 電子發(fā)燒友App
電子發(fā)燒友App


CAN(Controller Area Network)即控制器局域網(wǎng),是一種能夠?qū)崿F(xiàn)分布式實(shí)時(shí)控制的串行通信網(wǎng)絡(luò)。
想到CAN就要想到德國的Bosch公司,因?yàn)镃AN就是這個(gè)公司開發(fā)的(和Intel)CAN有很多優(yōu)秀的特點(diǎn),使得它能夠被廣泛的應(yīng)用。比如:傳輸速度最高到1Mbps,通信距離最遠(yuǎn)到10km,無損位仲裁機(jī)制,多主結(jié)構(gòu)。
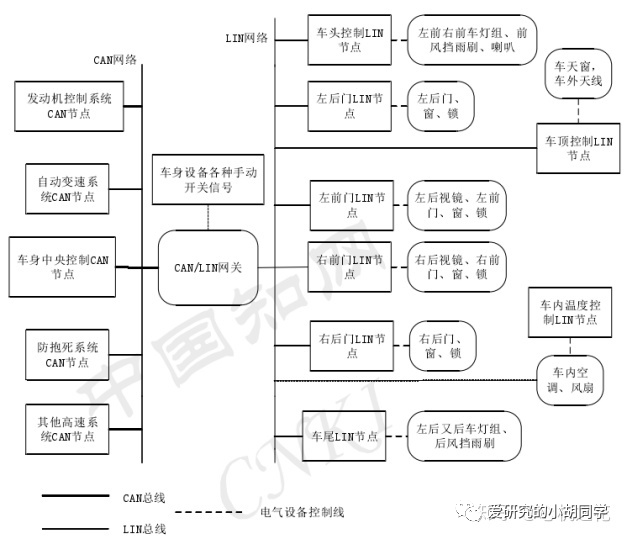
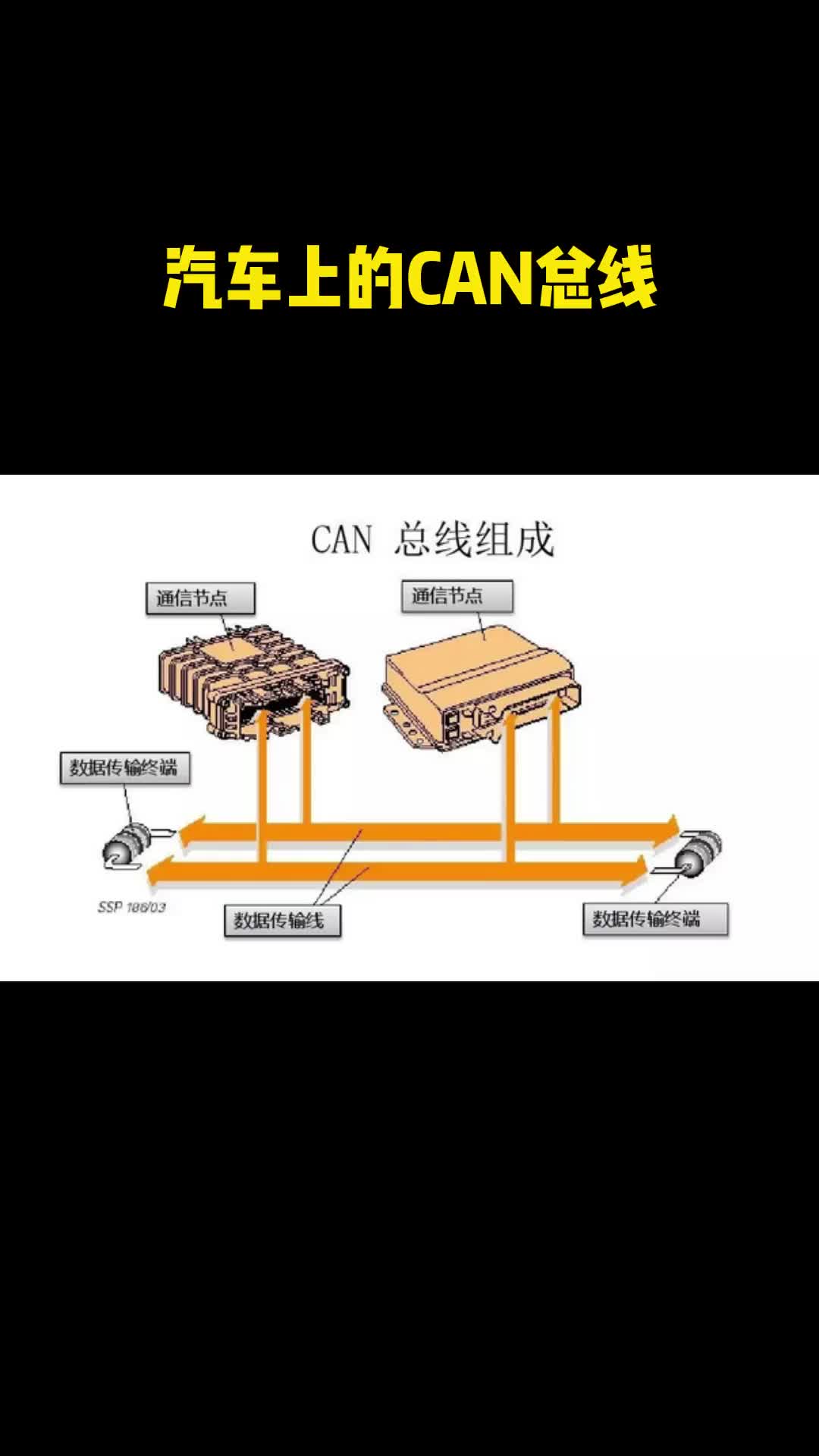
近些年來,CAN控制器價(jià)格越來越低,很多MCU也集成了CAN控制器。現(xiàn)在每一輛汽車上都裝有CAN總線。
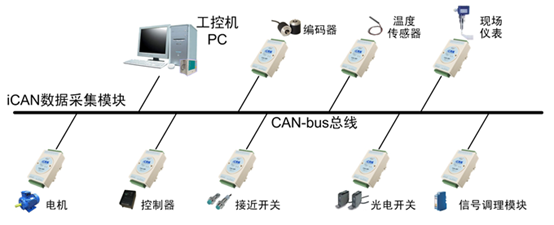
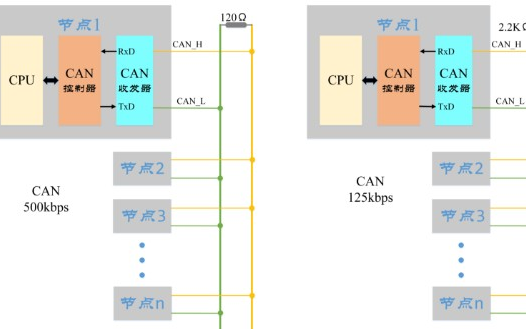
一個(gè)典型的CAN應(yīng)用場景:
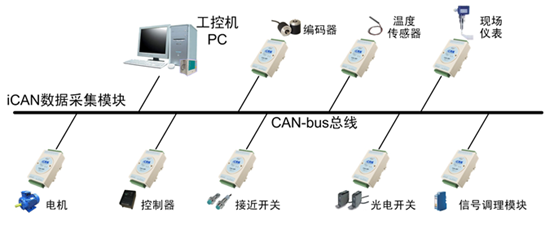
