 電子發燒友App
電子發燒友App


引言
近年來,智能脫扣器技術在國內有了較快的發展。智能脫扣器的成功應用,使得斷路器的功能更加強大。目前,國內外研究生產的智能脫扣器能顯示開關狀態、三相電流、電壓、功率因數、有功功率等參數。而控制器局域網(CAN) 能有效支持具有高安全級的分布式實時控制,憑借其在噪聲環境中的可靠性及其故障狀態檢測,以及從故障狀態恢復的能力,被廣泛應用于工業控制等領域。因此,國內外大都將比較成熟的CAN 現場總線技術應用在智能脫扣器的通信方面,實現上下位機的“四遙”功能,即遙測、遙控、遙信和遙調。上位機CAN 主要對下位機采集到的信號進行監控、調度和管理。上位機作為一個特殊的CAN 節點,其設計相對復雜。本文將重點介紹上位機CAN 智能節點硬件和軟件的設計方案,以及如何把MCGS 與CAN 總線結合起來使用,即MCGS 如何操作CAN 總線接口卡。
1 設計原理
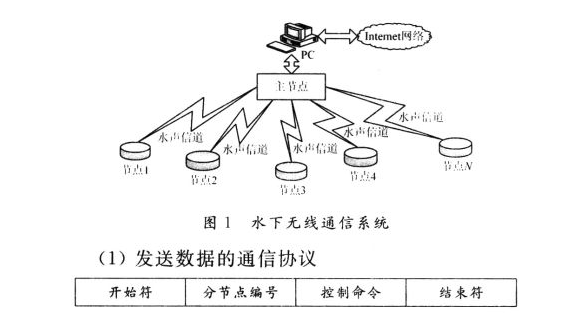
電網信號經過下位機采集,A/D 轉換和數據算法程序處理傳到上位機后,要能夠顯示到上位機上,這樣才能實現工作人員對各個斷路器工作狀態的監控,并且通過上位機界面能夠實現對下位機發送參數命令,實現對下位機的調控。該功能是依靠上位機這個特殊的CAN 節點實現的。
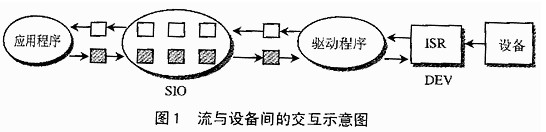
上位機CAN 節點設計的總體結構如圖1 所示。在CAN 總線網絡中,ARM 節點作為下位機來工作,它們采集現場的數據,采集上來的數據需要傳到上位PC 機上進行進一步處理,通過監控軟件監控下位機節點的工作狀態。上位PC 機作為CAN 總線上一個比較特殊的節點,其設計相對復雜。上位機和下位機智能節點通信是以USBCAN卡為橋梁的,即利用CAN 卡的OPC 接口驅動軟件,解決CAN 總線與PC 之間的通信問題。通過調用CAN 卡的動態連接庫(. DLL),利用自定義CAN 應用層協議實現與CAN 總線應用系統的連接;通過OPC 服務器連接的函數接口,調用動態連接庫來實現與監控軟件的連接。因此,上位機設計主要是利用USBCAN 驅動程序,調用USBCAN接口卡所提供的動態鏈接庫,達到操作USBCAN接口卡的目的,利用CAN 卡的OPC 接口驅動軟件,來實現數據管理人機界面設計。

