 電子發燒友App
電子發燒友App


在單片機開發中,UART、I2C、RS485等普遍在用,對它們的認識可能模棱兩可,本文把它們整理了一下。本文較長,閱讀時間大約10分鐘。
UART通用異步收發器 ???
??? UART是異步,全雙工串口總線。它比同步串口復雜很多。有兩根線,一根TXD用于發送,一根RXD用于接收。 ??? UART的串行數據傳輸不需要使用時鐘信號來同步傳輸,而是依賴于發送設備和接收設備之間預定義的配置。 ????對于發送設備和接收設備來說,兩者的串行通信配置應該設置為完全相同。

????起始位:表示數據傳輸的開始,電平邏輯為“0” 。 ????數據位:可能值有5、6、7、8、9,表示傳輸這幾個bit 位數據。一般取值為8,因為一個ASCII 字符值為8 位。 ????奇偶校驗位:用于接收方對接收到的數據進行校驗,校驗“1” 的位數為偶數(偶校驗) 或奇數(奇校驗),以此來校驗數據傳送的正確性,使用時不需要此位也可以。 ????停止位:表示一幀數據的結束。電平邏輯為“1”。 ????如果用通用IO口模擬UART總線,則需一個輸入口,一個輸出口。
I2C總線 ???
I2C總線是一種同步、半雙工雙向的兩線式串口總線。它由兩條總線組成:串行時鐘線SCL和串行數據線SDA。 ??? SCL線——負責產生同步時鐘脈沖。 ??? SDA線——負責在設備間傳輸串行數據。 ????該總線可以將多個I2C設備連接到該系統上。連接到I2C總線上的設備既可以用作主設備,也可以用作從設備。
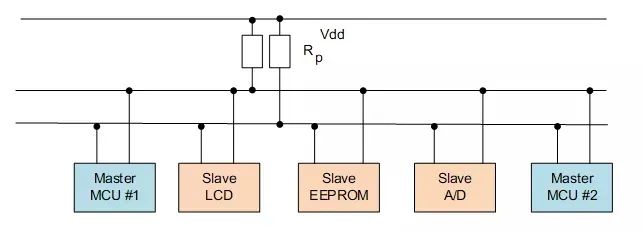
????主設備負責控制通信,通過對數據傳輸進行初始化,來發送數據并產生所需的同步時鐘脈沖。從設備則是等待來自主設備的命令,并響應命令接收。 ????主設備和從設備都可以作為發送設備或接收設備。無論主設備是作為發送設備還是接收設備,同步時鐘信號都只能由主設備產生。 ????如果用通用IO口模擬I2C總線,并實現雙向傳輸,則需一個輸入輸出口(SDA),另外還需一個輸出口(SCL)。
SPI串行外設接口
??? SPI總線是同步、全雙工雙向的4線式串行接口總線。它是由“單個主設備+多個從設備”構成的系統。 ????在系統中,只要任意時刻只有一個主設備是處于激活狀態的,就可以存在多個SPI主設備。常運用于AD轉換器、EEPROM、FLASH、實時時鐘、數字信號處理器和數字信號解碼器之間實現通信。
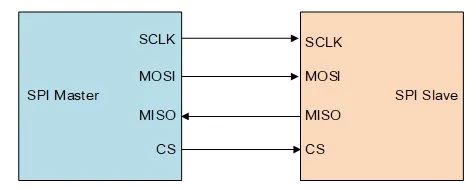
????為了實現通信,SPI共有4條信號線,分別是:
主設備出、從設備入(Master Out Slave In,MOSI):由主設備向從設備傳輸數據的信號線,也稱為從設備輸入(Slave Input/Slave Data In,SI/SDI)。
主設備入、從設備出(Master In Slave Out,MISO):由從設備向主設備傳輸數據的信號線,也稱為從設備輸出(Slave Output/Slave Data Out,SO/SDO)。
串行時鐘(Serial Clock,SCLK):傳輸時鐘信號的信號線。
從設備選擇(Slave Select,SS):用于選擇從設備的信號線,低電平有效。
SPI ? ? ?的工作時序模式由CPOL(Clock Polarity,時鐘極性)和CPHA(Clock Phase,時鐘相位)之間的相位關系決定,CPOL ? ? ?表示時鐘信號的初始電平的狀態,CPOL 為0 表示時鐘信號初始狀態為低電平,為1 表示時鐘信號的初始電平是高電平。CPHA ? ? ?表示在哪個時鐘沿采樣數據,CPHA 為0 表示在首個時鐘變化沿采樣數據,而CPHA 為1 則表示在第二個時鐘變化沿采樣數據。
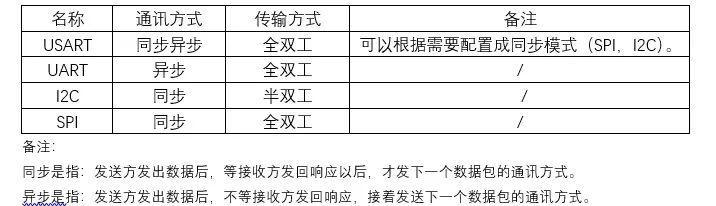
UART、SPI、I2C比較
I2C線更少,比UART、SPI更為強大,但是技術上也更加麻煩些,因為I2C需要有雙向IO的支持,而且使用上拉電阻,抗干擾能力較弱,一般用于同一板卡上芯片之間的通信,較少用于遠距離通信。
SPI實現要簡單一些,UART需要固定的波特率,就是說兩位數據的間隔要相等,而SPI則無所謂,因為它是有時鐘的協議。
I2C的速度比SPI慢一點,協議比SPI復雜一點,但是連線也比標準的SPI要少。
UART一幀可以傳5/6/7/8位,I2C必須是8位。I2C和SPI都從最高位開始傳。
SPI用片選信號選擇從機,I2C用地址選擇從機。
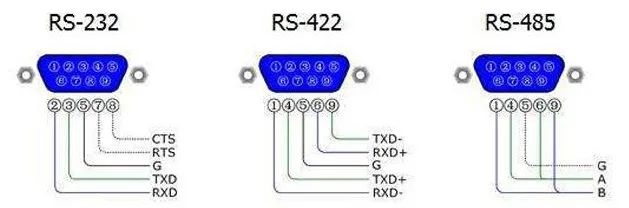
RS232串口通信 ????
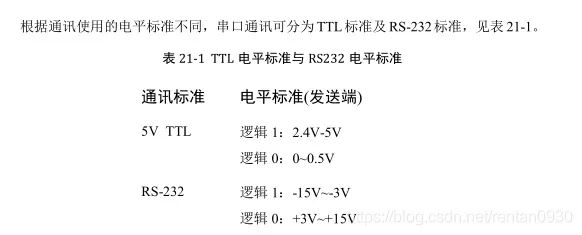
傳輸線有兩根,地線一根。電平是負邏輯: ????-3V~-15V邏輯“1”,+3V~+15V邏輯“0”。 ??? RS-232串口通信傳輸距離15米左右。可做到雙向傳輸,全雙工通訊,傳輸速率低20kbps 。 ????下圖是DB9公頭和母頭的定義,一般用的最多的是RXD、TXD、GND三個信號。

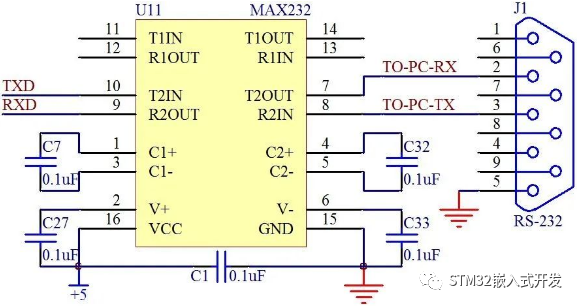
????TTL和RS-232互轉 ????