?
CAN總線標(biāo)準(zhǔn)
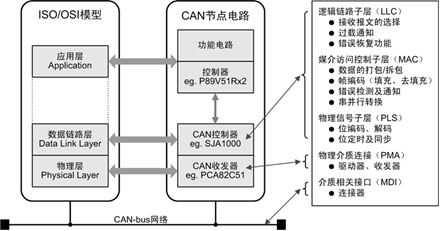
CAN總線標(biāo)準(zhǔn)只規(guī)定了物理層和數(shù)據(jù)鏈路層,需要用戶自定義應(yīng)用層。不同的CAN標(biāo)準(zhǔn)僅物理層不同。
?
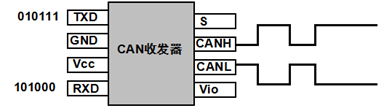
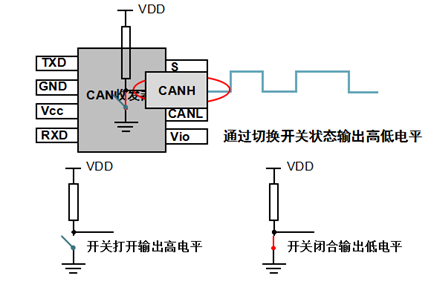
CAN收發(fā)器負(fù)責(zé)邏輯電平和物理信號之間的轉(zhuǎn)換。
?
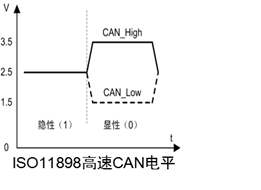
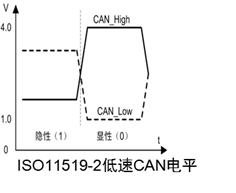
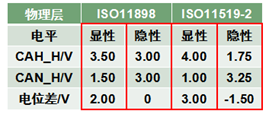
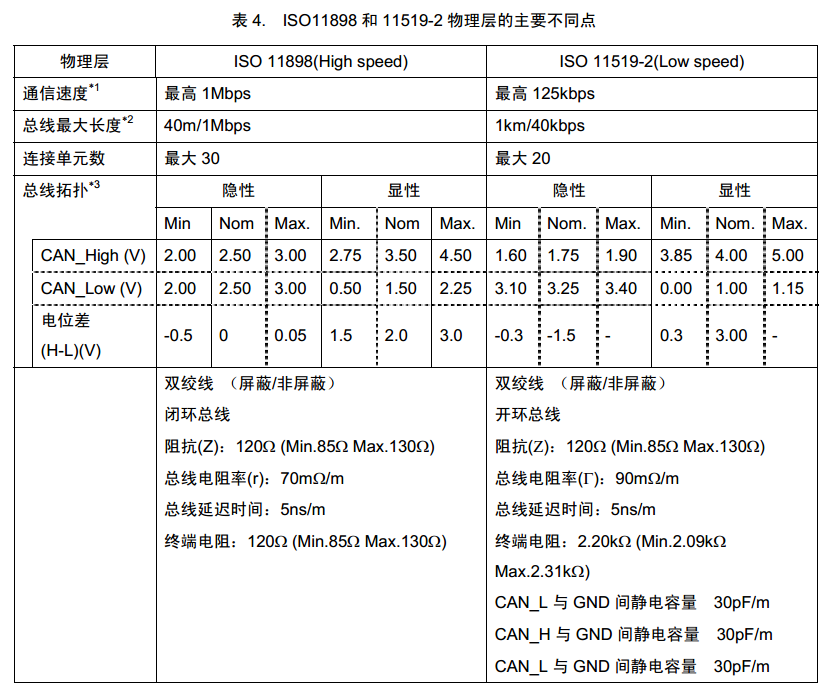
將邏輯信號轉(zhuǎn)換成物理信號(差分電平),或者將物理信號轉(zhuǎn)換成邏輯電平。CAN標(biāo)準(zhǔn)有兩個(gè),即IOS11898和IOS11519,兩者差分電平特性不同。
?
