 電子發(fā)燒友App
電子發(fā)燒友App


從微控制器到執(zhí)行器——電機(jī)驅(qū)動(dòng)器應(yīng)用的集成方案
目前,步進(jìn)電機(jī)出現(xiàn)在很多應(yīng)用場(chǎng)合,也將繼續(xù)被追求高精度定位的設(shè)計(jì)人員所選擇。與此同時(shí),其高能效、高性能及逐漸縮小的尺寸等特性,使其對(duì)從劑量泵到執(zhí)行器、閥及監(jiān)控相機(jī)等設(shè)備的吸引力日增。業(yè)界還探尋到更多的應(yīng)用空間,如汽車前照燈及舞臺(tái)照明定位等動(dòng)態(tài)應(yīng)用,而且它們的增強(qiáng)型加速能力,也將在貼片機(jī)、縫紉機(jī)等制造設(shè)備中發(fā)揮作用。
控制策略
雖然大多數(shù)步進(jìn)電機(jī)被用于開(kāi)環(huán)模式,但現(xiàn)代的許多設(shè)計(jì)卻使用閉環(huán)控制技術(shù)。后者的優(yōu)勢(shì)在于,維持轉(zhuǎn)子真實(shí)位置與根據(jù)電氣驅(qū)動(dòng)信號(hào)得到的預(yù)計(jì)位置之間的關(guān)聯(lián),從而在保持精度的同時(shí)允許更快速的轉(zhuǎn)動(dòng)。
傳統(tǒng)上,閉環(huán)系統(tǒng)一直使用傳感器或編碼器就轉(zhuǎn)子位置向驅(qū)動(dòng)器電路提供反饋信息,從而產(chǎn)生實(shí)際位置與預(yù)計(jì)(“電氣”)位置之間的關(guān)聯(lián)。這樣的反饋不僅能更好地控制驅(qū)動(dòng)電流以產(chǎn)生所需的加速度及轉(zhuǎn)矩,還能夠提供失速檢測(cè)能力,從而消除失步。
在實(shí)現(xiàn)基于傳感器的控制時(shí),最常見(jiàn)的方法是使用霍爾傳感器,盡管也會(huì)有其他選擇,如在轉(zhuǎn)子軸上貼裝光學(xué)編碼及電位計(jì)等。最近,無(wú)傳感器的閉環(huán)設(shè)計(jì)已經(jīng)面世。這些設(shè)計(jì)感測(cè)實(shí)際驅(qū)動(dòng)電流及轉(zhuǎn)子運(yùn)動(dòng)產(chǎn)生的反電動(dòng)勢(shì),來(lái)計(jì)算轉(zhuǎn)子的機(jī)械位置。
ASSP幫助實(shí)現(xiàn)步進(jìn)電機(jī)控制
隨著控制算法及驅(qū)動(dòng)電路的演變,器件制造商不斷開(kāi)發(fā)日益復(fù)雜的芯片來(lái)應(yīng)對(duì)電機(jī)設(shè)計(jì)所遇到的諸多繁雜工作。例如安森美半導(dǎo)體AMIS-305xx系列等ASSP產(chǎn)品就集成了轉(zhuǎn)換器,將連續(xù)的步長(zhǎng)轉(zhuǎn)換為所需的線圈電流(可通過(guò)查找表或其他方式)。該系列還集成了采用H橋配置的驅(qū)動(dòng)器晶體管、flyback二極管、經(jīng)PWM的片上穩(wěn)流,以及多種保護(hù)電路。
這樣做的最終結(jié)果,是單顆芯片就能夠直接驅(qū)動(dòng)步進(jìn)電機(jī)。此類芯片通過(guò)如SPI總線等邏輯型接口接收到高層“下一步”位置指令,從而進(jìn)行啟動(dòng)。它們還完整實(shí)現(xiàn)了微步(micro-stepping),不僅大幅提高精度,還在低速率時(shí)提升轉(zhuǎn)矩,降低可聽(tīng)噪聲,并消除步損(step loss)。
此類ASSP分為兩個(gè)寬泛的類別,典型代表是AMIS-305xx和AMIS-306xx系列。后者更進(jìn)一步提供完全集成的解決方案,通過(guò)I2C或LIN接口接收高層指令。控制算法以狀態(tài)機(jī)的形式集成在IC內(nèi),設(shè)計(jì)人員只需簡(jiǎn)單提供輸入,“告知”AMIS-306xx使用期望的微步大小按規(guī)定的加速度和最大速度將電機(jī)轉(zhuǎn)動(dòng)至某特定位置。
