提高現(xiàn)代化工廠部門之間物料搬運(yùn)和內(nèi)部運(yùn)輸的協(xié)調(diào)性,是實(shí)現(xiàn)生產(chǎn)全盤自動(dòng)化的重要舉措。傳統(tǒng)物料運(yùn)輸車具有設(shè)備復(fù)雜、功耗大、投資高、污染環(huán)境等缺點(diǎn),其中有軌運(yùn)輸車需鋪設(shè)專門軌道,若生產(chǎn)程序改變,需重新鋪設(shè)軌道,破壞路面,投資高;無(wú)軌運(yùn)輸車包括叉車及手推運(yùn)料小車,均需專人駕駛,勞動(dòng)強(qiáng)度大,運(yùn)輸效率低。
2015-08-10 15:50:42 4404
4404 作者:Alix Paultre, Embedded Computing Design在工廠自動(dòng)化、倉(cāng)庫(kù)配貨以及其他物料運(yùn)輸環(huán)境中正在采用自動(dòng)導(dǎo)引車 (AGV),因?yàn)樗鼈兡軌蛱岣咝剩瑤椭鷾p少工傷
2019-07-16 07:14:48
目的 本文介紹自動(dòng)導(dǎo)引車(AGV)車載控制系統(tǒng)的實(shí)現(xiàn)過程,分為硬件搭建和軟件設(shè)計(jì)兩部分,并在其中穿插 AGV 控制的基礎(chǔ)知識(shí)講解。 1. 車載控制器1.1 控制器的類型 車載控制器是控制系統(tǒng)
2021-09-07 08:16:43
。木板高度、障礙物高度均為30cm,停車場(chǎng)如圖所示。 二、要求1. 基本要求(1)電動(dòng)車尺(含加在車體上的其他裝置)要求如下:0.2m
2014-07-19 23:40:43
、可預(yù)測(cè)性調(diào)度能力:AGV在行駛路徑上遇到障礙物會(huì)自動(dòng)停車或允許最大限度地更改路徑規(guī)化,而人為駕駛的車輛卻未必。★邊緣計(jì)算,實(shí)現(xiàn)預(yù)測(cè)性運(yùn)維:物通博聯(lián)AGV系統(tǒng)具備邊緣計(jì)算能力,通過應(yīng)用的本地部署,實(shí)現(xiàn)
2022-09-05 19:29:43
AGV全稱(Automatecl Guided Vehicles),是一種裝有自動(dòng)導(dǎo)引裝置,能夠沿規(guī)定的路徑行駛,具有編程和停車選擇裝置、安全保護(hù)裝置以及各種物料移載功能的自動(dòng)導(dǎo)航車。近幾年隨著物流
2020-08-11 06:15:07
控制系統(tǒng)2.AGV安全系統(tǒng)3.激光導(dǎo)航控制系統(tǒng)三、AGV的調(diào)度系統(tǒng)1.系統(tǒng)架構(gòu)2.軟件架構(gòu)3.系統(tǒng)功能4.系統(tǒng)應(yīng)用方向——智能倉(cāng)儲(chǔ)五、AGV充電系統(tǒng)一、AGV的基本概念A(yù)GV是自動(dòng)導(dǎo)引運(yùn)輸車
2021-09-14 08:23:48
ANYmal機(jī)器人的實(shí)驗(yàn)版本具有腿和腳,蘇黎世聯(lián)邦理工學(xué)院步行,有腿的機(jī)器人可能擅長(zhǎng)于越過障礙物,但車輪在光滑地面上行駛?cè)匀桓行省_@就是蘇黎世聯(lián)邦理工學(xué)院的工程師向其現(xiàn)有的ANYmal四足機(jī)器人
2021-08-30 08:02:03
的遙控車最主要的區(qū)別就是智能化,它可以不需要我們?nèi)ゲ倏兀约壕湍苄凶摺M瑫r(shí)它還會(huì)實(shí)時(shí)檢測(cè)前方是否有障礙物,思考自己是否要前進(jìn)或者轉(zhuǎn)彎。聽到這里,是不是已經(jīng)躍躍欲試了呢。話不多說,動(dòng)起手來(lái)吧! 所需器材
