CAN總線上傳輸的信息稱為報(bào)文,當(dāng)總線空閑時(shí)任何連接的單元都可以開始發(fā)送新的報(bào)文。
2022-09-26 14:15:52 12197
12197 CAN總線上傳輸的信息稱為報(bào)文,當(dāng)總線空閑時(shí)任何連接的單元都可以開始發(fā)送新的報(bào)文。
2022-09-28 15:20:401014 
比如ECU1接收ECU2發(fā)出的一幀0x100報(bào)文,協(xié)議層是不會(huì)區(qū)分是ECU1發(fā)的,還是非法接入OBD的CAN盒發(fā)的?如果ECU1接收到非ECU2發(fā)出的0x100報(bào)文豈不是很危險(xiǎn)?
2024-01-24 10:03:25567 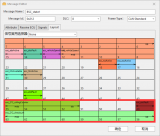
這意味著變送器通過CAN收發(fā)器改變總線電平,并將其信息傳輸到CAN總線。接收器通過監(jiān)測(cè)總線電平將總線上的信息讀取到自己的CAN收發(fā)器中。
2024-02-19 14:53:54606 
信號(hào)譬如視頻、雷達(dá)等等也開始使用以太網(wǎng)來進(jìn)行傳輸。隱隱有取代CAN總線成為汽車總線的趨勢(shì),然而事實(shí)真的是這樣嗎?
2018-02-26 09:32:3021367 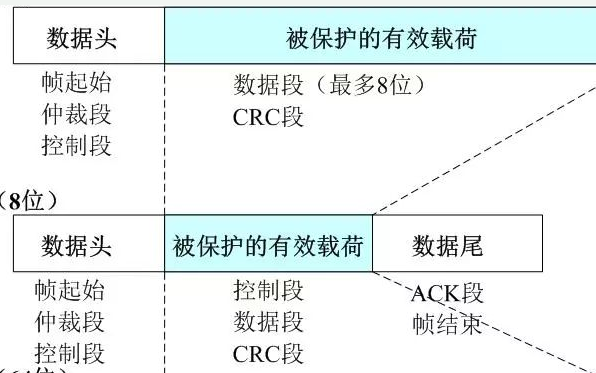
層完成數(shù)據(jù)打包/解包、幀編碼、媒體訪問管理、錯(cuò)誤檢測(cè)、錯(cuò)誤信令、應(yīng)答、串并轉(zhuǎn)換等功能。這些功能都是圍繞信息幀傳送過程展開的。3 CAN總線的報(bào)文傳輸和結(jié)構(gòu)報(bào)文類型 在CAN2.0B的版本協(xié)議中有兩種
2014-04-27 15:16:02
到車輛的運(yùn)行情況,做出及時(shí)的措施。廣州致遠(yuǎn)電子股份有限公司繼研發(fā)成功 CANREC—— 8 通道 CAN 總線報(bào)文波形記錄分析儀之后。又推出了一系列帶無線數(shù)據(jù)傳輸的 CAN 總線記錄儀,不但可以離線 CAN 記錄儀進(jìn)行報(bào)文記錄,還可以進(jìn)行 GPRS、3G等遠(yuǎn)程傳輸。如圖 1 所示。
2022-10-17 07:33:01
CAN報(bào)文接收時(shí)MASK的值為0時(shí) 不管ID是多少 都接收MASK為1時(shí)看發(fā)送節(jié)點(diǎn)ID與驗(yàn)收碼是否一致同一位上同是0或者同是1則接收,否則不接收對(duì)嗎????
2013-01-02 20:04:53
在了解 CAN 總線協(xié)議以前,需要介紹有關(guān)協(xié)議中的基本概念。1.報(bào)文(Messages)在 CAN 總線傳輸的數(shù)據(jù)具有固定的格式和有限的長(zhǎng)度,稱為報(bào)文。2.發(fā)送器(Transmitter)和接收器
2018-12-14 14:37:44
)子層完成數(shù)據(jù)打包/解包、幀編碼、媒體訪問管理、錯(cuò)誤檢測(cè)、錯(cuò)誤信令、應(yīng)答、串并轉(zhuǎn)換等功能。這些功能都是圍繞信息幀傳送過程展開的。3 CAN總線的報(bào)文傳輸和結(jié)構(gòu)報(bào)文類型 在CAN2.0B的版本協(xié)議中有
2014-04-18 16:36:30
。5.CAN總線智能節(jié)點(diǎn)的軟件設(shè)計(jì)包括:CAN節(jié)點(diǎn)初始化、報(bào)文發(fā)送和報(bào)文接收。6.CAN總線上用顯性和隱性兩個(gè).
