 電子發燒友App
電子發燒友App


I2C作為常用的通訊外設,廣泛應用在各種通訊場合,而且也衍生各種變體協議,比如SCCB,SMbus,PMbus等等。先楫半導體在I2C這個通訊外設上,每個傳輸的階段都可以獨立自由去控制,這也極大得提高了開發的自由靈活度,而且也可以隨性發揮生成I2C的變體協議,而不需要去進行IO模擬。
首先介紹一下先楫半導體I2C的一些主要特性和功能,方便后續說明,大家也可以到官網參考先楫用戶手冊。
1?I2C 特征
支持標準模式 (100Kb/s),快速模式 (400Kb/s) 和快速模式 +(1Mb/s)
可配置主從模式
支持 7 位和 10 位地址模式
支持廣播呼叫地址 (general call address)
自動時鐘延展 (clock stretching)
可配置的時鐘/數據時序
支持直接內存訪問 (DMA)
4 字節 FIFO
2?I2C 功能
每個傳輸由 4 個階段組成:起始,地址,數據和結束。在起始階段會產生 START 操作,在地址階段發送地址,在數據階段 1 個或多個數據字節被傳送,在結束階段產生 STOP 操作。每個階段都能夠獨立控制是否執行
4個字節FIFO,可不使用DMA的情況下,滿足多字節一次性傳輸。并且軟件沒有準備好下一個字節的收發數據或者FIFO已滿時候,I2C控制器會自動延展I2C總線時鐘來暫停總線傳輸。
I2C控制器默認使能了自動ACK響應,即是除了最后一個字節外其余字節接收后都會自動發出ACK,軟件可以使能字節接收中斷來禁止自動響應功能,軟件自己接收后決定是否發送ACK。
3?場合需求
在某些場合,當I2C作為主機的時候,一次數據量傳輸當中,可能會有以下的需求方式:
傳輸過程中間變化讀寫方向,比如START操作到第一個數據字節傳輸是寫,后面變為讀。或者讀變成寫。
傳輸過程中分三次傳輸,START,數據,STOP傳輸。比如第一次傳輸需要帶START,但不需要STOP。
傳輸過程中需要restart重新發送start信號。
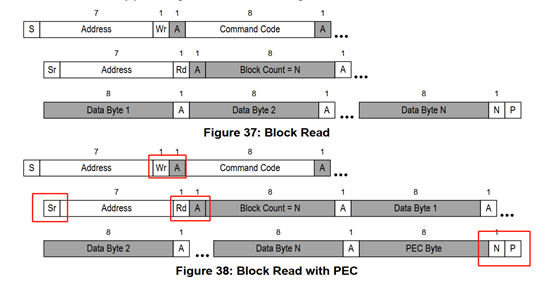
舉例,比如SMBUS,在進行block read傳輸中,就需要傳輸過程中發送restart信號,并且切換讀寫方向。
4?實現方式
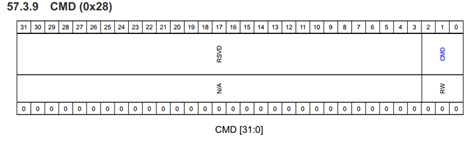
先楫半導體的用戶手冊對于 I2C 的寄存器說明一共有好幾個,本文重點介紹以下三個密切相關的寄存器:
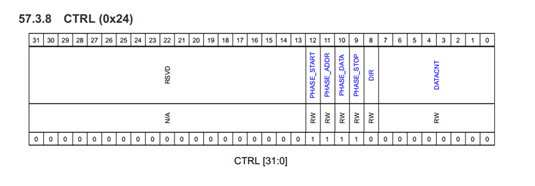
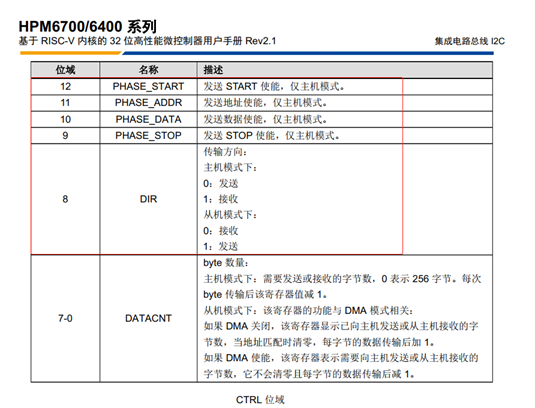
1. CTRL寄存器:該寄存器是用來配置一次傳輸中的每個階段的控制,比如主機模式下,方向是發送,在START開始后,STOP結束前,傳輸的是數據段,可以不發START,地址,STOP。那么可以對其寄存器的對應位進行開啟和關閉。
