本篇繼續介紹狀態機的使用,在上篇的基礎上,通過簡化按鍵去抖邏輯,并增加按鍵長按功能,進一步介紹狀態圖的修改與狀態機代碼的實現,并通過實際測試,演示狀態機的運行效果。
2022-09-03 21:26:52 3277
3277 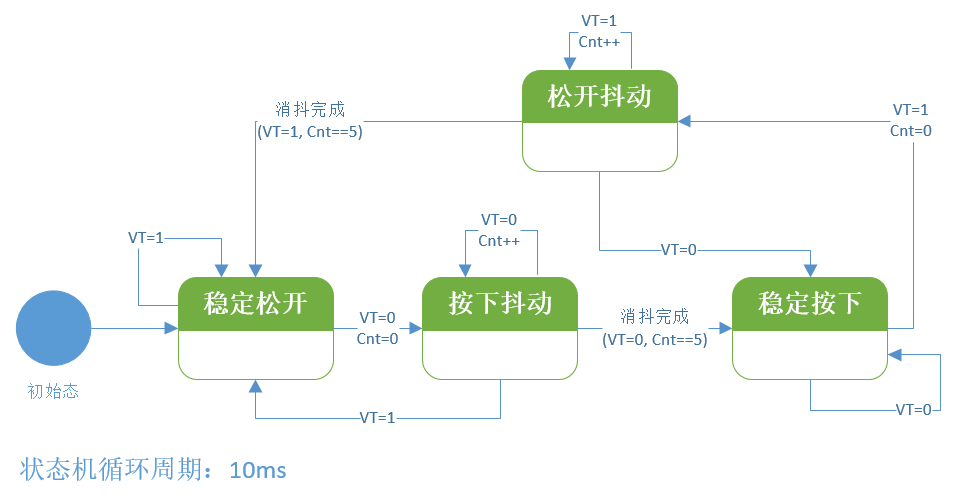
在verilog中狀態機的一種很常用的邏輯結構,學習和理解狀態機的運行規律能夠幫助我們更好地書寫代碼,同時作為一種思想方法,在別的代碼設計中也會有所幫助。 一、簡介 在使用過程中我們常說
2024-02-12 19:07:391818 
幫助。 產生原因 競爭 :在組合邏輯電路中不同路徑的輸入信號到達同一個門級電路時,在時間上有先有后,這種先后時間上的差異稱之為競爭(Competition) 冒險 :由于競爭的存在,信號在過渡時間瞬間可能產生錯誤的輸出,例如尖峰脈沖。成
2024-02-18 14:34:11456 
控制狀態機控制狀態機的初始化和狀態轉換的最佳方法是使用枚麗型輸入控件。一般使用自定義類型的枚麗變量。使用子定義類型的枚麗變量可以是控件和實例乊間存在關聯,使得添加或刪除狀態時所有的枚麗型輸入控件副本自動更新。
2014-02-13 12:39:31
最實用的狀態機模板
2017-06-08 15:45:18
狀態機 狀態圖
2012-08-22 19:45:36
程序一運行 就開始自動運行程序 狀態機各種各種狀態開始執行 我這里是布爾變量 每一秒點亮一個布爾按鈕。我現在想在界面增加一個暫停按鈕 當點暫停時候 此時暫停按鈕文字成為繼續 如果 狀態機執行第二步
2018-04-09 09:23:30
剛開始學fpga,讀資料,有些名詞不太理解,比如狀態機,我只知道fpga就是由查找表和觸發器構成的,狀態機這個概念是怎么提出來的,干什么使得,求大神講解,什么情況下用到
2013-04-25 18:35:55
狀態機可歸納為哪幾個要素?狀態機可分為哪幾種?什么是消息觸發類型的狀態機?
