 電子發(fā)燒友App
電子發(fā)燒友App


近年來,基于Internet的網(wǎng)絡(luò)化控制系統(tǒng)已成為國內(nèi)外測控領(lǐng)域研究的熱點,在石油勘探開發(fā)、鋼鐵化工等領(lǐng)域有著廣闊的應(yīng)用前景。而控制器的設(shè)計和研發(fā)是整個網(wǎng)絡(luò)控制系統(tǒng)的關(guān)鍵和核心。在一些地域高度分散以及環(huán)境惡劣的控制現(xiàn)場,使用嵌入式系統(tǒng)作為控制器節(jié)點,可更有利于多點分布式綜合布控及并行處理,實現(xiàn)更好的測控效果。然而由于網(wǎng)絡(luò)傳輸本身的特點,網(wǎng)絡(luò)時延會不可避免地影響網(wǎng)絡(luò)控制系統(tǒng)的控制性能和穩(wěn)定性,因此本文提出基于S3C2440A及嵌入式Linux的GPC(Generalized PredictiveControl)控制器的設(shè)計方案,具有一定的通用性。
1 控制器硬件平臺設(shè)計
控制器節(jié)點是嵌入式網(wǎng)絡(luò)化測控系統(tǒng)的中心。在測控系統(tǒng)中,主控制器承擔(dān)著控制算法的實現(xiàn)和數(shù)據(jù)采集兩大任務(wù),這要求控制器節(jié)點的硬件平臺有更強(qiáng)的計算能力,以及更好的網(wǎng)絡(luò)性能。本文中控制器的硬件平臺采用三星公司的S3C2440,外圍設(shè)備主要有RAM、Flash等。控制器的硬件平臺結(jié)構(gòu)如圖1所示。
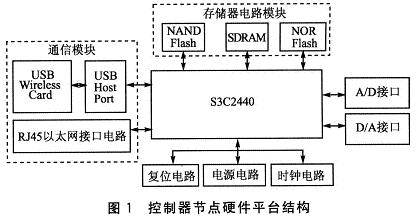
(1)S3C2440處理器簡介
本系統(tǒng)采用三星公司的16/32位RISC微處理器S3C2440AL作為控制器核心。S3C2440AL的一大特點是其核心處理器(CPU)采用16/32位ARM920T的RISC微處理器。ARM920T實現(xiàn)了MMU、AMBA BUS和Har-vard高速緩沖體系結(jié)構(gòu)。系統(tǒng)資源和外圍接口豐富,包括電源管理器、外部存儲器控制器、4通道DMA、3通道UART、8路10位ADC和GPIO等。
(2)外圍電路簡介
控制器外圍電路主要由存儲器電路模塊、通信模塊以及JTAG調(diào)試電路等構(gòu)成。其中存儲器電路模塊采用2片HY57V561620FTP芯片作為外擴(kuò)SDRAM;采用1片SST39VF1601(2 MB)芯片作為NOR Flash,用于存放bootloader程序;采用1片K9F1208芯片(64 MB)作為NAND Flash,用于存放操作系統(tǒng)以及文件系統(tǒng)。在通信模塊中采用DM9000網(wǎng)卡芯片和網(wǎng)絡(luò)變壓器HR911103A,以實現(xiàn)以太網(wǎng)接口的設(shè)計;同時設(shè)計了USBhost接口電路,為下一步實現(xiàn)WLAN通信提供接口。A/D和D/A接口電路實現(xiàn)數(shù)據(jù)的采集和控制信號的發(fā)出。
2 控制器軟件平臺設(shè)計
2.1 軟件平臺整體結(jié)構(gòu)
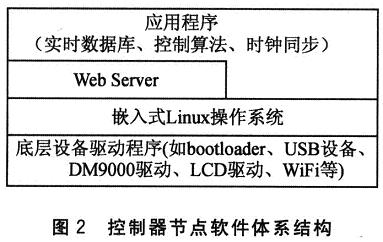
控制器節(jié)點軟件體系結(jié)構(gòu)如圖2所示。其中最底層為設(shè)備驅(qū)動程序?qū)樱饕M(jìn)行處理器初始化和驅(qū)動各外設(shè)電路模塊;第2層為嵌入式Linux操作系統(tǒng),主要管理系統(tǒng)的軟硬件資源、上層應(yīng)用,以及操作底層驅(qū)動接口;第3層為Web服務(wù)器,以實現(xiàn)控制器的:Browser/Server訪問控制;第4層為應(yīng)用程序,主要包括實時數(shù)據(jù)庫、GPC控制算法和時鐘同步應(yīng)用程序。
2.2 bootloader的配置和編譯
