 電子發燒友App
電子發燒友App


TMS320F2812是TI公司推出的一款用于控制系統的高性能、多功能、高性價比的32位定點DSP芯片。TMS320F2812采用哈佛總線結構,具有密碼保護機制,可在一個周期內進行雙16×16乘加和32×32乘加操作,從而兼顧控制和快速運算的雙重功能;芯片上集成了多種外設,尤其是2個事件管理器為電動機以及功率變換控制提供了很大的便利,因此在控制系統中得到了很廣泛的應用。下面以Microchip公司的EEPROM 25LC040為例,介紹TMS320F2812的SPI接口設計。
1 主要芯片簡介
1.1TMS320F2812 SPI模塊
SPI總線是一種同步串行外設接口,它可以使控制芯片以串行方式與各種外圍設備進行通信。該接口一般使用4條線:串行時鐘線(SCK)、主機輸入/從機輸出數據線MISO、主機輸出/從機輸入數據線MOSI和片選信號STE。
TMS320F2812的SPI模塊有主從兩種工作模式,可以通過寄存器來設置(其數據長度可以配置為1~16位,具有125種可編程的波特率);通過時鐘極性和時鐘相位可以將SPI模塊配置成4種不同的時鐘模式;有16級發送/接收FIFO,并且具有延時發送的功能,可以通過中斷或者查詢的方式來完成數據的發送和接收。
SPI模塊有8個寄存器需要設置,用來控制SPI的操作:SPICCR、SPICTL用來配置SPI的工作狀態;SPISTS用來獲取SPI的狀態信息,包括2個接收狀態位和1個發送緩沖狀態位,可以通過查詢這些狀態位來判斷是否完成數據的接收或者發送;SPIBRR用來設置SPI的波特率;SPIRXBUF和SPITXBUF分別用來接收和發送數據;SPIDAT裝載SPI要發送的數據,SPIPRI用來設置SPI中斷的優先級。
1.2EEPROM芯片25LC040
25LC040是SPI接口的4 Kb EEPROM,至少可以擦寫1 000萬次,數據至少可以保存200年,可以滿足大部分數據存儲的要求。DSP必須能通過相應的指令實現對25LC040的訪問。25LC040的操作指令如表1所列。

表1中,A8是讀/寫開始地址的第9位。25LC040是512×8位的EEPROM,分成上下兩頁,每頁256個字節,通過選擇A8可以實現對不同頁的操作。
1.2.1讀時序
當片選信號為低時,向25LC040傳送8位的讀指令(0000 A8011),緊接著傳送需要讀取數據的低8位地址。當正確的讀寫指令和地址被識別后,EEPROM中對應地址的數據將會由輸出引腳順次傳出,若繼續提供時鐘信號,下一位地址對應的數據也會依次讀出。當片選信號為高時,讀數據的操作將會被終止。其具體操作如圖1所示。圖中,CS為片選信號,SCK為時鐘信號,SI為輸入引腳信號,SO為輸出引腳信號。

1.2.2寫時序
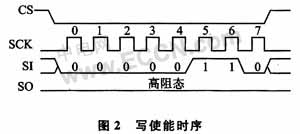
在對25LC040進行任何寫操作之前,必須先執行WREN(寫使能)指令。寫使能指令的操作如圖2所示。先使片選信號為低,然后傳送寫使能指令到25LC040中,指令傳送完畢后,必須將片選信號設置為高以完成寫使能操作。如果寫指令傳送結束后沒有拉高片選信號,直接進行寫操作,那么數據將不會寫入到存儲陣列中。
寫使能操作完成后,片選信號應該被拉低以進行寫操作,時序如圖3所示。寫指令、寫入地址以及寫入的數據會被依次傳送到25LC040中。若要使數據正確地寫入到存儲陣列中,片選信號應該在最后一個有效字節的D0位傳送完畢后被拉高。

2 TMS320F2812的SPI接口設計
TMS320F2812與25LC040的硬件連接如圖4所示。TMS320F2812工作在主模式,SPISIMO為主模式下的數據輸出接口,連接到25LC040的數據接收端口;SPISOMI為主模式下的數據輸入接口,連接到25LC040的數據發送端口;時鐘信號SPICLK和片選信號SPISTE均由TMS320F2812產生。寫保護引腳WP直接接高電平以確保25LC040總是可以被寫入。