單片機接口一般是TTL電平,如果接232電平的外設,就需要加TTL轉RS232的模塊。如下圖,可用芯片MAX232進行轉換。
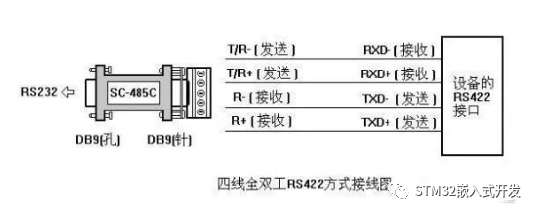
RS422串口通信 ???
RS-422有4根信號線:兩根發送、兩根接收和一根地線,是全雙工通信。 ????它有一個主設備,其余為從設備,從設備之間不能通信,所以RS-422支持點對多的雙向通信。
RS485串口通信 ???
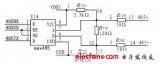
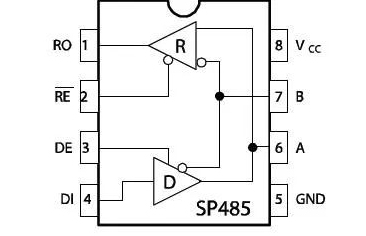
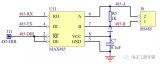
RS-485采用平衡發送和差分接收,因此具有抑制共模干擾的能力。 ????采用兩線半雙工傳輸,最大速率10Mb/s,電平邏輯是兩線的電平差來決定的,提高抗干擾能力,傳輸距離長(幾十米到上千米)。 ????+2V~+6V邏輯“1”,-2~-6V邏輯“0”。 ????TTL轉成RS-485很常見,比如MAX485,參考電路如下
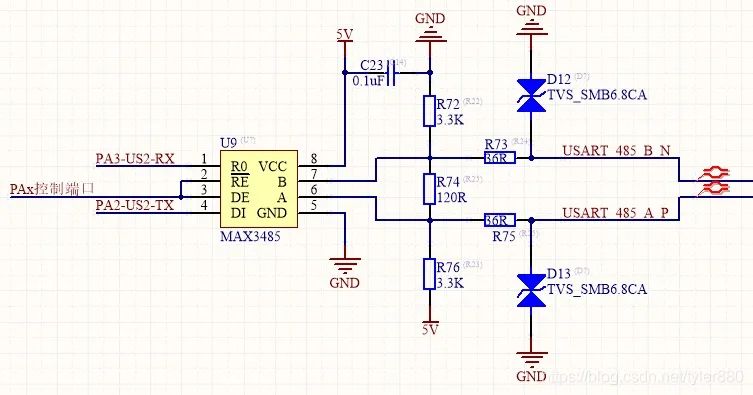
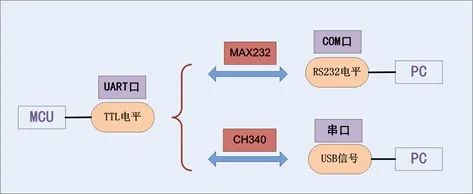
??? RE引腳:接收器輸出使能(低電平有效)。 ??? DE引腳:發送器輸出使能(高電平有效)。可以直接通過MCU的IO端口控制。 TTL ????嵌入式里面說的串口,一般是指UART口。4個pin(Vcc,GND,RX,TX),用TTL電平。 ??? PC中的COM口即串行通訊端口,簡稱串口。9個Pin,用RS232電平。

????串口、COM口是指的物理接口形式(硬件)。而TTL、RS-232、RS-485是指電平標準(電信號)。
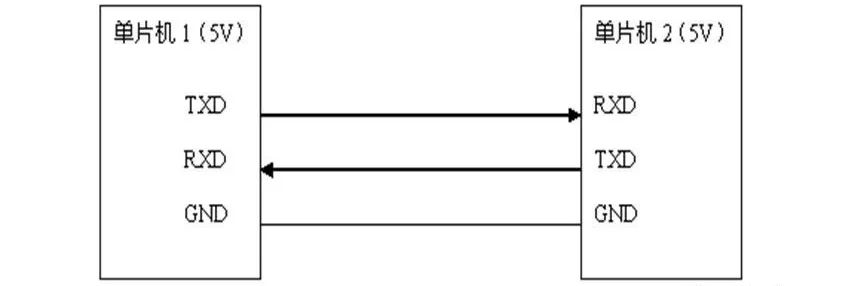
????單片機與PC通訊示意圖如下:
CAN總線 ???