高低電平幅度低,對應(yīng)的傳輸速度快;
?
?
*雙絞線共模消除干擾,是因?yàn)殡娖酵瑫r(shí)變化,電壓差不變。
物理層
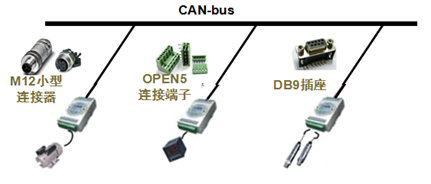
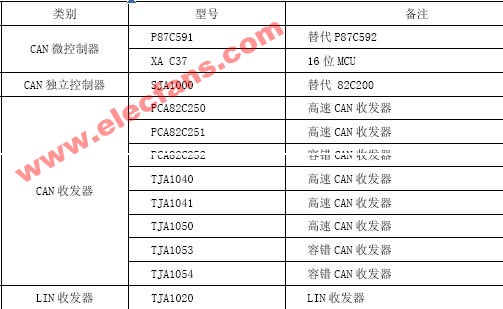
CAN有三種接口器件
?
?
多個(gè)節(jié)點(diǎn)連接,只要有一個(gè)為低電平,總線就為低電平,只有所有節(jié)點(diǎn)輸出高電平時(shí),才為高電平。所謂"線與"。 CAN總線有5個(gè)連續(xù)相同位后,就插入一個(gè)相反位,產(chǎn)生跳變沿,用于同步。從而消除累積誤差。
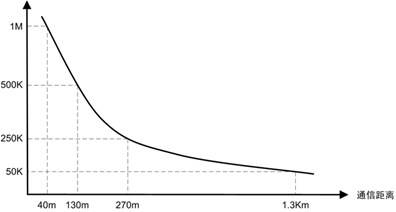
和485、232一樣,CAN的傳輸速度與距離成反比。
?
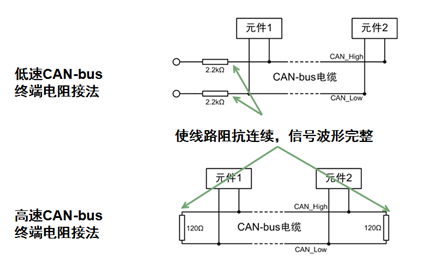
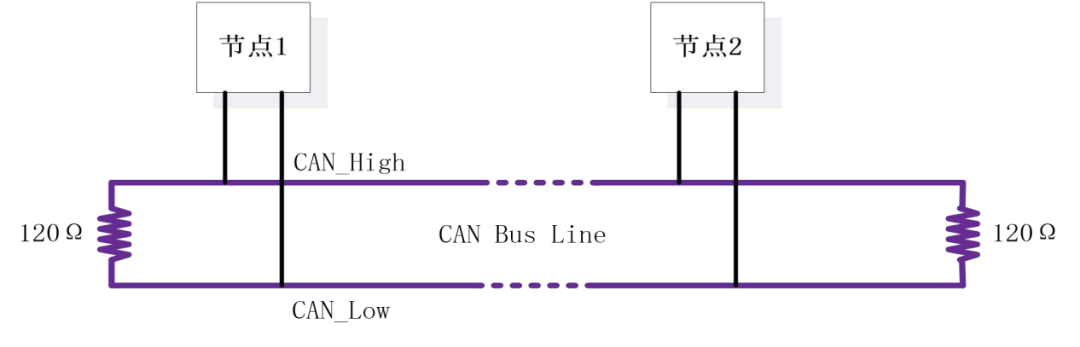
CAN總線,終端電阻的接法:
?