2021-04-19 06:02:21
以前寫狀態機,比較常用的方式是用 if-else 或 switch-case,高級的一點是函數指針列表。最近,看了一文章《c語言設計模式–狀態模式(狀態機)》(來源:embed linux
2022-02-15 06:01:46
自己編寫的狀態機結構程序
2017-08-14 21:46:43
進行程序設計的基本方法與技巧。一、有限狀態機分析設計的基本原理對于電子技術和電子工程類的讀者,最先接觸和使用到狀態機應該是在數字邏輯電路課程里,狀態機的思想和分析方法被應用于時序邏輯電路設計。其實
2008-07-10 18:00:24
.smp_rdy_i和rdy_i是來自其他模塊的信號,它與狀態機處于同一時鐘域,但是從寄存器輸出后,兩個信號傳遞了一些組合邏輯。通常,關于A,B,C,D的跳躍碼如下:來自A-B-C-D的狀態,我認為在狀態D中
2020-07-08 10:51:29
本帖最后由 inception1900 于 2015-11-16 14:51 編輯
tmp,tmp_num 是std_logic_vector(15 downto 0),tmp輸入,tmp_num 輸出,如何消除下面VHDL描述組合邏輯出現的競爭(不采用時鐘方式)tmp_num(15)
2015-11-16 14:50:26
`對于一個組合邏輯電路,如果有兩個輸入端,那么只有兩個輸入端一個從0變1,另一個從1變0是才有可能產生競爭冒險嗎,如果開始時兩個輸入端都是1,那么同時從1變0時會不會產生競爭。例如異或門,開始始輸入
2015-12-22 18:49:44
來看看三種方式是如何實現的。 (各種圖片,各種坑爹啊 - -!)一段式狀態機 當把整個狀態機卸載一個always模塊中,并且這個模塊既包含狀態轉移,又含有組合邏輯輸入/輸出時,稱為一段式狀態機。不
2012-03-09 10:04:18
影響電路工作的可靠性、穩定性,嚴重時會導致整個數字系統的誤動作和邏輯紊亂。下面就來討論交流一下FPGA 的競爭冒險與毛刺問題。
在數字電路中,常規介紹和解釋:
什么是競爭與冒險現象:
在組合電路中
2023-11-02 17:22:20
今天給大俠帶來如何寫好狀態機,狀態機是邏輯設計的重要內容,狀態機的設計水平直接反應工程師的邏輯功底,所以很多公司在硬件工程師及邏輯工程師面試中,狀態機設計幾乎是必選題目。本篇在引入狀態機設計思想
2020-09-28 10:29:23
FPGA狀態機的文書資料
2014-09-14 19:01:20
FPGA中競爭冒險問題的研究
2012-08-04 16:16:06
競爭冒險:在組合電路中,當邏輯門有兩個互補輸入信號同時向相反狀態變化時,輸出端可能產生過渡干擾脈沖的現象,稱為競爭冒險。那么 FPGA 產生競爭冒險的原因是什么呢? 信號在 FPGA 器件內部通過
2024-02-21 16:26:56
冒險往往會影響到邏輯電路的穩定性。時鐘端口、清零和置位端口對毛刺信號十分敏感,任何一點毛刺都可能會使系統出錯,因此判斷邏輯電路中是否存在冒險以及如何避免冒險是設計人員必須要考慮的問題。如何處理毛刺
2018-08-01 09:53:36
和二進制表示有沒有什么影響?3,好的狀態機寫法是,在狀態判斷的組合邏輯always塊中,最好先定義一個初始化狀態,case中最好定義一個默認狀態,初始化狀態是不是必要,定義為全零好還是不定態“x“好呢。困擾好久了,求解答,謝謝
2014-03-06 19:49:09
摘 要:以現場可編程門陣列(以下簡稱FPGA)在設計中由于其內部構成,容易引起競爭問題。以我們在實驗教學中的應用與實踐為主線,詳細介紹了消除競爭冒險的各種方法。關鍵詞:現場可編程
2009-04-21 16:44:44
時序電路)。 在組合邏輯電路中,任何時刻的輸出僅僅取決于該時刻的輸入,與電路原來的狀態無關。這就是組合邏輯電路在邏輯功能上的共同特點。在上一節中,設計的三人表決器就是組合邏輯電路,輸出與輸入一一對應,和其他
2023-02-21 15:35:38
求LABVIEW狀態機與隊列的詳細資料。
2015-12-12 15:35:01
