“ 總線關(guān)閉(bus off)是CAN節(jié)點比較重要的錯誤處理機制。那么,在總線關(guān)閉狀態(tài)下,CAN節(jié)點的恢復(fù)流程是怎樣的?又該如何理解節(jié)點恢復(fù)流程的“快恢復(fù)”和“慢恢復(fù)”機制?本文將為大家詳細分析總線
2020-08-04 11:16:00 13380
13380 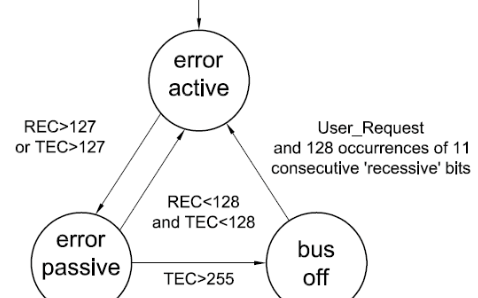
為了防止故障節(jié)點干擾甚至阻塞整個CAN網(wǎng)絡(luò)系統(tǒng),CAN協(xié)議實現(xiàn)了復(fù)雜的故障限制機制。為了保證通信的正常,CAN 2.0 總線協(xié)議總線中各節(jié)點需要采取以下措施進行錯誤檢測。
2022-11-08 17:12:447486 錯誤幀是CAN總線用于進行錯誤通知的報文,可以將任何一個節(jié)點發(fā)現(xiàn)的錯誤通知給其他節(jié)點,包括發(fā)送節(jié)點;進而丟棄錯誤的報文,發(fā)送節(jié)點再進行報文的重新發(fā)送,保證傳遞信息的準確性。
2023-02-24 09:27:31898 為了防止故障節(jié)點干擾甚至阻塞整個CAN網(wǎng)絡(luò)系統(tǒng),CAN協(xié)議實現(xiàn)了復(fù)雜的故障限制機制。為了保證通信的正常,CAN 2.0 總線協(xié)議總線中各節(jié)點需要采取以下措施進行錯誤檢測:
2023-06-21 17:14:181840 
在運行過程中使用MCU內(nèi)嵌的CRC硬件模塊計算對應(yīng)代碼區(qū)域的CRC校驗碼,并和之前存儲的CRC校驗碼進行比較來檢查對應(yīng)代碼區(qū)域的完整性。
2023-10-27 11:49:22761 
沖突的方法 框架結(jié)構(gòu) 溝通程序 錯誤檢測等, 3個理由了解為什么CAN總線更好 CAN總線的顯著優(yōu)勢在于它高度靈活并提供許多獨特的功能,從而導(dǎo)致其他行業(yè)的采用率大幅增加。 CAN總線是一種
2023-04-03 14:32:15
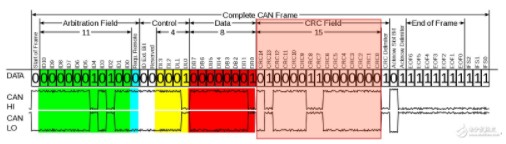
。在CAN總線通信過程中CAN控制器具備完整的錯誤檢測能力,其中包含:位錯誤檢測、格式錯誤檢測、填充錯誤檢測、應(yīng)答錯誤檢測和CRC錯誤檢測。作為一種重要的錯誤檢測手段,CRC錯誤檢測是接收節(jié)點判斷CAN幀信息的完整性并向總線確認應(yīng)答的依據(jù)。
2019-09-11 11:51:22
層完成數(shù)據(jù)打包/解包、幀編碼、媒體訪問管理、錯誤檢測、錯誤信令、應(yīng)答、串并轉(zhuǎn)換等功能。這些功能都是圍繞信息幀傳送過程展開的。3 CAN總線的報文傳輸和結(jié)構(gòu)報文類型 在CAN2.0B的版本協(xié)議中有兩種
2014-04-27 15:16:02
必須是相同的。? 傳輸層描述了 CAN 總線協(xié)議的內(nèi)核,它負責(zé)位時序(bit timing)、同步、仲裁、應(yīng)答、錯誤探測等。? 對象層負責(zé)報文的過濾、狀態(tài)和控制。? 應(yīng)用層完成用戶指定的數(shù)據(jù)傳輸任務(wù)。CAN 總線的物理層為數(shù)據(jù)通信提供了物理連接,而實際的數(shù)據(jù)通信在其他 3 層中完成。
2018-12-14 14:17:02
0.CAN總線錯誤分析與解決–講的最精辟的放在最前面我們知道CAN總線上的每個節(jié)點往總線上發(fā)送數(shù)據(jù)的同時會同時讀取總線上的數(shù)據(jù),并與自己發(fā)送的數(shù)據(jù)作對比。—CAN仲裁???CAN總線錯誤分別有發(fā)送
2022-01-14 06:55:10
我們先簡單總結(jié)一下CAN的錯誤處理與故障界定:1.CAN控制器記錄發(fā)生在發(fā)送/接收過程中,總線數(shù)據(jù)出現(xiàn)錯誤的總數(shù)(位錯誤,CRC錯誤等)。2.CAN控制器根據(jù)總線出錯數(shù)量由低到高,依次處于主動錯誤
2021-08-20 06:18:45
