本文利用PIC16F874設(shè)計(jì)了基于CAN總線的一種車(chē)輛遠(yuǎn)程故障診斷系統(tǒng)。該系統(tǒng)設(shè)計(jì)新穎,具備很好的應(yīng)用前景,有關(guān)提供車(chē)輛信息技術(shù)服務(wù)(tsp)的網(wǎng)站也在籌建中。
2013-02-20 10:56:54 2702
2702 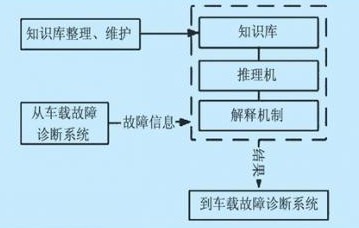
“ 總線關(guān)閉(bus off)是CAN節(jié)點(diǎn)比較重要的錯(cuò)誤處理機(jī)制。那么,在總線關(guān)閉狀態(tài)下,CAN節(jié)點(diǎn)的恢復(fù)流程是怎樣的?又該如何理解節(jié)點(diǎn)恢復(fù)流程的“快恢復(fù)”和“慢恢復(fù)”機(jī)制?本文將為大家詳細(xì)分析總線
2020-08-04 11:16:0013380 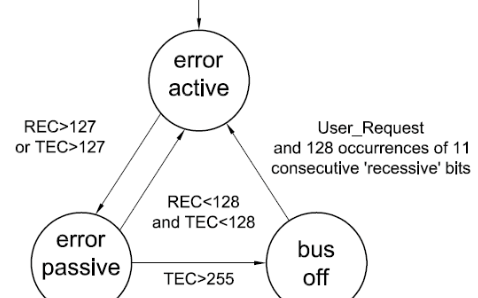
為了防止故障節(jié)點(diǎn)干擾甚至阻塞整個(gè)CAN網(wǎng)絡(luò)系統(tǒng),CAN協(xié)議實(shí)現(xiàn)了復(fù)雜的故障限制機(jī)制。為了保證通信的正常,CAN 2.0 總線協(xié)議總線中各節(jié)點(diǎn)需要采取以下措施進(jìn)行錯(cuò)誤檢測(cè)。
2022-11-08 17:12:447486 在ISO 11898-2和ISO 11898-3中分別規(guī)定了兩種CAN總線結(jié)構(gòu)(在BOSCH CAN2.0規(guī)范中,并沒(méi)有關(guān)于總線拓?fù)浣Y(jié)構(gòu)的說(shuō)明):高速CAN總線和低速CAN總線,區(qū)別表如下所示。
2023-04-07 09:30:181836 
為了防止故障節(jié)點(diǎn)干擾甚至阻塞整個(gè)CAN網(wǎng)絡(luò)系統(tǒng),CAN協(xié)議實(shí)現(xiàn)了復(fù)雜的故障限制機(jī)制。為了保證通信的正常,CAN 2.0 總線協(xié)議總線中各節(jié)點(diǎn)需要采取以下措施進(jìn)行錯(cuò)誤檢測(cè):
2023-06-21 17:14:181840 
在檢查數(shù)據(jù)總線系統(tǒng)前,須保證所有與數(shù)據(jù)總線相連的電控單元無(wú)功能故障。功能故障指不會(huì)直接影響數(shù)據(jù)總線系統(tǒng),但會(huì)影響某一系統(tǒng)的功能流程的故障。如傳感器損壞,其結(jié)果就是傳輸器信號(hào)不能通過(guò)數(shù)據(jù)總線傳遞。這種
2023-09-15 10:41:014991 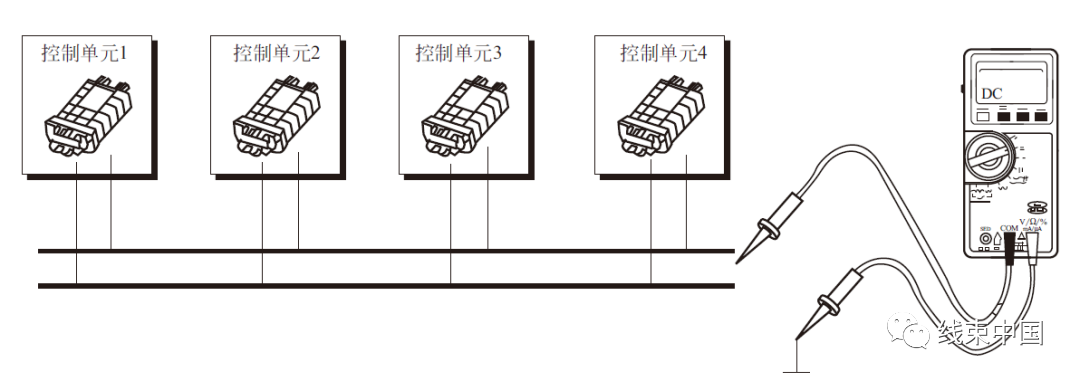
自動(dòng)關(guān)閉故障節(jié)點(diǎn)。(11),連接:CAN串行通信鏈路是一條眾多單元均可被連接的總線,理論上單元數(shù)目是無(wú)限的,實(shí)際上,單元總數(shù)受限于延遲時(shí)間和總線的電器負(fù)載。(12),應(yīng)答:所有接收器均對(duì)接收?qǐng)?bào)文的相容性
2014-04-27 15:16:02
自動(dòng)關(guān)閉故障節(jié)點(diǎn)。(11),連接:CAN串行通信鏈路是一條眾多單元均可被連接的總線,理論上單元數(shù)目是無(wú)限的,實(shí)際上,單元總數(shù)受限于延遲時(shí)間和總線的電器負(fù)載。(12),應(yīng)答:所有接收器均對(duì)接
2014-04-18 16:36:30
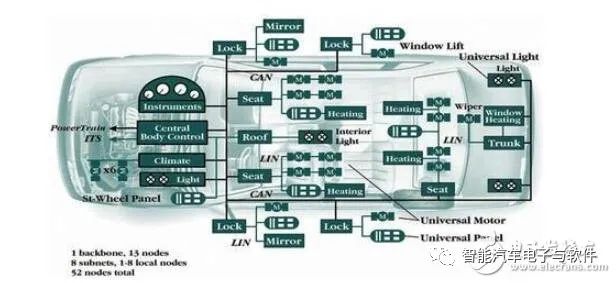
控制器局域網(wǎng)絡(luò)CAN(Controller Area Network)為汽車(chē)內(nèi)部各種復(fù)雜的電子設(shè)備、控制器、測(cè)量?jī)x器等提供了統(tǒng)一數(shù)據(jù)交換渠道,已得到廣泛的應(yīng)用。目前,太多數(shù)汽車(chē)部件都提供了CAN總線通信接口。
2019-07-31 06:31:02
CAN總線的基本工作原理是什么?CAN總線工作流程是怎樣的?CAN總線的優(yōu)勢(shì)是什么?如何計(jì)算CAN總線負(fù)載率?