本帖最后由 afnuaa 于 2017-5-24 11:22 編輯
狀態機是一種普遍而有效的架構,我們可以利用狀態機設計模式來實現狀態圖或流程圖的算法。State Machines
2017-05-23 17:11:34
執行超時里的東西。一旦VI檢測到有更新就會觸發用戶事件。狀態機執行用戶事件里的東西。(如圖3)用戶事件里的東西,我們就是把開始這個全局變量的值改變。當開始的值改變后就能進入邏輯判斷的VI了,該VI在處理
2018-12-25 16:53:35
的邏輯時,往往能化繁為簡,出奇制勝。由于狀態機的特殊編程機制,狀態機往往配合事件驅動機制來配合一起使用。raw os巧妙地把狀態機編程引進到了空閑任務里,這樣的話系統空閑的時候可以進行面向狀態機的編程
2013-02-27 14:35:10
波形仿真時verilog 寫的狀態機被綜合掉,編譯沒有錯誤,狀態轉移也沒錯,什么原因可能導致這種問題呢。
2017-10-05 11:31:26
的RTL視圖中可以看出二進制比獨熱碼使用更少的寄存器。 二進制用7個寄存器就可以實現100個狀態的狀態機,但是獨熱碼就需要100個寄存器。但是另一方面,雖然獨熱碼使用更多的寄存器但是其組合邏輯相對簡單
2016-12-26 00:17:38
;(2)二段式:用兩個always模塊來描述狀態機,其中一個always模塊采用同步時序描述狀態轉移;另一個模塊采用組合邏輯判斷狀態轉移條件,描述狀態轉移規律以及輸出;(3)三段式:在兩個always
2015-05-25 20:33:02
穩定狀態所需的時間不同,稱為競爭。 邏輯門因輸入端的競爭而導致輸出產生不應有的尖峰干擾脈沖(又稱過渡干擾脈沖)的現象,稱為冒險。 在實際電路中,輸入信號通過每一個門電路然后輸出,它總是要有傳輸時間
2020-04-24 15:07:49
一. 什么是狀態機我們以生活中的小區的停車系統為例:停車桿一般沒車的是不動的(初態),有車來的時候需要抬桿(狀態1),車通過需要放桿(狀態2),如果在放桿的過程中突然有車,又需要抬桿(狀態3
2022-01-06 08:01:00
目錄1 前言2 狀態機2.1 什么是狀態機2.2 狀態機的概念2.3 使用狀態機寫鍵盤的思路3 代碼實例3.1 使用軟件3.2 protues電路圖3.2 狀態機部分程序3.3 Keil工程文件
2022-01-24 06:23:02
什么是狀態機?狀態機是如何編程的?
2021-10-20 07:43:43
文章目錄1、什么是狀態機?2、狀態機編程的優點(1)提高CPU使用效率(2) 邏輯完備性(3)程序結構清晰3、狀態機的三種實現方法switch—case 法表格驅動法函數指針法小節摘要:不知道大家
2021-12-22 06:51:58
在組合邏輯中,由于門的輸入信號通路中經過了不同的延時,導致到達該門的時間不一致叫競爭。產生毛刺叫冒險。 如果布爾式中有相反的信號則可能產生競爭和冒險現象。 解決方法:一是添加布爾式的消去項,二是在芯片外部加電容。
2019-08-02 11:57:35
在嵌入式,機器人領域,由于多的復雜邏輯狀態,我們編寫程序的時候不得不考慮很多種情況,容易造成功能間的沖突。有限狀態機(finite-state machine),簡稱狀態機,是一種表示有限個狀態以及狀態間轉移等行為的數學模型。狀態機簡單來說
2021-12-20 06:51:26
從事邏輯設計的小伙伴對狀態機這個詞并不陌生,什么兩段、三段狀態機耳熟能詳,摩爾、米利狀態機型倒背如流。然而不得不承認的是讀別人的RTL代碼真的是一件痛苦的事情,那狀態機可否更優雅的呈現呢?狀態機那些
2022-07-13 14:56:24
的輸出與輸入直接相關,時序邏輯的輸出和原有狀態也有關。●組合邏輯立即反應當前輸入狀態,時序邏輯還必須在時鐘上升沿觸發后輸出新值。●組合邏輯容易出現競爭、冒險現象,時序邏輯一般不會出現。●組合邏輯的時序
2017-11-17 18:47:44
積少成多,集腋成裘,堅持!!!目錄1. 進制轉換2. 狀態機和編碼方式3. 存儲器的分類4. Verilog語法中的操作符5. 對組合邏輯的認識6. 對時序邏輯的認識7. 競爭冒險的認識8.
