 電子發燒友App
電子發燒友App


引言
Internet 的快速發展和成功促進了以太網(Ethernet)技術的發展和應用的擴展,所涉及的領域十分廣泛,如傳統的工業控制、信息家電、智能家居、安全監控、樓宇自動化、醫療、環境監測等。大多數的數據采集設備的通信接口符合 UART 通信標準。這種通信方式的數據傳輸半徑十分有限,并不能滿足遠距離傳輸的需求,并且不能接入 Internet. 因此數據的交互接入 Internet 就顯得非常重要了。
1、系統的總體方案及各主要模塊設計
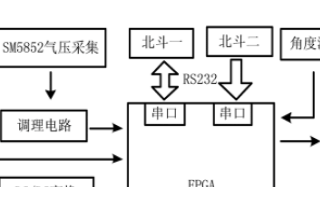
系統以 Microsemi(Actel)公司的基于 FLASH 架構的 SoC FPGA 產品 Smart Fusion2 器件為核心。系統通過 Fabric 架構實現多路 UART 對外相應數據進行采集,進行并 / 串轉換寫入 Fabric 的雙端口 RAM.SmartFusion2 的 ARM Cortex-M3 子系統經過 AHB/APB 總線矩陣以 AHB/APB 方式訪問 Fabric 的 RAM,將得到的數據經過 Ethernet 以網頁的形式在 PC 上顯示。反之,以同樣的路徑將主控的指令傳輸到外部的終端設備。PC 機端以網頁形式實現數據交互。網頁存放于 SmartFusion2 內部 FLASH,內核 Cortex-M3 基于實時操作系統(FreeRTOS)管理任務,IP 采用靜態方式,內核 Cortex-M3 與 Fabric 采用 AHB 方式通信 . 系統設計結構框圖如圖 1 所示。

圖 1 系統設計結構框圖
系統硬件的設計可分為三個主要模塊,分別為 PHY 物理層模塊,SoC 的 Cortex-M3 內核及 FPGA 系統,UART 模塊的數據采集系統。
?
1.1 PHY 模塊
PHY 即物理層(Physical Layer)。物理層協議可定義電氣信號標準、連線的狀態、時鐘信號的要求、數據編碼的格式和數據傳輸所用的連接器等。物理層通過一個定義好的接口與數據鏈路層進行通信。比如 MAC 可以利用標準的介質無關性接口( MII 接口)與 PHY 進行數據交換通信。PHY 還有個重要的功能就是實現以太網的 CSMA/CD 部分功能,這是硬件上實現的。它可以檢測到網絡鏈路上是否有數據正在傳送,如果有數據在傳送中則進行等待,當檢測到網絡空閑,就再等待一定的時間(不同的 PHY 會有不同)后對數據進行傳送。倘若兩塊網卡碰巧是同時發送數據,這將造成沖突,這時 PHY 內部的沖突檢測結構可以檢測到沖突的發生,然后兩邊各自等待一定的時間進行重發數據。

圖 2 PHY 電路連接圖
PHY 的電路圖連接圖如圖 2 所示。KSZ8051 采用 MII 與 SmartFusion2 相連,由于 MII 兼容 RMII 接口,因此程序也可配置為 RMII 模式。Management 采用 2 個引腳連接,分別為 MDC 和 MDIO,MII 的時鐘由 PHYKSZ8051 提供,KSZ8051 的時鐘來自外部 25 MHz 晶振。媒體連接采用 RJ 45,兼容 10 Mb/s 和 100 Mb/s.
?
1.2 SoC 中的 Cortex-M3 模塊
系統使用 Cortex-M3 中的 MAC 模塊,如圖 3 所示。
?
通過 AHB 控制 Ethernet MAC 模塊,對于 MAC 的配置是使用其內部的寄存器,可以配置不同的接口模式,不同的速度。本系統配置為 MII 接口,100 Mb/s 速度。

圖 3 Cortex-M3 的 MAC
MAC(Media Access Control,媒體訪問控制子層協議),主要負責控制和連接物理層。在發送數據的時候,MAC 協議可以事先判斷現在是否可以發送數據,如果可以發送則將給數據加上一些控制信息,最終將數據及附帶的控制信息以規定的格式發送到物理層;在接收數據的時候,MAC 協議首先判斷輸入的信息是否發生傳輸錯誤,如果沒有錯誤,則去掉控制信息發送至邏輯鏈路層(LLC)層。以太網 MAC 協議由 IEEE 802.3 以太網標準定義。
?