2022-01-11 06:50:05
文字?jǐn)⑹鲞@部分內(nèi)容的,不僅說得不系統(tǒng)完整,而且遠(yuǎn)沒有貼圖說明來的具體直觀。不過還好,搜到了一份E文版的CAN總線資料,再把這個(gè)資料詳細(xì)看了下,再做了整理,還是用圖來說明CAN傳輸的報(bào)文格式比較容易理解
2017-10-19 11:12:46
CAN2.0A給出了CAN報(bào)文的標(biāo)準(zhǔn)格式,CAN2.0B給出了標(biāo)準(zhǔn)格式和擴(kuò)展格式兩種。CAN總線最高傳輸速率可達(dá)1Mbps(通信距離最長(zhǎng)40m),如果降低傳輸速率,其直接通信的最遠(yuǎn)距離可達(dá)10km(速率
2021-05-13 06:00:00
只有2根線與外部相連,并且內(nèi)部集成了錯(cuò)誤探測(cè)和管理模塊。5、傳輸距離和速率CAN總線特點(diǎn):(1) 數(shù)據(jù)通信沒有主從之分,任意一個(gè)節(jié)點(diǎn)可以向任何其他(一個(gè)或多個(gè))節(jié)點(diǎn)發(fā)起數(shù)據(jù)通信,靠各個(gè)節(jié)點(diǎn)信息優(yōu)先級(jí)
2015-11-05 17:17:31
IICSPICAN485USB工業(yè)以太網(wǎng)EtherCATEtherCAT傳輸性能EtherCAT應(yīng)用層協(xié)議層CoE協(xié)議現(xiàn)場(chǎng)總線最近的實(shí)驗(yàn)需要較高的運(yùn)動(dòng)控制速率。市場(chǎng)上大部分的驅(qū)動(dòng)板目前只支持CAN通信。畢竟CAN通信配置簡(jiǎn)單
2021-08-06 07:44:19
和功能。今天博主將和大家共同學(xué)習(xí)CAN總線標(biāo)識(shí)符過濾器的使用(非常重要!)請(qǐng)認(rèn)真讀這段話(來自STM32中文參考手冊(cè)):在CAN協(xié)議里,報(bào)文的標(biāo)識(shí)符不代表節(jié)點(diǎn)的地址,而是跟報(bào)文的內(nèi)容相關(guān)的。
2021-08-19 06:25:51
輸出高電平,總線才能呈現(xiàn)為高電平(稱為“隱性”)。可見,只要有一個(gè)設(shè)備電平顯性,那么他就可以覆蓋其他所有設(shè)備的電平隱性。CAN控制器在發(fā)送報(bào)文的同時(shí)會(huì)監(jiān)聽總線狀態(tài)與自己發(fā)送的電平是否一致,如果不一致發(fā)生
2022-01-19 06:57:59
CAN總線的發(fā)送基本概念報(bào)文的作用報(bào)文的格式CAN.C代碼//CAN發(fā)送一組數(shù)據(jù)(固定格式:ID為0X12,標(biāo)準(zhǔn)幀,數(shù)據(jù)幀)//msg:數(shù)據(jù)指針,最大為8個(gè)字節(jié),len:數(shù)據(jù)長(zhǎng)度(最大為8
2021-08-19 08:17:55
控制進(jìn)入CAN總線,并且每條消息都標(biāo)記了優(yōu)先權(quán)。另外CAN標(biāo)準(zhǔn)還定義了一系列的錯(cuò)誤處理機(jī)制。CAN報(bào)文的四種消息類型:? 數(shù)據(jù)幀:數(shù)據(jù)幀將數(shù)據(jù)從發(fā)送器傳輸到接收器。? 遠(yuǎn)程幀:總線單元發(fā)出遠(yuǎn)程幀,請(qǐng)求
2018-09-21 20:32:41
屬于現(xiàn)場(chǎng)總線的范疇,它是一種有效支持分布式控制或?qū)崟r(shí)控制的串行通信網(wǎng)絡(luò)。在這個(gè)網(wǎng)絡(luò)中的各種硬件設(shè)備之間不可避免的需要實(shí)現(xiàn)數(shù)據(jù)傳輸,以實(shí)現(xiàn)產(chǎn)品的功用。適應(yīng)技術(shù)具體要求,CAN總線透明傳輸通訊模塊誕生
2011-09-24 11:57:56
必須是相同的。? 傳輸層描述了 CAN 總線協(xié)議的內(nèi)核,它負(fù)責(zé)位時(shí)序(bit timing)、同步、仲裁、應(yīng)答、錯(cuò)誤探測(cè)等。? 對(duì)象層負(fù)責(zé)報(bào)文的過濾、狀態(tài)和控制。? 應(yīng)用層完成用戶指定的數(shù)據(jù)傳輸任務(wù)。CAN 總線的物理層為數(shù)據(jù)通信提供了物理連接,而實(shí)際的數(shù)據(jù)通信在其他 3 層中完成。
2018-12-14 14:17:02
,PGN61444 包含了SPN190 發(fā)動(dòng)機(jī)轉(zhuǎn)速和SPN513 發(fā)動(dòng)機(jī)扭矩等參數(shù)。多幀報(bào)文:CAN2.0B 規(guī)范定義只能使用單幀報(bào)文傳輸,J1939 協(xié)議除單幀報(bào)文傳輸外,還使用對(duì)話式、廣播式多幀報(bào)文傳輸
2019-04-08 09:42:13
本帖最后由 于圭 于 2015-1-23 16:33 編輯
我用labview通過CAN總線發(fā)數(shù)據(jù),單片機(jī)發(fā)過來的數(shù)據(jù)有3個(gè)不同的報(bào)文ID,我要怎么正確的把這3個(gè)報(bào)文里面的數(shù)據(jù)讀取出來,求大神指教!!
