蹤技術進行了詳細研究 ,并與此相對應 ,介紹的相關的應用。
2023-09-25 08:09:38
想通過GPS導航系統來實現控制小車的路口選擇方向,直接用語音播報可以嗎?還是誰有好的方法
2012-07-21 15:24:52
ROS自動導航小車1.材料清單項目ValueJeston nano(套餐一)¥899GM37-545直流減速電機帶編碼器 DC24V 1:90¥138板子自己畫(附帶電機接口以及IMU)¥200
2022-01-05 06:48:33
本帖最后由 eehome 于 2013-1-5 09:47 編輯
《FPGA開發實例導航》
2012-08-20 19:39:25
申請理由:最近正在從事單目攝像頭局部導航的研究,之前在筆記本上開發,現在要放到智能小車上研究,需要一個體積較小,速度較快的處理器,希望申請成功項目描述:以單目為住搭載其他傳感器的局部智能小車導航技術。
2015-10-23 10:14:28
申請理由:項目描述:現公司在做一個關于導航定位系統的項目。現在設定的主要思路是: 將采集到的加速度計與陀螺的數據,送進FPGA,經過平滑濾波模塊后,再送往MicroBlaze核模塊,與預先標定
2016-10-12 09:52:40
項目名稱:積木編程視覺項目試用計劃:申請理由公司目前有不少視覺算法,但是硬件欠缺。初步希望能集成到小車上實現用戶自訓練模型跑賽道,并結合積木塊編程達到教學目的預計成果小車能跑賽道,通過積木塊控制策略視覺可以實現圖傳
2020-09-25 10:11:49
開發板來完成改項目!項目描述:初步設計是在具備智能小車基本的功能:前進,后退,轉向,同時采用超聲波自動避障……而且還將搭載一個可以自動導航的系統,實施實時導航,跟蹤,報警和回傳功能,如果可以還將搭載攝像頭實時回傳圖像功能,這都是初步設想。
2015-08-12 21:08:56
雷達定位等方式,硬件上多采用個人電腦,普便帶有工作柔韌性差, 以及過于龐大,造價昂貴等缺點,設計基于嵌入式系統的視覺導航小車系統。硬件上設計了一個以210為數據處理核心,以CPLD為PWM信號發生器
2015-07-25 10:18:22
項目名稱:基于PYNQ的神經網絡自動駕駛小車試用計劃:一、本人技術背景本人有四年以上的嵌入式開發和三年以上的機器視覺領域項目實踐經驗,在計算機視覺與FPGA數字圖像處理方面有較多的理論研究與項目實踐
2018-12-19 11:36:24
大的TMS320C6748 DSP開發板開發看看!項目描述:初步設想是在實現小車的基本功能:前進,后退,轉向等的基礎上,加上自動導航系統,實時進行監控,同時還設想可以加上攝像頭回傳場景到PC設備上,實現某些地方人或者監控無法到達的地方。
2015-09-09 17:03:58
摘要:針對現有小型無人機導航系統的解算速度慢、多處理器核心臃腫可靠性差的缺點,實現了一種僅使用單一FPGA作為數據處理核心的小型高速導航解算系統。該系統對飛機運動方程組和導航方程組進行并行化分
2019-07-03 06:57:34
根據結構化道路環境的特點提出了一種將邊沿檢測和道路環境知識相結合的機器視覺算法 , 并結合基于行為響應的路徑規劃方法和智能預瞄控制方法 , 實現了一套基本的機器人視覺導航系統 . 在自主機器人實驗
2023-09-25 07:23:39
我自己了解ARM不是很多,想問一下大家,最近想做一個基于雙目視覺的避障自主導航無人車,我想在ARM上面搭載GPS模塊,實現無人車自動導航功能,另一方面我還想利用車載PC的OpenCV在處理完雙目
2017-03-18 13:19:01
統采用Gige Vision攝像機來獲取圖像,在FPGA中采用了Gige Vision IP核,根據TCP/IP傳送協議實現了FPGA與PC機的數據通訊。1 FPGA實現機器視覺的優勢 隨著機器視覺
2013-09-04 12:14:55
基于ARM和FPGA的智能小車監控系統
2012-08-18 15:23:13
第 25 卷 第 9 期電子設計工程 2017 年 5 月Vol.25 No.9Electronic Design EngineeringMay. 2017基于STM32 智能小車視覺控制導航的設計李曉...