2021-12-27 07:39:55
一、CAN總線通信初始化配置流程CAN總線GPIO和時(shí)鐘配置CAN總線RX0 中斷優(yōu)先級(jí)配置CAN總線初始化配置1. CAN總線GPIO和時(shí)鐘配置CAN引腳配置:CAN時(shí)鐘配置:具體代碼如下
2021-08-19 08:22:26
我們先簡(jiǎn)單總結(jié)一下CAN的錯(cuò)誤處理與故障界定:1.CAN控制器記錄發(fā)生在發(fā)送/接收過(guò)程中,總線數(shù)據(jù)出現(xiàn)錯(cuò)誤的總數(shù)(位錯(cuò)誤,CRC錯(cuò)誤等)。2.CAN控制器根據(jù)總線出錯(cuò)數(shù)量由低到高,依次處于主動(dòng)錯(cuò)誤
2021-08-20 06:18:45
由于can總線上受到干擾,運(yùn)行一段時(shí)間后數(shù)據(jù)接收和發(fā)送不是很流暢,所以定時(shí)想將CAN進(jìn)行關(guān)閉再重新打開(kāi)(即device_close和device_open操作),但是程序會(huì)卡在重新打開(kāi)的device_open里
2023-08-04 16:21:46
STM32 中的CAN總線模塊是具有故障監(jiān)測(cè)功能的就是CANx_SCE_IRQHandler這個(gè)用的很少,它叫CAN總線狀態(tài)改變中斷通過(guò)打開(kāi)這個(gè)中斷,配合代碼可以精確的監(jiān)測(cè)CAN總線的故障情況就是
2021-08-19 08:20:11
得很奇怪。它有時(shí)工作正常,有時(shí)根本不工作(代碼沒(méi)有任何變化)。所以我調(diào)查了警報(bào)標(biāo)志,我意識(shí)到 ESP32 在 CAN 總線上看到錯(cuò)誤,結(jié)果它進(jìn)入“錯(cuò)誤被動(dòng)”狀態(tài)并最終進(jìn)入“總線關(guān)閉”狀態(tài)。我的應(yīng)用程序
2023-04-12 07:40:45
Uart2any用于監(jiān)視和調(diào)試設(shè)備通信;U2carbus適用于如下場(chǎng)合: 對(duì)車(chē)輛總線通信的診斷、監(jiān)測(cè)及故障分析;車(chē)輛用總線產(chǎn)品的研發(fā);Can總線設(shè)備通信監(jiān)測(cè)及維護(hù);Lin總線設(shè)備通信監(jiān)測(cè)及維護(hù);其他
2014-05-06 13:38:41
VXI/GPIB總線的通信設(shè)備測(cè)試診斷系統(tǒng)設(shè)計(jì) 通信設(shè)備傳統(tǒng)的維修主要采用分立
2009-11-16 15:08:16
申請(qǐng)理由:目前市面上流行的都是燃油車(chē)的OBD的CAN診斷設(shè)備。而電動(dòng)車(chē)和混合動(dòng)力汽車(chē)沒(méi)有一個(gè)統(tǒng)一的診斷標(biāo)準(zhǔn)。隨著御捷車(chē)業(yè)集團(tuán)的發(fā)展,先繼續(xù)一套CAN總線診斷設(shè)備用于研發(fā)和售后維修。而AWorks
2015-07-20 22:22:24
申請(qǐng)理由:目前市面上流行的都是燃油車(chē)的OBD的CAN診斷設(shè)備。而電動(dòng)車(chē)和混合動(dòng)力汽車(chē)沒(méi)有一個(gè)統(tǒng)一的診斷標(biāo)準(zhǔn)。隨著御捷車(chē)業(yè)集團(tuán)的發(fā)展,先繼續(xù)一套CAN總線診斷設(shè)備用于研發(fā)和售后維修。而AWorks
2015-07-21 08:34:44
,電子工程,自控,計(jì)算機(jī)科學(xué),軟件工程或其他相關(guān)專(zhuān)業(yè); 2. 熟悉車(chē)身電子系統(tǒng)或模塊常規(guī)功能,熟悉汽車(chē)電子開(kāi)發(fā)流程; 3. 熟悉汽車(chē)行業(yè)CAN/LIN總線協(xié)議和標(biāo)準(zhǔn),采用的主流診斷協(xié)議,OSEK NM