首先在宿主機(jī)的Linux下建立arm-linux-gcc-2.95.3交叉編譯環(huán)境,將vivi.tgz解壓縮到Linux的相應(yīng)目錄下,進(jìn)入vivi目錄,執(zhí)行make menuconfig命令進(jìn)入vivi配置界面,對vivi的參數(shù)進(jìn)行配置。完成配置之后,進(jìn)行編譯,此時已經(jīng)在當(dāng)前目錄下生成了vivi。可使用H-JTAG將vivi燒寫到NAND Flash運(yùn)行。
2.3 Linux的移植
(1)編譯Linux內(nèi)核
首先在宿主機(jī)的Linux下建立arm-linux-gcc-3.4.1交叉編譯環(huán)境,然后將Liunx-2.6.13.tgz解壓縮到Linux的某一目錄下,執(zhí)行make menuconfig命令進(jìn)入內(nèi)核配置界面,定制Linux內(nèi)核,包括配置CPU選項、網(wǎng)卡聲卡驅(qū)動、串口、對yaffs文件系統(tǒng)的支持等選項。完成定制之后,保存設(shè)置退出。然后對內(nèi)核進(jìn)行編譯,即可生成內(nèi)核映像文件zImage。
(2)制作yaffs文件系統(tǒng)
制作yaffs文件系統(tǒng)映像需要使用mkyaffsimage工具程序。首先將其解壓縮到/usr/sbin目錄下,然后將文件系統(tǒng)解壓縮到Linux某一目錄下,此時用戶可以將自己編寫的應(yīng)用程序或其他文件添加到文件系統(tǒng)中。添加完畢后使用mkyaffsimage命令即可得到root.img鏡像文件。最后可使用H-JTAG將生成的映像文件燒寫到NAND Flash運(yùn)行。
2.4 Boa服務(wù)器的移植和構(gòu)建
在網(wǎng)絡(luò)化測控系統(tǒng)中,每個測控節(jié)點都需要使用Web瀏覽器進(jìn)行監(jiān)控和數(shù)據(jù)交互。Web服務(wù)器作為一個數(shù)據(jù)載體,可以將本地的信息和數(shù)據(jù)通過網(wǎng)絡(luò)傳遞給遠(yuǎn)端發(fā)出請求的客戶,這對遠(yuǎn)程網(wǎng)絡(luò)化監(jiān)控的實現(xiàn)有重要意義。因此Web Server的移植成為一項必不可少的工作。Boa的優(yōu)點在于其源代碼開放、性能好和可靠性高。本文中Web Server的構(gòu)建也是基于Boa展開的。
首先在官方網(wǎng)站上下載Boa的源碼boa-0.94.13.tar.gz,解壓縮到Linxu宿主機(jī)的某一目錄下,然后進(jìn)入src目錄,執(zhí)行./congfig命令,生成Makefile.in文件。由于生成的Makefile文件是針對X86平臺的,為了生成能夠在ARM上運(yùn)行的Boa,需要修改Makefile文件。找到CC=gcc,CPP=gcc-E這兩行,并修改為CC=arm-linux-gcc,CPP=arm-linux-gcc-E;然后使用make命令進(jìn)行編譯,編譯成功后會在src目錄下生成1個可運(yùn)行在ARM平臺下的Boa可執(zhí)行文件,然后將編譯好的Boa程序放入,/sbin目錄下。
在目標(biāo)板上運(yùn)行Boa之前,還需要對boa.conf文件進(jìn)行配置。boa.conf文件主要包含的boa基本參數(shù):Port,boa服務(wù)器監(jiān)聽的端口;User,連接到服務(wù)器的客戶端的身份;DocumentRoot,HTML文件的根目錄。用戶可以根據(jù)自己的需要進(jìn)行設(shè)置,設(shè)置完畢后進(jìn)入sbin目錄,直接運(yùn)行Boa就可以直接啟動Web服務(wù)器。
3 GPC算法的設(shè)計與實現(xiàn)
廣義預(yù)測控制算法是Clarke等人于1987年提出的。該算法在保留了DMC、MAC等算法中多步預(yù)測優(yōu)化策略的基礎(chǔ)上,同時借鑒了最小方差自校正控制中的模型預(yù)測、最小方差控制、在線辨識的思想。因此對模型精度要求低,對變時滯的對象具有較強(qiáng)的魯棒性,近年來得到了廣泛的應(yīng)用和重視。本文采用GPC算法解決時延問題。