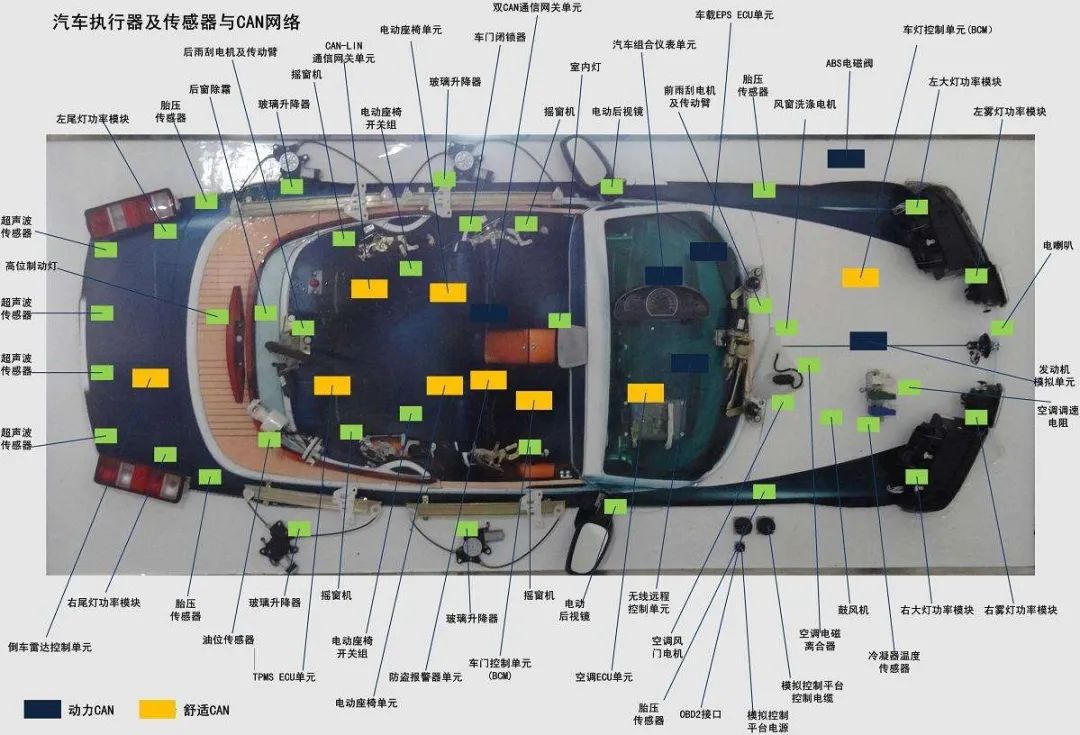
CAN是控制器局域網絡的簡稱,是一種能夠實現分布式實時控制的串行通信網絡。CAN總線的功能復雜且智能。主要用于汽車通信。 ????CAN總線網絡主要掛在CAN_H和CAN_L,各個節點通過這兩條線實現信號的串行差分傳輸,為了避免信號的反射和干擾,還需要在CAN_H和CAN_L之間接上120歐姆的終端電阻。
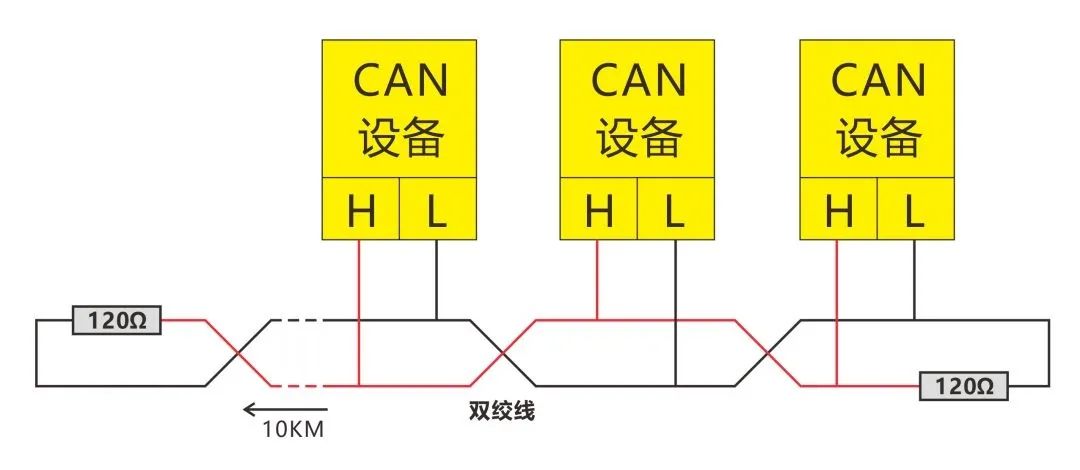
????每一個設備既可做主設備也可做從設備。CAN總線的通信距離可達10千米(速率低于5Kbps),速度可達1Mbps(通信距離小于40M)。
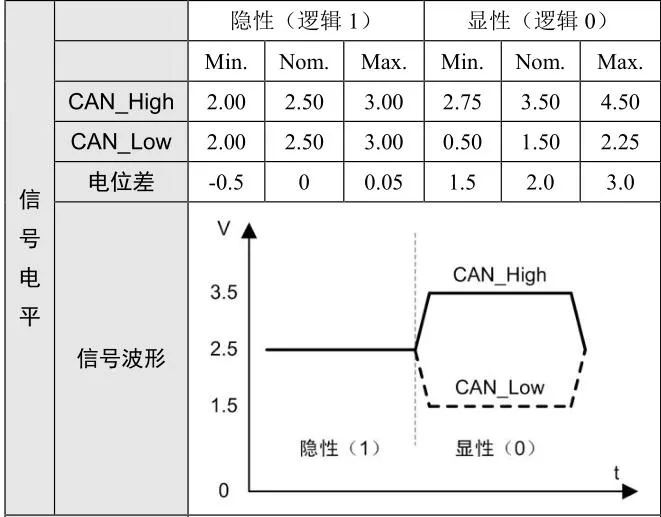