)子層完成數(shù)據(jù)打包/解包、幀編碼、媒體訪問管理、錯誤檢測、錯誤信令、應(yīng)答、串并轉(zhuǎn)換等功能。這些功能都是圍繞信息幀傳送過程展開的。3 CAN總線的報文傳輸和結(jié)構(gòu)報文類型 在CAN2.0B的版本協(xié)議中有
2014-04-18 16:36:30
控制芯片自動完成。 仲裁場、控制場、數(shù)據(jù)場由軟件編程配置SJA1000完成;幀起始、CRC場、應(yīng)答場、幀結(jié)束由CAN總線控制芯片SJA1000自動完成。 十、CAN的數(shù)據(jù)錯誤檢測: 不同于其它總線
2017-10-19 11:12:46
主動錯誤幀:用于發(fā)送節(jié)點或接收節(jié)點檢測出錯時向其他節(jié)點通知錯誤的幀。CAN總線一般存在五種錯誤:CRC錯誤、格式錯誤、應(yīng)答錯誤、位發(fā)送錯誤、位填充錯誤。5. 下圖是CAN過載幀:用于接收節(jié)點通知發(fā)送節(jié)點
2021-05-13 06:00:00
常有用。數(shù)據(jù)段長度最多為8個字節(jié),可滿足通常工業(yè)領(lǐng)域中控制命令、工作狀態(tài)及測試數(shù)據(jù)的一般要求。同時,8個字節(jié)不會占用總線時間過長,從而保證了通信的實時性。CAN協(xié)議采用CRC檢驗并可提供相應(yīng)的錯誤處理功能,保證
2015-11-05 17:17:31
Kb/s以下);6)通信速率最高可達1 Mb/s(此時通信距離最長為40 m);7)每幀信息都有CRC校驗及其他檢錯措施,保證了數(shù)據(jù)出錯率極低;8)CAN總線節(jié)點在錯誤嚴重的情況下具有自動關(guān)閉輸出的功能,以使總線上的其 他節(jié)點的操作不受影響。
2011-07-12 15:33:41
標(biāo)志進行標(biāo)定。當(dāng)任何節(jié)點檢測出位錯誤、填充錯誤、形式錯誤或應(yīng)答錯誤時,由該節(jié)點在下一位開始發(fā)送出錯誤標(biāo)志。在CAN總線中,任何一個單元可能處于下列3種故障狀態(tài)之一:錯誤激活狀態(tài)
2011-07-12 20:54:26
發(fā)送具有同一標(biāo)識符的數(shù)據(jù)幀。? 錯誤幀:任何單元檢測到總線錯誤就發(fā)出錯誤幀。? 過載幀:過載幀用在相鄰數(shù)據(jù)幀或遠程幀之間的提供附加的延時。數(shù)據(jù)幀下圖為基本的格式:CAN總線中有標(biāo)準幀和擴展幀兩種格式
2018-09-21 20:32:41
CAN 節(jié)點中設(shè)有錯誤檢測、標(biāo)定和自檢等措施。檢測錯誤包括多種方式,其中最常用、最有效的一種是 CRC 校驗。CRC 序列由循環(huán)冗余校驗碼求得的幀檢查序組成。為實現(xiàn) CRC 計算,被除的多項式系數(shù)由
2018-12-24 10:28:14
DELIMITER)和ACK界定符(ACK DELIMITER)。此主題相關(guān)圖片如下: 在CAN協(xié)議的錯誤檢測部分有這樣的描述:位錯誤:站單元在發(fā)送位的同時也對總線進行監(jiān)視。如果所發(fā)送的位值與所
2018-07-02 05:22:54
CAN通訊總線競爭數(shù)據(jù)保護物理設(shè)計總線邏輯錯誤檢測機制總線邏輯錯誤處理機制錯誤跟蹤機制POWER PC芯片 CAN配置總線競爭總線競爭解決的是在同一時間,多個節(jié)點同時向總線發(fā)送消息的問題。解決的方法
2022-01-13 06:16:09
工作至關(guān)重要,試想一下倘若生產(chǎn)線設(shè)備發(fā)送的位置信息在傳輸過程出現(xiàn)了錯誤,輕則可能造成生產(chǎn)癱瘓,重則可能導(dǎo)致設(shè)備損壞甚至人員傷害。在CAN總線通信過程中CAN控制器具備完整的錯誤檢測能力,其中包含:位錯誤
2019-09-25 15:41:50
目前在測試 nxp芯片can總線通信功能時出現(xiàn)一奇怪現(xiàn)象,在波特率為20k時,節(jié)點a以15ms時間間隔連續(xù)發(fā)送64幀數(shù)據(jù)過程中節(jié)點b發(fā)送一幀數(shù)據(jù)競爭無影響。當(dāng)節(jié)點a以9ms間隔連續(xù)發(fā)送64幀數(shù)
2019-08-17 21:11:11