這樣的方案非常適合于定位監(jiān)控相機(jī)等應(yīng)用。工程師需要盡快構(gòu)建施工設(shè)計(jì)。設(shè)計(jì)人員不必?fù)?dān)心運(yùn)動(dòng)算法中的動(dòng)力學(xué)設(shè)計(jì),因?yàn)檫@些已嵌入在ASSP中。他們只需設(shè)計(jì)電機(jī)的總體運(yùn)動(dòng),而相關(guān)IC可以實(shí)現(xiàn)如無(wú)傳感器失速檢測(cè)等先進(jìn)特性,從而更進(jìn)一步簡(jiǎn)化設(shè)計(jì)人員工作。
多芯片方法帶來(lái)的優(yōu)勢(shì)
雖然類似AMIS-305xx這樣的器件犧牲了如AMIS-306xx等turnkey方案中的一些特性及上市時(shí)間優(yōu)勢(shì),但是設(shè)計(jì)人員卻能夠更加精細(xì)地控制系統(tǒng)的動(dòng)態(tài)行為。使用此類智能驅(qū)動(dòng)器的設(shè)計(jì)人員采用更加傳統(tǒng)的控制電路架構(gòu),用MCU或DSP運(yùn)行控制軟件并產(chǎn)生“下一(微)步”脈沖。
這個(gè)脈沖信號(hào)充當(dāng)驅(qū)動(dòng)器IC本身的輸入。可以使用一個(gè)額外的SPI接口來(lái)規(guī)定電流幅值、步進(jìn)模式、PWM頻率等參數(shù)。反過(guò)來(lái),該智能驅(qū)動(dòng)器通常會(huì)反向提供狀態(tài)標(biāo)記、開(kāi)路及短路警示等信息給控制器。
為了削減基于傳感器方案的BOM成本及設(shè)計(jì)復(fù)雜度,該驅(qū)動(dòng)器通常也會(huì)提供足夠的反饋來(lái)實(shí)現(xiàn)閉環(huán)控制,從而也減少了外部傳感器電路的復(fù)雜性及BOM成本。AMIS-306xx系列器件中,該反饋限制在運(yùn)轉(zhuǎn)良好的失速檢測(cè)信號(hào),從內(nèi)部向集成狀態(tài)機(jī)提供。但在AMIS-305xx系列中,反饋通過(guò)速度及負(fù)載角(SLA)輸出引腳外部提供。這就讓設(shè)計(jì)人員能夠直接獲得電機(jī)線圈通過(guò)轉(zhuǎn)子磁極時(shí)線圈中感應(yīng)的反電動(dòng)勢(shì)的測(cè)量方法。
從外部獲得反電動(dòng)勢(shì)的測(cè)量方法為設(shè)計(jì)人員改進(jìn)電機(jī)設(shè)計(jì)提供了各種可能性。因?yàn)樵试S設(shè)計(jì)人員獲悉轉(zhuǎn)子位置及速度,當(dāng)然也允許MCU在轉(zhuǎn)子電氣位置與預(yù)計(jì)位置之間進(jìn)行比較。
最為簡(jiǎn)單的應(yīng)用是實(shí)現(xiàn)失速檢測(cè)。然而,也可以動(dòng)態(tài)監(jiān)測(cè)反電動(dòng)勢(shì),產(chǎn)生實(shí)際位置與預(yù)計(jì)位置之間的實(shí)時(shí)比較。因此,其能夠讓電路“獲悉”什么時(shí)候可能會(huì)面臨失步并采取措施。此外,實(shí)際位置與預(yù)計(jì)位置之差也為電機(jī)所用轉(zhuǎn)矩提供了指示。
實(shí)際上,隨著電機(jī)上的機(jī)械負(fù)載增加,反電動(dòng)勢(shì)與電機(jī)線圈電流之間的相位差也隨之增加——這就是所謂的負(fù)載角。如果轉(zhuǎn)子上的機(jī)械負(fù)載增加,同步采樣反電動(dòng)勢(shì)會(huì)產(chǎn)生連續(xù)減小的結(jié)果。這就提供了實(shí)現(xiàn)復(fù)雜轉(zhuǎn)矩控制算法的可能性。