2014-12-31 14:46:41
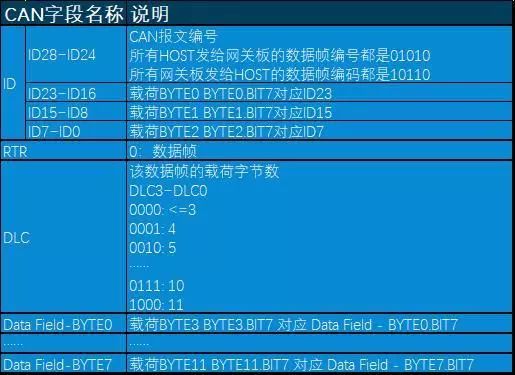
協(xié)議中CAN報(bào)文種類報(bào)文傳輸過程中有:數(shù)據(jù)幀、遠(yuǎn)程幀、錯(cuò)誤幀、過載幀和幀間隔。3. CAN報(bào)文的組成通常接收到的CAN報(bào)文由很多部分(圖1)組成,解析報(bào)文時(shí)用到的主要是幀ID和數(shù)據(jù)兩部分。3.1 幀ID的組成接收到的十六進(jìn)制的ID實(shí)際上是由 29 位標(biāo)識(shí)符轉(zhuǎn)換而來,目前大多數(shù)的通信協(xié)議中都直接給出
2021-09-14 09:23:24
問大家一個(gè)問題哈,對(duì)于一個(gè)主板,多個(gè)從板的系統(tǒng),如何實(shí)現(xiàn)CAN報(bào)文的濾波,以實(shí)現(xiàn)對(duì)應(yīng)從板接收對(duì)應(yīng)的報(bào)文。
2017-02-08 09:27:41
我用labview通過CAN總線發(fā)數(shù)據(jù),控制器發(fā)過來的數(shù)據(jù)有3個(gè)不同的報(bào)文ID,我要怎么正確的把這3個(gè)報(bào)文里面的數(shù)據(jù)讀取出來,求大神指教!!多謝多謝
2021-07-23 11:02:50
CAN總線中報(bào)文數(shù)據(jù)讀取方法motorola編碼格式的CAN報(bào)文解析需要知道DBC的哪些信息排序方式讀取方式發(fā)送方式注motorola編碼格式的CAN報(bào)文解析知道CAN報(bào)文的DBC,即可按以下
2022-01-12 07:28:16
CAN 總線的報(bào)文傳輸是通過 4 種不同類型的幀(Frame)來表示和控制的:? 數(shù)據(jù)幀(Data Frame) 用來在數(shù)據(jù)傳輸過程中攜帶數(shù)據(jù)。? 遠(yuǎn)程幀(Remoter Frame) 接收器發(fā)送
2018-12-17 10:59:18
CAN卡又叫做CAN總線分析儀,同星TOSUN智能科技又對(duì)它進(jìn)行細(xì)致分類,USBCAN卡,CAN總線網(wǎng)關(guān),CAN總線轉(zhuǎn)換器等等。主要功能就是起著通信協(xié)議轉(zhuǎn)換的作用,使設(shè)備之間傳輸無障礙,順利收發(fā)
2022-08-10 11:33:54
一、MODBUS簡(jiǎn)介①M(fèi)odbus協(xié)議是一種請(qǐng)求/應(yīng)答的串行通信協(xié)議,是一種工業(yè)現(xiàn)場(chǎng)總線協(xié)議標(biāo)準(zhǔn)。是一項(xiàng)應(yīng)用層報(bào)文傳輸協(xié)議,用于在通過不同類型的總線或網(wǎng)絡(luò)連接的設(shè)備之間的客戶機(jī)/服務(wù)器通信。②Modbus協(xié)議是一項(xiàng)應(yīng)用層報(bào)文傳輸協(xié)議,包括ASCII、RTU、TCP三種報(bào)文類型。③標(biāo)準(zhǔn)的Modbus...
2021-08-03 06:50:22
用來傳輸數(shù)據(jù)通信的,對(duì)其工作原理一竅不通,還是從基礎(chǔ)開始看書看資料,先了解它的基本原理吧。原來can總線有以下特點(diǎn):主要特點(diǎn)支持CAN協(xié)議2.0A和2.0B主動(dòng)模式波特率最高可達(dá)1兆位/秒支持時(shí)間觸發(fā)
2015-02-04 14:07:45
TC387模塊CAN0的節(jié)點(diǎn)2作為CANA使用,CAN1的節(jié)點(diǎn)0作為CANB使用,配置基本相同。但CANB的通信正常,而在TJA1145正常情形下,CANA既收不到報(bào)文,也發(fā)不出報(bào)文,查看CAN
2024-02-19 06:43:51
rs485與can總線的區(qū)別,CAN總線特點(diǎn):1、國際標(biāo)準(zhǔn)的工業(yè)級(jí)現(xiàn)場(chǎng)總線,傳輸可靠,實(shí)時(shí)性高;2、傳輸距離遠(yuǎn)(最遠(yuǎn)10Km),傳輸速率快(最高1MHz bps);3、單條總線最多可接110個(gè)節(jié)點(diǎn)
2021-07-19 06:07:04
110個(gè);報(bào)文標(biāo)識(shí)符可達(dá)2032種(CAN2.0A),而擴(kuò)展標(biāo)準(zhǔn)(CAN2.0B)的報(bào)文標(biāo)識(shí)符幾乎不受限制。5.CAN總線通信系統(tǒng)拓?fù)浣Y(jié)構(gòu)CAN在物理結(jié)構(gòu)上屬于總線式通信網(wǎng)絡(luò)。系統(tǒng)的組成如下圖:該系
2016-11-06 17:00:51
泊車等基本或高階的功能,涉及到 ADAS 域控制器與感知傳感器、底盤、動(dòng)力等執(zhí)行控制器的控制交互。2.2 方案設(shè)計(jì)對(duì)于 2.1 章節(jié)所描述的功能需求,在以往項(xiàng)目設(shè)計(jì)時(shí)多采用 CAN 總線進(jìn)行傳輸相關(guān)報(bào)文
2023-02-14 14:22:23
時(shí)才能繼續(xù)啟動(dòng)報(bào)文發(fā)送。因此,CAN節(jié)點(diǎn)每發(fā)送一位數(shù)據(jù)都要監(jiān)聽總線上的數(shù)據(jù)是否與所發(fā)送的一致。在不考慮信號(hào)在光纖中傳輸時(shí)的衰減及CAN節(jié)點(diǎn)自身限制的前提下,為了保證CAN總線通信的正常進(jìn)行,在CAN
2018-12-04 10:41:09
在 5kbit/s 以下)。? CAN 總線上的節(jié)點(diǎn)信息分成不同的優(yōu)先級(jí),可以滿足不同級(jí)別的實(shí)時(shí)要求,高優(yōu)先級(jí)的數(shù)據(jù)可以在 134μs 內(nèi)得到傳輸。? CAN 總線通過報(bào)文濾波即可實(shí)現(xiàn)點(diǎn)對(duì)點(diǎn)、一點(diǎn)