為什么是120Ω,因?yàn)殡娎|的特性阻抗為120Ω,為了模擬無限遠(yuǎn)的傳輸線
數(shù)據(jù)鏈路層
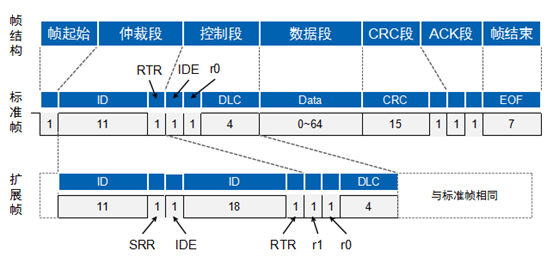
CAN總線傳輸?shù)氖荂AN幀,CAN的通信幀分成五種,分別為數(shù)據(jù)幀、遠(yuǎn)程幀、錯(cuò)誤幀、過載幀和幀間隔。 數(shù)據(jù)幀用來節(jié)點(diǎn)之間收發(fā)數(shù)據(jù),是使用最多的幀類型;遠(yuǎn)程幀用來接收節(jié)點(diǎn)向發(fā)送節(jié)點(diǎn)接收數(shù)據(jù);錯(cuò)誤幀是某節(jié)點(diǎn)發(fā)現(xiàn)幀錯(cuò)誤時(shí)用來向其他節(jié)點(diǎn)通知的幀;過載幀是接收節(jié)點(diǎn)用來向發(fā)送節(jié)點(diǎn)告知自身接收能力的幀;用于將數(shù)據(jù)幀、遠(yuǎn)程幀與前面幀隔離的幀。 數(shù)據(jù)幀根據(jù)仲裁段長度不同分為標(biāo)準(zhǔn)幀(2.0A)和擴(kuò)展幀(2.0B)
幀起始
?
幀起始由一個(gè)顯性位(低電平)組成,發(fā)送節(jié)點(diǎn)發(fā)送幀起始,其他節(jié)點(diǎn)同步于幀起始; 幀結(jié)束由7個(gè)隱形位(高電平)組成。
仲裁段
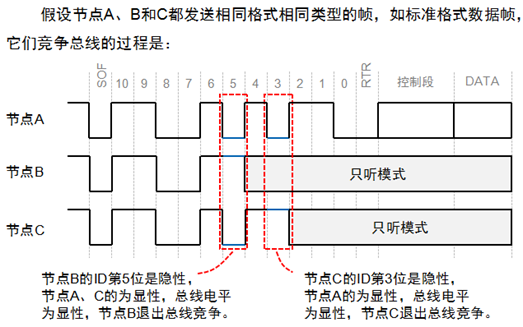
CAN總線是如何解決多點(diǎn)競爭的問題? 由仲裁段給出答案。 CAN總線控制器在發(fā)送數(shù)據(jù)的同時(shí)監(jiān)控總線電平,如果電平不同,則停止發(fā)送并做其他處理。如果該位位于仲裁段,則退出總線競爭;如果位于其他段,則產(chǎn)生錯(cuò)誤事件。
?
幀ID越小,優(yōu)先級越高。由于數(shù)據(jù)幀的RTR位為顯性電平,遠(yuǎn)程幀為隱性電平,所以幀格式和幀ID相同的情況下,數(shù)據(jù)幀優(yōu)先于遠(yuǎn)程幀;由于標(biāo)準(zhǔn)幀的IDE位為顯性電平,擴(kuò)展幀的IDE位為隱形電平,對于前11位ID相同的標(biāo)準(zhǔn)幀和擴(kuò)展幀,標(biāo)準(zhǔn)幀優(yōu)先級比擴(kuò)展幀高。
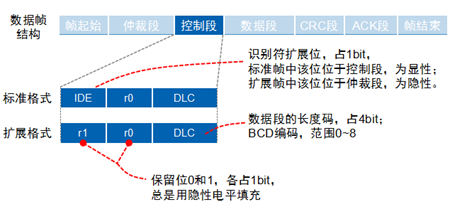
控制段
共6位,標(biāo)準(zhǔn)幀的控制段由擴(kuò)展幀標(biāo)志位IDE、保留位r0和數(shù)據(jù)長度代碼DLC組成;擴(kuò)展幀控制段則由IDE、r1、r0和DLC組成。
?
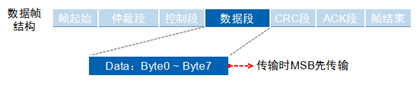
數(shù)據(jù)段
為0-8字節(jié),短幀結(jié)構(gòu),實(shí)時(shí)性好,適合汽車和工控領(lǐng)域;
?
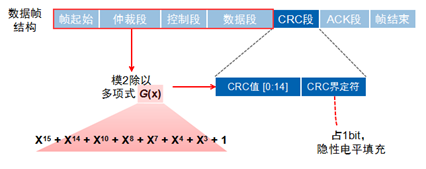
CRC段
CRC校驗(yàn)段由15位CRC值和CRC界定符組成。
?
ACK段
當(dāng)接收節(jié)點(diǎn)接收到的幀起始到CRC段都沒錯(cuò)誤時(shí),它將在ACK段發(fā)送一個(gè)顯性電平,發(fā)送節(jié)點(diǎn)發(fā)送隱性電平,線與結(jié)果為顯性電平。
遠(yuǎn)程幀
遠(yuǎn)程幀分為6個(gè)段,也分為標(biāo)準(zhǔn)幀和擴(kuò)展幀,且RTR位為1(隱性電平)

?
