 電子發燒友App
電子發燒友App


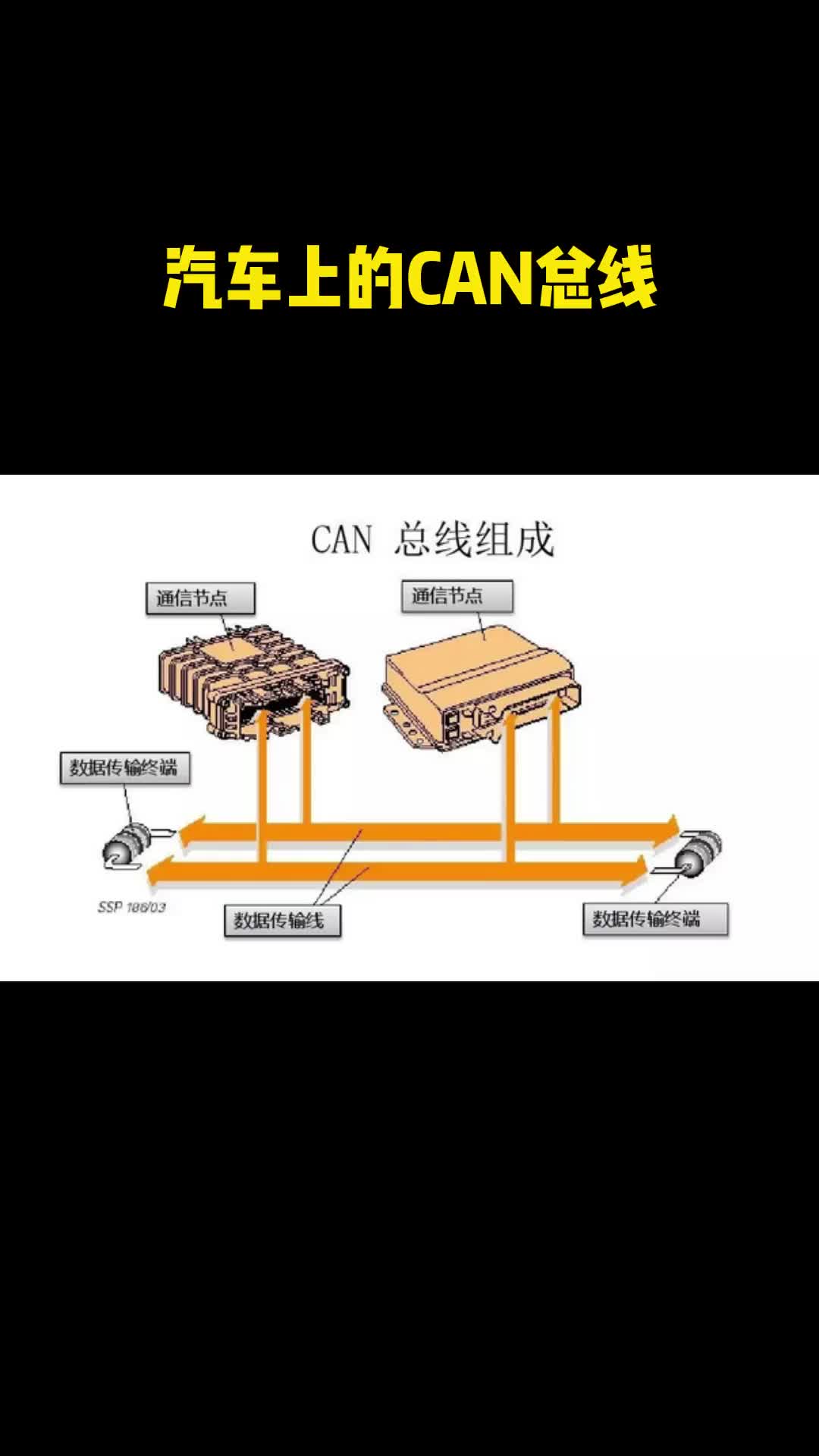
CAN總線的總體結構
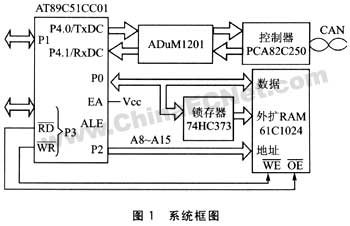
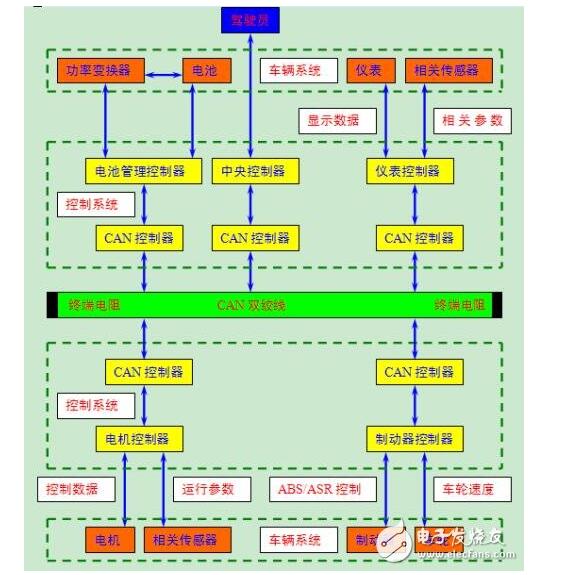
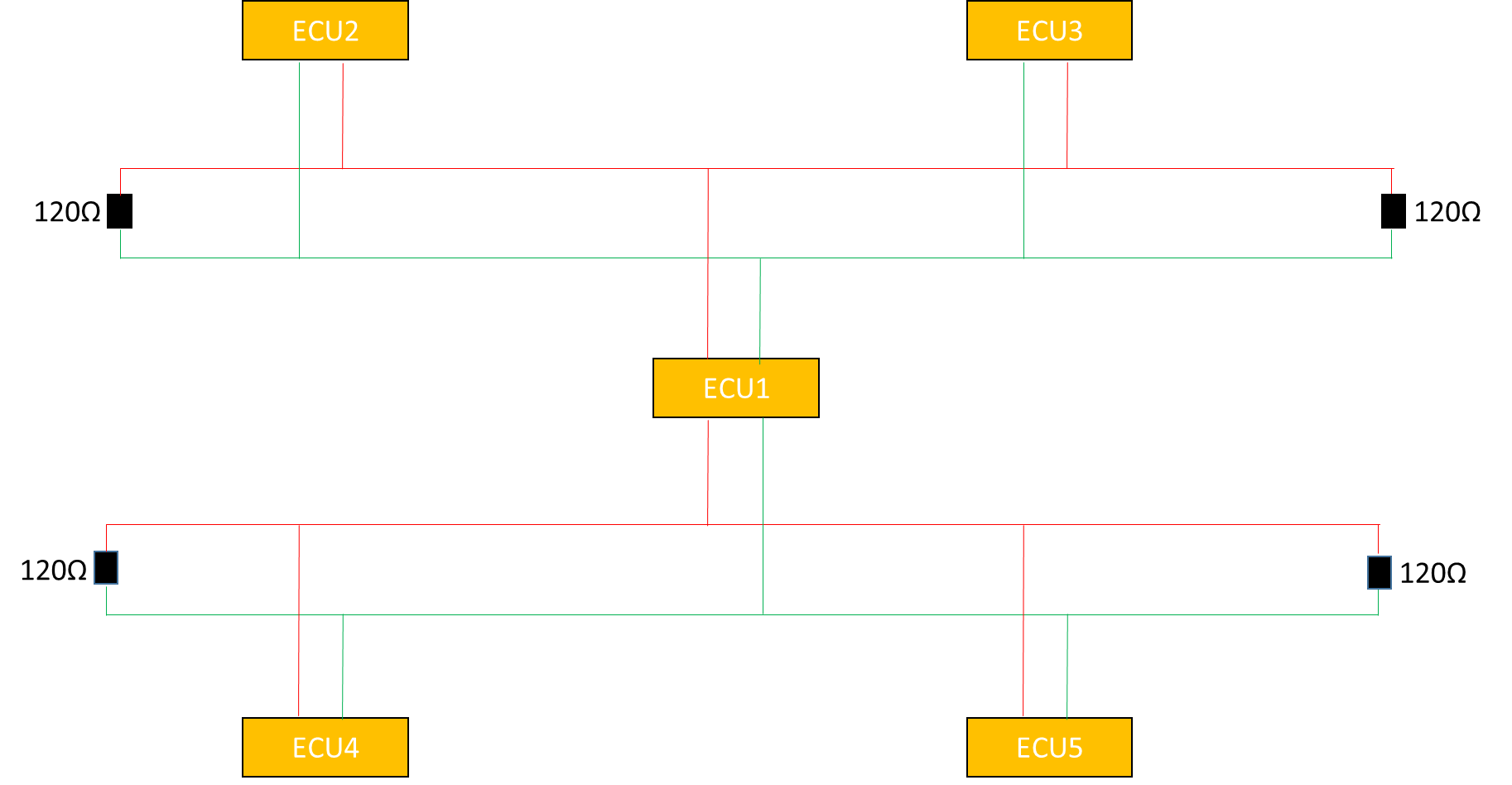
CAN總線由CAN控制器、CAN收發器、數據傳輸線、數據傳輸終端等組成。CB311的ECU(發動機控制單元)、TCU(變速器控制單元)、FEPS(無鑰匙進入和無鑰匙啟動系統)、組合儀表四個電控單元通過CAN總線連接,CAN控制器、CAN收發器均集成在電控單元中。CB311CAN總線的結構如圖1所示。
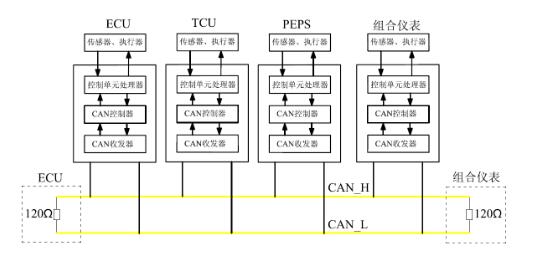
圖1 CB311 CAN總線的總體結構
1、CAN控制器
CAN控制器集成在電控單元內部,接收由控制單元微處理器傳來的數據。CAN控制器對這些數據進行處理并將其傳遞給CAN收發器;同樣CAN控制器也接收收發器傳來的數據,處理后傳遞給控制單元微處理器。
2、CAH收發器