2018-03-14 10:09:38
`深圳市八達(dá)威科技有限公司由一批多年從事散熱產(chǎn)品研發(fā)、生產(chǎn)和銷售人員發(fā)起成立,致力于向客戶提供優(yōu)秀的散熱產(chǎn)品及散熱方案。公司所代理的日本電產(chǎn)(NIDEC)散熱風(fēng)扇系列產(chǎn)品便是散熱產(chǎn)品中的精品
2017-04-21 13:42:51
運(yùn)行。 步驟3:接下來(lái)就需要完成檢測(cè)障礙物的功能,這部分需要超聲波模塊來(lái)實(shí)現(xiàn)。我們需要在死循環(huán)內(nèi)添加障礙物檢測(cè)的內(nèi)容,讓避障車一直不斷的檢測(cè)與前方障礙物的距離。 步驟4:為了更簡(jiǎn)單、方便、快捷的實(shí)現(xiàn)功能
2018-09-08 10:00:10
一車一鎖運(yùn)輸車輛管理鎖具在車廂門、貨柜箱門處,出倉(cāng)上車,到站下貨,權(quán)限分明。可用產(chǎn)品:智能行業(yè)安全掛鎖、智能施封鎖依據(jù)運(yùn)輸車輛(含箱式貨車、集裝箱運(yùn)輸)分為兩種使用場(chǎng)景:1.箱式貨車具有獨(dú)立的封閉
2020-05-09 11:38:40
測(cè)前方的障礙物,加上自己的一個(gè)步進(jìn)電機(jī)(加步進(jìn)點(diǎn)擊是為了多向測(cè)試障礙物,正前方的,左前方,右前方,三個(gè)方向的障礙物的距離,做出最合理的判斷)左右旋轉(zhuǎn)測(cè)量障礙物的距離,做出最合理的判斷,然后通過電機(jī)驅(qū)動(dòng)模塊驅(qū)動(dòng)電機(jī)往哪個(gè)方向走。最后走出自己設(shè)計(jì)的迷宮。
2015-10-29 14:14:41
前言: 上次直播觀看了視頻,有智能運(yùn)輸車的整個(gè)過程教學(xué),此篇就智能運(yùn)輸車控制邏輯和實(shí)現(xiàn)進(jìn)行,中間出現(xiàn)電機(jī)控制不對(duì),需要自己進(jìn)行測(cè)試。一、智能運(yùn)輸車拼裝智能運(yùn)輸車在上次直播中有講解,加上馬老師提供
2022-11-04 09:11:13
我想做一個(gè)卷閘門下行過程中的障礙物探測(cè)器,就是在下行的過程中如果探測(cè)到門下面有障礙物的存在則停止下行,現(xiàn)在沒有思路。各位大俠給個(gè)思路,怎么樣來(lái)實(shí)現(xiàn)、需要具體哪些設(shè)備來(lái)完成這個(gè)功能。
2013-08-24 09:51:02
我想做一個(gè)卷閘門下行過程中的障礙物探測(cè)器,就是在下行的過程中如果探測(cè)到門下面有障礙物的存在則停止下行,現(xiàn)在沒有思路。各位大俠給個(gè)思路,怎么樣來(lái)實(shí)現(xiàn)、需要具體哪些設(shè)備來(lái)完成這個(gè)功能。
2013-08-24 09:55:41
攝像機(jī)采集的圖像得出障礙物深度信息后,將小車離障礙物的距離信息傳給ARM以實(shí)現(xiàn)無(wú)人車在自主導(dǎo)航過程中實(shí)現(xiàn)避障功能,請(qǐng)問這樣可以實(shí)現(xiàn)嗎?
2017-03-18 13:19:01
本帖最后由 zeng10119 于 2017-3-21 12:01 編輯
有懂避障這方面的嗎?繞過障礙物的程序思路怎么寫?找了好多自動(dòng)壁障車資料,都是無(wú)腦避障,要么是遇到障礙物左轉(zhuǎn)或右轉(zhuǎn),要么是遇到障礙物180°轉(zhuǎn)彎。算法思路怎么搞?