2021-08-17 06:40:21
采用差速電機算法處理彎道,實現了電磁導航的功能。實踐證明,該系統能精準地控制智能小車穩定快速地運行,且達到了預期效果智能小車尋線道路設計要求是:在中間鋪設了一條直徑為0.5 mm的銅質漆包線,漆包線
2016-01-06 16:16:06
結構的兩片STC89C52單片機構成,主芯片同時對三個處于不同位置的聲音接收模塊的音頻信號進行處理和時間差測量,從芯片控制小車上的聲源發出音頻信號,根據主芯片用無線信號傳送過來的誤差信號,引導小車往目的地運動,也可實現路線選擇及較精確定位,使該聲音導航定位小車具有智能化。
2011-03-02 16:28:22
嵌入式車載導航信息系統結構是怎樣構成的?如何去實現導航矢量圖形系統?怎樣去設計導航數據庫管理系統?
2021-05-13 06:22:06
我打算在FPGA上實現許多計算機視覺算法。 Digilent Atlys是這類應用的良好平臺嗎?我是初學者,不能自己解決這個問題。Digilent Atlys:http
2019-10-28 07:10:38
怎么實現基于北斗導航芯片和ZigBee的無線終端的設計?
2021-05-21 06:16:36
為什么要設計一種基于STM32的視覺導航系統呢?怎樣去設計一種基于STM32的視覺導航系統呢?
2021-11-18 07:08:17
使用慣性導航定位和藍牙通信做智能小車從a到b點行駛,求助,有人能做嗎
2019-05-30 20:32:28
電磁導航AGV小車、激光導航AGV小車、磁條導航AGV小車、二維碼導航AGV小車、視覺導航AGV小車等。在各種形式中最能將AI技術加以應用的要屬視覺導航類的產品了,可通過攝像機動態獲取車輛周圍環境圖像
2022-01-08 09:16:43
小車、二維碼導航AGV小車、視覺導航AGV小車等。在各種形式中最能將AI技術加以應用的要屬視覺導航類的產品了,可通過攝像機動態獲取車輛周圍環境圖像信息并與圖像數據庫進行比較,并在一次次的比較后進行深入
2021-09-13 16:41:03
小車、二維碼導航AGV小車、視覺導航AGV小車等。在各種形式中最能將AI技術加以應用的要屬視覺導航類的產品了,可通過攝像機動態獲取車輛周圍環境圖像信息并與圖像數據庫進行比較,并在一次次的比較后進行深入
2021-09-30 16:28:20
自動實現循跡導航的高新科技。方案論證系統總體方案一、小車控制系統的結構框圖二、程序流程框圖三、循跡原理的簡單描述循跡是指小車在白色地板上,循黑線行走通常采取的方法是紅外探測法,紅外探測法即利用紅外線光遇到白色物體表面具有不同的反射性質的特點,在小車行駛過程...
2021-07-21 07:29:12
為什么要設計一個輪式小車慣性導航系統?輪式小車慣性導航系統的軟件裝置怎樣去設計?輪式小車慣性導航系統的硬件裝置怎樣去設計?如何去測試輪式小車慣性導航系統?