CAN收發器集成在電控單元內部,同時兼具接收、發送和轉化數據信號的功能。它將CAN控制器發送來的電平信號數據轉化為電壓信號并通過數據傳輸線以廣播方式發送出去。同時,它接收數據傳輸線發送來的電壓信號并將電壓信號轉化為電平信號數據后,發送到CAN控制器。
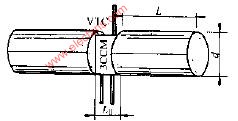
3、數據傳輸線
為了減少干擾,CN總線的數據傳輸線采用雙絞線,其絞距為20mm,截面積為0.5m,稱這兩根線為CAN-高線(CAN-H)和CAN-低線(CAN-L),如圖2所示。兩根線上傳輸的數據相同,電壓值互成鏡像,這樣,兩根線的電壓差保持一個常值,所產生的電磁場效應也會由于極性相反而互相抵消。通過該方法,數據傳輸線可免受外界輻射的干擾;同時,向外輻射時,實際上保持中性(即無輻射)。
4、數據傳輸終端
數據傳輸終端是一個電阻器,阻止數據在傳輸終了被反射回來破壞數據,一般數據傳輸終端為120Q的電阻。CB311的數據傳輸終端為兩個1202的電阻,分別集成在BCU和組合儀表中。
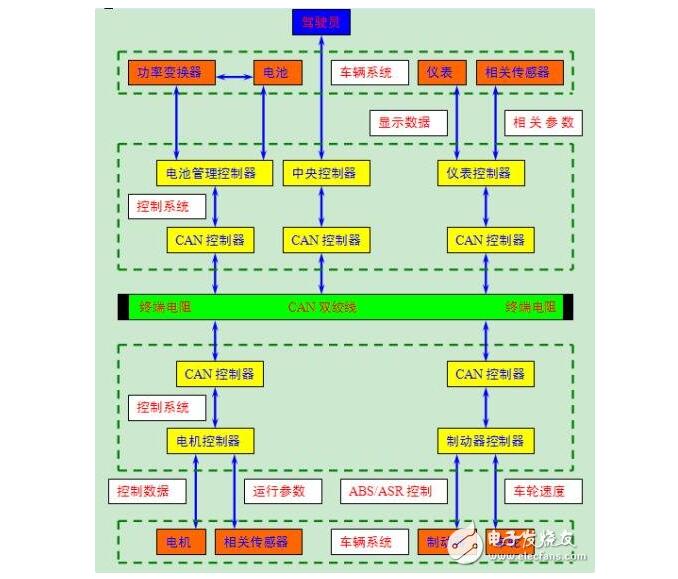
汽車CAN總線數據傳輸系統構成及工作原理
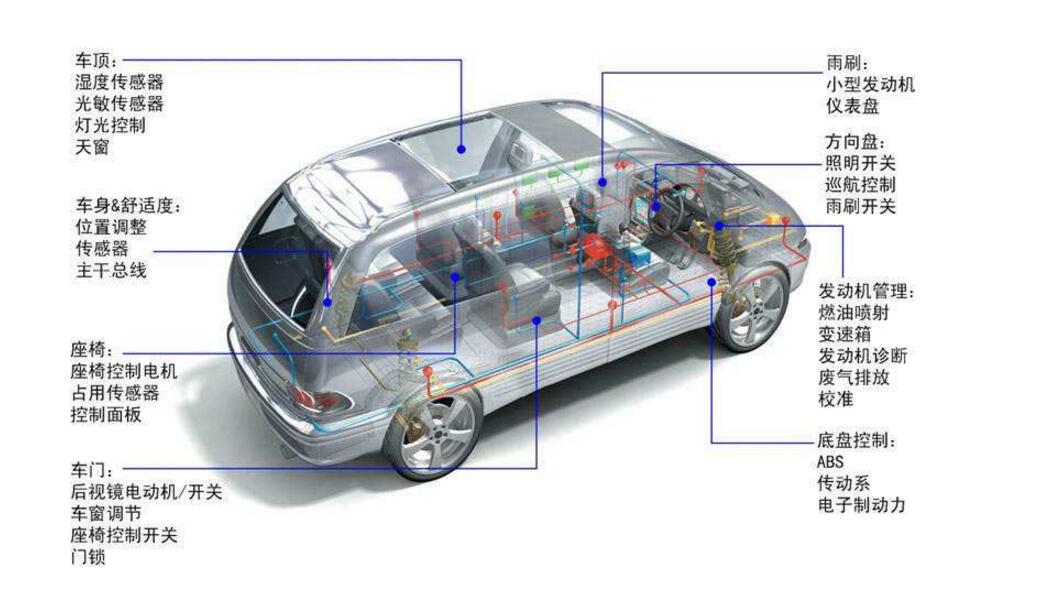
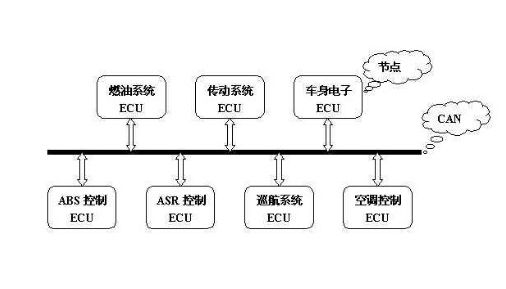