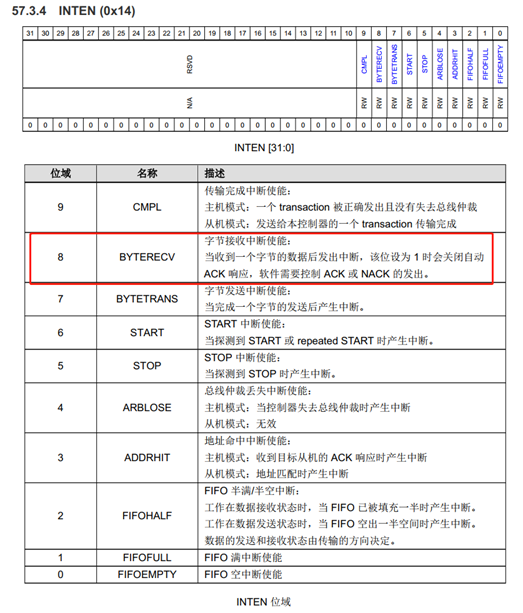
2. INTEN寄存器的BYTERECV位,開啟或關閉自動響應功能。
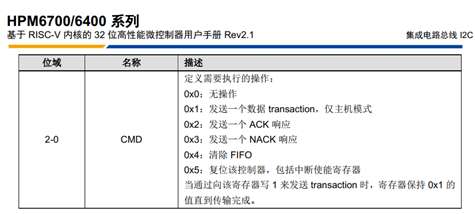
3. CMD寄存器:定義的是對一次transaction的相關操作。比如主機在接收到從機的數據,需要不接受數據了,可以發送一個NACK響應。前提是關閉了自動響應功能。
根據以上的寄存器說明,在新的sdk版本V1.2.0中,我們在SDK的i2c driver中看到有定義一個順序傳輸接口,定義一個枚舉,分別表示第一幀,中間幀,最后一幀。
/**
* @brief I2c sequentialtransfer options
* @arg: i2c_frist_frame: hasstart signal
* @arg: i2c_next_frame:middle transfer
* @arg: i2c_last_frame: hasstop signal
*/
typedef enum i2c_seq_transfer_opt{
? i2c_frist_frame = 0,
? i2c_next_frame,
? i2c_last_frame,
}i2c_seq_transfer_opt_t;
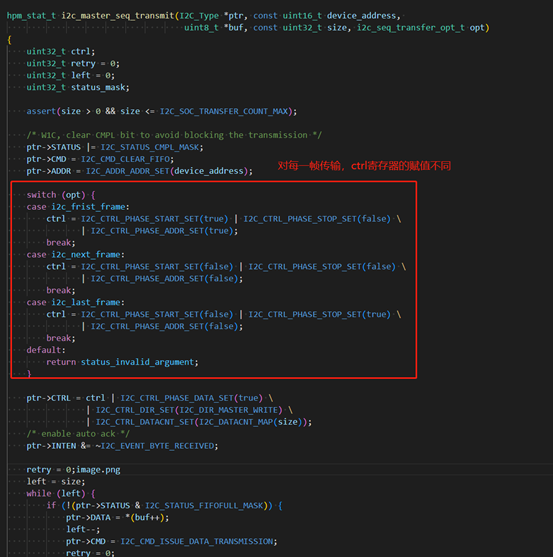
對于發送接口,sdk1.2也提供了i2c_master_seq_transimit 這個 API。
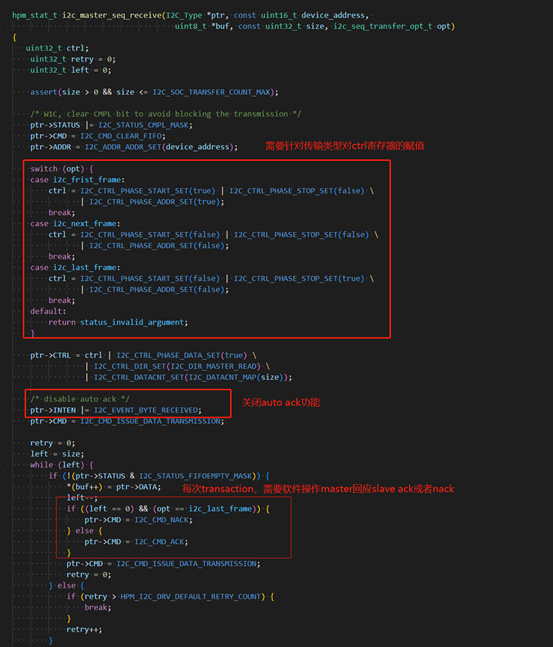
對于接收接口,sdk1.2也提供了i2c_master_seq_receive這個API,從內部API可以看出是關閉自動響應,軟件控制一次傳輸的ACK和NACK,避免STOP未出現時出現數據斷開。
5?驗證功能
根據以上信息,我們來操作一個實驗,以sdk的poll例子的master和slave兩個開發板進行相互收發,slave不做改動,master的讀寫接口替換以上的接口。
int main(void)
{
?hpm_stat_t stat;
?i2c_config_t config;
?uint32_t freq;
?board_init();
?init_i2c_pins(TEST_I2C);
?config.i2c_mode = i2c_mode_normal;
?config.is_10bit_addressing = false;
?freq = clock_get_frequency(TEST_I2C_CLOCK_NAME);
?stat = i2c_init_master(TEST_I2C, freq, &config);
?if (stat != status_success) {