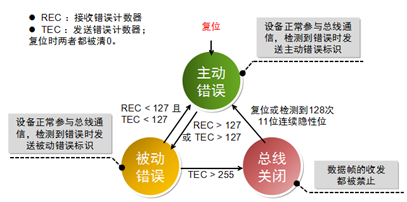
CAN是可靠性很高的總線,但是它也有五種錯(cuò)誤。CRC錯(cuò)誤:發(fā)送與接收的CRC值不同發(fā)生該錯(cuò)誤;格式錯(cuò)誤:幀格式不合法發(fā)生該錯(cuò)誤;應(yīng)答錯(cuò)誤:發(fā)送節(jié)點(diǎn)在ACK階段沒有收到應(yīng)答信息發(fā)生該錯(cuò)誤;位發(fā)送錯(cuò)誤:發(fā)送節(jié)點(diǎn)在發(fā)送信息時(shí)發(fā)現(xiàn)總線電平與發(fā)送電平不符發(fā)生該錯(cuò)誤;位填充錯(cuò)誤:通信線纜上違反通信規(guī)則時(shí)發(fā)生該錯(cuò)誤。當(dāng)發(fā)生這五種錯(cuò)誤之一時(shí),發(fā)送節(jié)點(diǎn)或接受節(jié)點(diǎn)將發(fā)送錯(cuò)誤幀為防止某些節(jié)點(diǎn)自身出錯(cuò)而一直發(fā)送錯(cuò)誤幀,干擾其他節(jié)點(diǎn)通信,CAN協(xié)議規(guī)定了節(jié)點(diǎn)的3種狀態(tài)及行為
?
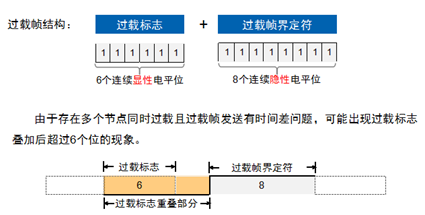
過載幀
當(dāng)某節(jié)點(diǎn)沒有做好接收的"準(zhǔn)備"時(shí),將發(fā)送過載幀,以通知發(fā)送節(jié)點(diǎn)。
?
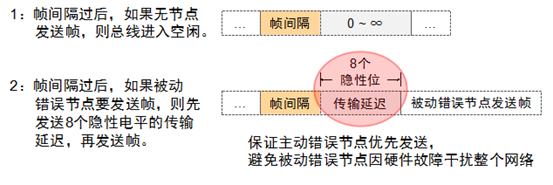
幀間隔
用來隔離數(shù)據(jù)幀、遠(yuǎn)程幀與他們前面的幀,錯(cuò)誤幀和過載幀前面不加幀間隔。
?
構(gòu)建CAN節(jié)點(diǎn)
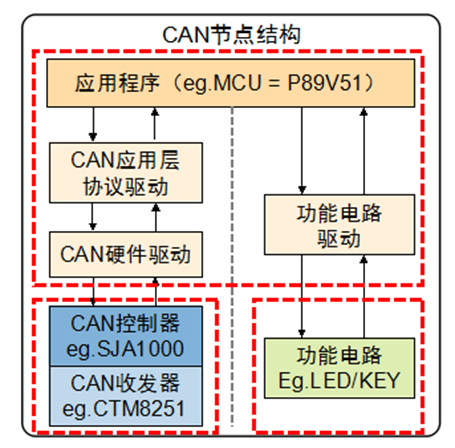
構(gòu)建節(jié)點(diǎn),實(shí)現(xiàn)相應(yīng)控制,由底向上分為四個(gè)部分:CAN節(jié)點(diǎn)電路、CAN控制器驅(qū)動(dòng)、CAN應(yīng)用層協(xié)議、CAN節(jié)點(diǎn)應(yīng)用程序。 雖然不同節(jié)點(diǎn)完成的功能不同,但是都有相同的硬件和軟件結(jié)構(gòu)。
?
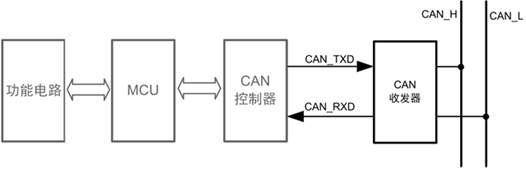
CAN收發(fā)器和控制器分別對應(yīng)CAN的物理層和數(shù)據(jù)鏈路層,完成CAN報(bào)文的收發(fā);功能電路,完成特定的功能,如信號采集或控制外設(shè)等;主控制器與應(yīng)用軟件按照CAN報(bào)文格式解析報(bào)文,完成相應(yīng)控制。
CAN硬件驅(qū)動(dòng)是運(yùn)行在主控制器(如P89V51)上的程序,它主要完成以下工作:基于寄存器的操作,初始化CAN控制器、發(fā)送CAN報(bào)文、接收CAN報(bào)文; 如果直接使用CAN硬件驅(qū)動(dòng),當(dāng)更換控制器時(shí),需要修改上層應(yīng)用程序,移植性差。在應(yīng)用層和硬件驅(qū)動(dòng)層加入虛擬驅(qū)動(dòng)層,能夠屏蔽不同CAN控制器的差異。 一個(gè)CAN節(jié)點(diǎn)除了完成通信的功能,還包括一些特定的硬件功能電路,功能電路驅(qū)動(dòng)向下直接控制功能電路,向上為應(yīng)用層提供控制功能電路函數(shù)接口。特定功能包括信號采集、人機(jī)顯示等。
?