PHY 與 MAC 的接口方式有多種,如:
?
MII,RMII,SMII,SSMII,GMII,SGMII,TBI 等。目前常見的 PHY 都提供標準的 MII 接口,RMII 信號是對 PHY 內部的 MII 的信號進行編碼和解碼,這就是說支持 MII 接口的 PHY 內部都含有 RMII 信號,也就是支持 RMII 接口。具體使用何種接口的 PHY 則必須根據 MAC 芯片對應的功能和接口的標準來決定。
?
采用 FreeRTOS 實時操作系統管理整個系統的運行。FreeRTOS 使用 Cortex-M3 內核的定時器以 10 ms 時間片進行任務的調度和切換。創建 WebServer 進程和網頁進行通信,網頁編輯語言 HTML 是不需要編譯的,因此將需要顯示的數據全部發送給網頁。這些數據存儲在 FLASH 中,目前測試是存儲在片內 FLASH,網頁發來的控制數據進行實時的處理。網頁的數據需要用 LwIP 協議棧進行打包,LwIP 協議棧是把所有的協議封裝到一個單一的過程(進程)中,從而與操作系統內核分開。應用程序可能也駐留在 LwIP 處理過程中,或者在單獨的過程中。TCP/IP 棧和應用程序之間的通信可以通過函數調用實現,也可以通過更為抽象的 API[4-5]. 本設計的應用層使用常用的 IPv4 協議,DHCP 和靜態 IP 都進行測試,傳輸層和網絡層使用 TCP/IP.
?
打包之后的需要介質層 MAC 進行處理,此 MAC 為 Cortex-M3 內核自帶的,支持多種 MAC 接口,本設計采用 MII 接口,所采用的 PHY 芯片也是 MII 接口,采用 Micrel 公司的 KSZ8051,支持 MII、RMII 接口,10 Mb/s 和 100Mb/s 傳輸速度,設計時采用 100Mb/s 傳輸。
?
網頁的數據需要實時更新,設計網頁每隔 500 ms 發一次更新的命令,Cortex- M3 再將更新的數據發送給網頁。而這些數據來自 APB3 上,Cortex-M3 通過 FIC_0 和 APB3 進行雙向通信,從而發送和接收數據。FPGA 中 Fabric 和 APB3 進行雙向通信,數據存儲在雙端口 SRAM 中,多路 UART 和 SRAM 進行雙向通信。SRAM 在系統起緩存的作用,用來解決兩端讀寫速度的不同。
?
而對于 UART 的數據也定義了協議,這些協議是區分數據的格式和內容。對于 UART 的個數可以進行增加,系統 UART 的同步使用 FPGA 硬件實現,不受個數的限制。
?
1.3 FPGA 的 UART 模塊
本系統的主要功能是 UART 數據的采集與交互,使用網頁進行人機交換,實現數據的實時更新和控制,并且把采樣點的采樣時間也傳輸過去,使用戶知道數據的具體時間,便于以后的查看。
?
在本設計中需要在 SmartFusion2 片內的 FPGA 部分設計多路串口數據采集與存儲的控制器,實現對終端的多路串口數據進行采集。使用的多路串口數據采集方法是在 SmartFusion2 片內的 FPGA 中設計一個 UART 控制器去采集多路數據[6]. 控制器并不完成串轉并控制,而是實時監測多路串口數據狀態,并將多路串行數據實時切換送入 RAM 控制器,串行的數據經過 RAM 控制器串行的進入 RAM 中去。如圖 4 所示。
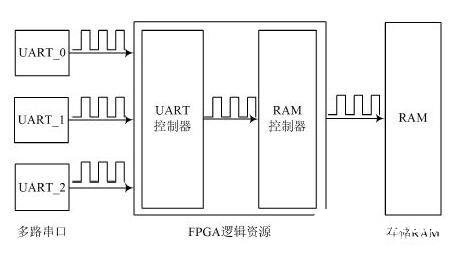
圖 4 串口復用數據采集
當多路串口中任何一路,任何時候到來數據的時候,UART 控制器都能感知這次串行數據,并開通相應的信道,將某一路的串口數據送到 RAM 控制器。然后 RAM 控制器將該信道的串行數據寫入 RAM 中。這樣就可以完成對多路串口數據的采集工作。
?