?? ? return stat;
?}
?printf("I2C polling master example ");
?prepare_tx_data();
?uint32_t index = 0;
?uint32_t inc_len = 30;
?if (status_success != i2c_master_seq_transmit(TEST_I2C, TEST_I2C_SLAVE_ADDRESS, &tx_buff[index], inc_len, i2c_frist_frame)) {
?? ? printf("Master transfer frist frame failed ");
?? ? while (1) {
?? ? }
?}
?index += inc_len;
?if (status_success != i2c_master_seq_transmit(TEST_I2C, TEST_I2C_SLAVE_ADDRESS, &tx_buff[index], inc_len, i2c_next_frame)) {
?? ? printf("Master transfer next frame failed ");
?? ? while (1) {
?? ? }
?}
?index += inc_len;
?inc_len = (sizeof(tx_buff) - (inc_len * 2));
?if (status_success != i2c_master_seq_transmit(TEST_I2C, TEST_I2C_SLAVE_ADDRESS, &tx_buff[index], inc_len, i2c_last_frame)) {
?? ? printf("Master transfer last frame failed ");
?? ? while (1) {
?? ? }
?}
?/* wait for slave controller to be ready to send data */
?board_delay_ms(100);
?index = 0;
?inc_len = 30;
?if (status_success != i2c_master_seq_receive(TEST_I2C, TEST_I2C_SLAVE_ADDRESS, &rx_buff[index], inc_len, i2c_frist_frame)) {
?? ? printf("Master transfer read frist framefailed ");
?? ? while (1) {
?? ? }
?}
?index += inc_len;
?if (status_success != i2c_master_seq_receive(TEST_I2C, TEST_I2C_SLAVE_ADDRESS, &rx_buff[index], inc_len, i2c_next_frame)) {