診斷窗口
或許最重要的是:這種現(xiàn)象在驅(qū)動(dòng)器、電機(jī)和所用負(fù)載完整合并的運(yùn)作中提供了一個(gè)診斷“窗口”。這對(duì)設(shè)計(jì)人員來(lái)說(shuō)意義深遠(yuǎn),從選擇恰當(dāng)?shù)碾姍C(jī),自始至終將簡(jiǎn)化貫穿設(shè)計(jì)實(shí)現(xiàn),再到最終達(dá)到高質(zhì)量及精密性。
對(duì)于設(shè)計(jì)人員而言,反電動(dòng)勢(shì)測(cè)量的第一個(gè)應(yīng)用可能是電機(jī)的自身選擇,因?yàn)槟軌蚴褂酶牧嫉目刂撇呗詠?lái)拓寬電機(jī)的工作限制。電機(jī)通常采用轉(zhuǎn)矩與速率曲線對(duì)比進(jìn)行表征,該曲線會(huì)給出一個(gè)上限速度,超過(guò)了它電機(jī)就不能使用。然而,運(yùn)行電機(jī)行為的特性并通過(guò)查看SLA輸出推斷出電機(jī)提供的轉(zhuǎn)矩,可能會(huì)展示出更加微妙的局面。
一般情況下,電機(jī)會(huì)指定用于整步(full-step)模式。隨著速度增加,當(dāng)?shù)竭_(dá)某個(gè)點(diǎn)時(shí),電機(jī)轉(zhuǎn)矩會(huì)急劇下降。這通常就是截止(cut-off)點(diǎn),電機(jī)制造商建議用戶使用其產(chǎn)品時(shí)不要高于該速度。然而,如果電機(jī)采用相同的速度但使用了微步模式,轉(zhuǎn)矩下降可能壓根就不是一個(gè)大問(wèn)題。隨著速度進(jìn)一步增加,整步轉(zhuǎn)矩返回到了在較低頻率下就可獲得的數(shù)值并不稀奇。速率與轉(zhuǎn)矩曲線的對(duì)比,看上去更像是“notch”函數(shù),而非“低通”函數(shù)(見(jiàn)圖1)。通常notch是由振蕩引起的。
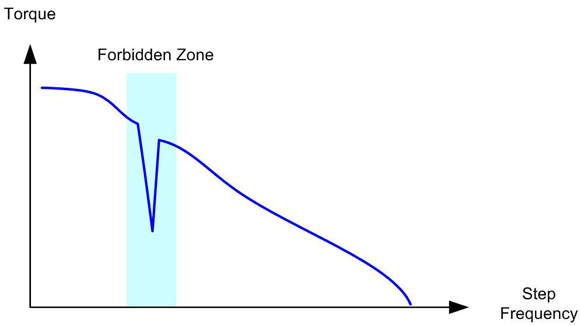
圖1
在電機(jī)上運(yùn)行正特性允許設(shè)計(jì)人員實(shí)現(xiàn)這樣的控制算法:在極低和極高速度下使用整步模式,并在測(cè)量到速度值處于中間范圍(較窄)時(shí)切換至微步模式。這樣的操作不僅對(duì)設(shè)計(jì)系統(tǒng)級(jí)方案的終端用戶有用,還使智能電機(jī)(帶內(nèi)置驅(qū)動(dòng)器電路)制造商能夠充分?jǐn)U展其產(chǎn)品的特定范圍。就安森美半導(dǎo)體而言,我們已經(jīng)發(fā)現(xiàn)這些改進(jìn)能將電機(jī)的有效速度范圍擴(kuò)充多達(dá)2或3倍。
通過(guò)智能驅(qū)動(dòng)器SLA引腳測(cè)量反電動(dòng)勢(shì)也能夠用于終端系統(tǒng)行為的確定,使設(shè)計(jì)人員能夠避免電機(jī)在禁止的共振特征頻率時(shí)工作。這些頻率是整個(gè)電機(jī)-驅(qū)動(dòng)器-負(fù)載系統(tǒng)的特性,因此無(wú)法輕易在數(shù)據(jù)表中看到。然而,監(jiān)控SLA引腳時(shí)還是能夠輕易發(fā)現(xiàn)這些特性,因?yàn)樗鼈儠?huì)在振動(dòng)時(shí)顯現(xiàn)(見(jiàn)圖2)。
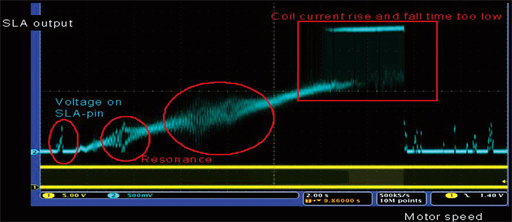
圖2: 監(jiān)控SLA引腳時(shí)發(fā)現(xiàn)的共振特征頻率
這個(gè)問(wèn)題通常利用盡可能快的特征頻率來(lái)加速電機(jī)得以解決,這樣做消除了振動(dòng)危險(xiǎn)。擁有現(xiàn)成的揭示系統(tǒng)危險(xiǎn)速率范圍的診斷方法,能夠讓設(shè)計(jì)人員快速簡(jiǎn)便地精確找出問(wèn)題,并因此大幅縮短上市時(shí)間。某些情況下,新驅(qū)動(dòng)器件的診斷能力使設(shè)計(jì)團(tuán)隊(duì)可完成以前難以解決的項(xiàng)目。