現代汽車的電控單元主要有主控制器、發動機控制系統、懸架控制系統、制動防抱死控制系統(ABs牽引力控制系統、AsR控制系統、儀表管理系統、故障診斷系統、中央門鎖系統、座椅調節系統等。所有這些子控制系統連接起來構成1個實時控制系統,即:指令發出去之后,必須保證在一定時間內得到響應,否則,就有可能發生重大事故。這就要求汽車上的cAN通信網絡有較高的波特率設置。另外,汽車在實際運行過程中,眾多節點之間需要進行大量的實時數據交換。若整個汽車的所有節點都掛在1個cAN網絡上,眾多節點cAN總線進行通信,信息管理配置稍有不當,就很容易出現總線負荷過大,導致系統實時響應速度下降。這在實時系統中是不允許的,因此在對汽車上各節點的實性進行了分析之后,根據各節點對實時性的要求,設計了高、中、低速3個速率不同的CAN通信網絡,將實時性要求嚴格的節點組成高速cAN通信網絡,將其它實時性要求相對較低的節點組成中速cAN通信網絡,將剩下實時性要求不是很嚴格的節點組成低速CAN通信網絡。并架設網關將這3個速率不同的3個通信網絡連接起來,實現全部節點之間的數據共享。
汽車CAN總線故障產生的原因
CAN總線系統中擁有一個CAN控制器、一個信息收發器、兩個數據傳輸終端及兩條數據傳輸總線,除了數據總線外,其他各元件都置于各控制單元的內部。分析CAN總線系統產生故障的原因一般有以下三種:
1.汽車電源系統引起的故障:汽車電控模塊的工作電壓一般在10.5-15.0V,如果汽車電源系統提供的工作電壓不正常,就會使得某些電控模塊出現短暫的不正常工作,這會引起整個汽車CAN總線系統出現通信不暢。
2.汽車CAN總線系統的鏈路故障:當出現通信線路的短路、斷路或線路物理性質變化引起通信信號衰減或失真,都會導致多個電控單元工作不正常,使CAN總線系統無法工作。
3.汽車CAN總線系統的節點故障:節點是汽車CAN總線系統中的電控模塊,因此節點故障就是電控模塊的故障。它包括軟件故障即傳輸協議或軟件程序有缺陷或沖突,從而使汽車CAN總線系統通信出現混亂或無法工作,這種故障一般會成批出現;硬件故障一般是電控模塊芯片或集成電路故障,造成汽車CAN總線系統無法正常工作。
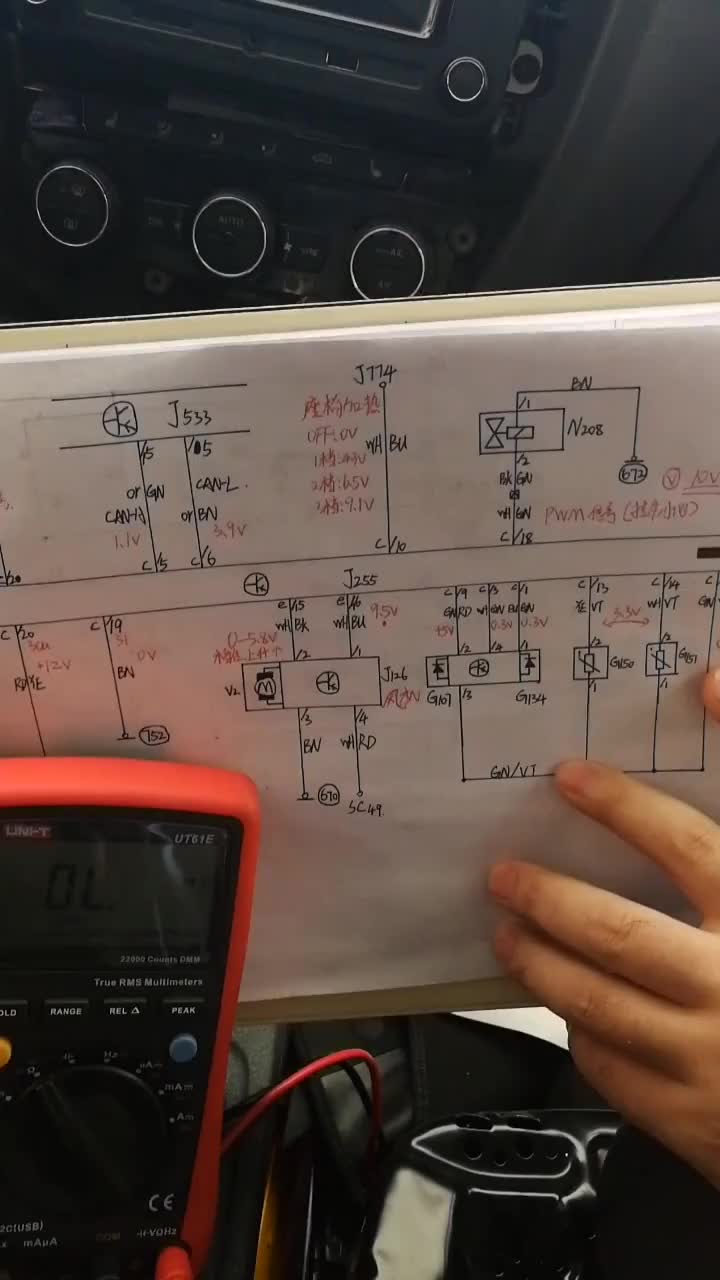
萬用表測量診斷CAN總線方法詳解
系統概覽:
此說明用于檢查總線連接上的CAN高速和CAN低速信號電平是否正確。
檢測提示:
●電壓檢測(示波器):電壓檢測的前提條件是,蓄電池已連接并且點火開關已接通。
●電阻測量:在電阻測量時,在測量前必須把待測部件斷電。為此應斷開車輛蓄電池的接線。等待約3分鐘,直到系統中的所有電容器放完電。