2018-12-13 14:26:31
結(jié)合起來。例如,在將出現(xiàn)頻度很高的報(bào)文從高速CAN總線傳輸到低速 CAN總線時(shí),將網(wǎng)關(guān)和FIFO功能結(jié)合起來,就有可能在不增加CPU負(fù)荷的前提下實(shí)現(xiàn)這種報(bào)文傳輸。圖2:利用網(wǎng)關(guān)功能自主傳送CAN報(bào)文,毋須
2018-12-07 10:09:17
,在標(biāo)準(zhǔn)格式中,短幀的字節(jié)數(shù)為8個(gè),因此傳輸時(shí)間短,受干擾的概率低,重新發(fā)數(shù)據(jù)幀的時(shí)間短,并且每幀信息都有CBC校驗(yàn)及其他檢錯(cuò)措施,這樣可以保證極低的數(shù)據(jù)出錯(cuò)率。CAN總線上的節(jié)點(diǎn)在錯(cuò)誤嚴(yán)重時(shí),可以自動(dòng)
2018-11-13 10:38:08
問題日益突出,總線故障潛在問題極其嚴(yán)重。那么,如何保證CAN總線穩(wěn)定,為何主機(jī)廠愈來愈重視CAN一致性測(cè)試?如何解決CAN總線測(cè)試問題呢?CAN一致性測(cè)試,就是要求整車CAN網(wǎng)絡(luò)中的節(jié)點(diǎn)都滿足CAN總線節(jié)點(diǎn)
2019-04-26 10:52:24
,如果總線負(fù)載過高,那么一個(gè)優(yōu)先級(jí)相對(duì)較低的節(jié)點(diǎn)需要發(fā)送報(bào)文時(shí),會(huì)出現(xiàn)頻繁的仲裁失敗而導(dǎo)致發(fā)送延遲。因此,為了保證低優(yōu)先級(jí)報(bào)文傳輸延遲在可接受的范圍內(nèi),總線負(fù)載率不應(yīng)超過30%。當(dāng)負(fù)載率大于40
2019-12-19 15:09:07
之間不會(huì)傳輸大數(shù)據(jù)塊,一幀CAN消息最多傳輸8字節(jié)用戶數(shù)據(jù),采用短數(shù)據(jù)包也可以使得系統(tǒng)獲得更好的穩(wěn)定性。CAN總線具有總線仲裁機(jī)制,可以組建多主系統(tǒng)。 2、CAN標(biāo)準(zhǔn)CAN是一個(gè)由國際化標(biāo)準(zhǔn)組織定義
2021-03-23 08:30:00
能不能在接收CAN報(bào)文的時(shí)候沒有過濾器?我想創(chuàng)建一個(gè)網(wǎng)關(guān)并將所有消息從一個(gè) CAN 總線傳輸到另一個(gè) CAN 總線。我是否只需要將 1000 條消息添加到我的允許消息列表中以確保所有消息都被接受?
2022-12-12 08:08:59
在VXI總線系統(tǒng)中,為了能夠獲得大量實(shí)時(shí)數(shù)據(jù),需要利用CAN總線快速可靠的傳輸數(shù)據(jù)的性能,設(shè)計(jì)一種混合VXI總線和CAN總線的系統(tǒng)。在這種混合系統(tǒng)中要實(shí)現(xiàn)CAN總線上各個(gè)節(jié)點(diǎn)采集
2009-07-06 16:27:58 13
13 本文針對(duì)煤礦安全監(jiān)控系統(tǒng)的特點(diǎn)以及目前傳輸系統(tǒng)存在的問題,提出了用CAN 總線構(gòu)建煤礦安全監(jiān)控系統(tǒng)傳輸網(wǎng)絡(luò)的思想,并實(shí)際完成了基于CAN 總線的煤礦安全監(jiān)控系統(tǒng)傳輸網(wǎng)絡(luò)的
2009-08-28 11:29:0115 簡(jiǎn)單介紹了CAN總線的來源、現(xiàn)狀及存在的問題;針對(duì)CAN總線傳輸距離存在的問題提出了兩個(gè)解決方案,并進(jìn)行了實(shí)驗(yàn)和比較,試驗(yàn)結(jié)果證明本文的方法提高了傳輸距離的可靠性。
2010-02-21 15:34:0218 簡(jiǎn)單介紹了CAN總線的來源、現(xiàn)狀及存在的問題;針對(duì)CAN總線傳輸距離存在的問題提出了兩個(gè)解決方案,并進(jìn)行了實(shí)驗(yàn)和比較,試驗(yàn)結(jié)果證明本文的方法提高了傳輸距離的可靠性。
2010-07-22 17:35:0142 目前PCI是處于主流的計(jì)算機(jī)總線。以往的CAN卡一般都是基于ISA總線的,由于ISA總線傳輸速率低,CAN卡必須增加中繼控制功能,才能夠適應(yīng)CAN的高速傳輸,導(dǎo)致造價(jià)高、體積大、傳輸速率
2012-06-01 10:57:432053 
控制器局域網(wǎng)總線(CAN,Controller Area Network)是一種用于實(shí)時(shí)應(yīng)用的串行通訊協(xié)議總線,它可以使用雙絞線來傳輸信號(hào),是世界上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。CAN協(xié)議由德國的Robert Bos
2012-09-10 09:22:53197509 
通過對(duì)分布式C4ISR系統(tǒng)通信報(bào)文傳輸標(biāo)準(zhǔn)仿真驗(yàn)證系統(tǒng)的功能、組成、仿真模型與仿真系統(tǒng)流程的研究,提出了分布式C4ISR系統(tǒng)通信報(bào)文傳輸標(biāo)準(zhǔn)仿真驗(yàn)證系統(tǒng)的設(shè)計(jì)方案。系統(tǒng)可用于對(duì)新提出的C4ISR系統(tǒng)通信報(bào)文傳輸標(biāo)準(zhǔn)進(jìn)行正確性驗(yàn)證與可行性分析,同時(shí)可為新標(biāo)準(zhǔn)實(shí)施后的實(shí)裝貫標(biāo)改造工作提供技術(shù)支撐。
2016-01-04 09:39:067 [第13講] CAN總線(124分鐘),由何強(qiáng)主講.本課主要講解:(1).典型CAN總線網(wǎng)絡(luò)系統(tǒng)結(jié)構(gòu)詳解;(2).CAN總線的報(bào)文傳輸和結(jié)構(gòu)講解;(3).CAN總線特點(diǎn)講解;(4).STM32中的CAN控制器;(5).CAN控制器的寄存器詳解;(6).CAN控制器的庫函數(shù)詳解.