圖1 軟件結構示意圖.
2 CAN 總線上位機節點的設計
2. 1 硬件電路設計
一般說來,計算機本身不帶CAN 接口,因此直接使用計算機和CAN 網絡是不能互連的。但是,許多工業用計算機在某些應用場合還是離不開CAN-bus,因此,就需要現有的計算機通信接口與CAN-bus 接口適配,于是CAN 接口卡就給計算機增加CAN-bus 接口功能。通俗意義上說,CAN通信適配卡加上計算機就組成一個特殊的CAN節點。本設計采用USBCAN-2A 型CAN 卡,主機通過USB 接口控制電路來訪問CAN 控制器,最終完成數據通信。計算機作為CAN 節點,接收來自下位機ARM 節點采集的數據,將一些控制參數發送給下位機,并通過組態界面實現對下位機的監控等功能。
USBCAN-2A 智能CAN 接口卡是與USB1. 1總線兼容的,帶有2 路CAN 接口的智能型CAN數據卡,符合CAN2. 0B 規范,兼容CAN2. 0A,符合ISO/IS 11898,其通信波特率可以通過編程任意設置,范圍在5 ~ 1 000 KB /s 之間。組成該CAN 卡的控制器是常用的PHILIPS SJA1000,收發器為PHILIPS PCA82C250。USBCAN-2A 接口卡上自帶電氣隔離模塊,使USBCAN-2A 接口卡避免由于地環流的損壞,增強系統在惡劣環境中使用的可靠性。
USBCAN-2A 卡提供了很多庫函數,PC 機通過對USBCAN-2A 接口庫函數的操作,實現對USBCAN-2A 接口卡的操作。上位機主要實現對CAN 卡的初始化和對CAN 的讀寫操作。
為了增強CAN 通信的可靠性,CAN 總線網絡的2 個端點通常要加入終端匹配電阻,終端匹配電阻的值由傳輸電纜的特性阻抗所決定。由于雙絞線的特性阻抗為120 Ω,因此CAN-bus 網絡采用直線拓撲結構時,總線的2 個終端需要安裝120 Ω 的終端電阻。CAN-bus 總線的連接如圖2所示。
圖2 CAN-bus 總線連接圖.
USBCAN-2A 接口卡內部沒有集成120 Ω 終端電阻,當USBCAN-2A 接口卡位于CAN-bus 網絡的一個端點上時,需要在外部端子上安裝120 Ω終端電阻,連接方法如圖3 所示。

圖3 USBCAN-2A 位于網絡終端時的連接方法.
2. 2 軟件部分設計
上位機的軟件設計可以通過調用CAN 卡的動態連接庫(. DLL),利用自定義CAN 應用層協議實現與CAN 總線應用系統的連接,USBCAN-2A 智能CAN 接口卡支持Win9x /Me、Win2000 /XP 等操作系統,也支持Linux2. 4、Linux2. 6 版版本的操作系統。USBCAN-2A 提供了統一的應用程序編程接口,便于用戶進行應用程序開發。支持VC、VB、Delphi 和C + + Builder 等開發。本設計采用MCGS 組態軟件實現對智能CAN 卡的操作控制。一般來說,MCGS 訪問接口卡都是通過MCGS 系統中已有的相應設備構件來進行的,這些設備構件主要由MCGS 開發商預先開發,但也可由最終用戶根據MCGS 技術規范自行開發。對于USB-2A 型智能CAN 接口卡,MCGS 系統沒有提供可以直接調用的相應設備構件。要成功地使MCGS 能訪問USB-2A 型接口卡,通常的辦法是由開發商或用戶自己開發USB-2A 型的設備構件,但這將花費大量的時間,且有一定的難度。為解決這一問題,我們采用了OPC 服務器技術。
MCGS 支持OPC 協議,它可以用作OPC 客戶端與OPC 服務器接*換數據;同時USBCAN-2A 型CAN 接口卡也可以被OPC 服務器所支持,用作OPC 服務器的數據來源和數據接收體,由OPC 服務器自動與其交換數據。能采用的OPC服務器有很多種,周立功公司開發的ZOPC_Server就是一款很好OPC 服務器軟件,它支持ZLGCAN 系列接口卡和MCGS 組態軟件。MCGS、ZOPC_Server 與USBCAN-2A 型有機協調工作,就完全能很好地解決MCGS 與USBCAN-2A 之間的接口問題,使用戶程序能有效地訪問CAN 總線網絡。它們之間的關系示意圖如圖4 所示。
圖4 MCGS、ZOPC - Server 和USB-2A 關系示意圖.
本設計通過ZOPC_Server 服務器,與CAN 網絡進行數據通信。ZOPC_Server 是一個OPC 服務器軟件,只要在一臺PC 機上插上USBCAN-2A 接口卡,再運行本服務器軟件,并在服務器軟件中進行一些相關配置以后,就可以使用任何一種支持OPC 協議的客戶端軟件(比如組態軟件:組態王、MCGS 和INTOUCH 等)來連接到該服務器。
在服務器中,對于每個CAN 設備的每路CAN,都固定有2 個通道,分別為In_CANData 和Out_CANData。對于輸入通道In_CANData,服務器把從CAN 網絡接收到的數據存放到此數據項中,客戶端只能讀取它的數據;而對于輸出通道Out_CANData,客戶端把要發送的數據寫入到此數據項中,服務器再把此數據項中的數據提取出來發送到CAN 網絡,客戶端不能讀取此數據項的數據。它們的存儲格式都為字符串形式。2 個數據項In_CANData 和Out _CANData,其長度都為30 Byte,前14 Byte 為幀信息,后16 Byte 為CAN數據。
本設計使用的監控軟件為MCGS 組態軟件,通過對組態軟件的簡單設置,將ZOPC_Server 添加到MCGS 組態軟件中去,就可以在組態軟件中使用服務器中的數據了。ZOPC_Server 的輸入通道In_CANData 接收到的CAN 數據是字符串形式的,而且接收的數據根據通信協議最后16 Byte 的數據為采集的電網信號大小,通過MCGS 組態軟件中的系統函數,編寫腳本函數,首先將數據進行解包處理,截取后16 Byte 的數據,然后將這16 Byte的十六進制字符串形式的數據,轉換為十進制數據,并將這個數據放到一個定義的變量里。
對CAN 網絡發送數據時,用戶程序需把具體的幀信息和要發送的數據按Out_CANData 的格式組合成一個字符串,用戶程序對于接收到的數據(In_CANData 格式)也需進行拆分,識別出幀信息和接收到的有用數據供程序使用。
2. 3 組態界面的設計
組態界面的設計主要包括了主界面的設計、數據顯示界面的設計等,其中主界面包括實時的電網信號值的顯示,報警信號的顯示界面,報警上、下限修改輸入窗口和下位機電網參數修改窗口。
2. 3. 1 主開機界面設計
實時電網信號值顯示畫面框如圖5 所示。通過該窗口,操作人員可以很容易看到電網信號的當前數據值。