2017-03-21 10:57:54
制作所也慢慢退出一般被動(dòng)型元件市場(chǎng),將產(chǎn)品加速轉(zhuǎn)移到車用電子市場(chǎng)。數(shù)據(jù)顯示,全球的積層陶瓷電容器主要廠包括日本村田制作所,韓國(guó)的SEMCO、太陽(yáng)誘電、TDK等,其市占率分別為40%、21%、12%和8
2018-10-22 15:47:54
自動(dòng)尋跡,測(cè)量路程,檢測(cè)金屬,躲避障礙物等多種任務(wù)。設(shè)計(jì)的小車具有結(jié)構(gòu)簡(jiǎn)單、功能齊全、實(shí)現(xiàn)容易等優(yōu)點(diǎn),其設(shè)計(jì)的思路和方法也可應(yīng)用于無(wú)人駕駛機(jī)動(dòng)車、智能倉(cāng)庫(kù)等領(lǐng)域,具有較強(qiáng)的實(shí)用價(jià)值。{:4_116
2014-10-31 14:49:21
代碼的話如下所示,寫有沒有障礙物直走的功能,但是實(shí)際上沒有實(shí)現(xiàn),求大神解決下新手的問題void avoidrun(void){ SR_2 = AVOID_RIGHT_IO; SL_2
2018-12-23 14:23:04
通過攝像頭對(duì)周圍環(huán)境信息的實(shí)時(shí)采集,如果當(dāng)鏡頭前方出現(xiàn)障礙物時(shí)候,以一定的方式(聲音或振動(dòng)之類的)反饋出來(lái)。主要考慮的是實(shí)現(xiàn)盲人室內(nèi)導(dǎo)盲作用,不需要太過于考慮實(shí)際使用,只要能實(shí)現(xiàn)判定到障礙物,自動(dòng)提醒就行啦。怎么判定前方出現(xiàn)障礙物,一直困擾著我。求大神指?jìng)€(gè)思路,能有程序框圖就更好了
2017-03-14 07:58:55
狀態(tài)(紅黃綠燈顯示)超聲波測(cè)量當(dāng)前與障礙物距離具有TTS語(yǔ)音播報(bào)功能標(biāo)簽:51單片機(jī)、LCD1602、TTS語(yǔ)音播報(bào)、超聲波模塊老年車自動(dòng)跟車-實(shí)物設(shè)計(jì) - 電子校園編號(hào): CP-51-2021-031-SW 仿真鏈接: 老年車自動(dòng)跟車-仿真設(shè)計(jì) 軟件安裝: Proteus8.9
2021-11-19 06:54:55
我想要做一個(gè)道路障礙物檢測(cè)系統(tǒng)。就是在路面上安一個(gè)檢測(cè)器,一旦有障礙物擋住,且在路上停留一段時(shí)間,就發(fā)射信號(hào)報(bào)警,使二極管發(fā)光。現(xiàn)在我想請(qǐng)教一下是不是檢測(cè)用紅外線好一點(diǎn),延時(shí)用單片機(jī)程序大概要怎么寫?電路什么的怎么連啊?求大神解答
2015-03-10 13:33:26
簡(jiǎn)介:本設(shè)計(jì)是基于單片機(jī)的避障小車及自動(dòng)循跡的設(shè)計(jì),主要實(shí)現(xiàn)以下功能:可實(shí)現(xiàn)通過超聲波距離傳感器測(cè)得障礙物距離可實(shí)現(xiàn)通過紅外對(duì)管自動(dòng)循跡可實(shí)現(xiàn)通過溫度傳感器測(cè)得車內(nèi)溫度可實(shí)現(xiàn)自動(dòng)避障、自動(dòng)循跡等功能可實(shí)現(xiàn)通過LCD1602顯示當(dāng)前檢測(cè)到的障礙物距離、車內(nèi)溫度數(shù)值以及左右偏差值...
2022-02-25 07:01:35
傳感器測(cè)量智能車車速,使用紅外光對(duì)管進(jìn)行障礙物檢測(cè), TFT LCD 彩屏模擬汽車的儀表盤,并顯示智能車的各項(xiàng)數(shù)據(jù),如駕駛模式、 行駛距離、車速等。使用紅外遙控器對(duì)智能車進(jìn)行操控,并且控制多種模式的自由切換。
2019-02-28 20:07:06
利用紅外對(duì)管檢測(cè)黑線與障礙物,并以STC89C52單片機(jī)為控制芯片控制電動(dòng)小汽車的轉(zhuǎn)向,從而實(shí)現(xiàn)自動(dòng)循跡避障的功能。
2021-09-23 06:28:39
安全隱患的作用。智能避障導(dǎo)盲拐杖設(shè)計(jì)主要功能:1、 當(dāng)三米處有障礙物時(shí)發(fā)出“滴,滴,滴”的報(bào)警聲(蜂鳴器),隨著距離障礙物越來(lái)越近“滴滴”聲的頻率越高(和汽車倒車提示有點(diǎn)像),當(dāng)快要碰撞到時(shí),連續(xù)“滴。。。。”聲。2、 天黑的時(shí)候,LED燈(白色高亮度,可直接使用拐杖上的)自動(dòng)點(diǎn)亮,晚上當(dāng)三米外有障礙物時(shí)
2021-11-19 08:34:37
自動(dòng)避開障礙物繼續(xù)前進(jìn)。3.語(yǔ)音播報(bào)(JQ8400)播報(bào)指定的語(yǔ)音,達(dá)到人機(jī)交互與娛樂。4.WIFI模塊實(shí)時(shí)顯示小車的當(dāng)前的運(yùn)行狀態(tài)。4.整體架構(gòu)通過超聲波車距和...