2021-07-26 07:14:31
根據CLD的課程寫的取款機的邏輯。一邊看一邊改,從最簡單的狀態機,到事件驅動,生產者消費者模型,隊列狀態機,最后到AMC。實現的功能基本相同,但結構各有不同。取款機的邏輯非常簡單,前面板也沒有美化,只是實現了邏輯。附件提供給大家,希望和大家一起討論學習。
2017-08-01 16:25:25
狀態機是邏輯設計的重要內容,狀態機的設計水平直接反應工程師的功底。
2012-03-12 16:30:24
一篇經典文獻,詳細講解了一段、兩段、三段式狀態機的實現,效率、優缺點。看完后相信會對狀態機有一個詳細的了解。 狀態機是邏輯設計的重要內容,狀態機的設計水平直接反應工程師的邏輯功底,所以許 多公司
2011-10-24 11:43:11
; elseout=0;endendmodule在進行門級仿真的時候波形中出現了毛刺,也就是所謂的競爭冒險,如下圖書上也有競爭冒險的解決辦法,但具體到代碼里還是不會,誰能教教我該怎么改這個代碼才能消除競爭冒險?
2011-10-21 14:31:40
在實際的應用中,根據有限狀態機是否使用輸入信號,設計人員經常將其分為Moore型有限狀態機和Mealy型有限狀態機兩種類型。
2020-04-06 09:00:21
不僅便于閱讀、理解、維護,而且利于綜合器優化代碼,利于用戶添加合適的時序約束條件,利于布局布線器實現設計。在兩段式描述中,當前狀態的輸出用組合邏輯實現,可能存在競爭和冒險,產生毛刺。則要求對狀態機
2014-09-25 09:35:29
問題。
競爭冒險:在組合電路中,當邏輯門有兩個互補輸入信號同時向相反狀態變化時,輸出端可能產生過渡干擾脈沖的現象,稱為競爭冒險。
那么 FPGA 產生競爭冒險的原因是什么呢?
信號在
2023-05-30 17:15:28
問個關于狀態機的問題,書上說的三段式狀態機的第三段,同步時序的狀態輸出部分的狀態到底是當前態還是次態啊?有的書寫的是次態,case(next_state),有的寫的是case(cur_state)。
2014-09-22 20:42:17
應用LabView做的連接mdb數據庫,應用隊列狀態機
2016-02-05 22:58:25
如何寫好狀態機:狀態機是邏輯設計的重要內容,狀態機的設計水平直接反應工程師的邏輯功底,所以許多公司的硬件和邏輯工程師面試中,狀態機設計幾乎是必選題目。本章在引入
2009-06-14 19:24:49 96
96 狀態機舉例
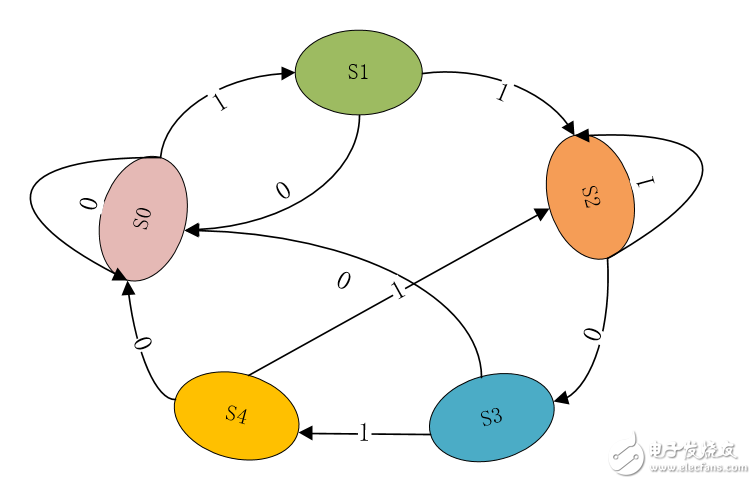
你可以指定狀態寄存器和狀態機的狀態。以下是一個有四種狀態的普通狀態機。 // These are the symbolic names for states// 定義狀態的符號名稱parameter [1
2009-03-28 15:18:28893 第二十一講 組合邏輯電路中的競爭冒險
6.7.1 競爭冒險現象及其產生的原因一、競爭、冒險1.理想情況2.實際情況3.競