2016-10-09 16:14:191644 CAN-bus總線是應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一,而很多非常熟練的CAN工程師,面對(duì)一條CAN報(bào)文到底有多少位的問題時(shí),卻不能非常準(zhǔn)確地回答。今天我們就從最基本的幀格式來解惑一條CAN報(bào)文的到底有多少位。
2017-06-06 16:36:2932775 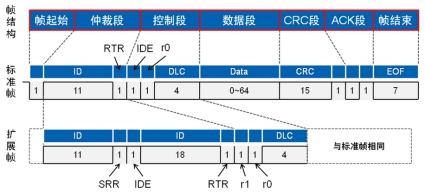
應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。在建立之初,CAN總線就定位于汽車內(nèi)部的現(xiàn)場(chǎng)總線,具有傳輸速度快、可靠性高、靈活性強(qiáng)等優(yōu)點(diǎn)。上世紀(jì)90年代CAN總線開始在汽車電子行業(yè)內(nèi)逐步推廣,目前已成為汽車電子行業(yè)首選的通信協(xié)議,并且在醫(yī)療設(shè)備、工業(yè)生產(chǎn)、樓宇設(shè)施、交通運(yùn)輸?shù)阮I(lǐng)域中取得了廣泛
2017-11-09 19:53:578438 
結(jié)構(gòu): 表1 CAN報(bào)文結(jié)構(gòu) 二、仲裁原理 CAN總線的仲裁是基于線與原理,如圖1所示。當(dāng)個(gè)收發(fā)器同時(shí)發(fā)
2017-11-12 10:52:428 當(dāng)CAN總線上的一個(gè)節(jié)點(diǎn)(站)發(fā)送數(shù)據(jù)時(shí),它以報(bào)文形式廣播給網(wǎng)絡(luò)中所有節(jié)點(diǎn)。對(duì)每個(gè)節(jié)點(diǎn)來說,無論數(shù)據(jù)是否是發(fā)給自己的,都對(duì)其進(jìn)行接收。每組報(bào)文開頭的n位字符為標(biāo)識(shí)符(擴(kuò)展幀格式為29位),定義了報(bào)文
2017-11-21 16:39:470 為了擴(kuò)展VME總線和CAN總線的應(yīng)用范圍,充分利用兩種總線的不同傳輸特點(diǎn),采用了模塊設(shè)計(jì)方法,提出一種基于FPGA和MCU的總線轉(zhuǎn)換方案。該方案給出了FPGA與上位VME總線部分的VME總線接口
2018-07-17 10:11:003239 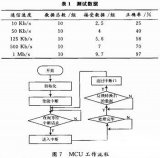
CAN總線原理 CAN總線使用串行數(shù)據(jù)傳輸方式,可以1Mb/s的速率在40m的雙絞線上運(yùn)行,也可以使用光纜連接,而且在這種總線上總線協(xié)議支持多主控制器。CAN與I2C總線的許多細(xì)節(jié)很類似,但也有一些
2017-12-07 10:25:5426 基于保證CAN總線網(wǎng)絡(luò)傳輸數(shù)據(jù)時(shí)可靠性的目的,采用了從包內(nèi)數(shù)據(jù)的可靠性、數(shù)據(jù)包的可靠性傳輸兩方面進(jìn)行驗(yàn)證的方法,通過多次對(duì)比使用文章設(shè)計(jì)的算法、不使用文章設(shè)計(jì)的算法時(shí)CAN總線網(wǎng)絡(luò)傳輸數(shù)據(jù)的準(zhǔn)確率
2017-12-21 16:19:060 用來實(shí)現(xiàn)CAN總線協(xié)議。本文主要對(duì)CAN總線通信報(bào)文驗(yàn)收濾波、位定時(shí)與同步做了詳細(xì)介紹,具體的跟隨小編一起來了解一下。
2018-05-07 16:16:129726 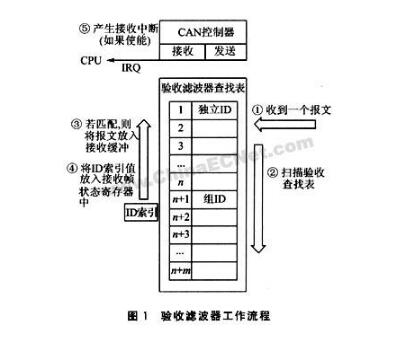
使用CANScope測(cè)量CAN總線信號(hào),在干擾很嚴(yán)重的情況下會(huì)出現(xiàn)CAN總線波形解碼與CAN報(bào)文解碼不一致的情況,具體表現(xiàn)為某些正確報(bào)文對(duì)應(yīng)的波形解碼卻是錯(cuò)誤的,或者收到的錯(cuò)誤報(bào)文對(duì)應(yīng)的波形解碼卻是正確的,如圖1中,幀ID為0x721的正確報(bào)文對(duì)應(yīng)的波形解碼卻為CRC錯(cuò)誤。
2019-12-06 07:57:004399 
CAN總線的通信距離最遠(yuǎn)可達(dá)10km,通信速率5Kbps以下。通信速率最高可達(dá)1Mbps,但是此時(shí)通信距離在40m以下。傳輸距離和速率成反比,還有線材要求也比較高。