數據總線 K-CAN (車身 CAN)、PT-CAN (傳動系 CAN) 和 F-CAN (底盤 CAN) 之間的區別:
● K-CAN:數據傳輸率約 100 kBit/s。可以進行單線運行。
● PT-CAN:數據傳輸率約 500 kBit/s。不能進行單線運行。
● F-CAN:數據傳輸率約 500 kBits/s。不能單線運行
主控單元
主控單元是主動式通信方,通信的主動權由它發出。主控制單元掌控總線,并控制通信。主控制單元能夠在總線系統中向被動式總線用戶 (副控制單元) 發送信息,并根據被動式用戶的要求接收信息。
副控單元
副控制單元是一個被動式通信用戶。副控制單元被要求接收和發送數據。
多主控單元系統
在一個多主控單元系統中所有的通信用戶在某個時間都能夠擔當主控單元或副控制單元的角色。
示波器測量
為了弄清 CAN 總線是否完好工作,必須觀察總線上的通信情況。在這種情況下不需要分析單個位,而只需要觀察 CAN 總線是否工作。示波器測量說明:‘CAN 總線很可能無故障工作’。
如果用示波器測量 CAN 低 (或 CAN 高) 導線和接地之間的電壓,則獲得一個處于下列電壓極限范圍內的類矩形波信號:
K-CAN:
CAN Low (低速) 對地:U 最小 = 1 V,U 最大 = 5 V