2009-03-30 16:25:352728 
組合邏輯中的競爭與冒險及毛刺的處理方法 在組合邏輯中,由于門的輸入信號通路中經過了不同的延時,導致到達該門的時間不一致叫競爭。產生毛刺叫冒險。如果布爾式中有相反的信號則可能產生競爭和冒險現象。解決方法:一是添加布爾式的(冗余)消去項,但是不
2011-01-24 18:12:530 狀態機代碼生成工具狀態機代碼生成工具狀態機代碼生成工具狀態機代碼生成工具
2015-11-19 15:12:169 狀態機原理及用法狀態機原理及用法狀態機原理及用法
2016-03-15 15:25:490 。其只有外部硬件復位采用異步方式,其余信號均用全局時鐘進行同步。把狀態機邏輯和算術邏輯及數據通道分開,把狀態機純粹當作控制邏輯電路來使用,從而改善其性能。
2016-03-22 16:03:0312 組合邏輯中的競爭與冒險及毛刺的處理方法
2017-01-17 19:54:247 練習九.利用狀態機的嵌套實現層次結構化設計目的:1.運用主狀態機與子狀態機產生層次化的邏輯設計;
2017-02-11 05:52:503126 
有限狀態機(FSM)是一種常見的電路,由時序電路和組合電路組成。設計有限狀態機的第一步是確定采用Moore狀態機還是采用Mealy狀態機。
2017-02-11 13:51:403881 
三段式結構中,2個時序always塊分別用來描述現態邏輯轉移,及輸出賦值。組合always塊用于描述狀態轉移的條件。這種結構是寄存器輸出,輸出無毛刺,而且代碼更清晰易讀,特別是對于復雜的狀態機來說,但是消耗的面積也更多點。這是一種比較流行的狀態機結構。
2017-09-16 09:04:545 寄存器存儲狀態信息、組合邏輯產生下一個狀態和輸出值時,大量使用了FPGA的布線、查找表、寄存器等寶貴資源。
為了實現FPGA的可編程性,在其內部使用了大量的可編程邏輯開關。由于可編程邏輯開關
2017-11-17 02:30:073184 
如何使用QII狀態機向導創建一個狀態機
2018-06-20 00:11:003940 
本篇文章包括狀態機的基本概述以及通過簡單的實例理解狀態機
2019-01-02 18:03:319928 
狀態機由狀態寄存器和組合邏輯電路構成,能夠根據控制信號按照預先設定的狀態進行狀態轉移,是協調相關信號動作,完成特定操作的控制中心。狀態機分為摩爾(Moore)型狀態機和米莉(Mealy)型狀態機。
2019-09-19 07:00:002178 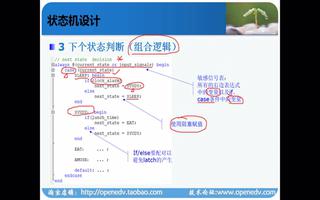
狀態機由狀態寄存器和組合邏輯電路構成,能夠根據控制信號按照預先設定的狀態進行狀態轉移,是協調相關信號動作,完成特定操作的控制中心。狀態機分為摩爾(Moore)型狀態機和米莉(Mealy)型狀態機。
2019-10-09 07:07:003198 狀態機由狀態寄存器和組合邏輯電路構成,能夠根據控制信號按照預先設定的狀態進行狀態轉移,是協調相關信號動作、完成特定操作的控制中心。