2016-09-07 11:48:06
為了縮短排除電路板故障的時(shí)間,提高維修質(zhì)量,我們研制了基于VXI總線儀器的電路板故障診斷系統(tǒng),對(duì)上述電路板進(jìn)行故障檢測(cè)和診斷,且將故障定位到元器件級(jí)。
2021-04-25 08:26:33
完整, 雙CAN 冗余應(yīng)用需要實(shí)現(xiàn)總線狀態(tài)監(jiān)控、網(wǎng)絡(luò)故障的診斷和標(biāo)識(shí), 這就要通過(guò)添加軟件冗余模塊來(lái)實(shí)現(xiàn)。冗余模塊在程序主循環(huán)中調(diào)用, 根據(jù)不同總線錯(cuò)誤狀態(tài)執(zhí)行收發(fā)通道切換。CAN 總線錯(cuò)誤狀態(tài)分為3
2014-11-25 13:38:02
我有一個(gè)在PSoC 4200 L中使用CAN控制器的設(shè)計(jì)。該組件的數(shù)據(jù)表表示,當(dāng)總線關(guān)閉重啟選項(xiàng)被設(shè)置為手動(dòng)時(shí),如果總線被關(guān)閉,用戶(hù)/代碼必須重新啟動(dòng)CAN。要重新啟動(dòng)CAN組件,究竟
2018-10-24 16:47:03
可更換單元,可有效提高我軍裝備機(jī)動(dòng)保障的能力,符合裝備綜合保障的未來(lái)發(fā)展要求。【關(guān)鍵詞】:PXI總線;;數(shù)字電路;;故障診斷【DOI】:CNKI:SUN:JZCK.0.2010-02-028【正文快照
2010-05-13 09:08:39
基于VXI總線儀器的電路板故障診斷系統(tǒng),對(duì)上述電路板進(jìn)行故障檢測(cè)和診斷,且將故障定位到元器件級(jí)。1. 故障診斷系統(tǒng)的硬件 VXI(VME bus extension
2018-11-23 16:37:12
CANScope分析儀是什么?如何快速判斷CAN總線的故障節(jié)點(diǎn)?
2021-05-20 06:44:41
本文設(shè)計(jì)一款基于2.4G射頻的車(chē)栽CAN總線故障診斷儀,詳細(xì)介紹其工作原理及系統(tǒng)硬件電路,最后分別闡述接收端、發(fā)射端和PC端的軟件模塊。該方案采用自動(dòng)跳頻的2.4G空中協(xié)議,經(jīng)測(cè)試統(tǒng)計(jì)誤碼率保持在
2021-05-13 06:49:39
本文提出了一種基于車(chē)載CAN總線故障診斷儀設(shè)計(jì)方案。
2021-05-12 06:24:53
有效數(shù)據(jù),這樣可以有效保證數(shù)據(jù)的實(shí)效性和準(zhǔn)確性。傳統(tǒng)的轎車(chē)在機(jī)艙和車(chē)身內(nèi)需要埋設(shè)大量線束以傳遞傳感器采集的信號(hào),而Can-Bus總線技術(shù)的應(yīng)用可以大量減少車(chē)體內(nèi)線束的數(shù)量,線束的減少則降低了故障發(fā)生
2015-06-24 13:56:39
、通訊失敗的故障診斷功能測(cè)試等內(nèi)容。由于CAN總線使用背景的不同,其應(yīng)用層的內(nèi)容也有很大差別,因此應(yīng)用層測(cè)試的內(nèi)容也存在較大差異,需要根據(jù)項(xiàng)目的設(shè)計(jì)需求以及設(shè)計(jì)文檔仔細(xì)制定應(yīng)用層測(cè)試的內(nèi)容。值得注意的是,對(duì)于CAN總線網(wǎng)絡(luò)測(cè)試,其應(yīng)用層測(cè)試一般不涉及功能測(cè)試的范圍,功能測(cè)試一般屬于ECU測(cè)試的范疇。
2015-08-11 13:41:18
本文提出了一種基于車(chē)載CAN總線故障診斷儀設(shè)計(jì)方案。
2021-05-13 07:06:39
RS485總線的基本特性是什么?RS485總線的傳輸距離是多少?RS485總線在現(xiàn)場(chǎng)應(yīng)用中常見(jiàn)的幾種通訊故障?如何診斷RS485總線通訊不穩(wěn)定的現(xiàn)場(chǎng)問(wèn)題?