2021-04-19 11:35:46
傳感器配合使用,就可以實現精準的激光無軌導航功能。LNM-v1.0(工業級)無軌導航目前,蘇州智偉達機器人科技有限公司與各大公司合作已經實現了LNM模塊無軌導航功能的應用。實驗證明,直流無刷電機小車、輪轂
2017-06-10 14:07:17
自主導航小車AGV定位方法的研究[1]
2016-08-29 11:07:35
小車、二維碼導航AGV小車、視覺導航AGV小車等。在各種形式中最能將AI技術加以應用的要屬視覺導航類的產品了,可通過攝像機動態獲取車輛周圍環境圖像信息并與圖像數據庫進行比較,并在一次次的比較后進行深入
2021-10-14 11:40:15
通過對基于視覺的自動導航車(AGV)設計方法的研究,提出了應用自動導航車設計物資搬運系統的框架結構。系統利用無線收發模塊進行主從工作站間的實時無線通訊,利用CCD 攝像
2009-06-18 09:34:30 27
27 隨著在工業、農業等領域中自動化程度的不斷增長,自動導航小車(簡稱AGV)在各領域的作用也相應提高。考慮到自動導航小車會在各種環境中工
2009-09-10 10:32:5348 本設計是基于EasyFPGA030的模擬開小車的設計,用EasyFPGA030開發套件,用6個發光二極管模擬6個汽車尾燈(汽車尾燈左右各3個),用2個開關作為轉彎控制信號,一個左轉,一個右轉。
2009-11-02 16:56:3432 實現了扎針機器人的視覺導航。以VC++作為開發工具,運用開源的計算機視覺庫OpenCv,采集圖像信息,進行圖像處理,得到活檢針的數據,控制機器人完成扎針。實驗表明此方法穩定,
2010-01-20 13:59:1165 一種新穎實用的基于視覺導航的三維重建算法
根據立體視覺在視覺導航應用中的特點,提出了由視差圖重建三維場景的整套算法。首先,推導視差圖里各點在攝
2010-02-27 09:24:0718 本設計是基于EasyFPGA030的模擬開小車的設計,用EasyFPGA030開發套件,用6個發光二極管模擬6個汽車尾燈(汽車尾燈左右各3個),用2個開關作為轉彎控制信號,一個左轉,一個右轉。當
2010-03-11 15:33:1630 摘要:本文介紹了利用紅外反射式傳感器實現小車自動尋跡導航的設計與實現。自動尋跡是基于自動導引小車(AGV--auto-guided vehicle)機器人系統,用以實現小車自動識別路線,判斷并
2010-12-30 22:10:40174 直擴導航系統中數字科思塔斯環的FPGA設計與實現
引言
擴頻接收機載波的同步包括捕獲和跟蹤兩個過程,載波捕獲即多普勒頻移的粗略估計通常包含在偽
2010-03-01 09:11:451060 
本文介紹了利用紅外反射式傳感器實現小車自動尋跡導航的設計與實現。自動尋跡是基于自動導引小車 (AGV —auto2guided vehicle) 機器人系統 ,用以實現小車自動識別路線 ,判斷并自動
2016-03-16 14:40:384 基于FPGA的手術導航定位系統,很好的設計資料,快來學習吧。
2016-05-09 15:46:278 智能小車的方向控制方法,便與學習,理解智能小車。
2016-05-10 15:12:343 兩輪自平衡小車的設計與實現,基于STM32控制的自平衡雙輪小車,其中機械部分包括車體、車輪、步進電機、鋰電池等部件設計加工。
2016-05-19 15:16:1520 三目立體視覺外極線校正及其FPGA實現方法
2016-09-17 07:30:2416 智能循跡避障小車設計與實現
2017-06-06 08:48:15304 針對基于視覺導航的航跡規劃技術存在的兩個問題:第一,作為一類存在有限測量量程的導航系統,視覺導航系統需要目標始終出現在攝像頭的視野內;第二,當目標始終在攝像頭的光軸延長線附近時,視覺算法能夠更有
2017-10-30 18:45:552 以往大多數白主路徑規劃機器人都是從傳感器獲得相關數據進行障礙物感知,再進行路徑規劃。隨著計算機技術和電子技術的發展,視覺導航已經成為導航技術的主要方式之一。在基于視覺的移動機器人導航系統中,機器視覺