通信速率為125Kbps~1Mbps的高速通信標(biāo)準,而ISO11519-2是針對通信速率為123Kbps以下的低速通信標(biāo)準CAN有很多優(yōu)點,比如多主控制,速度快,距離遠,具有錯誤檢測,恢復(fù),連接節(jié)點
2021-08-05 06:41:08
遠程幀來請求發(fā)送器發(fā)送數(shù)據(jù),具有和數(shù)據(jù)幀同樣的標(biāo)識符。? 出錯幀(Error Frame) 用來檢測 CAN 總線數(shù)據(jù)傳輸過程中的錯誤。? 超載幀(Overload Frame) 用于提供當(dāng)前和后續(xù)數(shù)據(jù)
2018-12-17 10:59:18
后放入 CRC 段發(fā)送。接收節(jié)點也對 CRC 計算區(qū)域進行 CRC 計算,并與收到的 CRC 域進行對比,若 CRC 對比結(jié)果有誤則向總線發(fā)送錯誤幀,若對比結(jié)果正確則隨后發(fā)送應(yīng)答。ACK 段:含應(yīng)答位
2021-12-27 19:05:53
SPI在通信的過程中如果設(shè)備地址錯誤還能正常通信嗎
2023-10-13 06:25:08
,斷電,拔掉跳線帽,使boot=0,重新上電,不可以與板1CAN通信,板子復(fù)位一次,可以與板1通信。(有的時候可能要復(fù)位好幾次CAN才能通信)。4、通信過程中拔掉CAN總線,重新連接之后,可以通信
2018-08-19 06:26:26
)方案,CAN-FD繼承了傳統(tǒng)CAN總線的主要特性,使用改動較小的物理層,雙線串行通信協(xié)議,依然基于非破壞性仲裁技術(shù),分布式實時控制,可靠的錯誤處理和檢測機制,在此基礎(chǔ)上對帶寬和數(shù)據(jù)長度進行優(yōu)化,將逐步
2023-02-14 14:22:23
串口在通信的過程中怎么對數(shù)據(jù)進行校驗
2023-10-11 07:13:25
對多點及全局廣播等幾種方式傳送數(shù)據(jù),無需專門的調(diào)度。? CAN 總線的數(shù)據(jù)采用短幀結(jié)構(gòu),傳輸時間短,受干擾概率低,具有極好的檢錯效果。? CAN 總線采用 CRC 檢驗并可提供相應(yīng)的錯誤處理功能,保證了
2018-12-13 14:26:31
單片機要與上位機通過can總線進行通信,怎樣構(gòu)建硬件電路及程序編寫,求各位大神指導(dǎo)啊……
2014-08-08 13:59:59
你好,我已經(jīng)在DSPIC30F4011控制器和DSP德克薩斯控制器之間建立了通信。但我在通信過程中遇到了總線錯誤,如何解決。 以上來自于百度翻譯 以下為原文 Hi I have
2018-09-03 16:24:26
,不會出現(xiàn)網(wǎng)絡(luò)癱瘓,從而提高整個系統(tǒng)的穩(wěn)定性。cAN協(xié)議采用CRc檢驗并可提供相應(yīng)的錯誤處理功能,保證了數(shù)據(jù)通信的可靠性。同時,由于cAN總線的系統(tǒng)靈活,其節(jié)點可以在不要求現(xiàn)存節(jié)點及其應(yīng)用層改變?nèi)魏诬浖蛴布那闆r下,接入cAN網(wǎng)絡(luò),大大提高了系統(tǒng)的可擴充的能力。
2023-09-19 06:45:45
該系統(tǒng)的硬件構(gòu)成、芯片選擇和組成原理, 對FPGA的控制程序進行了分析和設(shè)計; 實驗結(jié)果表明, 系統(tǒng)完全滿足CAN總線通信要求, 與以往基于單片機的CAN總線通信系統(tǒng)相比較, 降低了體積、重量和功耗, 具有優(yōu)越性; 該設(shè)計已成功應(yīng)用于星載電場儀的地面檢測設(shè)備中。
2012-08-11 11:55:19
;壓力傳感器 SP30;CAN 總線;低頻喚醒;汽車在高速行駛過程中,輪胎氣壓不足易導(dǎo)致爆胎。爆胎是引起交通事故的主要原因。輪胎壓力檢測系統(tǒng)(TPMS) 的作用是在汽車行駛過程中對輪胎氣壓進行實時檢測,并
2009-05-17 11:55:19
如何在STM32CubeMX中進行串口通信的配置?
2021-12-13 06:27:04
如何在STM32CubeMX中進行串口通信的配置?
2022-02-18 07:34:03
如何在android中進行驅(qū)動呢?并輸出dev和sys中的界面用程序調(diào)用呢?