2018-11-27 17:00:4733870 汽車CAN總線關(guān)閉故障發(fā)生時(shí),應(yīng)分析物理層包括CAN線路、CAN控制器及收發(fā)器、CAN信號(hào)干擾等外在因素,同時(shí)分析CAN寄存器及軟件處理,重新初始化CAN驅(qū)動(dòng)和恢復(fù)正常后,定時(shí)嘗試往外發(fā)送報(bào)文
2018-11-27 17:00:4938317 CAN總線通訊是我們每天都會(huì)使用的工業(yè)通訊總線,工程師更多的是關(guān)注報(bào)文是否能夠正常接收,解析結(jié)果是否正確。卻忽略了CAN總線的報(bào)文是怎么產(chǎn)生以及收發(fā)的,所以遇到通訊異常的問題時(shí)就會(huì)無從下手。那么這篇文章將會(huì)帶您快速了解報(bào)文的傳輸原理。
2019-04-25 14:50:5419046 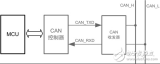
報(bào)文處理部分通過CAN收發(fā)器將總線上的CANH和CANL差分信號(hào)轉(zhuǎn)成單端的數(shù)字信號(hào)RXD,再使用專用的CAN控制器接收RXD信號(hào)并進(jìn)行CAN協(xié)議解碼,最后將解碼后的報(bào)文進(jìn)行接收存儲(chǔ);波形處理部分通過
2019-11-11 09:55:072678 
CAN協(xié)議教程 介紹:CAN總線 CAN總線是廣播類型的總線。這意味著所有節(jié)點(diǎn)都可以偵聽到所有傳輸的報(bào)文。無法將報(bào)文單獨(dú)發(fā)送給指定節(jié)點(diǎn);所有節(jié)點(diǎn)都將始終捕獲所有報(bào)文。但是,CAN硬件能夠提供本地過濾
2020-04-03 15:32:2213499 為獲得安全的數(shù)據(jù)發(fā)送,CAN總線采取錯(cuò)誤檢測(cè)和處理的措施,在報(bào)文傳輸過程中設(shè)有位錯(cuò)誤、填充錯(cuò)誤、CRC錯(cuò)誤、格式錯(cuò)誤和應(yīng)答錯(cuò)誤5種錯(cuò)誤類型,對(duì)于故障的界定有“錯(cuò)誤激活”、“錯(cuò)誤認(rèn)可”和“總線關(guān)閉”3種狀態(tài)。
2020-04-04 10:44:00969 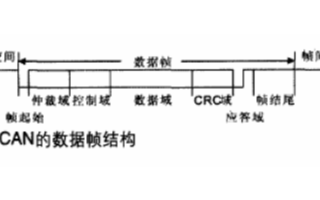
CAN總線的物理層是將ECU(Electronic Control Unit-電子控制單元,又稱“行車電腦”、“車載電腦”等)連接至總線的驅(qū)動(dòng)電路。ECU的總數(shù)將受限于總線上的電氣負(fù)荷。物理層定義
2020-08-14 11:29:137853 數(shù)據(jù)幀由7個(gè)不同的位場(chǎng)組成:幀起始、仲裁場(chǎng)、控制場(chǎng)、數(shù)據(jù)場(chǎng)、CRC場(chǎng)、應(yīng)答場(chǎng)、幀結(jié)束。其中,數(shù)據(jù)場(chǎng)的長(zhǎng)度為0~8個(gè)字節(jié)。標(biāo)識(shí)符位于仲裁場(chǎng)中,報(bào)文接收節(jié)點(diǎn)通過標(biāo)識(shí)符進(jìn)行報(bào)文濾波。
2020-11-02 10:46:4910656 都用CAN總線的話,那整車的總線架構(gòu)成本將會(huì)變得很高!在一些比如車身電子配件的地方(如車窗、后視鏡、大燈、車鎖等),我們不需要報(bào)文像CAN總線上傳輸的那樣高速!各大廠商一拍腦門就研究了這個(gè)LIN總線! 本文關(guān)注點(diǎn):有了CAN為什么還會(huì)有LIN,CAN和LIN的區(qū)
2020-12-06 09:37:007998 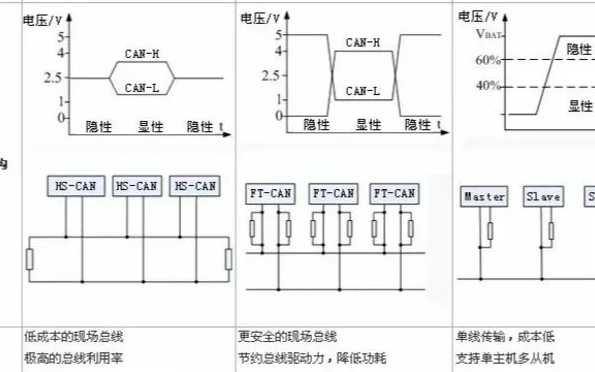
CAN總線的報(bào)文是怎么產(chǎn)生以及收發(fā)的,遇到通訊異常的問題時(shí)從什么角度分析?這篇文章將會(huì)帶您快速了解報(bào)文的傳輸原理。
2020-12-26 02:46:471412 在分析CAN總線雙絞線和光纖傳輸特點(diǎn)的基礎(chǔ)上,提出一種基于光纖收發(fā)一體模塊及CAN總線控制器SJAl000的光纖傳輸接口設(shè)計(jì)方案;詳細(xì)介紹光纖收發(fā)器的選取及傳輸接口的實(shí)現(xiàn);根據(jù)光纖收發(fā)一體模塊
2021-04-20 10:24:3733 CAN是一種用于實(shí)時(shí)應(yīng)用的串行通訊協(xié)議總線,CAN能夠使用雙絞線來傳輸信號(hào),是國際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。 can總線工作原理 CAN總線的傳輸方式是串行數(shù)據(jù)傳輸,能夠在1Mb/s的速率40m