3.1 GPC算法
在GPC中,采用最小方差控制中使用的受控自回歸積分滑動平均模型(CARIMA)來描述被控對像,即
![]()
式中z-1是后移算子,表示后退1個采樣周期的相應(yīng)量;A(z-1),B(z-1),C(z-1)為后移算子z-1的多項式。y(k)為系統(tǒng)輸出,u(k)為控制輸出。ξ(t)是均值為0、方差為0的白噪聲序列,表示一類隨機(jī)噪聲的影響。△為差分算子,且△=1-z-1。一般,令C(z-1)=1。為了便于研究,在不影響系統(tǒng)算法研究的前提下,令系統(tǒng)為SISO系統(tǒng)。GPC算法的目標(biāo)函數(shù)中引入了控制增量加權(quán)參數(shù),以增強(qiáng)系統(tǒng)的魯棒性。其目標(biāo)函數(shù)為
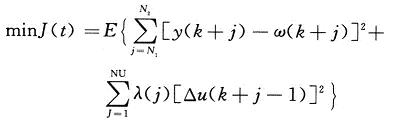
其中,E為數(shù)學(xué)期望;ω(k十i)為輸人參考軌跡,N1、N2分別為優(yōu)化時域的初始值和終值,NU為控制時域,λ(j)為大于零的控制增量加權(quán)系數(shù)。廣義預(yù)測控制算法問題最終歸結(jié)為:通過遞推求解Diophanfine方程,求出最優(yōu)控制增量△U,使目標(biāo)函數(shù)達(dá)到最小值。
3.2 MatIab仿真及生成目標(biāo)代碼
RTW是Matlab提供的代碼自動生成工具,可使Simulink模型自動生成面向不同目標(biāo)的代碼。目前通過Matlab/RTW可生成在PC、ARM等設(shè)備上運(yùn)行的代碼,以及在Windows、Linux等系統(tǒng)上運(yùn)行的可執(zhí)行文件。利用RTW自動生成代碼,可使工程師專注于系統(tǒng)設(shè)計和實現(xiàn),減輕編程工作量,加快產(chǎn)品研發(fā)的速度。GPC算法的仿真和調(diào)試是在Matlab7.0環(huán)境下,利用MPC工具箱,編制了相應(yīng)程序而實現(xiàn)。由于Matlab中,m語言無法直接移植到嵌入式控制器中,因此先要用simulink構(gòu)建系統(tǒng)模型,然后再用Real-Time Workshop自動生成面向ARM平臺的C代碼。
利用RTW自動生成代碼的實驗步驟如下:
①用Matlab的m語言編寫GPC算法程序,仿真通過后,封裝成Simulink仿真框圖,并建立GPC控制系統(tǒng)模型Model.mdl。
②在Simulink窗口中,選擇Simulink|Configuration Parameters選項,對solvet option、Data Import/Export等進(jìn)行設(shè)置。
③選中Generate code only復(fù)選框,單擊build,代碼自動生成。
④整合底層驅(qū)動函數(shù)、用戶定義的函數(shù)以及自動生成的GPC程序,編譯生成目標(biāo)文件。
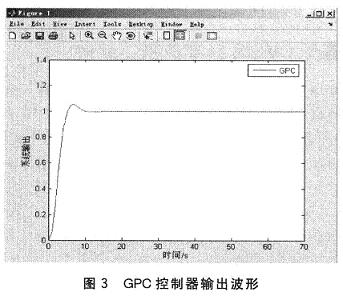
從圖3可以看出,在伴有隨機(jī)擾動的二價系統(tǒng)中,基于GPC算法的控制器的超調(diào)量和調(diào)節(jié)時間都比較小,且上升時間快,表現(xiàn)出良好的動態(tài)性能和魯棒性。這和GPC算法多步預(yù)測、滾動優(yōu)化的特點是分不開的。
結(jié) 語
本文成功構(gòu)建了網(wǎng)絡(luò)化控制器節(jié)點的軟硬件平臺,并通過Matlab/RTW半實物仿真的方法,實現(xiàn)了GPC算法的快速移植,對網(wǎng)絡(luò)延遲進(jìn)行了補(bǔ)償。該測控平臺應(yīng)用范圍相當(dāng)廣泛,適用于基于Ethernet的嵌入式Web控制器,滿足遠(yuǎn)程實時控制需求,具有一定的應(yīng)用前景。










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論