? CAN電平邏輯 ???
CAN總線采用"線與"的規則進行總線沖裁,1&0為0,所以稱0為顯性,1為隱性。 ????從電位上看,因為規定高電位為0,低電位為1,同時發出信號時實際呈現為高電位,從現象上看就像0覆蓋了1,所以稱0為顯性,1為隱性。
USB通信串行總線 ???
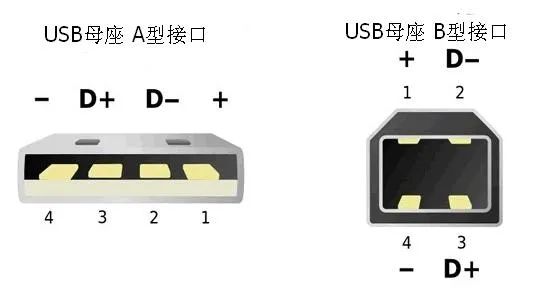
USB接口最少有四根線,其中有兩根是數據線,而所有的USB數據傳輸都是通過這兩根線完成。它的通信遠比串口復雜的多。 ????兩根數據線采用差分傳輸,即需要兩根數據線配合才能傳輸一個bit,因此是半雙工通信,同一時間只能發送或者接收。 ??? USB 規定,如果電壓電平不變,代表邏輯1;如果電壓電平變化,則代表邏輯0。
USB轉TTL ????