動(dòng)態(tài)轉(zhuǎn)矩控制
內(nèi)置診斷還意味,系統(tǒng)設(shè)計(jì)能夠使電機(jī)提供的轉(zhuǎn)矩適應(yīng)瞬時(shí)需求。這在控制器確定可能即將出現(xiàn)步損的情況下很有用:它通過(guò)提供更大轉(zhuǎn)矩進(jìn)行響應(yīng)。但內(nèi)置診斷更強(qiáng)大的地方,或許是能夠?qū)崿F(xiàn)“自動(dòng)速度”功能。
在這種情況下,MCU要求智能驅(qū)動(dòng)器電路“以可能的最大速度”將電機(jī)帶至期望位置。然后在這個(gè)動(dòng)作期間,使用反電動(dòng)勢(shì)反饋機(jī)制確定是否及何時(shí)采取“下一步”動(dòng)作。
這種方法有雙重優(yōu)勢(shì)。執(zhí)行指定動(dòng)作所需的功率減半,而動(dòng)作發(fā)生所采用的時(shí)間亦減半。這兩個(gè)結(jié)果有關(guān)聯(lián):電機(jī)準(zhǔn)確傳遞適量的瞬時(shí)轉(zhuǎn)矩來(lái)盡可能快地轉(zhuǎn)動(dòng)轉(zhuǎn)子,而且該事實(shí)也表明系統(tǒng)充分利用了提供給它的能量。
這類優(yōu)勢(shì)對(duì)使用步進(jìn)電機(jī)的應(yīng)用極具吸引力,這些應(yīng)用通常高度動(dòng)態(tài)化,但不涉及連續(xù)的動(dòng)作。如貼片設(shè)備這樣的產(chǎn)品需要能夠精確完成突發(fā)動(dòng)作,速度要盡可能地快,而且之后轉(zhuǎn)向“下一個(gè)”設(shè)定點(diǎn)要同樣地快。而且,盡管在大功率應(yīng)用中這些并不常見(jiàn),所以節(jié)能并不具有固有優(yōu)勢(shì),但是,減小功率要求的確帶來(lái)沖擊效應(yīng):有可能將電機(jī)的功率提供量化在更接近于系統(tǒng)額定行為而非其峰值功耗的水平。這通常表示能夠使用70牛米(Nm)的電機(jī)而非100 Nm的電機(jī)。
總結(jié)
在快速、精確及動(dòng)態(tài)的動(dòng)作控制應(yīng)用中,步進(jìn)電機(jī)是越來(lái)越普及的另一選擇。隨著電機(jī)技術(shù)的發(fā)展,智能驅(qū)動(dòng)器/控制器ASSP也涌現(xiàn)出來(lái),且能夠高效地驅(qū)動(dòng)這些電機(jī)。當(dāng)今的器件為設(shè)計(jì)人員提供了以總線控制而工作的整體IC的選擇,也提供了更加靈活的方案,開(kāi)創(chuàng)空間實(shí)踐創(chuàng)新特性,并為這技術(shù)尋獲新的應(yīng)用。
這些ASSP除了提供基于參數(shù)的控制架構(gòu),還能提供系統(tǒng)性能“診斷窗口”,讓工程師能夠快速簡(jiǎn)易地實(shí)現(xiàn)復(fù)雜的電機(jī)系統(tǒng),并解決其中的問(wèn)題。設(shè)計(jì)團(tuán)隊(duì)?wèi){借先進(jìn)的特征能力,能夠解決復(fù)雜的問(wèn)題,加快產(chǎn)品上市 ,并提供高產(chǎn)品質(zhì)量。
為持續(xù)創(chuàng)新,設(shè)計(jì)人員會(huì)繼續(xù)要求整體IC與多芯片方案組合,讓他們能夠在有需要時(shí)解決新應(yīng)用中的復(fù)雜問(wèn)題快,速及高性價(jià)比地實(shí)施。可以確定的是,步進(jìn)電機(jī)及復(fù)雜“機(jī)電設(shè)備”的應(yīng)用范圍將不斷擴(kuò)展。
?










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論