2017-11-01 11:46:355 自動導引小車( AntomatedGuidedVehicle,AGV)是指裝備有電磁或光學等自動導引裝置,可以在規定的導航路徑上行駛,是具有安全保護以及各種移載功能的運輸小車.AGV的導引方式有電磁
2017-11-10 09:42:1436 ,慣性導航,視覺導航等其中,視覺導航15一7]通過攝像頭對障礙物和路標信息拍攝,獲取圖像信息,然后對圖像信息進行探測和識別實現導航它具有信號探測范圍廣,獲取信息完整等優點,是移動機器人導航的一個主要發展方向,而基于非
2017-11-12 10:55:5510 agv小車目前在工業領域已經得到了普遍的應用,那么agv小車怎樣實現定位?本文主要介紹agv小車的定位方法,詳細說明了agv小車光敏器件定位法和AGV小車自動送料車定位系統的應用。
2017-12-14 11:15:5132924 本文的目標是研制一個輪式小車慣性導航系統,能夠通過wifi實現PC終端和手持終端控制輪式小車行動以及小車所采集數據的傳輸。搭建如下圖1所示的系統,TI公司的浮點DSP TMS320F28335
2018-04-25 22:05:001161 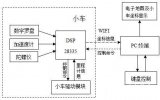
首先對基 于單 片機 的 GPS導航小 車進行 了整體 結構設計 ,說 明了小 車模 型的意 義 ,實現 自動行駛功能 :其次分別介 紹 了單片機控制器 、GPS模塊 、無線傳輸模塊 和小車
2019-04-25 08:00:003 通過視覺觀察進行導航是AI導航的核心
2019-06-27 10:15:595808 該款無軌導航AGV小車是針對工廠、物流等運輸業研發的國內首款無軌導航并支持二次擴展的移動機器人平臺,同時也是一款完全自主移動的智能輪式機器人。能自動識別所在通道、電梯和房間的位置,使用激光掃描全自動
2019-10-25 16:12:373555 英特爾公司近日宣布收購Omnitek,后者是一家領先的優化視頻和視覺FPGA IP解決方案提供商。Omnitek的技術在FPGA上實現了定制的高性能視覺和人工智能(AI)推理功能,能夠滿足各個終端市場的客戶需求。
2019-08-11 11:46:46377 本文介紹了利用紅外反射式傳感器實現小車自動尋跡導航的設計與實現。自動尋跡是基于自動導引小車(AGV — auto 2guided vehicle) 機器人系統 , 用以實現小車自動識別路線 , 判斷
2019-09-06 17:04:4718 AGV設備需考慮導航、安全防護、貨物識別、運動控制等要素,本次小編要介紹的是AGV小車的導航方案。
2019-10-04 16:48:003178 視覺導航是采用CCD 攝像頭拍攝路面圖像,運用機器視覺等相關技術識別路徑,實現自動導航的一種新興導航方法。
2019-11-06 18:03:008 康道智能解說激光導航AGV小車打造的柔性化產線的優點有哪些?AGV打造柔性生產線應用:通過AGV小車構建現代化柔性生產流水線可有效利用空間,減少車間因為傳統流水線的障礙提高人工效率,通過設置AGV
2020-03-14 14:45:001147 1月9日消息,今日搜狗地圖上線了手機地圖AR實景駕駛導航功能,以視覺感知和計算能力為基礎、AR為表現形式實現了高精度導航。
2020-01-10 09:18:046689 由于視覺導航技術的應用越來越普及,因此,有必要對視覺導航中的關鍵技術及應用進行研究。文章對其中的圖像處理技術和定位與跟蹤技術進行了詳細研究,并與此相對應,介紹的相關的應用。
2020-06-16 17:40:5217 傳統的物流倉儲智能車是在地面畫線或者在地面埋電線,設計的小車的創新點依靠OpenMV視覺模塊非循跡直接導航,視覺模塊將外界信息處理并傳輸給主控板,主控板根據接收到的消息,讓電機驅動板控制小車靠近目標,讓舵機驅動板控制手臂手抓完成抓球或者放球的動作.