2021-08-07 17:07:4333792 ),是一種用于實(shí)時(shí)應(yīng)用的串行通訊協(xié)議總線,它可以使用雙絞線來傳輸信號(hào),是世界上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。CAN協(xié)議用于汽車中各種不同元件之間的通信,用來取代昂貴而笨重的配電線束。CAN協(xié)議的使用廣泛這一特點(diǎn)使其很快延伸到自動(dòng)化控制以及工業(yè)領(lǐng)域中。 CAN協(xié)議的特性包括完
2022-01-15 17:04:485782 CAN總線開發(fā)工程師經(jīng)常會(huì)遇到總線在實(shí)驗(yàn)室中測(cè)試均能正常通過各項(xiàng)測(cè)試標(biāo)準(zhǔn),但是到現(xiàn)場(chǎng)卻出現(xiàn)了各種問題,如何解決各種現(xiàn)場(chǎng)異常工況呢?本文將從干擾定位開始為大家逐步分析。
2022-05-05 14:19:072653 CAN總線上傳輸的信息稱為報(bào)文,當(dāng)總線空閑時(shí)任何連接的單元都可以開始發(fā)送新的報(bào)文。
2022-10-10 14:58:296936 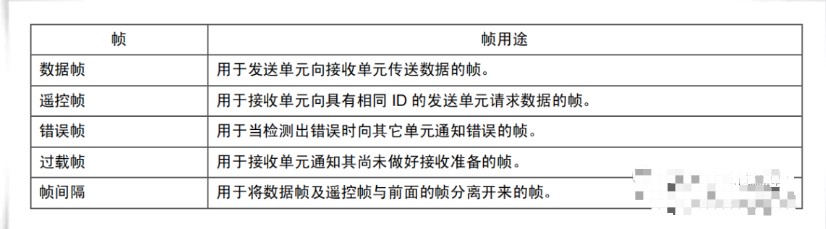
電子發(fā)燒友網(wǎng)站提供《CAN總線報(bào)文記錄產(chǎn)品簡(jiǎn)介.pdf》資料免費(fèi)下載
2022-10-14 14:50:311 CAN總線上傳輸的信息稱為報(bào)文,當(dāng)總線空閑時(shí)任何連接的單元都可以開始發(fā)送新的報(bào)文。
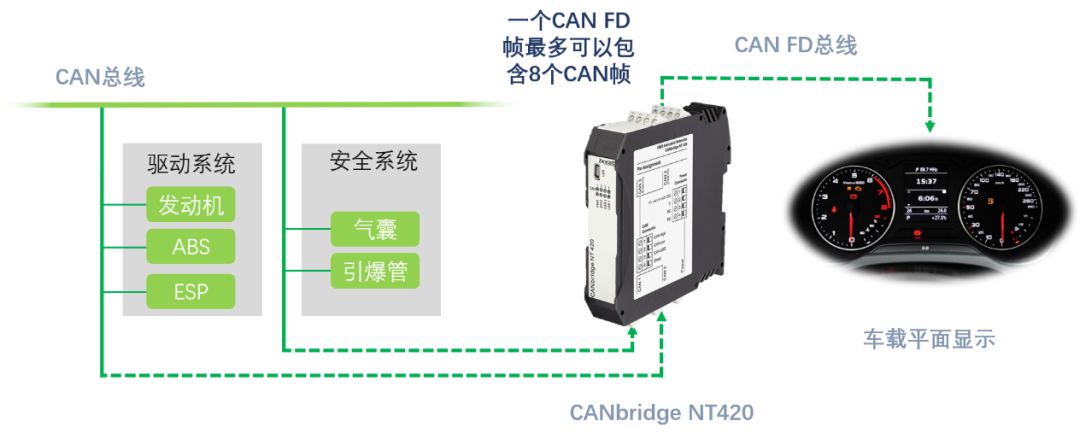
2022-10-17 15:09:493134 每個(gè)CAN報(bào)文只有8字節(jié),當(dāng)節(jié)點(diǎn)需要發(fā)送較大的數(shù)據(jù)報(bào)文時(shí)很容易受限,所以要傳輸大于8字節(jié)數(shù)據(jù)時(shí),就要進(jìn)行分包傳輸。
2022-10-25 11:18:172800 在詳解CAN總線:CAN總線報(bào)文格式—數(shù)據(jù)幀文章中,講解到仲裁段。仲裁段用于寫明需要發(fā)送到目的CAN節(jié)點(diǎn)的地址、確定發(fā)送的幀類型(當(dāng)前發(fā)送的是數(shù)據(jù)幀還是遙控幀),并確定發(fā)送的幀格式是標(biāo)準(zhǔn)幀還是擴(kuò)展幀。
2022-10-25 14:00:181632 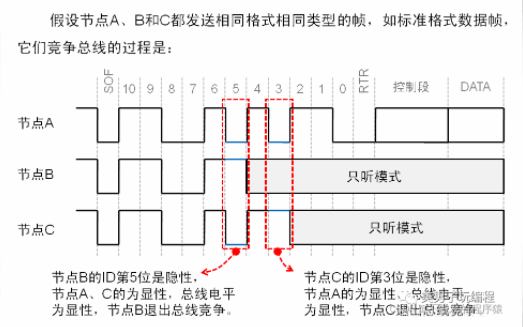
在CAN總線通信的應(yīng)用領(lǐng)域中,很多客戶需要將CANID 放在CAN報(bào)文中,這樣更方便接入不同的設(shè)備,有利于用戶通過模塊更方便的組建自己的網(wǎng)絡(luò),使用自定的應(yīng)用協(xié)議。但是要實(shí)現(xiàn)這樣的應(yīng)用,用戶往往需要
2023-05-12 10:40:32539 
CAN總線是一種常用的總線,對(duì)于剛開始接觸CAN總線的,面對(duì)著各式各樣的資料,可能不知道從何看起,今天科普一下CAN總線的基礎(chǔ)知識(shí)。
2023-06-19 17:20:141160 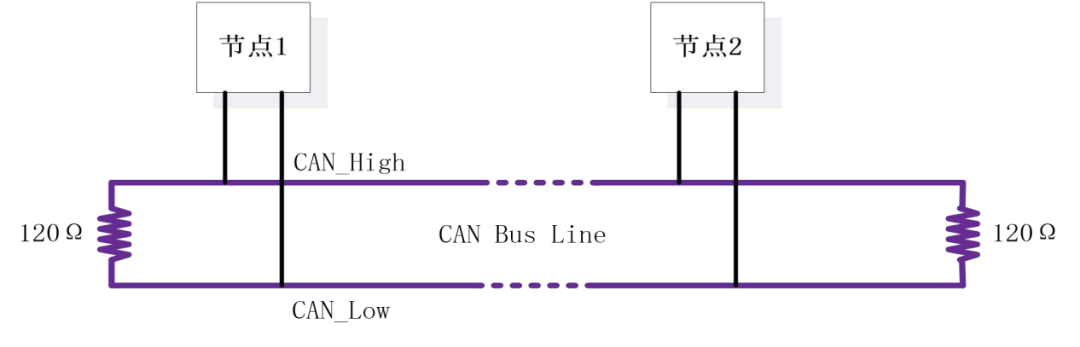
,在不改變硬件結(jié)構(gòu)情況下,如何實(shí)現(xiàn)串口、以太網(wǎng)與CAN之間的相互通訊;第二,如何解決在高波特率下,CAN系統(tǒng)最大傳輸距離受限的問題。為應(yīng)對(duì)CAN總線應(yīng)用問題,邁威通信
2023-05-08 10:12:29213 
在CAN總線通信的應(yīng)用領(lǐng)域中,很多客戶需要將CANID放在CAN報(bào)文中,這樣更方便接入不同的設(shè)備,有利于用戶通過模塊更方便的組建自己的網(wǎng)絡(luò),使用自定的應(yīng)用協(xié)議。但是要實(shí)現(xiàn)這樣的應(yīng)用,用戶往往需要
2023-05-15 10:30:53417 
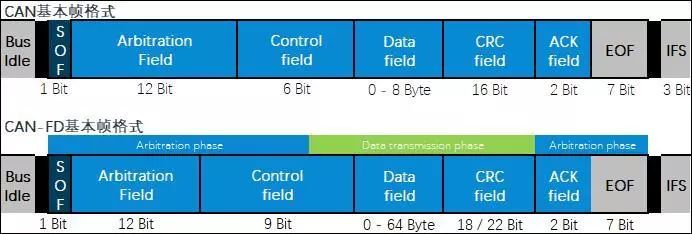