2021-05-20 07:00:43
基于DSP和CAN總線的機(jī)車(chē)故障數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)
2009-05-08 17:19:01 16
16 將CAN 總線網(wǎng)絡(luò)與Ethernet(車(chē)間以太網(wǎng))、Internet 結(jié)合,本文提出了基于CAN 總線的DNC 遠(yuǎn)程診斷及監(jiān)控系 統(tǒng),研究了該系統(tǒng)的體系結(jié)構(gòu)、各部分的功能及相互關(guān)系,并探討了該系統(tǒng)實(shí)
2009-05-26 15:38:203 將CAN 總線網(wǎng)絡(luò)與Ethernet(車(chē)間以太網(wǎng))、Internet 結(jié)合,本文提出了基于CAN 總線的DNC 遠(yuǎn)程診斷及監(jiān)控系統(tǒng),研究了該系統(tǒng)的體系結(jié)構(gòu)、各部分的功能及相互關(guān)系,并探討了該系統(tǒng)實(shí)現(xiàn)
2009-05-26 16:22:1424 介紹了支持JTAG 標(biāo)準(zhǔn)的數(shù)字集成電路(IC)芯片結(jié)構(gòu)、故障測(cè)試模式和運(yùn)用邊界掃描故障測(cè)試的原理。實(shí)驗(yàn)中分析了數(shù)字IC 互連故障類(lèi)型、一般故障診斷流程和互連故障的
2009-11-14 09:01:5112 流程圖由于其邏輯清晰、簡(jiǎn)單易懂,在故障診斷方面有著廣泛的應(yīng)用。本文以數(shù)控設(shè)備CRT無(wú)顯示的故障診斷、模塊交換法中的故障診斷以及在伺服系統(tǒng)中故障診斷的應(yīng)用為例,說(shuō)明
2010-01-16 13:42:3624 汽車(chē)CAN/LIN總線測(cè)試流程和測(cè)試工具解析
汽車(chē)CAN/LIN總線系統(tǒng)測(cè)試的關(guān)鍵是測(cè)試流程、測(cè)試標(biāo)準(zhǔn)和測(cè)試工具,掌握專(zhuān)業(yè)的總線分析和測(cè)試工具的使用技
2010-03-19 10:44:488041 本文提出了一種基于車(chē)載CAN總線故障診斷儀設(shè)計(jì)方案。本方案成本低廉,攜帶方便,具有很強(qiáng)的靈活性與適應(yīng)性。1 方案設(shè)計(jì)系統(tǒng)總體設(shè)計(jì)框圖如圖l所示。系
2010-07-02 18:05:291325 
介紹了支持JTAG 標(biāo)準(zhǔn)的IC 芯片結(jié)構(gòu)和故障測(cè)試的4-wire 串行總線,以及運(yùn)用 邊界掃描 故障診斷的原理。實(shí)驗(yàn)中分析了IC 故障類(lèi)型、一般故障診斷流程和進(jìn)行掃描鏈本身完整性測(cè)試的方案
2011-07-04 15:08:4730 為了解決某裝置故障診斷的難題,提出了一種基于PC104總線的便攜式故障診斷裝置的設(shè)計(jì)方案。分析了采用模塊化結(jié)構(gòu)設(shè)計(jì)的硬件,介紹了利用多媒體技術(shù)實(shí)現(xiàn)的專(zhuān)家系統(tǒng)。
2011-08-30 10:47:131546 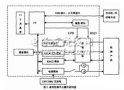
為確保高速磁懸浮列車(chē)可靠運(yùn)行,設(shè)計(jì)了基于 CAN 的車(chē)載診斷網(wǎng)絡(luò)系統(tǒng)。它對(duì)車(chē)載設(shè)備診斷信息進(jìn)行采集、分析和診斷,形成各車(chē)載設(shè)備的詳細(xì)診斷信息,提供給地面人員和列車(chē)駕駛員參考。介紹了CAN總線技術(shù)及其
2016-04-18 10:28:467 微處理器,設(shè)計(jì)一個(gè)用于氣體監(jiān)測(cè)的CAN總線網(wǎng)絡(luò),給出了基本CAN 節(jié)點(diǎn)的硬件原理圖和程序流程圖,闡述CAN 總線調(diào)試過(guò)程一些細(xì)節(jié)和經(jīng)驗(yàn)。
2016-10-11 15:35:0134 或原廠專(zhuān)用故障診斷儀,昂貴的價(jià)格制約了這些檢測(cè)設(shè)備進(jìn)入中小維修企業(yè)。近年來(lái)國(guó)內(nèi)市場(chǎng)上出現(xiàn)的汽車(chē)CAN總線檢測(cè)儀,輕松地化解了這一難題。
2017-09-04 16:28:1712 割集重要度大的部件優(yōu)先檢測(cè)的順序生成診斷流程,提示操作人員按照流程進(jìn)行診斷并找出故障源。該診斷流程提高了診斷效率,可以用于導(dǎo)引頭的快速診斷。