2022-03-02 09:53:03
我的要求是進行ROM測試,以便在執(zhí)行代碼之前 CAN 驗證沒有數(shù)據(jù)損壞。 我在用戶手冊中找到了該部分(11.5.6.1 SRI ECC(安全獲取路徑)),但這會在代碼獲取過程中顯示錯誤。 CAN 您提供任何替代方法。
2024-01-30 06:22:52
在開發(fā)板上有CAN總線,怎樣來進行CAN總線的通信呢?希望能普及一下這方面的知識或者提供些相關(guān)的例程。如果有高手做過,請介紹一下開發(fā)的過程。
2019-09-30 04:35:02
的數(shù)據(jù)而被終止。 6 CAN可靠性為防止汽車在使用壽命期內(nèi)由于數(shù)據(jù)交換錯誤而對司機造成危險,汽車的安全系統(tǒng)要求數(shù)據(jù)傳輸具有較高的安全性。如果數(shù)據(jù)傳輸?shù)目煽啃宰銐蚋?或者殘留下來的數(shù)據(jù)錯誤足夠低的話,這一目標(biāo)不難實現(xiàn)。從總線系統(tǒng)數(shù)據(jù)的角度看,可靠性可以理解為,對傳輸過程產(chǎn)生的數(shù)據(jù)錯誤的識別能力。
2015-07-10 14:09:37
1.在CAN總線中存在5種錯誤類型,它們互相并不排斥,下面介紹一下它們的區(qū)別方式、產(chǎn)生的原因以及處理方法。l位錯誤,CAN網(wǎng)絡(luò)某個節(jié)點在向總線發(fā)送一個位的同時也在監(jiān)測總線,當(dāng)檢測到總線位的電平
2015-07-09 13:54:46
介紹CAN 總線及其通信協(xié)議J1939, 并設(shè)計基于CAN 總線的多ECU 通信平臺的硬件結(jié)構(gòu); 闡述節(jié)點ECU 通信的軟件設(shè)計方法,在仿真試驗的條件下實現(xiàn)數(shù)據(jù)通信的功能。試驗表明該平臺運行
2009-04-15 09:49:53 22
22 CAN總線通信,不僅能夠有效地提升整個電氣控制系統(tǒng)的運作效率,降低使用成本和維修費用。而且,CAN通信協(xié)議采用CRC檢驗,可提供相應(yīng)的錯誤處理功能,保證了數(shù)據(jù)通信的可
2022-08-30 16:20:15
介紹CAN 總線及其通信協(xié)議J1939, 并設(shè)計基于CAN 總線的多ECU 通信平臺的硬件結(jié)構(gòu); 闡述節(jié)點ECU 通信的軟件設(shè)計方法,在仿真試驗的條件下實現(xiàn)數(shù)據(jù)通信的功能。試驗表明該平臺運行
2009-05-16 14:19:0828 本設(shè)計為光電穩(wěn)定跟蹤平臺開發(fā)CAN 驅(qū)動,以實現(xiàn)CAN 總線上設(shè)備間的通信。分析了linux 下標(biāo)準設(shè)備驅(qū)動機制和CAN 總線通信模型,給出了光電穩(wěn)定跟蹤平臺中CAN 總線通信的硬件設(shè)計
2009-08-04 08:33:4830 摘要:介紹CAN總線及其通信協(xié)議J1939,并設(shè)計基于CAN總線的多ECN通信平臺的硬件結(jié)構(gòu);闡述節(jié)點ECN通信的軟件設(shè)計方法,在仿真試驗的條件下實現(xiàn)數(shù)
2006-03-11 13:21:031634 
CAN總線通信電路