一幀CAN FD報(bào)文位數(shù) 根據(jù)CAN FD幀結(jié)構(gòu)組成,可以算出一幀CAN FD報(bào)文位數(shù): CAN FD報(bào)文位數(shù) = 幀起始(1位)+ 仲裁段(13/32位)+ 控制段(8位)+ 數(shù)據(jù)段(0~512
2023-07-18 10:48:184087 CAN總線協(xié)議目前廣泛應(yīng)用于汽車中各種不同控制器之間的通信,CAN總線的物理應(yīng)用是采用絕緣的雙絞線來進(jìn)行信號(hào)的傳輸,是世界上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線,CAN總線本身具有強(qiáng)大的抗干擾能力。
2023-08-11 11:10:29922 
在CAN總線領(lǐng)域,我們常會(huì)看到人們用不同的詞語描述信息傳輸速率,其中最常見的就是比特率(Bit Rate)和波特率(Baud)。
2023-08-14 15:41:10699 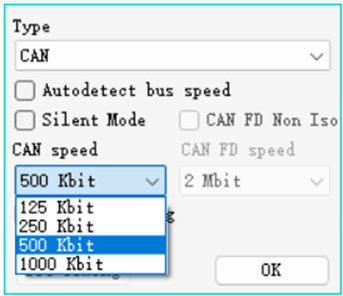
CAN總線的應(yīng)用越來越廣泛,工程師在各種不同工況下,如何選擇最合適的網(wǎng)絡(luò)拓?fù)浞绞侥兀勘酒恼聦⒔榻B主流的幾種總線拓?fù)浞绞剑约叭?b class="flag-6" style="color: red">何解決CAN總線故障。
2023-08-28 14:57:58234 can總線的傳輸速率是多少?? CAN(Controller Area Network)總線是一種控制區(qū)域網(wǎng)絡(luò),是一種高速串行通信總線,廣泛應(yīng)用于汽車、工業(yè)、醫(yī)療和家庭等領(lǐng)域。CAN總線是一種實(shí)時(shí)
2023-09-07 15:05:439442 虹科PCAN-DiagFD是一款用于CAN總線通信診斷的手持式診斷工具。可以基于協(xié)議層診斷CAN2.0和CANFD報(bào)文,也可以利用示波器功能和測(cè)量功能實(shí)現(xiàn)物理層測(cè)試。示波器功能用于CAN總線上的信號(hào)
2021-11-10 15:56:327 can總線傳輸距離? CAN總線是一種串行通信協(xié)議,常用于汽車行業(yè)中的數(shù)據(jù)通信。它被廣泛應(yīng)用于車載電子系統(tǒng),如發(fā)動(dòng)機(jī)控制單元、制動(dòng)系統(tǒng)、儀表盤和空調(diào)控制系統(tǒng)等。CAN總線的主要優(yōu)勢(shì)在于其高可靠性
2023-12-07 18:09:401216 TSMaster軟件平臺(tái)支持對(duì)不同總線(CAN、LIN、FlexRay)的報(bào)文和信號(hào)過濾,過濾方法一般有全局接收過濾、數(shù)據(jù)流過濾、窗口過濾、字符串過濾、可編程過濾,針對(duì)不同的總線信號(hào)過濾器的使用方法
2023-12-16 08:21:15206 
CAN總線協(xié)議是一種串行通訊協(xié)議,主要用于汽車和工業(yè)自動(dòng)化領(lǐng)域,實(shí)現(xiàn)了實(shí)時(shí)應(yīng)用的需求。 首先,CAN總線協(xié)議的基本概念包括報(bào)文、信息路由和位速率。在CAN系統(tǒng)中,總線上傳輸的信息以不同格式的報(bào)文發(fā)送
2024-01-19 17:47:57276 CAN總線為什么能在1Mbps上傳輸超過50M? CAN總線是一種被廣泛應(yīng)用于汽車和工業(yè)控制領(lǐng)域的串行通信協(xié)議。它可以提供高效、可靠和實(shí)時(shí)的通信,使得復(fù)雜的系統(tǒng)能夠?qū)崿F(xiàn)數(shù)據(jù)的傳輸和交流。然而,對(duì)于
2024-01-31 13:46:49270 高速CAN總線和低速CAN總線的特性 高速CAN總線和低速CAN總線是兩種常見的CAN總線類型。它們?cè)跀?shù)據(jù)傳輸速率、最大電纜長(zhǎng)度、適用場(chǎng)景等方面存在一些差異。下面將詳盡、詳實(shí)、細(xì)致地介紹這兩種CAN
2024-01-31 14:09:01497 can總線與485總線五大區(qū)別? CAN總線和485總線是現(xiàn)代工業(yè)自動(dòng)化領(lǐng)域中常見的兩種通信總線,它們都具有一定的優(yōu)勢(shì)和特點(diǎn)。 一、傳輸距離 CAN總線和485總線在傳輸距離上有著明顯的差異。CAN
2024-02-03 09:22:391583
 電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論