2017-11-10 11:25:5720 CAN總線系統(tǒng)中擁有一個(gè)CAN控制器、一個(gè)信息收發(fā)器、兩個(gè)數(shù)據(jù)傳輸終端及兩條數(shù)據(jù)傳輸總線,除了數(shù)據(jù)總線外,其他各元件都置于各控制單元的內(nèi)部。分析CAN總線系統(tǒng)產(chǎn)生故障的原因
2017-11-27 11:01:45317841 ),是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。 在北美和西歐,CAN總線協(xié)議已經(jīng)成為汽車(chē)計(jì)算機(jī)控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線,并且擁有以CAN為底層協(xié)議專(zhuān)為大型貨車(chē)和重工機(jī)械車(chē)輛設(shè)計(jì)的J1939協(xié)議。
2017-12-04 11:46:1041856 本文將支持向量機(jī)(SVM)引入雷達(dá)故障預(yù)診斷,實(shí)現(xiàn)了雷達(dá)進(jìn)入潛伏性故障時(shí)就提前診斷。很好地解決雷達(dá)故障診斷流程復(fù)雜、診斷時(shí)間長(zhǎng)等問(wèn)題。這是由于SVM可以很好地解決小樣本、非線性分類(lèi)問(wèn)題,而這正是潛伏性雷達(dá)故障的特點(diǎn)。本文最后通過(guò)實(shí)例充分說(shuō)明了該算法在排除雷達(dá)潛伏性故障方面的能力。
2017-12-20 16:43:360 本文首先介紹了CAN總線的總體結(jié)構(gòu),其次介紹了汽車(chē)CAN總線數(shù)據(jù)傳輸系統(tǒng)構(gòu)成及工作原理,最后介紹了汽車(chē)CAN總線故障產(chǎn)生的原因以及用萬(wàn)用表測(cè)量診斷CAN總線方法詳解。
2018-04-25 08:54:18145063 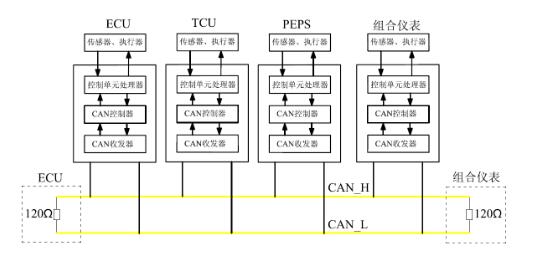
汽車(chē)CAN總線關(guān)閉故障發(fā)生時(shí),應(yīng)分析物理層包括CAN線路、CAN控制器及收發(fā)器、CAN信號(hào)干擾等外在因素,同時(shí)分析CAN寄存器及軟件處理,重新初始化CAN驅(qū)動(dòng)和恢復(fù)正常后,定時(shí)嘗試往外發(fā)送
2018-11-27 17:00:4938317 為了弄清CAN總線是否完好工作,必須觀察總線上的通信情況。在這種情況下不需要分析單個(gè)位,而只需要觀察CAN總線是否工作。示波器測(cè)量說(shuō)明: “CAN總線很可能無(wú)故障工作”。
2018-11-28 17:22:418746 設(shè)計(jì)一款基于2.4G射頻的車(chē)載CAN總線故障診斷儀,詳細(xì)介紹其工作原理及系統(tǒng)硬件電路,最后分別闡述接收端、發(fā)射端和PC端的軟件模塊。
2020-04-13 09:21:10994 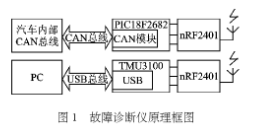
總線關(guān)閉是CAN節(jié)點(diǎn)比較重要的錯(cuò)誤處理機(jī)制。在總線關(guān)閉狀態(tài)下,CAN節(jié)點(diǎn)的恢復(fù)流程是怎樣的?如何理解節(jié)點(diǎn)恢復(fù)流程的“快恢復(fù)”和“慢恢復(fù)”機(jī)制?本文將為大家詳細(xì)分析總線關(guān)閉及恢復(fù)的機(jī)制和原理。
2020-06-09 16:30:144047 CAN總線的出現(xiàn)為分布式控制系統(tǒng)實(shí)現(xiàn)各節(jié)點(diǎn)之間實(shí)時(shí)、可靠的數(shù)據(jù)通信提供了強(qiáng)有力的技術(shù)支持,在帶來(lái)便利的同時(shí),也為工程師們故障排查增加了難度,所以本文主要給大家介紹了找到CAN總線(故障)節(jié)點(diǎn)的三種辦法。
2020-08-26 10:41:1011937 
西門(mén)子自動(dòng)化系統(tǒng)中Profibus DP總線的使用非常廣泛,在使用的過(guò)程中如何對(duì)正在運(yùn)行的總線設(shè)備進(jìn)行診斷,故障檢測(cè),是很有必要的事情,今天老鬼就把這些問(wèn)題做簡(jiǎn)要的總結(jié),希望學(xué)習(xí)完成后大家能夠完成
2020-10-19 15:56:293443 