2008-10-14 13:59:176323 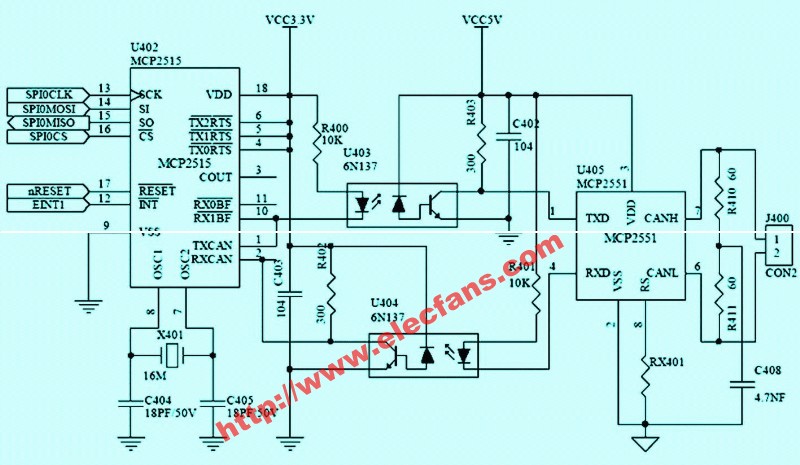
CAN總線在糧情自動檢測系統(tǒng)中的應(yīng)用
介紹基于CAN的糧情自動檢測系統(tǒng)的設(shè)計,著重討論了利用CAN總線進行通信的通信規(guī)程。 關(guān)鍵詞:糧情;自動檢測
2009-05-26 16:20:03904 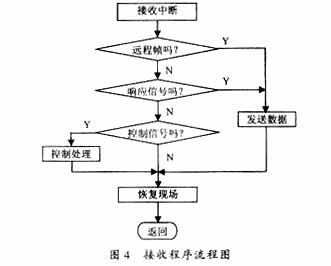
向總線送出一位的某個節(jié)點同時也在監(jiān)視總線,當(dāng)監(jiān)視到總線位的電平與送出的電平不同時9則在該位時刻檢測到一個位錯誤。
2011-08-08 14:01:2011171 為了解決在工業(yè)生產(chǎn)中遇到的現(xiàn)場檢測信息的采集、處理和同步等問題,提出了實現(xiàn)過程分析儀器CAN 總線網(wǎng)絡(luò)通信的方法。根據(jù)項目的設(shè)計要求,制定了適用的CAN 應(yīng)用層協(xié)議,編寫了各
2011-10-12 14:29:302279 
設(shè)計了多個CAN總線的通信節(jié)點,通過PCI9810-CAN適配卡上的CAN總線,組成一個局域通信網(wǎng)絡(luò),實現(xiàn)了PC機對各個節(jié)點的監(jiān)控和通信以及節(jié)點間的自由通信。
2011-10-19 14:57:5667 基于對CAN 總線控制器的功能分析, 并應(yīng)用Verilog語言進行軟件設(shè)計, 從而實現(xiàn)CAN節(jié)點之間的通信功能。
2012-04-28 09:56:5413818 
基于CAN總線系統(tǒng)結(jié)構(gòu)構(gòu)成,通過工程實踐的具體應(yīng)用以及對CAN控制器及收發(fā)器硬件結(jié)構(gòu)的深入理解,并從通信的角度出發(fā)著重深入分析了CAN總線通信的節(jié)點同步機制、總線地址機制、總
2012-05-08 15:23:04404 crc校驗原理 利用CRC進行檢錯的過程可簡單描述為:在發(fā)送端根據(jù)要傳送的k位二進制碼序列,以一定的規(guī)則產(chǎn)生一個校驗用的r位監(jiān)督碼(CRC碼),附在原始信息后邊,構(gòu)成一個新的二進制
2012-09-05 09:26:4734153 
CAN總線通信詳解。
2016-03-30 16:46:100 基于CAN總線智能檢測儀的設(shè)計_吳文珍
2017-01-21 12:21:100 局部錯誤,全局通知是CAN總線錯誤類型中較為典型的一種,如何通過錯誤報文及波形快速定位錯誤原因呢?本文結(jié)合現(xiàn)場實測案例簡要分析。 一、CAN總線錯誤簡介 在CAN總線中存在5種錯誤類型,如圖1所示
2017-11-08 10:48:573 CAN-bus是實時性很強的總線,多主機廣播式結(jié)構(gòu),自動優(yōu)先級仲裁,具有傳輸錯誤自動重發(fā),自動CRC校驗接收,錯誤率小于10-9的特點。
2017-12-26 15:14:0518 局部錯誤,全局通知是CAN總線錯誤類型中較為典型的一種,如何通過錯誤報文及波形快速定位錯誤原因呢?本文結(jié)合現(xiàn)場實測案例簡要分析。
2018-02-16 07:57:006974 