一般USB轉串口都是用CH340G芯片。

????用串口通信比USB簡單,因為串口通信沒有協議。
SD卡
?? SD卡是一種存儲卡,可用于手機作為內存卡使用。 ????嵌入式中,單片機與SD卡通信有兩種模式:
SPI總線通信模式
SD總線通信模式
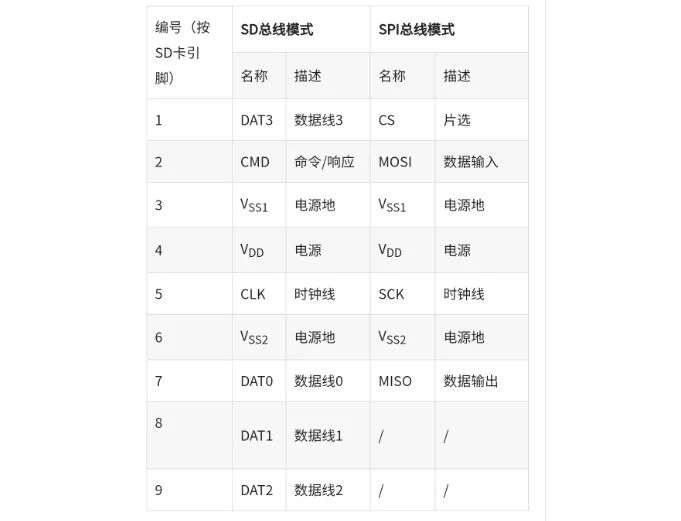
????值得注意的是,SD總線模式中有4條數據線;SPI總線模式中僅有一條數據線(MOSI和MISO不能同時讀數據,也不能同時寫數據);這樣在嵌入式中,單片機與SD卡通信時采用SD總線模式比SPI總線模式速度快幾倍。

1-WIRE總線 ??? 1-Wire由美國Dallas(達拉斯)公司推出,是一種異步半雙工串行傳輸。采用單根信號線,既傳輸時鐘又傳輸數據,而且數據傳輸是雙向的。
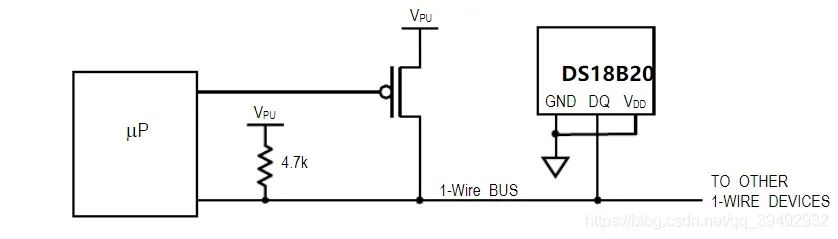
????單總線的數據傳輸速率一般為16.3Kbit/s,最大可達142 Kbit/s,通常情況下采用100Kbit/s以下的速率傳輸數據。 ??? 1-Wire線端口為漏極開路或三態門的端口,因此一般需要加上拉電阻Rp,通常選用5K~10KΩ ????主要應用在:打印墨盒或醫療消耗品的識別;印刷電路板、配件及外設的識別和認證。
DMA直接存儲器訪問
?? DMA是STM32內的一個硬件模塊,它獨立于CPU,在外圍設備和內存之間進行數據傳輸,解放了CPU,可使CPU的效率大大提高。