本文所有測(cè)試與分析都是基于廣州致遠(yuǎn)電子股份有限公司生產(chǎn)的專(zhuān)業(yè)版CAN總線分析儀——CANScope-Pro。分析排查步驟與解決方案,為筆者數(shù)年CAN總線研發(fā)與現(xiàn)場(chǎng)支持的經(jīng)驗(yàn),按此步驟可以發(fā)現(xiàn)與解決CAN總線95%以上的問(wèn)題。
2021-04-19 09:21:360 很多的司機(jī)朋友以及工控圈的朋友都有聽(tīng)到過(guò)“CAN總線”一詞,今天我們就來(lái)一起看一下CAN總線為什么這么火? CAN總線,也叫做控制器局域網(wǎng)總線(Controller Area Network
2022-01-15 17:04:485782 CAN總線的應(yīng)用越來(lái)越廣泛,工程師在不同工況下,如何快速實(shí)現(xiàn)故障定位呢?本文將介紹CAN網(wǎng)絡(luò)故障帶來(lái)的麻煩,以及快速定位故障的幾種方法,可以幫您快速完成判斷并進(jìn)行選擇。
2022-03-10 09:09:473517 
LED顯示屏是由一塊一塊的顯示單元板所組成的,信號(hào)通過(guò)扁平電纜傳輸。LED顯示屏的故障處理與診斷流程如下。
2022-03-11 14:26:374507 在檢修過(guò)程中,首先應(yīng)查看具體的故障癥狀,根據(jù)故障癥狀和網(wǎng)絡(luò)結(jié)構(gòu)圖來(lái)初步分析有可能是哪些原因造成的,然后使用相關(guān)的診斷儀器進(jìn)行診斷,根據(jù)診斷結(jié)果制訂相關(guān)檢修方案,做到心中有數(shù),目標(biāo)明確。
2022-05-10 14:29:174288 CAN-BUS系統(tǒng)是汽車(chē)內(nèi)提供一種特殊的局域網(wǎng),為汽車(chē)的控制器之間提供數(shù)據(jù)交換,像常見(jiàn)的奧迪A6、奔馳、寶馬、帕薩特B5、寶來(lái)等車(chē)型都采用了CAN數(shù)據(jù)總線(簡(jiǎn)稱(chēng)CAN總線)。
2022-09-06 16:55:37864 撰寫(xiě)本文的主要目的是指導(dǎo) CAN 總線的研發(fā)與測(cè)試人員,排查 CAN 總線常見(jiàn)的故障,并 且提出相應(yīng)的解決方案,彌補(bǔ)國(guó)內(nèi)此類(lèi)文章的空白。由于篇幅有限,如果讀者還不熟悉 CAN 總 線原理,請(qǐng)先閱讀《項(xiàng)目驅(qū)動(dòng)——CAN-bus 現(xiàn)場(chǎng)總線基礎(chǔ)教程》。
2022-09-22 15:30:102 診斷接口的6號(hào)針腳連接CAN H 導(dǎo)線,14號(hào)針腳連接CAN L 導(dǎo)線。如果診斷接口上連接有兩組CAN總線,那么動(dòng)力CAN總線使用6號(hào)和14號(hào)針腳,舒適總線使用3號(hào)和11號(hào)針腳。診斷接口的針腳含義如下圖所示。
2022-12-05 10:23:002419 除了物理層線路因素,還有可能因?yàn)?b class="flag-6" style="color: red">CAN控制器或收發(fā)器等元器件故障導(dǎo)致。同時(shí),也有可能是由于CAN總線信號(hào)干擾導(dǎo)致的CAN信號(hào)收發(fā)不正確,嚴(yán)重時(shí)會(huì)導(dǎo)致不能正常發(fā)送報(bào)文,從而更容易導(dǎo)致CAN總線關(guān)閉。
2022-12-16 09:26:259862 汽車(chē)內(nèi)部掛有很多的ECU節(jié)點(diǎn),當(dāng)其中一個(gè)節(jié)點(diǎn)發(fā)生故障進(jìn)入總線關(guān)閉狀態(tài)時(shí),會(huì)很大程度上影響整車(chē)CAN網(wǎng)絡(luò)的通訊。
2023-01-04 11:34:427153 TSMaster自動(dòng)診斷流程TSMaster自動(dòng)診斷流程主要是針對(duì)整個(gè)項(xiàng)目的診斷流程進(jìn)行管理。本文主要講解流程應(yīng)用管理和配置診斷流程的相關(guān)配置操作。A流程用例管理TSMaster的自動(dòng)化診斷流程
2022-06-27 15:40:38706 
CAN網(wǎng)絡(luò)診斷的目的CAN總線學(xué)名控制器局域網(wǎng),本身就是為了控制汽車(chē)而開(kāi)發(fā)的。因?yàn)槠鋽?shù)據(jù)傳輸速度快抗干擾能力強(qiáng),目前已經(jīng)成為了最為主流的汽車(chē)總線。對(duì)于汽車(chē)來(lái)說(shuō),CAN總線就是它的神經(jīng)系統(tǒng)。這個(gè)系統(tǒng)