2021-11-08 08:00:20
的問題是,不能按照我的指令完成避障。數(shù)碼管和按鍵和pwm功能基本都實(shí)現(xiàn)了,但是遇到障礙物時(shí),小車倒退一小會(huì)接著就不走了,希望大神點(diǎn)撥一下,謝謝了。下面是主程序和pwm的程序。#include //包含
2020-04-19 22:50:58
本設(shè)計(jì)采用AT89C52為主要控制芯片的智能車,HC-SR04為超聲波測(cè)距傳感器。該汽車避障系統(tǒng)擁有自動(dòng)聲光報(bào)警、超聲波測(cè)距,自動(dòng)避開障礙物等功能。當(dāng)汽車與障礙物之間的距離小于安全距離35cm
2022-01-05 08:30:17
我正在設(shè)計(jì)一個(gè)也能避開各種障礙物(兩個(gè)數(shù)字紅外 (IR) 傳感器)的巡線機(jī)器人,但由于我是電子學(xué)初學(xué)者,所以我對(duì)我的原理圖有點(diǎn)困惑,這就是為什么我想知道是否我的原理圖是正確的,如果它能工作的話
2022-12-07 07:49:08
我和隊(duì)友想做一個(gè)反恐偵察車,主要功能就是在小車前面放一個(gè)紅外攝像頭,遠(yuǎn)程監(jiān)控,將小車放置到一個(gè)陌生的環(huán)境,比如黑暗的***的老巢,四周的地形比較復(fù)雜,小車上加個(gè)激光測(cè)距的裝置,實(shí)時(shí)測(cè)量離四周障礙物
2016-09-25 23:28:00
接近傳感器及現(xiàn)有方案接近感應(yīng)傳感器在我們的生活中發(fā)揮著重要的作用,在智能家居家電中廣泛存在,如自動(dòng)感應(yīng)出水的水龍頭,自動(dòng)感應(yīng)送風(fēng)的空調(diào),自動(dòng)檢測(cè)并避開障礙物的掃地機(jī)及自動(dòng)打開與關(guān)閉的走廊燈等等。接近
2022-11-10 07:51:16
百度網(wǎng)上和查閱教材了半天,只得到不外乎反復(fù)互相拷貝引用的兩種說法:1、“對(duì)于所設(shè)計(jì)的每一個(gè)電源層,一系列障礙物線將自動(dòng)的創(chuàng)建在板框周圍,這些線在屏幕上不可編輯,建立的障礙物線是原來(lái)設(shè)置寬度的兩倍
2017-11-04 11:27:16
小弟想做一個(gè)小車,51控制,檢測(cè)模塊采用光電開關(guān)和紅外對(duì)管(有障礙物都是低電平,無(wú)障礙物高電平),但是我如何控制它們的邏輯關(guān)系,需要什么模塊嗎,求大俠講解
2012-08-25 08:53:52
項(xiàng)目說明:本小車采用智能控制,能夠按照設(shè)定程序自行躲避障礙物,實(shí)現(xiàn)自身的特色。傳統(tǒng)的無(wú)線遙控汽車只能通過人為的干涉躲避行駛途中的障礙物,但人為去操作小車既麻煩又費(fèi)勁。由此,我們專門設(shè)計(jì)了全自動(dòng)躲避
2013-10-26 23:40:59
的功能。遙控車功能說明: 1、自動(dòng)壁障:在車頭部位安裝有紅外傳感器,可以測(cè)量與障礙物的距離,當(dāng)
2013-10-31 23:13:11
檢測(cè)障礙物有什么什么傳感器,用紅外反射還是超聲波測(cè)距,或者還有其他傳感器?