CAN High (高速) 對地:U 最小 = 0 V,U 最大 = 4 V
這些值都是近似值,根據總線上的負載可能有幾個 100 mV 的偏差
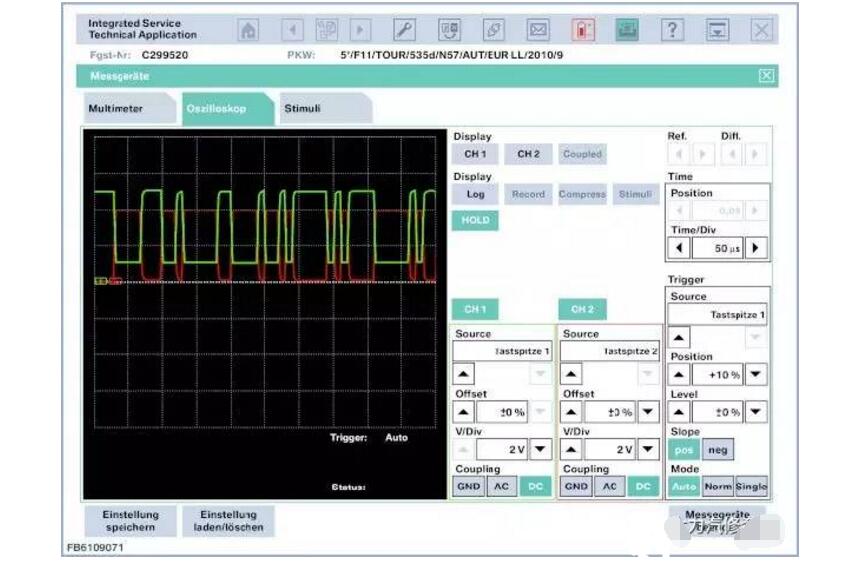
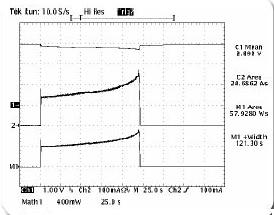
測量 K-CAN:CH1 CAN 低,CH2 CAN 高
如果用示波器測量 CAN 低 (或 CAN 高) 導線和接地之間的電壓,則獲得一個處于下列電壓極限范圍內的類矩形波信號:
PT-CAN 和 F-CAN:
CAN Low (低速) 對地:U 最小 = 1.5 V,U 最大 = 2.5 V
CAN High (高速) 對地:U 最小 = 2.5 V,U 最大 = 3.5 V

測量 PT-CAN:CH1 CAN 低,CH2 CAN 高
總線端測量
測量前提 :
● CAN 總線必須斷電。
● 不允許使用其它測量儀 (并聯測量儀)。
● 測量在 CAN-Low 導線和 CAN-High 導線之間進行。
● 實際值允許與標準值有幾歐姆的偏差。
K-CAN :
因為電阻根據控制單元內部的開關邏輯而變化,所以在 K-CAN 總線上不能進行規定的電阻測量!