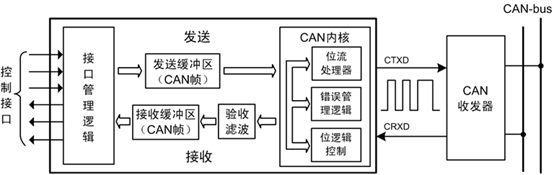
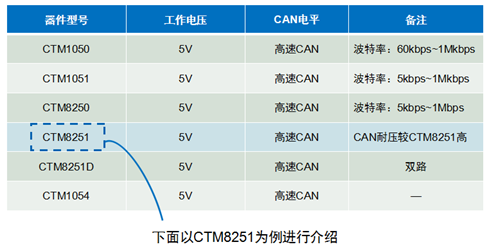
CAN收發(fā)器是實(shí)現(xiàn)CAN控制器邏輯電平與CAN總線上差分電平的互換。實(shí)現(xiàn)CAN收發(fā)器的方案有兩種,一是使用CAN收發(fā)IC(需要加電源隔離和電氣隔離),另一種是使用CAN隔離收發(fā)模塊。推薦使用第二種。 CAN控制器是CAN的核心元件,它實(shí)現(xiàn)了CAN協(xié)議中數(shù)據(jù)鏈路層的全部功能,能夠自動(dòng)完成CAN協(xié)議的解析。CAN控制器一般有兩種,一種是控制器IC(SJA1000),另一種是集成CAN控制器的MCU(LPC11C00)。 MCU負(fù)責(zé)實(shí)現(xiàn)對功能電路和CAN控制器的控制:在節(jié)點(diǎn)啟動(dòng)時(shí),初始化CAN控制器參數(shù);通過CAN控制器讀取和發(fā)送CAN幀;在CAN控制器發(fā)生中斷時(shí),處理CAN控制器的中斷異常;根據(jù)接收到的數(shù)據(jù)輸出控制信號;
?
接口管理邏輯:解釋MCU指令,尋址CAN控制器中的各功能模塊的寄存器單元,向主控制器提供中斷信息和狀態(tài)信息。 發(fā)送緩沖區(qū)和接收緩沖區(qū)能夠存儲(chǔ)CAN總線網(wǎng)絡(luò)上的完整信息。 驗(yàn)收濾波是將存儲(chǔ)的驗(yàn)證碼與CAN報(bào)文識別碼進(jìn)行比較,跟驗(yàn)證碼匹配的CAN幀才會(huì)存儲(chǔ)到接收緩沖區(qū)。 CAN內(nèi)核實(shí)現(xiàn)了數(shù)據(jù)鏈路的全部協(xié)議。
CAN協(xié)議應(yīng)用層概述
CAN總線只提供可靠的傳輸服務(wù),所以節(jié)點(diǎn)接收報(bào)文時(shí),要通過應(yīng)用層協(xié)議來判斷是誰發(fā)來的數(shù)據(jù)、數(shù)據(jù)代表了什么含義。常見的CAN應(yīng)用層協(xié)議有:CANOpen、DeviceNet、J1939、iCAN等。 CAN應(yīng)用層協(xié)議驅(qū)動(dòng)是運(yùn)行在主控制器(如P89V51)上的程序,它按照應(yīng)用層協(xié)議來對CAN報(bào)文進(jìn)行定義、完成CAN報(bào)文的解析與拼裝。例如,我們將幀ID用來表示節(jié)點(diǎn)地址,當(dāng)接收到的幀ID與自身節(jié)點(diǎn)ID不通過時(shí),就直接丟棄,否則交給上層處理;發(fā)送時(shí),將幀ID設(shè)置為接收節(jié)點(diǎn)的地址。
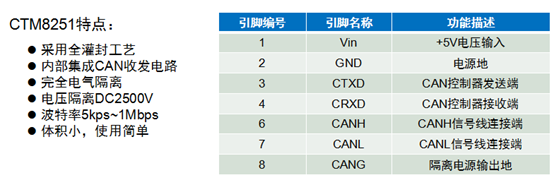
CAN收發(fā)器
SJA1000的輸出模式有很多,使用最多的是正常輸出模式,輸入模式通常不選擇比較器模式,可以增大通信距離,并且減少休眠下的電流。
?
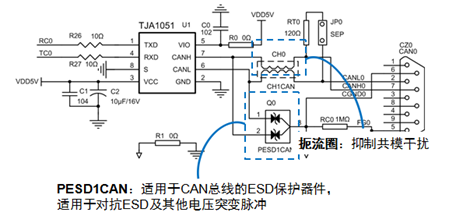
收發(fā)器按照通信速度分為高速CAN收發(fā)器和容錯(cuò)CAN收發(fā)器。 同一網(wǎng)絡(luò)中要使用相同的CAN收發(fā)器。 CAN連接線上會(huì)有很多干擾信號,需要在硬件上添加濾波器和抗干擾電路
?
也可以使用CAN隔離收發(fā)器(集成濾波器和抗干擾電路)。
?
?
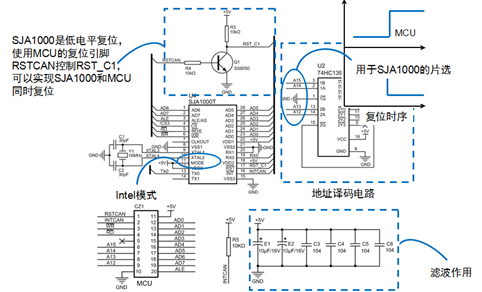
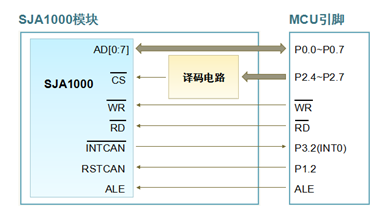
CAN控制器與MCU的連接方式
?