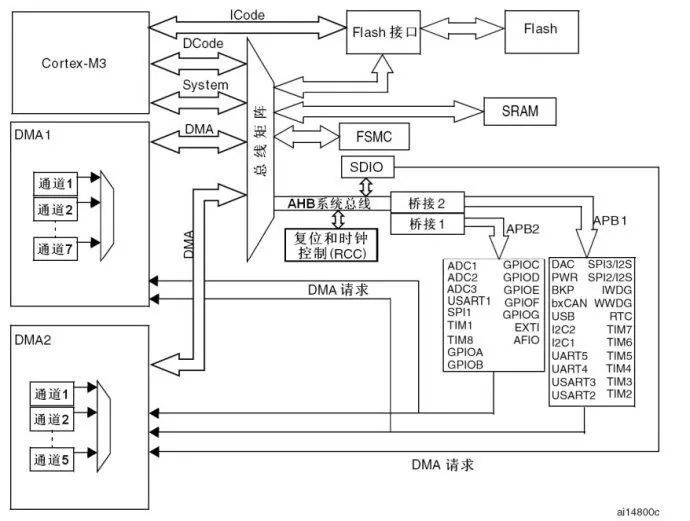
????它可以高速訪問外設、內存,傳輸不受CPU的控制,并且是雙向通信。因此,使用DMA可以大大提高數據傳輸速度,這也是ARM架構的一個亮點——DMA總線控制。 ??? DMA就相應于一條高速公路,專用、高速的特性。如果不使用DMA,也可以達到目的,只是達到目的的時間比較長。
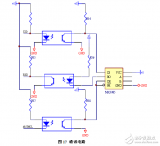
???以太網是目前應用最普遍的局域網技術。 ????大家知道,以太網接口可分為協議層和物理層。 ????協議層是由一個叫MAC(Media Access Layer)控制器的單一模塊實現。 ????物理層由兩部分組成,即PHY(Physical Layer)和傳輸器。 ????目前很多主板的南橋芯片已包含了以太網MAC控制功能,只是未提供物理層接口。因此,需外接PHY芯片以提供以太網的接入通道。
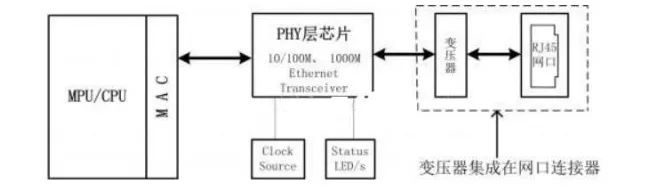
????網絡變壓器的作用是:
耦合差分信號,抗干擾能力更強
變壓器隔離網線端不同設備的不同電平,隔離直流信號
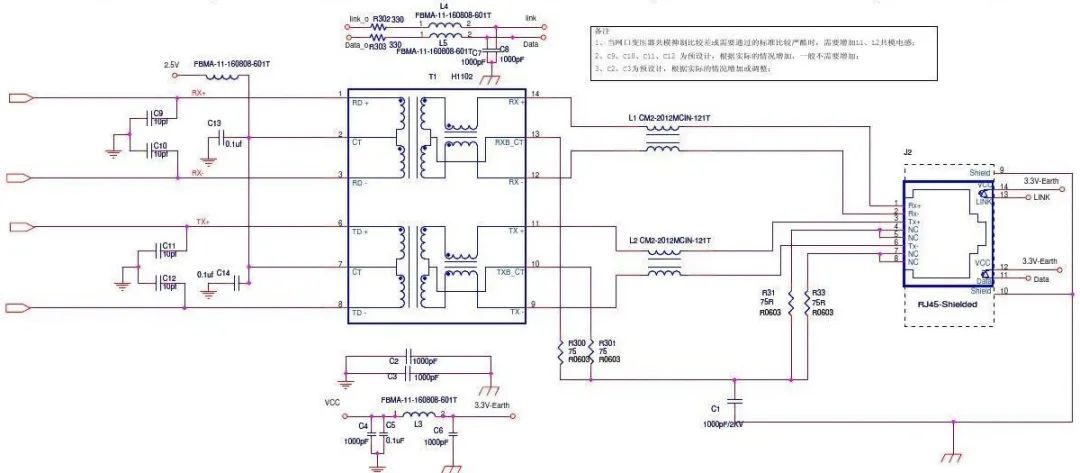
以太網接口參考電路,如下圖所示。
編輯:黃飛
?













 工商網監
工商網監
評論