本文主要介紹了CAN總線遠程幀和錯誤幀,首先我們先來了解了解一下通訊時使用的幀類型有哪些,他們的作用又是什么,具體的跟隨小編一起來了解一下吧。
2018-05-07 11:30:2125382 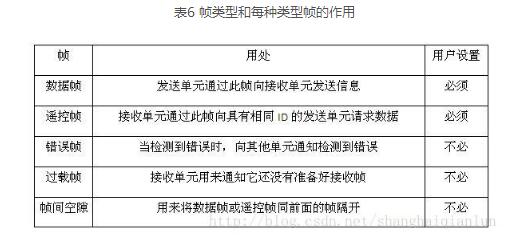
本文主要介紹的是遙控器集成檢測系統(tǒng)檢測CAN總線遙控器操作過程,具體的步驟跟隨小編一起來了解一下。
2018-05-07 17:46:246493 你了解CAN總線嗎?你知道總線中有哪些錯誤嗎?你想了解總線中的錯誤是如何校驗以及錯誤之間的關(guān)系嗎?下文為大家揭開它神秘的面紗。
2018-06-26 10:29:2728435 
在理解了CAN總線的自通信程序后,再來探討CAN總線間的相互通信變得容易了許多。對于是自通信還是相互通信,這個肯定是需要對寄存器進行必要的設(shè)置 的,分析PIAE的兩個程序后不難發(fā)現(xiàn),自通信和互通信
2018-09-21 15:06:021466 此CAN總線上有干擾,導(dǎo)致CAN控制器發(fā)生接收錯誤,CAN總線上的信號經(jīng)過收發(fā)器轉(zhuǎn)化為差分電平信號,此時信號容易受到外界干擾,這樣容易使CAN控制器發(fā)生接收錯誤。
2018-10-08 14:31:514590 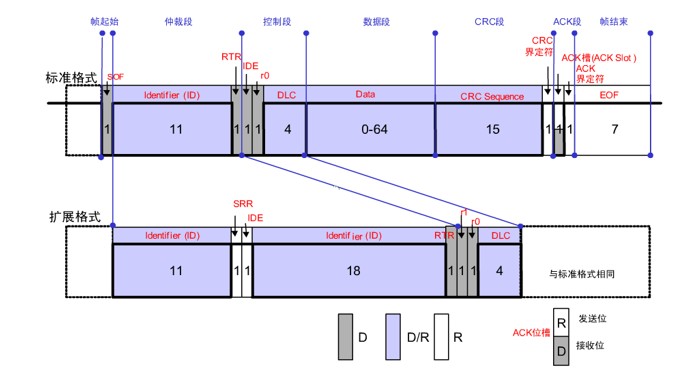
CAN總線邊沿時間會影響采樣正確性,而采樣錯誤會造成錯誤幀不斷出現(xiàn),影響CAN總線通信。
2018-11-23 14:04:277540 
應(yīng)用于安防系統(tǒng)對家居智能化發(fā)展起到了良好的促進作用。CAN總線是一種應(yīng)用較為廣泛的現(xiàn)場總線,它支持多主節(jié)點,有完善的錯誤處理機制,通信速率快,傳送距離遠,可掛接控制設(shè)備多。
2019-05-15 18:09:002 CRC 校驗是一種在數(shù)據(jù)通信系統(tǒng)和其它串行傳輸系統(tǒng)中廣泛使用的錯誤檢測手段。通用的CRC 標(biāo)準有CRC-8、CRC-16、CRC-32、CRC-CCIT,其中在網(wǎng)絡(luò)通信系統(tǒng)中應(yīng)用最廣
2019-08-06 16:39:1436 本文檔的主要內(nèi)容詳細介紹的是CAN總線基礎(chǔ)的詳細資料概述包括了:概述,汽車總線與CAN標(biāo)準,CAN的通信機制,數(shù)據(jù)幀,錯誤檢測與錯誤幀,CAN的幀格式,位定時與同步
2019-11-29 15:31:20105 本文在分析can總線航天應(yīng)用的基礎(chǔ)上,從硬件原理設(shè)計、cpu與can總線接口實現(xiàn)以及can總線通信軟件設(shè)計等方面進行了論述。
2020-04-02 09:53:062836 
為獲得安全的數(shù)據(jù)發(fā)送,CAN總線采取錯誤檢測和處理的措施,在報文傳輸過程中設(shè)有位錯誤、填充錯誤、CRC錯誤、格式錯誤和應(yīng)答錯誤5種錯誤類型,對于故障的界定有“錯誤激活”、“錯誤認可”和“總線關(guān)閉”3種狀態(tài)。
2020-04-04 10:44:00969 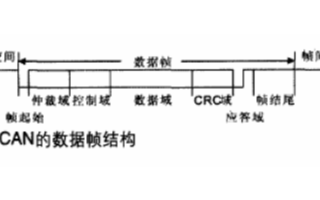