SJA1000可被視為外擴(kuò)RAM,地址寬度8位,最多支持256個(gè)寄存器
?
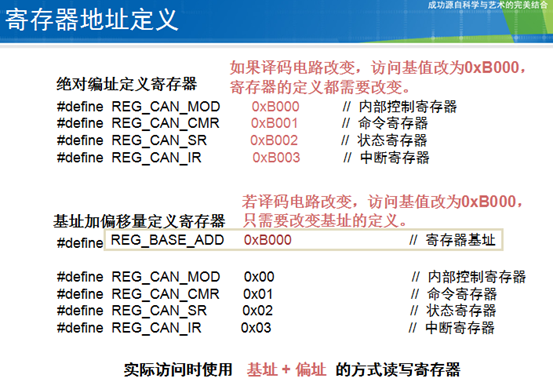
- ?
#define REG_BASE_ADDR 0xA000 // 寄存器基址unsigned char *SJA_CS_Point = (unsigned char *) REG_BASE_ADDR ;// 寫SJA1000寄存器void WriteSJAReg(unsigned char RegAddr, unsigned char Value) {*(SJA_CS_Point + RegAddr) = Value;return;}// 讀SJA1000寄存器unsigned char ReadSJAReg(unsigned char RegAddr) { return (*(SJA_CS_Point + RegAddr));}
? ?
? ?
?將緩存區(qū)的數(shù)據(jù)連續(xù)寫入寄存器 ?
- ?
- ?
- ?
- ?
- ?
- ?
…… for (i=0;i;i++)>{ WriteSJAReg(RegAdr+i,ValueBuf[i]); }…… ?將連續(xù)多個(gè)寄存器連續(xù)讀入緩存區(qū) ?
- ?
- ?
- ?
- ?
- ?
……for (i=0;i;i++)> ReadSJAReg(RegAdr+i,ValueBuf[i]); }……?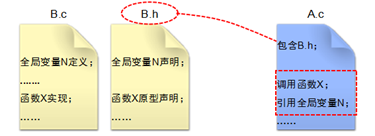 ?
?頭文件包含方案:
- 每個(gè)程序包含用到的頭文件
- 每個(gè)程序包含一個(gè)公用頭文件,公用頭文件包含所有其他頭文件
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
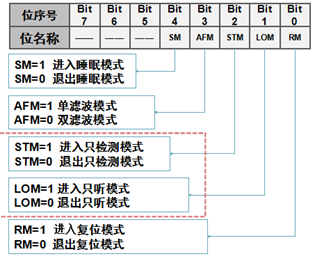
#ifndef __CONFIG_H__ // 防止頭文件被重復(fù)包含 #define __CONFIG_H__ #include <8051.h> // 包含80C51寄存器定義頭文件 #include "SJA1000REG.h" // 包含SJA1000寄存器定義頭文件 // 定義取字節(jié)運(yùn)算 #define LOW_BYTE(x) (unsigned char)(x) #define HIGH_BYTE(x) (unsigned char)((unsigned int)(x) >> 8) // 定義振蕩器時(shí)鐘和處理器時(shí)鐘頻率(用戶可以根據(jù)實(shí)際情況作出調(diào)整) #define OSCCLK 11059200UL // 宏定義MCU的時(shí)鐘頻率 #define CPUCLK (OSCCLK / 12) #endif // __CONFIG_H__ ?SJA1000上電后處于復(fù)位狀態(tài),必須初始化后才能工作。(1)置位模式寄存器Bit0位進(jìn)入復(fù)位模式;(2)設(shè)置時(shí)鐘分頻寄存器選擇時(shí)鐘頻率、CAN模式;(3)設(shè)置驗(yàn)收濾波,設(shè)定驗(yàn)證碼和屏蔽碼;(4)設(shè)置總線定時(shí)器寄存器0、1設(shè)定CAN波特率;(5)設(shè)置輸出模式;(6)清零模式寄存器Bit0位退出復(fù)位模式;??
模式寄存器
?
只檢測模式:SJA1000發(fā)送CAN幀時(shí)不檢查應(yīng)答位;只聽模式:此模式下SJA1000不會(huì)發(fā)送錯(cuò)誤幀,用于自動(dòng)檢測波特率;SJA1000以不同的波特率接收CAN幀,當(dāng)收到CAN幀時(shí),表明當(dāng)前波特率與總線波特率相同。
波特率設(shè)置
CAN總線無時(shí)鐘,使用異步串行傳輸;波特率是1秒發(fā)送的數(shù)據(jù)位;

?
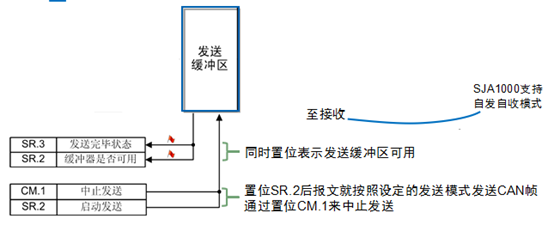
CAN幀發(fā)送:
發(fā)送CAN幀的步驟:1.檢測狀態(tài)寄存器,等待發(fā)送緩沖區(qū)可用;2.填充報(bào)文到發(fā)送緩沖區(qū);3.啟動(dòng)發(fā)送。
?