2022-12-06 09:29:45702 
CAN總線憑借著可靠、實(shí)時(shí)、經(jīng)濟(jì)和靈活的優(yōu)勢(shì),在汽車(chē)、工業(yè)等領(lǐng)域得到廣泛應(yīng)用,并逐漸普及到電池儲(chǔ)能、醫(yī)療器械、智能大樓等應(yīng)用場(chǎng)景中。隨著CAN總線在越來(lái)越多領(lǐng)域得到應(yīng)用,CAN總線測(cè)試的需求也逐漸
2023-05-19 09:55:473857 
Can-Bus總線技術(shù)是“控制器局域網(wǎng)總線技術(shù)(Controller Area Network-BUS)”的簡(jiǎn)稱(chēng),它具有極強(qiáng)的抗干擾和糾錯(cuò)能力,最早被用于飛機(jī)、坦克等武器電子系統(tǒng)的通訊聯(lián)絡(luò)上。
2023-07-26 15:54:362084 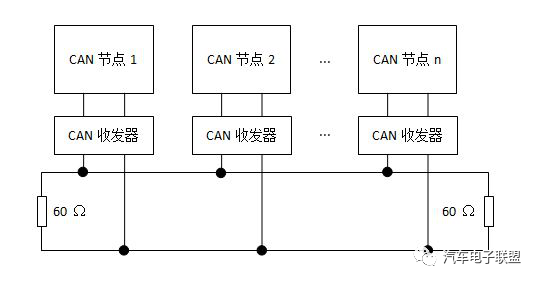
目前國(guó)內(nèi)商用汽車(chē)普遍采用J1939通信協(xié)議構(gòu)架CAN通信網(wǎng)絡(luò)。CAN總線發(fā)生故障時(shí),如何高效地查找故障原因,一直是困擾維修工一大難題。本文以歐曼GTL超能版重卡為例,就CAN線開(kāi)路和短路故障給出了排查方案,相信會(huì)對(duì)廣大維修工有所幫助。歐曼GTL超能版重卡CAN網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)如下圖所示。
2023-08-04 17:01:482748 
今日跟大家分享參加野火【瑞薩RA MCU創(chuàng)意氛圍賽】選手的項(xiàng)目——基于CAN總線的UDS診斷Bootloader升級(jí)MCU工具。
2023-08-21 14:01:49919 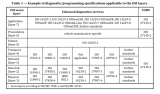
CAN總線的應(yīng)用越來(lái)越廣泛,工程師在各種不同工況下,如何選擇最合適的網(wǎng)絡(luò)拓?fù)浞绞侥兀勘酒恼聦⒔榻B主流的幾種總線拓?fù)浞绞剑约叭绾谓鉀QCAN總線故障。
2023-08-28 14:57:58234 當(dāng)CAN總線出現(xiàn)故障或數(shù)據(jù)傳輸異常時(shí),往往會(huì)出現(xiàn)多種奇怪的故障現(xiàn)象,如儀表板顯示異常,車(chē)輛無(wú)法啟動(dòng),啟動(dòng)后無(wú)法熄滅,車(chē)輛動(dòng)力性能下降,某些電控系統(tǒng)功能失等。
2023-08-29 10:06:15823 
? Ixxat USB-to-CAN 適配器通過(guò)橋接基于 CAN 的現(xiàn)場(chǎng)總線系統(tǒng)和帶有 USB 接口的計(jì)算機(jī)輕松實(shí)現(xiàn)數(shù)據(jù)集成。它不僅能簡(jiǎn)化日常控制流程、調(diào)試、診斷和維護(hù)工作,還能提高工作效率和操作
2023-09-08 11:12:50512 1、CAN總線的常見(jiàn)故障 CAN總線錯(cuò)誤分析與解決 當(dāng)CAN總線出現(xiàn)故障或數(shù)據(jù)傳輸異常時(shí),往往會(huì)出現(xiàn)多種奇怪的故障現(xiàn)象,如儀表板顯示異常,車(chē)輛無(wú)法啟動(dòng),啟動(dòng)后無(wú)法熄滅,車(chē)輛動(dòng)力性能下降,某些電控系統(tǒng)
2023-09-14 16:30:071595 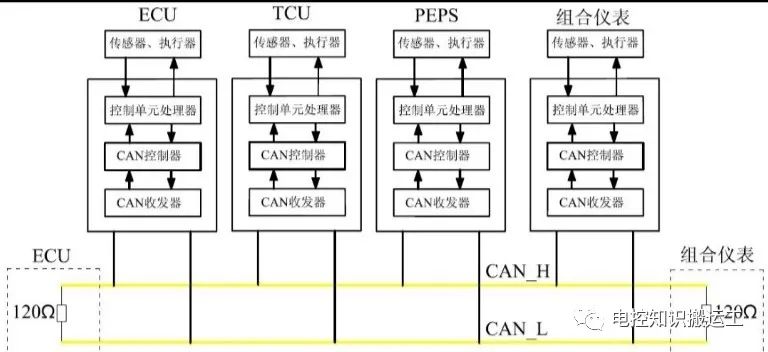
CAN H與 CAN L短路 當(dāng)CAN H 與CAN L 短路時(shí),CAN網(wǎng)絡(luò)會(huì)關(guān)閉,無(wú)法再進(jìn)行通信。會(huì)有相應(yīng)的網(wǎng)絡(luò)故障碼。CAN H 與CAN L短路的總線波形如下圖所示。 當(dāng)兩者相互短路之后
2023-09-14 16:34:351787 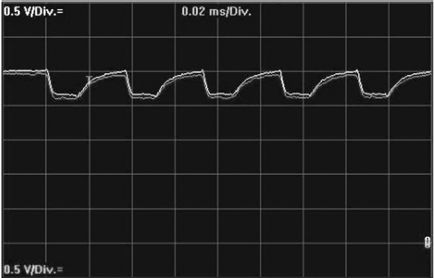
CAN H對(duì)地短路 當(dāng)出現(xiàn)CAN H 對(duì)地短路這種故障時(shí),根據(jù)CAN總線的容錯(cuò)特性,可能出現(xiàn)整個(gè)CAN網(wǎng)絡(luò)無(wú)法通信的情況或產(chǎn)生相關(guān)故障碼。 CAN H 的電壓位于0V,CAN L 電壓也位于0V
2023-09-14 16:47:01992 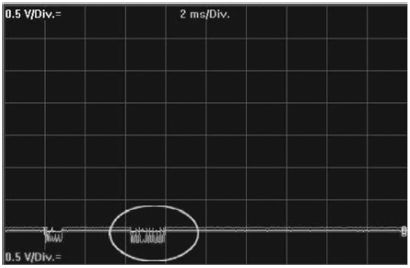