在該方案中,需要在 SmartFusion2 片上的 FPGA 內設計一個 UART 控制器作為查詢機制中的主機,各個終端串口作為從機,提供串口數據。主機會定時的在 SEL 總線上發出從機的片選信號,用于選通從機設備。當從機被選中之后,從機自己會做出判斷,如果該從機有數據需要發送,則該從機立刻將串行的數據發出。如果從機沒有數據需要發送,則從機對該選擇信號 SEL 不做任何反應,定時時間到,主機會自動的去選通下一路從機,從機工作原理與之類似。這樣的做法同樣可以完成對多路串口數據的采集工作。
?
2、系統軟件設計
本設計采用 FreeRTOS 操作系統,通過創建 WebServer 進程實現數據的交互。在初始化完成后,執行 WebServer 進程,WebServer 進程發送網頁的數據、更新網頁的數據、得到采集的數據。而關于以太網的協議則使用 LwIP 協議棧實現。對于硬件層則使用 Cortex-M3 內部的 MAC 和外部的 PHY 進行傳輸。實現物理層的傳輸[7]. 因此本設計的思路是發送接收數據給網頁和接收發送 APB3 上對應的地址的數據。將 UART 的數據格式和網頁 HTTP 數據格式互換。
?
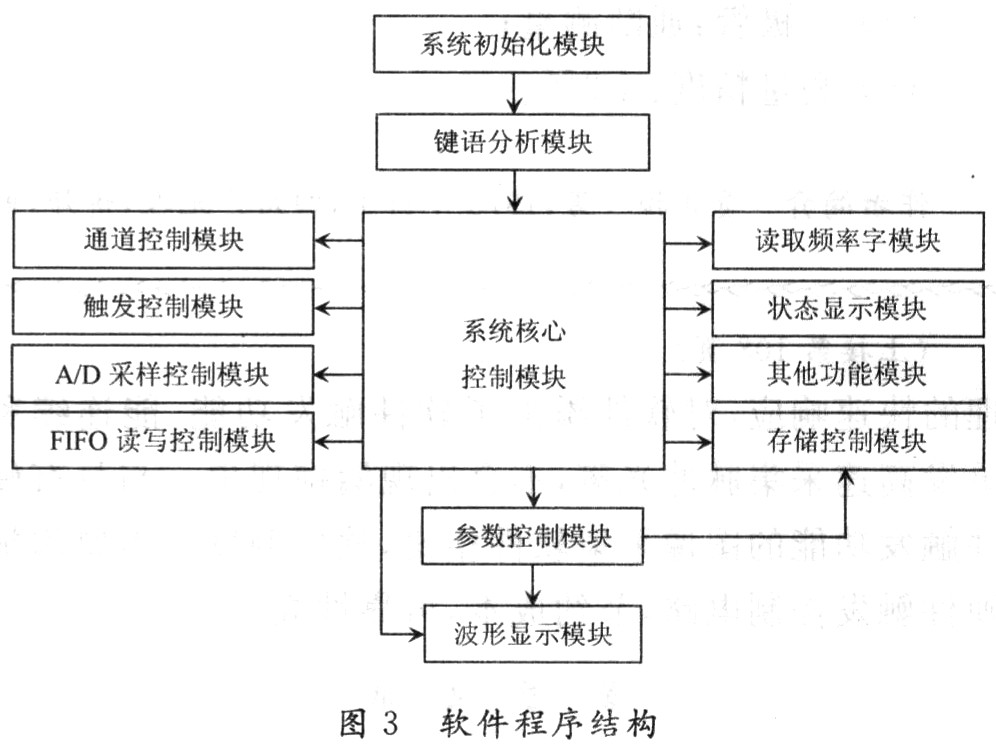
軟件設計框圖如圖 5 所示,WebServer 進程和網頁進行通信,通信的協議采用 LwIP 協議,對于 LwIP 協議使用其中的 IPv4 應用層,使用 TCP/IP 傳輸,DHCP 動態獲取 IP,數據鏈路層使用內部的 MAC,采用 100 Mb/s 的 MII 接口和 PHY 通信,PHY 在物理層上和 PC 機通信[8].