2020-06-17 16:19:3215 的狀態控制輸入,從而實現移動機器人的橫向運動控制。該方法無需進行攝像機的外部參數標定,大大簡化了計算過程,提高了視覺導航的實時性。
2020-07-03 17:45:0720 根據結構化道路環境的特點提出了一種將邊沿檢測和道路環境知識相結合的機器視覺算法并結合基于行為響應的路徑規劃方法和智能預瞄控制方法實現了一套基本的機器人視覺導航系統。在自主機器人實驗平臺ATRV2上的實驗結果表明,該視覺導航系統能夠實時理解結構化道路環境,并且能夠控制機器人沿著合理路徑行駛。
2020-07-06 14:54:5823 概述了視覺導航技術。視覺導航依據視覺圖像,利用圖像處理、計算機視覺、模型識別等相關技術獲取運動體的運動信息和空間位置信息, 實現導航。首先, 簡單比較了各種常用的導航方式, 分析了視覺導航的研究意義
2020-08-04 17:02:218 導航方法, 它的靈感來源于自然界中的昆蟲視覺機理,由此而進行仿生、光譜分析、圖像識別、自主導航等一系列工作,使微型飛行器實現像昆蟲一樣自由飛行而創造了理論和技術基礎。
2020-08-13 17:43:255 通過對家政服務環境以及機器人需要完成的任務進行分析,融合機器視覺和深度學習技術設計了一種家政服務機器人視覺導航識別算法。該算法基于you Bot機器人硬件平臺和ROS(Robot Operating
2020-08-14 15:54:0018 GPS衛星導航接收機有多種多樣的類別,依據不同的分類方法,可以分為: C/A碼與 P碼,單頻與雙頻,導航與定位,授時與測量,手持、車載、機載、彈載與星載等。根據 GPS接收機硬件架構實現的不同,又可
2020-08-14 17:00:381710 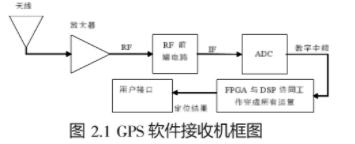
較晚,但是未來的發展一片大好。 AGV小車的整個制作過程是非常復雜的,所以對技術也有一定的要求,涉及運動控制系統、躲避障礙物機制、導航技術、視覺識別系統等各個方面的技術。在這里一系列技術中,導航技術最為關鍵。 晨控智能RFID針對AGV小車
2020-08-25 14:12:511149 
技術發展的日益成熟, 我們有理由相信在不久的將來完全可以用攝像頭來代替人眼, 用功能強大的嵌入式系統代替人的大腦, 從而部分或完全實現智能駕駛。筆者最近在實驗室完成了一項“用單目視覺進行小車導航” 的試驗。主要任務就是
2020-08-27 16:57:5917 隨著物流工業發展迅速,agv小車使用也越來越廣泛,agv小車中有兩種導航模式,一種是激光導航,還有一種則是磁導航,今天我們就來說說磁導航agv小車,在說這款產品之前,我們首先要了解什么是agv
2020-09-03 15:07:041756 的小車速度和載重量的要求。目前,利用光電技術進行導航的手段主要有: 激光雷達(LiDAR )導航、機器視覺(MachineVision) (計算機視覺)導航、紅外(IR) 導航、基于激光陀螺儀和加速度計的慣性導航(INS)和其它一些利用光電子器件進
2020-11-19 16:53:3112 相信對AGV有過了解的朋友都知道,當我們在進行工業生產過程時,重載AGV小車可以幫我們實現無人駕駛搬運的一個工作,可以保證AGV在運行時不用通過人工干預的情況下來完成現場的搬運工作,通過無人駕駛技術