?? ? printf("Master transfer read next framefailed ");
?? ? while (1) {
?? ? }
?}
?index += inc_len;
?inc_len = (sizeof(tx_buff) - (inc_len * 2));
?if (status_success != i2c_master_seq_receive(TEST_I2C, TEST_I2C_SLAVE_ADDRESS, &rx_buff[index], inc_len, i2c_last_frame)) {
?? ? printf("Master transfer read last framefailed ");
?? ? while (1) {
?? ? }
?}
?check_transfer_data();
?while (1) {
?}
?return 0;
}
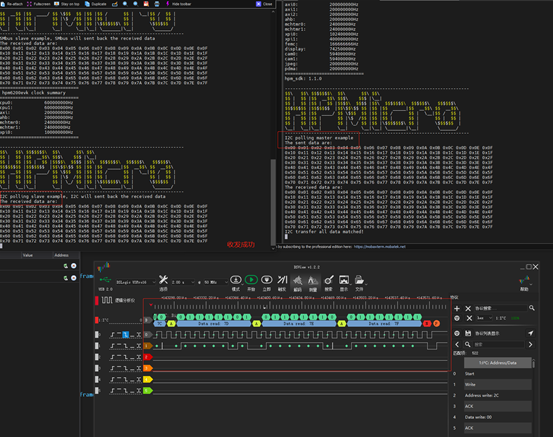
實驗現象
①?當把一次完整傳輸拆分三次frame傳輸時候,依舊是沒什么問題的。可見以上的功能使用并沒有什么問題。
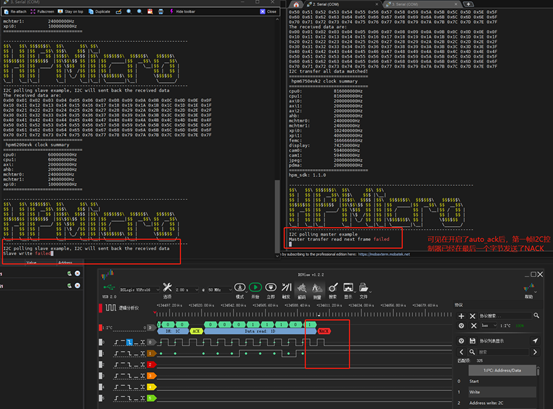
② 可以模擬下一個配置錯誤的現象,開啟auto-ack功能,master接收slave數據的數據,由于開啟了自動響應,在第一包frame接收的時候,I2C控制器認為傳輸到最后一個字節,會自動補充NACK,但我們并不希望補充NACK,因為一次完整的傳輸還沒完成,這時候就需要軟件自己添加ACK或者NACK。
6?小 結
對于I2C,無論是poll方式,還是中斷方式,還是DMA方式,先楫的I2C控制器對于I2C傳輸的每個階段都是可控的,這為開發者的應用需求也極大提高軟件靈活度。
本文介紹到此結束,
所以,看完之后,你會了嗎?
?
?
“先楫半導體”(HPMicro)是一家致力于高性能嵌入式解決方案的半導體公司,總部位于上海,產品覆蓋微控制器、微處理器和周邊芯片,以及配套的開發工具和生態系統。公司成立于2020年6月,總部坐落于上海市張江高科技園區,并在天津、深圳和蘇州均設立分公司。核心團隊來自世界知名半導體公司管理團隊,具有15年以上,超過20個SoC的豐富的研發及管理經驗。先楫半導體以產品質量為本,所有產品均通過嚴格的可靠性測試。目前已經量產的高性能通用MCU產品系列HPM6700/6400、HPM6300及HPM6200,性能領先國際同類產品并通過AEC-Q100認證。公司已完成ISO9001質量管理認證和ISO 26262功能安全管理體系ASIL D認證,全力服務中國乃至全球的工業、汽車和能源市場。
?










 工商網監
工商網監
評論