2019-10-09 07:06:002234 狀態機由狀態寄存器和組合邏輯電路構成,能夠根據控制信號按照預先設定的狀態進行狀態轉移,是協調相關信號動作、完成特定操作的控制中心。
2019-12-04 07:03:002880 
狀態機由狀態寄存器和組合邏輯電路構成,能夠根據控制信號按照預先設定的狀態進行狀態轉移,是協調相關信號動作、完成特定操作的控制中心。
2019-10-09 07:02:002137 狀態機由狀態寄存器和組合邏輯電路構成,能夠根據控制信號按照預先設定的狀態進行狀態轉移,是協調相關信號動作,完成特定操作的控制中心。狀態機分為摩爾(Moore)型狀態機和米莉(Mealy)型狀態機。
2019-05-28 07:03:492648 簡言之:在組合邏輯中,由于門的輸入信號通路中經過了不同的延時,導致到達該門的時間不一致叫競爭,競爭產生冒險。
2020-06-26 06:38:0016665 狀態機 1、狀態機是許多數字系統的核心部件,是一類重要的時序邏輯電路。通常包括三個部分:一是下一個狀態的邏輯電路,二是存儲狀態機當前狀態的時序邏輯電路,三是輸出組合邏輯電路。 2、根據狀態機的輸出
2020-11-16 17:39:0024811 是FPGA設計中一種非常重要、非常根基的設計思想,堪稱FPGA的靈魂,貫穿FPGA設計的始終。 02. 狀態機簡介 什么是狀態機:狀態機通過不同的狀態遷移來完成特定的邏輯操作(時序操作)狀態機是許多數字系統的核心部件, 是一類重要的時序邏輯電路。通常包括三個部分: 下一個
2020-11-05 17:58:476145 
狀態機是邏輯單元、存儲器單元和反饋的組合。狀態機的輸入與狀態機的當前狀態組合在一起,確定下一個狀態。當出現狀態時鐘時,下一個狀態成為當前狀態,狀態機的輸出由當前狀態決定。
2021-03-30 15:58:147 Synplify的優勢之一是有限狀態機編譯器。 這是一個強大的功能,不僅具有自動檢測狀態機中的狀態的能力源代碼,并使用順序編碼,灰色編碼或一鍵編碼實現它們。但也要進行可達性分析,以確定所有可能的狀態達到并優化掉所有無法達到的狀態和轉換邏輯。因此,產生狀態機的高度優化的最終實現。
2021-04-07 09:20:5112 競爭現象的組合電路中,當某個變量發生變化的時候,比如說從 1 跳到 0,或者說從 0 跳到 1,如果真值表所描述的邏輯關系或者功能遭受到短暫的破壞,在輸出端出現一個不應有的尖脈沖?毛刺,這種現象就叫?冒險。 冒險是由競爭造成的,
2021-06-13 16:56:0015806 “本文主要分享了在Verilog設計過程中狀態機的一些設計方法。 關于狀態機 狀態機本質是對具有邏輯順序或時序順序事件的一種描述方法,也就是說具有邏輯順序和時序規律的事情都適用狀態機描述。狀態機