2023-11-08 06:33:49
電路設(shè)計(jì)要求:在一個(gè)數(shù)量為8*9的方格上安裝LED燈(LED為5w,共安裝72個(gè)),要求每個(gè)燈感應(yīng)到障礙物可以常亮,障礙物移走則熄滅。(障礙物距離燈20-300mm)方格四個(gè)角同時(shí)遇到障礙物時(shí)電路通電,移走障礙物電路斷電。
2020-03-06 11:24:08
本帖最后由 gk320830 于 2015-3-8 14:20 編輯
急需用到2米內(nèi)障礙物感應(yīng)器,帶開關(guān)功能或者高手幫忙設(shè)計(jì)個(gè)輔助開關(guān)電路,24V電源供電,多謝
2013-03-07 21:58:40
裝配在汽車上后,能結(jié)合本車的速度自動(dòng)判斷車前方的障礙物,當(dāng)車輛前方出現(xiàn)障礙物對(duì)本車構(gòu)成威脅時(shí),他能自動(dòng)報(bào)警,提醒駕駛?cè)藛T注意,駕駛員就能及時(shí)采取相應(yīng)的措施。 駕駛員未聽到報(bào)警或聽到報(bào)警未采取措施或
2012-04-25 16:39:57
線等周圍點(diǎn)線面的特征。對(duì)于高精度地圖,提取過特征與實(shí)時(shí)提取的特征進(jìn)行匹配,最終得到精準(zhǔn)的車本體速度,這是激光雷達(dá)的定位過程。激光雷達(dá)的第二個(gè)應(yīng)用:障礙物的檢測(cè)和分類。對(duì)于障礙物檢測(cè)和分類來(lái)講,目前
2017-09-08 17:24:48
用labview設(shè)計(jì)超級(jí)馬里奧游戲時(shí)如何加障礙物
2017-05-09 13:33:15
......{:4:}于是,求教萬(wàn)能的吧友們,有沒有好循跡,找車位停車的方案。真心感謝啊!!!!具體要求如下:一、任務(wù)設(shè)計(jì)并制作一個(gè)簡(jiǎn)易智能電動(dòng)車,具有自動(dòng)泊車功能。下圖是停車場(chǎng)。A,B 是泊車位,黑色加粗
2014-07-19 23:15:38
我現(xiàn)在需要使用紅外檢測(cè)一個(gè)比較小的障礙物,直徑兩厘米,黑色,金屬。很多紅外檢測(cè)模塊的賣家都不確定可以檢測(cè)的到,我現(xiàn)在有一個(gè)想法,不知道可不可行。我想檢測(cè)不到應(yīng)該是因?yàn)檫@個(gè)障礙物對(duì)紅外的反射比較
2014-04-03 11:28:56
想用單片機(jī)直接通過串口連接激光雷達(dá),測(cè)障礙物,該激光雷達(dá)波特率230400,是arduino的極限115200的兩倍,所以要用STM32的芯片了。其數(shù)據(jù)手冊(cè)說的還是不清楚,固連接電腦的串口根據(jù)測(cè)得
2022-02-24 06:31:00
本帖最后由 gk320830 于 2015-3-8 20:36 編輯
設(shè)計(jì)完P(guān)CB后走線不能躲避障礙物時(shí)什么情況?已經(jīng)設(shè)置了躲避障礙物還是不能躲避
2012-12-20 08:47:57
Infrared Proximity Sensor如何檢測(cè)前方是否有障礙物
2020-11-06 07:57:22
本帖最后由 一只耳朵怪 于 2018-5-28 09:31 編輯
題目:基于GPS/GPRS冷鏈運(yùn)輸車輛監(jiān)控系統(tǒng)的設(shè)計(jì)要求:?jiǎn)纹瑱C(jī)采集車廂內(nèi)溫濕度,利用GPRS將GPS定位的車輛信息和采集到
2018-05-26 18:51:35
本帖最后由 7681196 于 2016-4-24 14:17 編輯
最近參加學(xué)校一個(gè)比賽,就是用51單片機(jī)實(shí)現(xiàn)飛機(jī)避開障礙物的游戲,游戲規(guī)則就是飛機(jī)通過移動(dòng)來(lái)避開障礙物,碰到則游戲結(jié)束,有
2016-04-24 13:52:52
的《國(guó)務(wù)院關(guān)于進(jìn)一步加強(qiáng)企業(yè)安全生產(chǎn)工作的通知》,《通知》要求所有旅游包車、三類以上班線客車和運(yùn)輸危險(xiǎn)化學(xué)品、煙花爆竹、民用爆炸物品的道路專用車輛(簡(jiǎn)稱“兩客一危”車輛)安裝使用具有行駛記錄功能的衛(wèi)星定位
2018-06-05 14:13:36
遇障礙物時(shí)語(yǔ)音提示前方危險(xiǎn),請(qǐng)注意。語(yǔ)音模塊是isd1820單片機(jī)51 求幫忙
2017-02-24 21:43:00
為什么有些東西,遇到障礙物會(huì)自動(dòng)返回,是哪一種傳感器嗎?哪里有沒有這類的電路圖介紹下,非常感謝
2011-09-10 21:14:25
,一般設(shè)備都會(huì)節(jié)省25%以上的電能。智能警示系統(tǒng):自動(dòng)導(dǎo)引運(yùn)輸車具有聲、光、語(yǔ)音提示等報(bào)警功能,能自動(dòng)故障診斷和畫面提示操作,實(shí)時(shí)反饋任務(wù)進(jìn)程和突發(fā)狀況,大大提高運(yùn)行效率; 智能通信系統(tǒng):可編程邏輯控制器
2017-06-15 10:02:47
匯編語(yǔ)言程序設(shè)計(jì)案例1—?jiǎng)討B(tài)顯示/障礙物檢測(cè)/障礙物方位檢測(cè)
10-1. LED數(shù)碼管顯示原理10-2. 案例分析1(2位學(xué)號(hào)顯示)10-3. 案例分析2(簡(jiǎn)易按鍵搶答)10-4.