圖5 實時電網信號值顯示畫面框.
本設計的智能脫扣器可以適用于不同的斷路器中,而不同的應用場合需要的脫扣參數是不同的,這就要求能夠隨時修改下位機的脫口參數,來實現對下位機的調控,圖6 為修改脫扣器脫扣參數窗口。
主界面中,通過設計報警信號顯示畫面,可以觀察在何時出現怎樣的故障報警,隨時供操作人員修改高、低報警值限。當電壓、電流信號出現故障時,指示燈能給出故障指示。在對數據對象進行報警定義時,已經選擇報警產生時“自動保存產生的報警信息”,可以使用“報警信息瀏覽”構件,瀏覽數據庫中保存下來的報警信息。

圖6 修改脫扣器脫扣參數窗口.
通過主界面的設計,能夠方便地讀出實時電網信號值。通過電網參數修改窗口,能夠方便地控制ARM 下位機節點發出脫扣信號的值。通過報警修改輸入窗口,則可以方便操作者隨時修改報警上、下限值。
2. 3. 2 數據顯示界面設計
數據顯示窗口包括了實時數據和歷史數據的報表值顯示,實時曲線、歷史曲線的顯示,方便工作人員對數據的監控。
實時數據報表值顯示窗口如圖7 所示。實時報表是對瞬時量的反映,用于將當前時間的數據變量按一定報告格式( 用戶組態) 顯示和打印出來。實時報表可以通過MCGS 系統的自由表格構件來組態顯示實時數據報表。

圖7 實時數據報表值顯示窗口.
歷史數據報表值顯示窗口如圖8 所示。歷史報表用于從歷史數據庫中提取數據記錄,并以一定的格式顯示歷史數據。
圖8 歷史數據報表值顯示窗口.
實時曲線窗口是用曲線顯示電網數據對象數值的動畫圖形,像筆繪記錄儀一樣實時記錄數據對象值的變化情況。實時曲線窗口如圖9 所示,顯示了實時的A 相電壓和電流值。

圖9 實時曲線窗口.
本設計還包括了歷史曲線的設計,能方便操作人員對歷史曲線進行查詢。
通過組態界面的設計,工作人員還能隨時查詢報警數據、歷史數據等,并可以方便地將這些數據導入Excel 表中進行打印。
3 結語
將USBCAN-2A 型CAN 接口卡應用在智能斷路器CAN 通信設計上,很好地實現了計算機和CAN 網絡互連,就能將上位機看作一個CAN 智能節點,接收來自下位機CAN 節點采集的電網信號,同時能夠發送脫扣參數給下位機。而MCGS系統本身的一些局限性,用在通信方面不多,但通過合理的設計方案和編寫用戶程序,可以很好地用在CAN 總線工業現場監控網上,實現組態對CAN 接口卡的操作。組態界面的設計,使得操作人員對電網信號的監控更方便。










 工商網監
工商網監
評論