當(dāng)出現(xiàn)CAN L 對(duì)地短路這種故障時(shí),根據(jù)CAN總線的容錯(cuò)特性,可能出現(xiàn)整個(gè)CAN網(wǎng)絡(luò)無(wú)法通信的情況或產(chǎn)生相關(guān)故障碼。 但是對(duì)于某些車(chē)系,如海馬車(chē)系,其CAN L對(duì)地短路的容錯(cuò)特性較好,車(chē)輛基本能
2023-09-14 16:51:491267 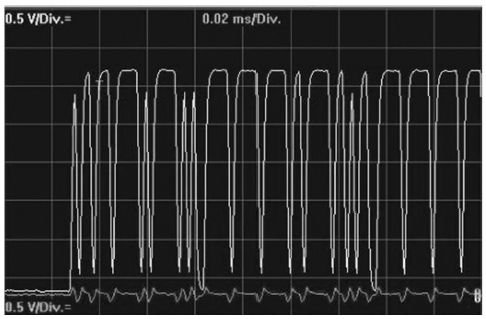
CAN L對(duì)帶電源(正極)短路 當(dāng)出現(xiàn)CAN L 對(duì)電源(正極)短路這種故障時(shí),根據(jù)CAN總線的容錯(cuò)特性,可能出現(xiàn)整個(gè)CAN網(wǎng)絡(luò)無(wú)法通信的情況或產(chǎn)生相關(guān)故障碼。 由于CAN L 對(duì)電源短路,因此
2023-09-14 16:57:081113 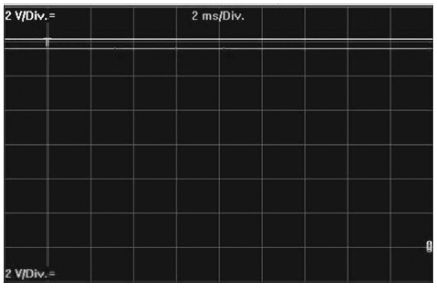
怎么用示波器看can總線信號(hào)?? CAN總線是一種高速、可靠的控制器局域網(wǎng)絡(luò),常被用于汽車(chē)、航空等領(lǐng)域。在調(diào)試和故障排查時(shí),我們可以使用示波器來(lái)監(jiān)測(cè)CAN總線的信號(hào)。以下是如何使用示波器來(lái)看CAN
2023-10-11 17:19:303258 在總線測(cè)試的過(guò)程中,總會(huì)遇到各種各樣的問(wèn)題,本文主要總結(jié)了平時(shí)測(cè)試過(guò)程中經(jīng)常遇到的一些典型問(wèn)題,并給出解決方案。如果總線出現(xiàn)故障,大致可以按照文檔中的標(biāo)題順序來(lái)檢查。
2021-11-10 15:49:5415 虹科PCAN-DiagFD是一款用于CAN總線通信診斷的手持式診斷工具。可以基于協(xié)議層診斷CAN2.0和CANFD報(bào)文,也可以利用示波器功能和測(cè)量功能實(shí)現(xiàn)物理層測(cè)試。示波器功能用于CAN總線上的信號(hào)
2021-11-10 15:56:327 PCAN-MiniDiagFD是一款用于CAN和CANFD總線基本診斷的手持式診斷儀,它易于攜帶、成本低廉。工程師和開(kāi)發(fā)者們可以輕易地用它接入汽車(chē)、機(jī)械或者工業(yè)設(shè)備的總線網(wǎng)絡(luò)。對(duì)于不清楚總線配置
2021-11-11 09:33:500 CAN總線舵機(jī)的特性、控制方法以及常見(jiàn)故障
2023-10-21 09:53:050 CAN總線數(shù)據(jù)采集器主要用于以下幾類(lèi)用戶(hù): (1)汽車(chē)制造商和供應(yīng)商:汽車(chē)制造商和供應(yīng)商使用CAN總線數(shù)據(jù)采集器來(lái)進(jìn)行汽車(chē)的開(kāi)發(fā)、測(cè)試和故障診斷。它們可以使用采集器來(lái)讀取和記錄汽車(chē)的CAN總線數(shù)據(jù)
2023-11-29 08:45:02207 高速CAN總線和低速CAN總線的特性 高速CAN總線和低速CAN總線是兩種常見(jiàn)的CAN總線類(lèi)型。它們?cè)跀?shù)據(jù)傳輸速率、最大電纜長(zhǎng)度、適用場(chǎng)景等方面存在一些差異。下面將詳盡、詳實(shí)、細(xì)致地介紹這兩種CAN
2024-01-31 14:09:01497 找到CAN總線(故障)節(jié)點(diǎn)的三種辦法? CAN總線是現(xiàn)代汽車(chē)電子系統(tǒng)中常見(jiàn)的通信協(xié)議,用于車(chē)載電子設(shè)備之間的數(shù)據(jù)傳輸。在汽車(chē)的CAN總線系統(tǒng)中,每個(gè)節(jié)點(diǎn)都扮演著重要的角色。然而,由于各種原因,有時(shí)候
2024-02-02 10:35:10457 CAN總線系統(tǒng)故障診斷的步驟、方法、注意事項(xiàng)? CAN總線系統(tǒng)故障診斷是指對(duì)CAN總線系統(tǒng)中出現(xiàn)的故障進(jìn)行分析、定位和排除的過(guò)程。本文將以詳盡、詳實(shí)和細(xì)致的方式介紹CAN總線系統(tǒng)故障診斷的步驟、方法
2024-02-03 11:31:191116
 電子發(fā)燒友App
電子發(fā)燒友App













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論