2009-03-23 12:15:35 38
38 介紹了一種適用于大批量生產(chǎn)的農(nóng)用運(yùn)輸車集成式實(shí)時(shí)檢測(cè)系統(tǒng), 闡述了該檢測(cè)系統(tǒng)的傳感、測(cè)量原理和測(cè)控系統(tǒng)的軟、硬件功能特點(diǎn), 利用該系統(tǒng)對(duì)批量生產(chǎn)的農(nóng)用運(yùn)輸車輛進(jìn)行檢
2009-07-03 09:25:1212
運(yùn)輸車輛拖斗輪胎無(wú)氣報(bào)警電路
2009-02-14 11:39:37560 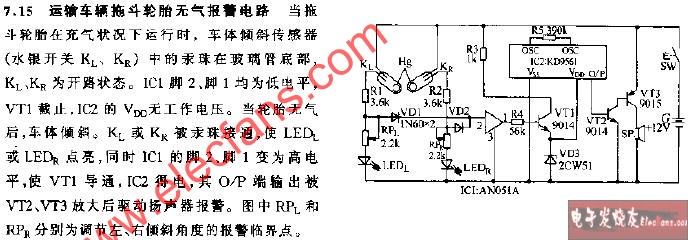
障礙物檢測(cè)實(shí)驗(yàn)
一、實(shí)驗(yàn)?zāi)康摹靶L(fēng)”小車在運(yùn)動(dòng)過程中要成功避開障礙物必須在一定距離外就探測(cè)到障礙物。在小車上探測(cè)障礙物
2009-03-23 10:47:292348 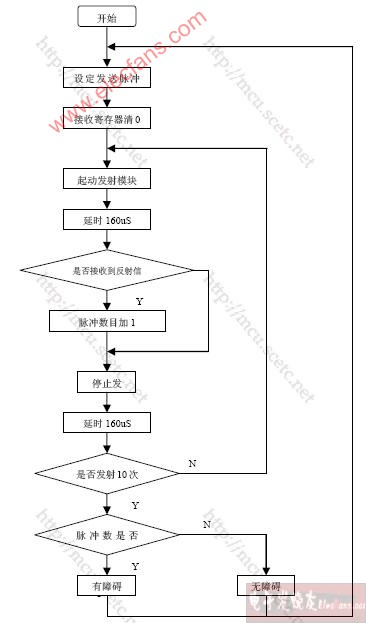
障礙物方位檢測(cè)實(shí)驗(yàn)
一、實(shí)驗(yàn)?zāi)康男≤囋谶\(yùn)動(dòng)中要成功避開障礙物,除了要檢測(cè)是否有障礙物外,還需要判斷障礙物的方位,以便小
2009-03-23 10:48:531843 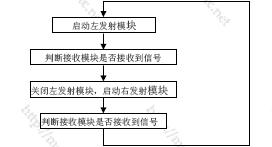
用單片機(jī)控制紅外編碼探測(cè)障礙物
介紹使用基于單片機(jī)控制紅外編碼探測(cè)障礙的方案及實(shí)現(xiàn)的方法,以解決使用紅外線自動(dòng)感知障礙設(shè)備時(shí)出現(xiàn)的接收設(shè)
2009-03-29 15:13:351779 
運(yùn)輸車輛拖斗輪胎無(wú)氣報(bào)警器電路圖
2009-05-28 12:42:20662 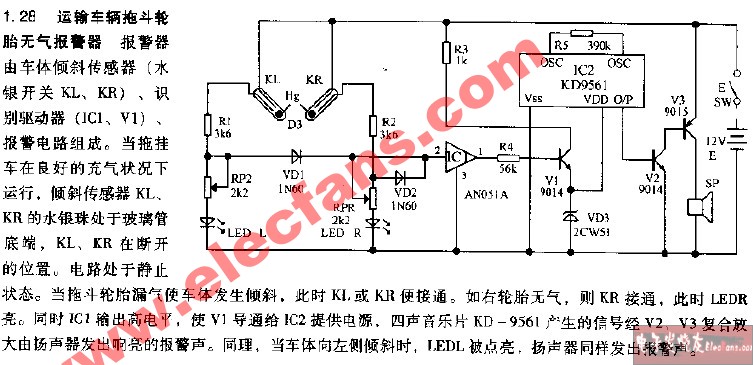
據(jù)外媒報(bào)道,大眾引入了新款熱成像攝像頭,可探查車輛前方的行人及障礙物,其測(cè)距為426英尺。該系統(tǒng)結(jié)合了智能座艙技術(shù),可在儀表組內(nèi)顯示前方圖像。
2018-05-10 10:37:003104 AGV是(Automated Guided Vehicle)的縮寫,意即“自動(dòng)導(dǎo)引運(yùn)輸車”,是指裝備有電磁或光學(xué)等自動(dòng)導(dǎo)引裝置,它能夠沿規(guī)定的導(dǎo)引路徑行駛,具有安全保護(hù)以及各種移載功能的運(yùn)輸車。
2018-08-06 08:00:0031 這個(gè)階段主要作用是障礙物集群做XY平面下的凸包多邊形計(jì)算,最終得到這個(gè)多邊形的一些角點(diǎn)。第一部分相對(duì)比較簡(jiǎn)單,沒什么難點(diǎn),計(jì)算凸包是調(diào)用plc庫(kù)的ConvexHull組件(具體請(qǐng)參考pcl::ConvexHull)。