2.1 SPI模塊的設置
SPI模塊的波特率可由如下兩種情況計算得出:
①SPIBRR=3~127,波特率的計算公式為:
SPI波特率=LSPCLK/(SPIBRR+1)
②SPIBRR=0~2,波特率的計算公式為:
SPI波特率=LSPCLK/4
LSPCLK是TMS320F2812的低速外設時鐘頻率;SPIBRR是SPIBRR寄存器的值。將LSPCLK設置成37.5 MHz,25LC040的最大時鐘頻率為2 MHz,SPI的波特率應該小于2 MHz,即37.5/(SPIBRR+1)≤2,SPIBRR的取值范圍為SPIBRR≥18。
通信中將SPISIMO、SPISOMI和SPICLK設置為基本功能SPI口,SPISTE設置為一般I/O口。作為25LC040的片選信號,當主/從控制器進行數據交換時,SPISTE配置成低電平,數據傳輸結束后再配置成高電平。
TMS320F2812的數據寄存器都是16位的,且接收和發送都是雙緩沖的,而25LC040的地址和數據寄存器都是8位的,因此將SPI模塊的數據長度設置成8位。發送緩沖寄存器SPITXBUF中的數據以左對齊的方式發送,先發送數據的最高位,因此在發送數據前必須將等待發送的數據放在SPITXBUF的高8位。當要對25LC040進行寫使能操作時,寫入SPITXBUF的數據應為0x0600。TMS320F2812則是以右對齊的方式來接收數據的,8位的數據被放在SPITXBUF的低8位上。
SPI模塊有4種時鐘模式:上升沿無延時模式、上升沿有延時模式、下降沿無延時模式和下降沿有延時模式。25LC040是在時鐘的上升沿接收數據,下降沿發送數據,所以TMS320F2812的SPI應該配置為上升沿發送數據,下降沿接收數據。
2.2接收數據流程
通過SPI讀取數據比較簡單,只需要依次傳送讀指令和待讀數據的低位地址,就可以在SPISOMI引腳上接收到25LC040中的數據。因為TMS320F2812為主控制器,所以必須先發送一個無意義的數,才能夠啟動時鐘。在SPI狀態寄存器(SPISTS)中有一個SPI中斷標志位(SPIINT FLAG),該位是一個只讀標志位,由硬件設置。當SPI已經完成數據發送或者接收,正在等待下一步的操作時,SPI中斷標志位被置1,若使能SPI中斷,將產生一個SPI中斷請求。可以通過查詢SPI中斷標志位來判斷數據是否完成接收。若該標志為1,已接收的數據將被放入接收緩沖寄存器SPIRXBUF中,通過讀SPIRXBUF寄存器即可得到需要的數據。下面給出接收數據的子程序,其中addr為待讀數據的低位地址。