傳統(tǒng)CAN以及目前CAN FD采取的校驗機制,保證傳輸過程中遭受破壞的幀數(shù)據(jù)幾乎不會被接收以及應(yīng)答成功,能有效防止物理層傳輸錯誤,讓用戶界面不需要額外關(guān)注幀傳輸數(shù)據(jù)的正確性。
2020-12-26 02:32:251116 CRC 序列包括發(fā)送器的CRC 計算結(jié)果。接收器計算CRC 的方法與發(fā)送器相同。如果計算結(jié)果與接收到CRC 序列的結(jié)果不相符,則檢測到一個CRC 錯誤。
2021-04-02 11:17:492472 
CAN總線通信協(xié)議詳細如下。
2021-04-19 16:54:3875 CAN總線在COD檢測中的應(yīng)用說明。
2021-04-19 17:17:477 在本系列文章中,我們將為您詳細介紹CAN總線錯誤的相關(guān)知識,包括CAN總線錯誤的基礎(chǔ)概念、CAN總線錯誤的類型、CAN錯誤幀和CAN節(jié)點錯誤狀態(tài),并通過實際的應(yīng)用測試生成并記錄CAN錯誤。
2022-05-27 17:56:122636 在本系列文章中,我們將為您詳細介紹CAN總線錯誤的相關(guān)知識,包括CAN總線錯誤的基礎(chǔ)概念、CAN總線錯誤的類型、CAN錯誤幀和CAN節(jié)點錯誤狀態(tài),并通過實際的應(yīng)用測試生成并記錄CAN錯誤。
2022-06-13 16:08:347206 在本文中將繼續(xù)為大家深入講解CAN總線的位填充機制、錯誤檢測和故障界定、網(wǎng)絡(luò)拓撲、終端匹配、電纜與接線、差分信號電壓幅值。
2023-02-09 11:05:201039 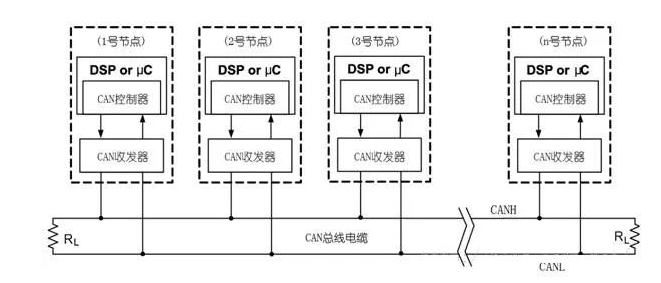
節(jié)點的硬件接口電路。基于對CAN 總線控制器的功能分析, 并應(yīng)用Verilog語言進行軟件設(shè)計, 從而實現(xiàn)CAN節(jié)點之間的通信功能。 0 引言 CAN 總線允許高達1M bit /s通訊速率, 支持多主通訊模式, 有高抗電磁干擾性而且能夠檢測出通信過程中產(chǎn)生的任何錯誤, 已被廣泛應(yīng)用到各自動
2023-06-18 11:15:011796 錯誤幀種類分為5種,分別是:位發(fā)送錯誤、ACK錯誤、位填充錯誤、CRC錯誤、格式錯誤。
2023-06-19 17:25:332455 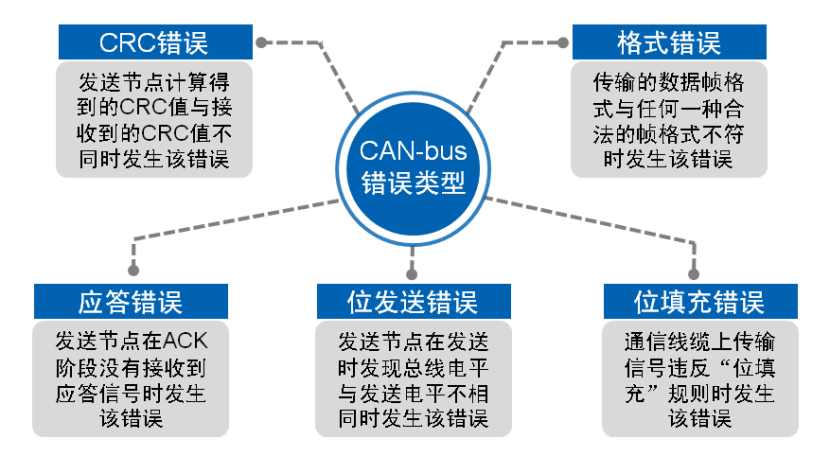
AsimpleintrotoCANerrorsCAN總線錯誤介紹在本系列文章中,我們將為您詳細介紹CAN總線錯誤的相關(guān)知識,包括CAN總線錯誤的基礎(chǔ)概念、CAN總線錯誤的類型、CAN錯誤幀和CAN
2022-06-09 09:46:531176 
AsimpleintrotoCANerrorsCAN總線錯誤介紹在本系列文章中,我們將為您詳細介紹CAN總線錯誤的相關(guān)知識,包括CAN總線錯誤的基礎(chǔ)概念、CAN總線錯誤的類型、CAN錯誤幀和CAN
2022-06-09 09:46:031410 AsimpleintrotoCANerrorsCAN總線錯誤介紹在本系列文章中,我們將為您詳細介紹CAN總線錯誤的相關(guān)知識,包括CAN總線錯誤的基礎(chǔ)概念、CAN總線錯誤的類型、CAN錯誤幀和CAN