2020-12-23 16:18:493439 本文給出一種實時計算場景稠密深度圖的多目立體視覺機設計與實現方法。立體視覺機使用多個微型攝像機同步獲取場景圖像,采用圖像修正、LoG濾波、多立體圖像對匹配和稠密深度圖等并行算法,利用FPGA的大規模
2021-04-02 09:33:0021 基于視覺/慣導的無人機組合導航算法綜述
2021-06-23 15:52:2019 agv小車已經成為現代物流倉儲中的一項利器,不僅能高精度地搬運重物,還能多機調度,在行駛過程中也不會發生碰撞。它主要憑借激光雷達作為傳感器探測外界環境,實現導航與定位,具備高可靠性與靈活性。但它
2021-07-02 10:57:061183 自動實現循跡導航的高新科技。方案論證系統總體方案一、小車控制系統的結構框圖二、程序流程框圖三、循跡原理的簡單描述循跡是指小車在白色地板上,循黑線行走通常采取的方法是紅外探測法,紅外探測法即利用紅外線光遇到白色物體表面具有不同的反射性質的特點,在小車行駛過程...
2021-11-06 19:06:0115 【樹莓派小車繞樁實驗報告】電導 沒過樹莓 燒過小車 愛過一、實驗目的:綜合運用本學期學習的內容,實現小車完整地在“8”字形跑道上巡線行駛在保證小車不撞墻、不撞箱、不走錯跑道的三大前提下,盡可能地跑出
2022-01-14 11:17:5311 隨著信息技術的發展,AGV(Automated Guided Vehicle,AGV)無人自動導航小車已被廣泛應用于智能制造、智慧物流等場景。AGV搬運車的導航系統主要利用視覺、激光雷達等傳感器
2022-04-22 09:16:202633 探測和測距的遠程感應技術,利用脈沖激光的形式測量不同的距離,激光 LiDAR 傳感器幫助機器人定位、導航和躲避障礙物,這樣機器人就能夠感知周圍環境,并規劃一條通暢的路徑。在實際應用中,我們所面臨的挑戰之一就是避開落差或臺階,從而實現小車安全的自主導航。
2022-05-20 13:06:042466 視覺語言導航(VLN)是一個新興的研究領域,旨在構建一種可以用自然語言與人類交流并在真實的3D環境中導航的具身代理,與計算機視覺、自然語言處理和機器人等研究領域緊密關聯。
2022-09-20 14:30:302611 駛往指定的目的地。想要實現自動化流程,需確保機器人能可靠識別貨物載體,并定位方向準確。只有扁平型的機器人小車,才能適用于在貨架間的自動化引導運輸,因此,導航系統也必須緊湊。
2022-11-04 14:11:301227 以車道標示線為道路邊緣的視覺檢測是AGV路徑識別需要實現的基本功能。視覺導航式AGV是利用ccd攝像機采集地面鋪設的條帶狀標示線,采用圖像處理和分析的方式來獲取導引車周圍環境信息,這種方式是AGV識別系統中的核心技術。
2023-03-20 12:41:301173 對于一臺激光導航掃地機器人而言,全天候作業并非難事,那么純視覺導航掃地機器人能做到嗎? 無論對于人,還是機器人,光線環境的變化對“眼睛”的影響都是致命的。由于視覺傳感器對于光線十分敏感,在家庭場景
2023-04-28 11:05:24618 
視覺紋理導航,亦稱Visual SLAM導航,通過自動導引車車載視覺傳感器獲取運行區域周的圖像信息來實現導航的方法。視覺導航是以地面紋理為特征信息的視覺導航AGV
深圳市不止技術有限公司是激光雷達
2022-04-29 10:01:032613 
 電子發燒友App
電子發燒友App
















 工商網監
工商網監
評論