2.3發送數據流程
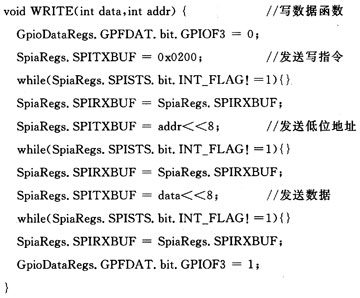
SPI發送數據需要先完成寫使能操作,然后依次傳送寫指令和低位地址,才可以正確地進行數據寫入。向SPITXBUF寄存器中寫入待發的數據,SPI時鐘就會自動啟動,數據會由輸出引腳順次傳出;數據傳送完后,SPI時鐘自動停止。也可以通過查詢SPI中斷標志位來判斷數據是否完成發送,若該標志位為1,則可接著發送下一個數據。SPI設置成主模式時,發送完一個數據,必須要空讀一下SPIRXBUF寄存器,以清除SPI中斷標志位。由于在讀取數據的過程中已經包含讀SPIRXBUF寄存器,因此在讀取數據時不需要再空讀SPIRXBUF寄存器。下面給出發送數據程序,其中data為待發送的數據,addr為待發送數據將要存放的地址。
2.4運行效率的提升
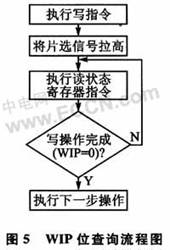
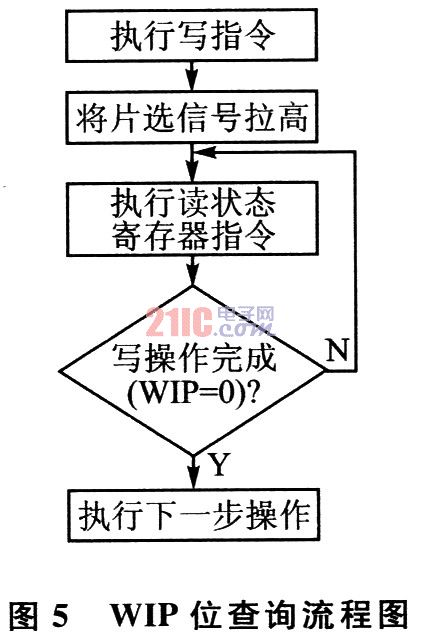
25LC040要求在寫操作之后有一定的寫周期時間來存儲數據,其間TMS320F2812對25LC040的所有訪問會被忽略。每個器件都有規定的最壞情況寫周期時間,可以通過在再次訪問25LC040之前插入不小于最壞情況寫周期時間的延時等待來確保遵守寫周期時間。但是25LC040常常會在最大規定時間內完成寫周期,而此時TMS320F2812還在等待,會造成不必要的時間浪費。25LC040內部有一個狀態寄存器,其第1位為WIP(Write-In-Process)位,該位是一個只讀位,可以顯示25LC040是否處在寫周期內。當芯片處于寫周期時,WIP位置1;當寫操作完成時,WIP位立即清零。狀態寄存器在寫操作期間仍然可讀,可以通過讀狀態寄存器指令(WRSR)來獲取狀態寄存器的內容,從而得到WIP位的值以判斷寫周期何時完成,以進入下一步操作。這樣就可以減少不必要的等待時間,使運行更加高效。具體的流程如圖5所示。
結語
本文在分析TMS320F2812 SPI模塊的特點的基礎上,描述了SPI各個控制寄存器的作用。通過與EEPROM25LC040通信的實例,給出了SPI口的軟硬件設計方法,并對其中需要注意的關鍵問題進行了分析討論。
1 主要芯片簡介
1.1TMS320F2812 SPI模塊
SPI總線是一種同步串行外設接口,它可以使控制芯片以串行方式與各種外圍設備進行通信。該接口一般使用4條線:串行時鐘線(SCK)、主機輸入/從機輸出數據線MISO、主機輸出/從機輸入數據線MOSI和片選信號STE。
TMS320F2812的SPI模塊有主從兩種工作模式,可以通過寄存器來設置(其數據長度可以配置為1~16位,具有125種可編程的波特率);通過時鐘極性和時鐘相位可以將SPI模塊配置成4種不同的時鐘模式;有16級發送/接收FIFO,并且具有延時發送的功能,可以通過中斷或者查詢的方式來完成數據的發送和接收。
SPI模塊有8個寄存器需要設置,用來控制SPI的操作:SPICCR、SPICTL用來配置SPI的工作狀態;SPISTS用來獲取SPI的狀態信息,包括2個接收狀態位和1個發送緩沖狀態位,可以通過查詢這些狀態位來判斷是否完成數據的接收或者發送;SPIBRR用來設置SPI的波特率;SPIRXBUF和SPITXBUF分別用來接收和發送數據;SPIDAT裝載SPI要發送的數據,SPIPRI用來設置SPI中斷的優先級。
1.2EEPROM芯片25LC040
25LC040是SPI接口的4 Kb EEPROM,至少可以擦寫1 000萬次,數據至少可以保存200年,可以滿足大部分數據存儲的要求。DSP必須能通過相應的指令實現對25LC040的訪問。25LC040的操作指令如表1所列。
表1中,A8是讀/寫開始地址的第9位。25LC040是512×8位的EEPROM,分成上下兩頁,每頁256個字節,通過選擇A8可以實現對不同頁的操作。
1.2.1讀時序
當片選信號為低時,向25LC040傳送8位的讀指令(0000 A8011),緊接著傳送需要讀取數據的低8位地址。當正確的讀寫指令和地址被識別后,EEPROM中對應地址的數據將會由輸出引腳順次傳出,若繼續提供時鐘信號,下一位地址對應的數據也會依次讀出。當片選信號為高時,讀數據的操作將會被終止。其具體操作如圖1所示。圖中,CS為片選信號,SCK為時鐘信號,SI為輸入引腳信號,SO為輸出引腳信號。
1.2.2寫時序
在對25LC040進行任何寫操作之前,必須先執行WREN(寫使能)指令。寫使能指令的操作如圖2所示。先使片選信號為低,然后傳送寫使能指令到25LC040中,指令傳送完畢后,必須將片選信號設置為高以完成寫使能操作。如果寫指令傳送結束后沒有拉高片選信號,直接進行寫操作,那么數據將不會寫入到存儲陣列中。
寫使能操作完成后,片選信號應該被拉低以進行寫操作,時序如圖3所示。寫指令、寫入地址以及寫入的數據會被依次傳送到25LC040中。若要使數據正確地寫入到存儲陣列中,片選信號應該在最后一個有效字節的D0位傳送完畢后被拉高。
2 TMS320F2812的SPI接口設計