2022-05-27 10:39:213329 AsimpleintrotoCANerrorsCAN總線錯誤介紹在本系列文章中,我們將為您詳細介紹CAN總線錯誤的相關(guān)知識,包括CAN總線錯誤的基礎(chǔ)概念、CAN總線錯誤的類型、CAN錯誤幀和CAN
2022-06-02 09:41:24813 AsimpleintrotoCANerrorsCAN總線錯誤介紹在本系列文章中,我們將為您詳細介紹CAN總線錯誤的相關(guān)知識,包括CAN總線錯誤的基礎(chǔ)概念、CAN總線錯誤的類型、CAN錯誤幀和CAN
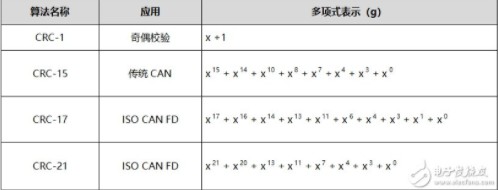
2022-06-09 10:21:001083 :不同數(shù)據(jù)段長度選擇不同的CRC多項式傳統(tǒng)CAN采用的是15位的CRC校驗,由于CANFD支持更大的數(shù)據(jù)量,為提供通信可靠性,針對不同長度的CANFD報文,調(diào)整其CRC
2022-07-21 16:26:07441 
錯誤幀的基礎(chǔ)知識錯誤幀的作用錯誤幀是CAN總線用于進行錯誤通知的報文,可以將任何一個節(jié)點發(fā)現(xiàn)的錯誤通知給其他節(jié)點,包括發(fā)送節(jié)點;進而丟棄錯誤的報文,發(fā)送節(jié)點再進行報
2023-02-23 15:11:521671 
認識CAN 總線錯誤的第一步就是了解認識CAN 總線協(xié)議和它的具體功能,這樣才能更容易地理解CAN 總線是如何去發(fā)現(xiàn)并解決錯誤的。
2023-08-14 15:18:463228 
中,每一個節(jié)點都有一個CAN控制器,CAN控制器通過內(nèi)部寄存器和接口與CAN總線連接。其中,在CAN傳輸過程中,如果出現(xiàn)錯誤,會在CAN控制器內(nèi)部錯誤寄存器中記錄錯誤信息。因此,在使用STM32進行CAN接收/發(fā)送時,及時清零錯誤寄存器是非常重要的。 一、STM32的CA
2023-09-14 14:22:312419 功能失等。 這是因為相關(guān)數(shù)據(jù)或信息是通過CAN總線傳輸?shù)模绻麄鬏斒。敲磿a(chǎn)生多種連帶故障,甚至造成整個網(wǎng)絡(luò)系統(tǒng)癱瘓。 最為常見的故障癥狀是儀表板的顯示異常,如下圖所示。 在檢修過程中,首先應(yīng)查看具體的故障癥狀,根據(jù)故障癥狀
2023-09-14 16:30:071595 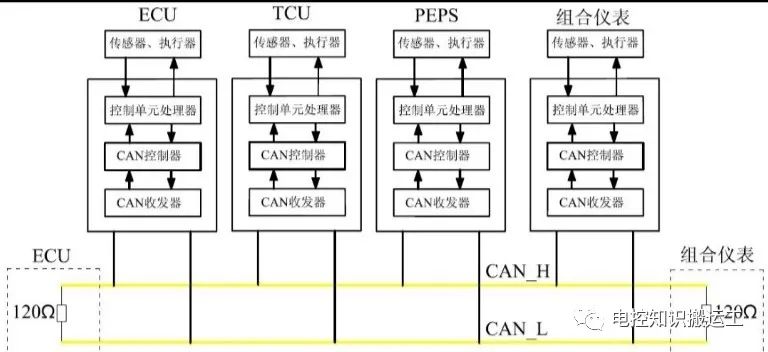
導(dǎo)讀: CRC校驗(循環(huán)冗余校驗)是數(shù)據(jù)通訊中最常采用的校驗方式。CAN協(xié)議中,總線通信節(jié)點也常采用CRC算法對各種總線傳輸?shù)臄?shù)據(jù)進行校驗。CRC8校驗在整車通信系統(tǒng)中應(yīng)用比較廣泛,鑒于此,本篇
2024-01-02 10:45:16169 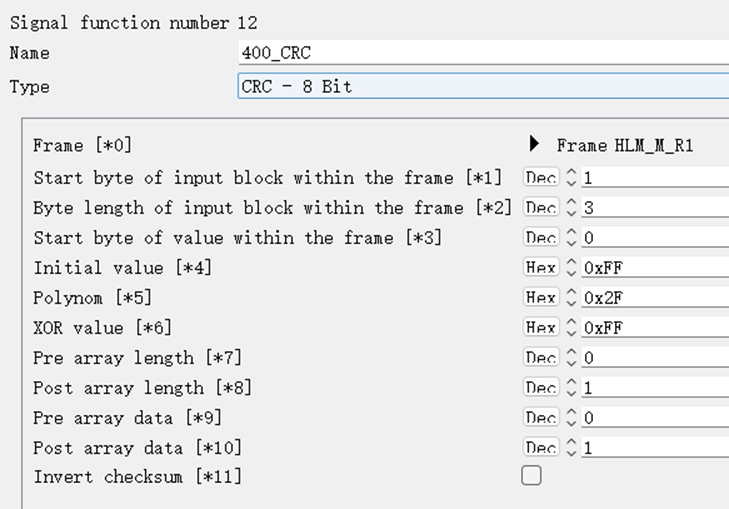
。而CAN 2.0B不僅支持CAN 2.0A的幀格式,還增加了錯誤檢測和錯誤報告功能,最大傳輸速率可達到1 M
2024-01-31 14:09:01497
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論