2018-12-06 16:23:305063 
等,其中磁導(dǎo)引磁條鋪設(shè)方便、路徑變更容易,射頻識(shí)別不易污染、對(duì)聲光無(wú)干擾,因此集成RFID技術(shù)的磁導(dǎo)引AGV在自動(dòng)化生產(chǎn)運(yùn)輸中的應(yīng)用廣泛。
2019-01-03 15:03:011278 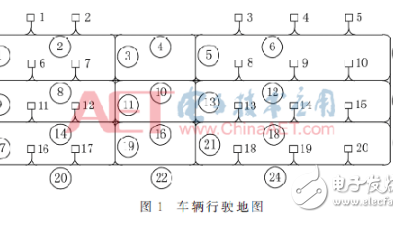
AGV全稱是Automated Guided Vehicle,意思是“自動(dòng)導(dǎo)引運(yùn)輸車”。AGV是裝備有電磁、光學(xué)或其它自動(dòng)導(dǎo)引裝置,能夠沿規(guī)定的導(dǎo)引路徑行駛,具有安全保護(hù)以及各種移載功能的運(yùn)輸小車。
2019-07-28 11:11:1644806 探測(cè)”(Barrier detection)系統(tǒng),能夠利用激光雷達(dá)探測(cè)車輛路徑上的障礙物。 專利文件中寫道:“激光雷達(dá)數(shù)據(jù)可為自動(dòng)駕駛車輛控制器所用,用于探測(cè)車輛環(huán)境中的物體,而且此類信息可用在動(dòng)態(tài)環(huán)境中,為車輛提供導(dǎo)航以及運(yùn)動(dòng)規(guī)劃。”蘋果“障礙物探測(cè)
2020-12-10 16:09:041812 基于機(jī)器人操作系統(tǒng)的市內(nèi)運(yùn)輸自動(dòng)導(dǎo)引車系統(tǒng)
2021-07-02 14:23:333 AGV即“自動(dòng)導(dǎo)引運(yùn)輸車”,是指裝備有電磁或光學(xué)等自動(dòng)導(dǎo)引裝置,能夠沿規(guī)定的導(dǎo)引路徑行駛,具有安全保護(hù)以及各種搬運(yùn)功能的運(yùn)輸車。其特點(diǎn)是無(wú)人駕駛,在導(dǎo)航設(shè)備的幫助下就能按照預(yù)設(shè)路線自動(dòng)駕駛。能24
2021-11-23 15:34:461732 AGV:即自動(dòng)導(dǎo)引運(yùn)輸車,是指裝備有電磁或光學(xué)等自動(dòng)導(dǎo)引裝置,它能夠沿規(guī)定的導(dǎo)引路徑行駛,具有安全保護(hù)以及各種移載功能的運(yùn)輸車。 AGV的的功能與特點(diǎn): 1、工作效率高。AGV小車可實(shí)現(xiàn)自動(dòng)充電功能
2021-12-08 17:23:295102 AGV是Automated Guided Vehicle的縮寫,意即"自動(dòng)導(dǎo)引運(yùn)輸車"。是裝備有電磁或光學(xué)等自動(dòng)導(dǎo)引裝置,能夠沿規(guī)定的導(dǎo)引路徑行駛,具有安全保護(hù)以及各種移載功能的運(yùn)輸車。AGV的應(yīng)用歷史較久,目前在倉(cāng)儲(chǔ)物流和制造業(yè)中均有廣泛應(yīng)用。