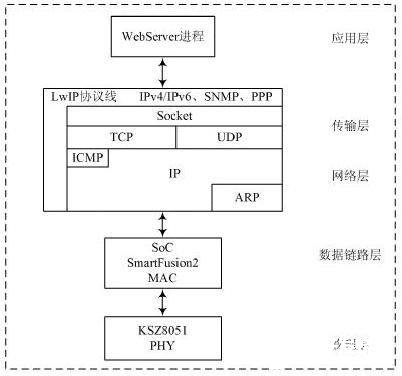
圖 5 軟件設計框圖
采用自動連接的方式與以太網相連,對于 HTTP 數據采用監聽的方式,有 HTTP 數據則執行相應的操作。在網頁上顯示實時的日期和時間,這個日期和時間不是來自 PC 機的,而是來自 SmartFusion2 的,能夠達到顯示數據的采樣時間,方便用戶查看和保存帶有時間的數據。
?
以太網的初始化首先是 MAC 的初始化,將 MAC 初始化為 MII 接口,半字節,100 Mb/s 模式。MAC 初始化后就是對于協議的選擇,本系統選擇 TCP/IP 協議,通過 tcpip_input 調用初始化網絡的配置。對于網絡的配置,首先是 MAC 地址、IP 地址、網關、子網掩碼的配置(如果為 DHCP 則只有 MAC 地址有效),可以配置為靜態 IP 和 DHCP 兩種模式。靜態 IP 使用 netif_set_up 函數,DHCP 使用 dhcp_star 函數來開始。
?
WebServer 是系統的主任務,負責網頁和 APB3 上數據的交互。首先是使用 netconn_bind 函數新建一個 80 端口(HTTP)的網絡,建立好后就一直處于監聽狀態的 netconn_listen 函數。
?
有網絡連接時則發送相應的數據。如果有網頁打開數據的請求,則開始發送網頁的數據頭和主界面的數據,同時將網頁的運行的程序也發送過去,這樣內核就可以方便和網頁進行通信。
?
對于網頁的刷新和數據請求命令都是已經發送給網頁了,如果有網頁的刷新請求則將更新的檢測數據和日期時間數據發送給網頁。有點擊控制命令,處理器則馬上響應,將控制命令轉換并發送給 APB3,也就發送給了 UART. 當然,這里面所有的數據都是加了相應的通信協議。
?
如發送數據給網頁時則需要使用 netconn_write 函數,首先是網頁數據頭,然后是相應的數據。如果無網絡連接、無網頁請求、請求完成等都是使用 netconn_close 函數關閉網絡,使用 netbuf_delete 函數刪除網絡,然后又去監聽是否有新的網絡存在并連接。

圖 6 軟件設計流程圖
以智能家居數據采集與交互為例,系統軟件設置流程圖如圖 6 所示,首先是時鐘和外設的初始化,再是以太網相關的初始化,包括 MAC 和 PHY 的初始化,IP 的獲取方式,設置 MAC 地址、IP 地址、子網掩碼、網關,設置傳輸的協議等。硬件層、傳輸層設置以后就是應用層,創建 WebServer 應用程序。此應用程序也是主應用程序,在 FreeRTOS 中的優先級是最高的,堆棧大小也是最大的。WebServer 任務就是與網頁通信,實現網頁的刷新。任務的調度和切換時通過定時器實現,10 ms 為一個時間片,調度函數為 vTaskStartScheduler 函數實現。
?
3、結語
本文利用源代碼開放的 TCP/IP 協議棧 LwIP 和簡單實用的操作系統 FreeRTOS 軟件平臺和 SmartFusion2 的硬件平臺構建了基于 SoC 的數據采集與交互系統,完成設備數據信息的采集及處理并實現遠程數據交流與共享。通過實際運行測試,系統性能穩定可靠,具有一定推廣使用價值。










 工商網監
工商網監
評論