TMS320F2812與25LC040的硬件連接如圖4所示。TMS320F2812工作在主模式,SPISIMO為主模式下的數據輸出接口,連接到25LC040的數據接收端口;SPISOMI為主模式下的數據輸入接口,連接到25LC040的數據發送端口;時鐘信號SPICLK和片選信號SPISTE均由TMS320F2812產生。寫保護引腳WP直接接高電平以確保25LC040總是可以被寫入。
2.1 SPI模塊的設置
SPI模塊的波特率可由如下兩種情況計算得出:
①SPIBRR=3~127,波特率的計算公式為:
SPI波特率=LSPCLK/(SPIBRR+1)
②SPIBRR=0~2,波特率的計算公式為:
SPI波特率=LSPCLK/4
LSPCLK是TMS320F2812的低速外設時鐘頻率;SPIBRR是SPIBRR寄存器的值。將LSPCLK設置成37.5 MHz,25LC040的最大時鐘頻率為2 MHz,SPI的波特率應該小于2 MHz,即37.5/(SPIBRR+1)≤2,SPIBRR的取值范圍為SPIBRR≥18。
通信中將SPISIMO、SPISOMI和SPICLK設置為基本功能SPI口,SPISTE設置為一般I/O口。作為25LC040的片選信號,當主/從控制器進行數據交換時,SPISTE配置成低電平,數據傳輸結束后再配置成高電平。
TMS320F2812的數據寄存器都是16位的,且接收和發送都是雙緩沖的,而25LC040的地址和數據寄存器都是8位的,因此將SPI模塊的數據長度設置成8位。發送緩沖寄存器SPITXBUF中的數據以左對齊的方式發送,先發送數據的最高位,因此在發送數據前必須將等待發送的數據放在SPITXBUF的高8位。當要對25LC040進行寫使能操作時,寫入SPITXBUF的數據應為0x0600。TMS320F2812則是以右對齊的方式來接收數據的,8位的數據被放在SPITXBUF的低8位上。
SPI模塊有4種時鐘模式:上升沿無延時模式、上升沿有延時模式、下降沿無延時模式和下降沿有延時模式。25LC040是在時鐘的上升沿接收數據,下降沿發送數據,所以TMS320F2812的SPI應該配置為上升沿發送數據,下降沿接收數據。
2.2接收數據流程
通過SPI讀取數據比較簡單,只需要依次傳送讀指令和待讀數據的低位地址,就可以在SPISOMI引腳上接收到25LC040中的數據。因為TMS320F2812為主控制器,所以必須先發送一個無意義的數,才能夠啟動時鐘。在SPI狀態寄存器(SPISTS)中有一個SPI中斷標志位(SPIINT FLAG),該位是一個只讀標志位,由硬件設置。當SPI已經完成數據發送或者接收,正在等待下一步的操作時,SPI中斷標志位被置1,若使能SPI中斷,將產生一個SPI中斷請求。可以通過查詢SPI中斷標志位來判斷數據是否完成接收。若該標志為1,已接收的數據將被放入接收緩沖寄存器SPIRXBUF中,通過讀SPIRXBUF寄存器即可得到需要的數據。下面給出接收數據的子程序,其中addr為待讀數據的低位地址。
2.3發送數據流程
SPI發送數據需要先完成寫使能操作,然后依次傳送寫指令和低位地址,才可以正確地進行數據寫入。向SPITXBUF寄存器中寫入待發的數據,SPI時鐘就會自動啟動,數據會由輸出引腳順次傳出;數據傳送完后,SPI時鐘自動停止。也可以通過查詢SPI中斷標志位來判斷數據是否完成發送,若該標志位為1,則可接著發送下一個數據。SPI設置成主模式時,發送完一個數據,必須要空讀一下SPIRXBUF寄存器,以清除SPI中斷標志位。由于在讀取數據的過程中已經包含讀SPIRXBUF寄存器,因此在讀取數據時不需要再空讀SPIRXBUF寄存器。下面給出發送數據程序,其中data為待發送的數據,addr為待發送數據將要存放的地址。
2.4運行效率的提升
25LC040要求在寫操作之后有一定的寫周期時間來存儲數據,其間TMS320F2812對25LC040的所有訪問會被忽略。每個器件都有規定的最壞情況寫周期時間,可以通過在再次訪問25LC040之前插入不小于最壞情況寫周期時間的延時等待來確保遵守寫周期時間。但是25LC040常常會在最大規定時間內完成寫周期,而此時TMS320F2812還在等待,會造成不必要的時間浪費。25LC040內部有一個狀態寄存器,其第1位為WIP(Write-In-Process)位,該位是一個只讀位,可以顯示25LC040是否處在寫周期內。當芯片處于寫周期時,WIP位置1;當寫操作完成時,WIP位立即清零。狀態寄存器在寫操作期間仍然可讀,可以通過讀狀態寄存器指令(WRSR)來獲取狀態寄存器的內容,從而得到WIP位的值以判斷寫周期何時完成,以進入下一步操作。這樣就可以減少不必要的等待時間,使運行更加高效。具體的流程如圖5所示。
結語
本文在分析TMS320F2812 SPI模塊的特點的基礎上,描述了SPI各個控制寄存器的作用。通過與EEPROM25LC040通信的實例,給出了SPI口的軟硬件設計方法,并對其中需要注意的關鍵問題進行了分析討論。









 工商網監
工商網監
評論