2022-06-01 16:45:533923 隨著我國(guó)經(jīng)濟(jì)的日益發(fā)展,貨物的流通日益增加,市場(chǎng)對(duì)于轉(zhuǎn)運(yùn)交通工具的需求也日益增加,近年來(lái)中國(guó)的運(yùn)輸車輛呈現(xiàn)爆發(fā)式增長(zhǎng)。變速器是重型運(yùn)輸車輛的核心總成之一,在新能源與智能化的時(shí)代背景下,運(yùn)輸車輛的自動(dòng)
2022-07-03 16:06:141382 電子發(fā)燒友網(wǎng)站提供《使用IR模塊的障礙物檢測(cè)器.zip》資料免費(fèi)下載
2022-11-14 11:31:220 AGV運(yùn)輸車全名Automated Guided Vehicle,簡(jiǎn)稱AGV,是裝備電磁或光學(xué)等自動(dòng)導(dǎo)航裝置,能夠沿著指定的導(dǎo)航路線進(jìn)行運(yùn)動(dòng),支持各種移動(dòng)搭載功能的移動(dòng)運(yùn)輸小車。在運(yùn)輸行業(yè),倉(cāng)儲(chǔ)行業(yè)
2023-06-16 17:17:25435 
電子發(fā)燒友網(wǎng)站提供《如何讓Arduino使用雷達(dá)避開障礙物.zip》資料免費(fèi)下載
2023-06-26 14:58:361 基于點(diǎn)云的3D障礙物檢測(cè) 主要有以下步驟: 點(diǎn)云數(shù)據(jù)的處理 基于點(diǎn)云的障礙物分割 障礙物邊框構(gòu)建 點(diǎn)云到圖像平面的投影 點(diǎn)云數(shù)據(jù)的處理 KITTI數(shù)據(jù)集 KITTI數(shù)據(jù)集有四個(gè)相機(jī),主要使用第三個(gè)
2023-06-26 10:22:38496 
編輯注:NVIDIA 自動(dòng)駕駛實(shí)驗(yàn)室系列視頻,將以工程技術(shù)為重點(diǎn)的視角關(guān)注實(shí)現(xiàn)自動(dòng)駕駛汽車的各個(gè)挑戰(zhàn)以及 NVIDIA DRIVE AV 軟件團(tuán)隊(duì)如何應(yīng)對(duì)這些問題。 自動(dòng)泊車輔助系統(tǒng)在感知障礙物
2023-07-13 21:15:01426 
,能夠沿規(guī)定的導(dǎo)引路徑行駛,具有安全保護(hù)以及各種移載功能的運(yùn)輸車,工業(yè)應(yīng)用中不需駕駛員的搬運(yùn)車。一般可通過電腦來(lái)控制其行進(jìn)路線以及行為,或利用電磁軌道來(lái)設(shè)立其行進(jìn)
2023-07-31 23:20:12322 
利用工業(yè)4g網(wǎng)關(guān)的無(wú)線通信技術(shù)、邊緣計(jì)算技術(shù)、智能感知等技術(shù),構(gòu)建全方位的危化品運(yùn)輸車監(jiān)控管理系統(tǒng),顯著提高運(yùn)輸車輛的安全性和可靠性。
2023-02-08 17:37:18394 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論