PT-CAN、F-CAN :
為了避免信號反射,在 2 個 CAN 總線用戶上 (在 PT-CAN 網絡中的距離最遠) 分別連接一個 120 Ω 的終端電阻。這兩個終端電阻并聯,并構成一個 60 Ω 的等效電阻。關閉供電電壓后可以在數據線之間測量這個等效電阻。此外,單個電阻可以各自分開測量。
通過 60 Ω 等效電阻進行測量的提示:把一個便于拆裝的控制單元從總線上脫開。然后在插頭上測量 CAN-Low導線和 CAN-High 導線之間的電阻。
提示:
并非所有車輛都在 CAN 總線上有終端電阻。可以根據相應的電路圖檢查,在連接的車輛上是否安裝有終端電阻。
CAN 總線失效
當 K-CAN 或 PT-CAN 數據總線失效時,在 CAN-Low 或 CAN-High 導線上可能存在短路或斷路。或者某個控制單元已損壞。
為了查找故障原因,建議進行下列工作步驟:
● 將總線用戶從 CAN 總線上依次拔下,直至找到故障原因 (= 控制單元 X)。
● 檢查通往控制單元 X 的導線是否短路或斷路。
● 如有可能,檢測控制單元 X。
● 如果某個控制單元至 CAN 總線的分支線短路,僅執行該工作步驟就成功了。如果 CAN 總線中的一條導線自身短路,則必須檢查電線束。

















 工商網監
工商網監
評論