2021-06-25 11:04:432249 玩單片機還可以,各個外設也都會驅動,但是如果讓你完整的寫一套代碼時,卻無邏輯與框架可言。這說明編程還處于比較低的水平,你需要學會一種好的編程框架或者一種編程思想!比如模塊化編程、狀態機編程、分層思想
2021-07-27 11:23:2219223 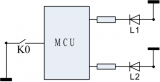
1. 前言 在數字電路課程中,老師在講組合邏輯的時候,一般都會講競爭與冒險。sky當時也聽的云里霧里,沒有想清楚如下問題: 1) 競爭與冒險究竟是什么東西?有啥物理現象? 2) 在數
2021-08-09 14:43:082657 
以前寫狀態機,比較常用的方式是用 if-else 或 switch-case,高級的一點是函數指針列表。最近,看了一文章《c語言設計模式–狀態模式(狀態機)》(來源:embed linux
2021-12-16 16:53:047 今天還是更新狀態機,狀態機基本是整個HDL中的核心,合理、高效地使用狀態機,是數字電路中的重要技能。
2023-02-12 10:21:05542 有限狀態機是由寄存器組和組合邏輯構成的硬件時序電路,其狀態(即由寄存器組的1和0的組合狀態所構成的有限個狀態)只可能在同一時鐘跳變沿的情況下才能從一個狀態轉向另一個狀態,究竟轉向哪一狀態還是留在原狀態不但取決于各個輸入值,還取決于當前所在狀態。這里是指Mealy型有限狀態機。
2023-04-07 09:52:46909 和序列要求的最佳方法則是使用狀態機。狀態機是在數量有限的狀態之間進行轉換的邏輯結構。一個狀態機在某個特定的時間點只處于一種狀態。但在一系列觸發器的觸發下,將在不同狀態間進行轉換。理論上講,狀態機可以分為Moore 狀態機和Mealy 狀態機
2023-07-18 16:05:01499 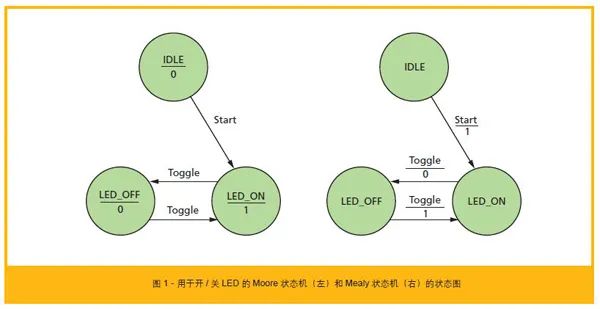
本身相關的那些處理邏輯。在FSME中,與具體應用相關的操作稱為輸出(Output),它們實際上就是一些需要用戶給出具體實現的虛函數,自動生成的狀態機引擎負責在進入或者退出某個狀態時調用它們。 仍然以控制城門的那個狀態機為例
2023-09-13 16:57:37821 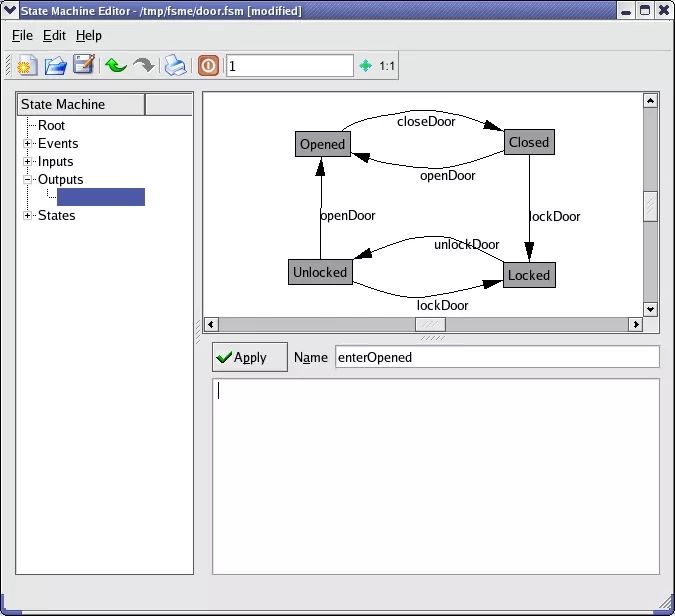
門電路的兩個輸入信號同時向相反的邏輯電平跳變的現象叫做 競爭 ,這種競爭可能在電路的輸出端產生尖峰脈沖,這種現象稱為 競爭冒險 。
2023-09-25 11:50:451080 
狀態機,又稱有限狀態機(Finite State Machine,FSM)或米利狀態機(Mealy Machine),是一種描述系統狀態變化的模型。在芯片設計中,狀態機被廣泛應用于各種場景,如CPU指令集、內存控制器、總線控制器等。
2023-10-19 10:27:553405
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論