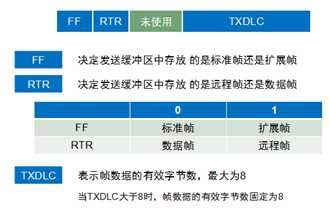
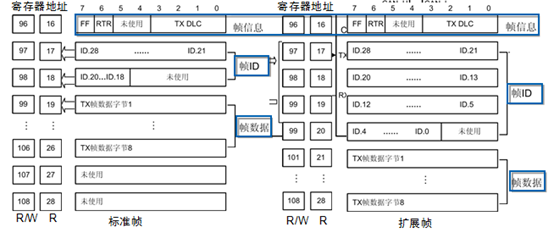
SJA1000具有一個(gè)12字節(jié)的緩沖區(qū),要發(fā)送的報(bào)文可以通過寄存器16-28寫入,也可通過寄存器96-108寫入或讀出
?
?
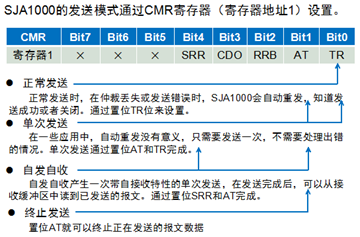
設(shè)置發(fā)送模式
?- ?
char SetSJASendCmd(unsigned char cmd) {unsigned char ret;switch (cmd) {default:case 0: ret = SetBitMask(REG_CAN_CMR, TR_BIT); //正常發(fā)送break;case 1: ret = SetBitMask(REG_CAN_CMR, TR_BIT|AT_BIT); //單次發(fā)送break;case 2: ret = SetBitMask(REG_CAN_CMR, TR_BIT|SRR_BIT);//自收自發(fā)break;case 0xff: ret = SetBitMask(REG_CAN_CMR, AT_BIT);//終止發(fā)送break; }return ret;}
??發(fā)送函數(shù) ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
- ?
unsigned char SJA_CAN_Filter[8] = { // 定義驗(yàn)收濾波器的參數(shù),接收所有幀 0x00, 0x00, 0x00, 0x00, // ACR0~ACR3 0xff, 0xff, 0xff, 0xff // AMR0~AMR3 }; unsigned char STD_SEND_BUFFER[11] = { // CAN 發(fā)送報(bào)文緩沖區(qū) 0x08, // 幀信息,標(biāo)準(zhǔn)數(shù)據(jù)幀,數(shù)據(jù)長度 = 8 0xEA, 0x60, // 幀ID = 0x753 0x55, 0x55, 0x55, 0x55, 0xaa, 0xaa, 0xaa, 0xaa // 幀數(shù)據(jù) }; void main(void) // 主函數(shù),程序入口{ timerInit();// 初始化 D1 = 0; SJA1000_RST = 1; // 硬件復(fù)位SJA1000 timerDelay(50); // 延時(shí)500ms SJA1000_RST = 0; SJA1000_Init(0x00, 0x14, SJA_CAN_Filter); // 初始化SJA1000,設(shè)置波特率為1Mbps // 無限循環(huán),main()函數(shù)不允許返回 for(;;) { SJASendData(STD_SEND_BUFFER, 0x0); timerDelay(100); // 延時(shí)1000ms } } ?為什么幀ID是0x753,這與CAN幀在緩沖區(qū)的存儲(chǔ)格式有關(guān)。
?
?
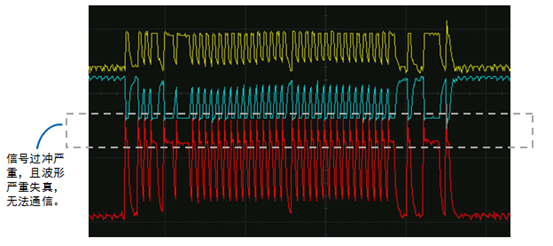
終端電阻非常重要,當(dāng)波特率較高而且沒加終端電阻時(shí),信號過沖非常嚴(yán)重。
?
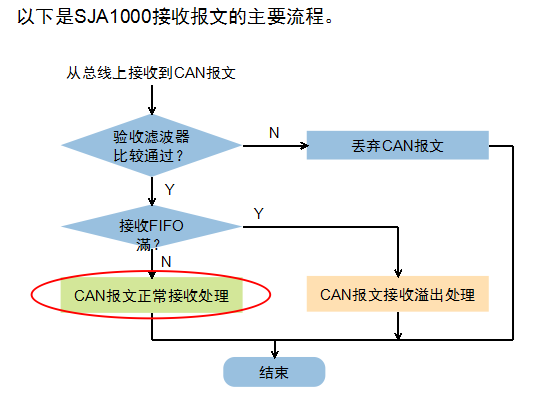
SJA1000有64個(gè)字節(jié)的接收緩沖區(qū)(FIFO),這可以降低對MCU的要求。MCU可以通過查詢或中斷的方式確定SJA1000接收到報(bào)文后讀取報(bào)文。
審核編輯:湯梓紅





















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論