 電子發燒友App
電子發燒友App


引言
機器人的研究與開發是當今學術界和工業界的熱點之一,機器人的發布數量較之過去有明顯增長,2010年機器人市場規模預計將達到4700億美元。過去人們往往只能在實驗室或高科技競賽中見到機器人的身影,而如今它們已經走入工業應用甚至是普通人的生活中[1]。現在,機器人應用所覆蓋的領域包括無人駕駛車輛、險情救援、個人與服務機器人、醫療機器人、農業與采礦、教育與智力開發等,并且隨著科技的發展,機器人的應用領域還在不斷擴展。
但是機器人的快速發展也為該領域的研究與開發人員帶來了巨大的挑戰。機器人領域的著名科學家David Barrett博士(曾任iRobot公司副總裁、迪士尼夢幻工程公司主管,現任美國Olin學院SCOPE項目主管,)在2009年NIWeek圖形化系統設計會議上總結了當前機器人開發所面臨的三大挑戰:創造更小、更輕、更強大的電池;創造更小、更輕、更強大的執行機構;需要一個工業級的、并且具有良好兼容性的軟件開發平臺。這些挑戰也獲得了業內其他領導者的響應:Segway思維車的發明人、FIRST機構及DEKA研發公司的創始人Dean Kamen表達了對機器人開發中傳統嵌入式方法的顧慮;美國國防部地面機器人和自主系統主管Ellen Purdy關注于自主系統的進一步標準化和持久性(電池能力)需要;韓國浦項智能機器人研究所的Hee Chang Moon博士強調了對于集成的嵌入式系統以及直觀式開發軟件的需求。認識到這些挑戰,世界各地的業內人士都在努力尋求這些挑戰的解決之道:Dean Kamen的團隊選擇NI LabVIEW軟件和NI CompactRIO嵌入式硬件平臺用于FIRST項目中的機器人自主控制系統開發;TORC科技公司從傳統的編程工具轉而使用NI LabVIEW軟件平臺設計其復雜的自主系統,其CEO Michael Fleming在NIWeek會議上特別談到了TORC如何從功能強大的高級軟件中獲益,從而有助于簡化系統設計中的復雜問題。
接下來我們將展開分析這些挑戰,并探尋相應的應對方法。
圖1 FIRST機器人競賽平臺采用NI LabVIEW軟件和嵌入式硬件CompactRIO,在這些工具的幫助下即使是高中學生也能解決機器人設計中的復雜問題
挑戰一。 創造更小、更輕、更強大的電池
許多機器人需要在野外或嚴苛的環境中長時間獨立工作,需要可長時間獨立供電的電源。目前全世界有多家公司和研究機構致力于這方面研究。許多廠商選擇NI平臺用于設計仿真、生產優化、驗證測試等各個環節,推動其創新產品的研發、生產和應用,這些創新產品包括新型燃料電池、太陽能電池、基于小型移動平臺的高效發電和蓄能裝置等。
能夠長時間獨立運行的機器人系統不僅需要更高效的新型電池,還需要對能源的使用進行優化,例如通過增加電源管理功能有效地監測電量消耗并選擇不同的節電模式,這樣才能真正發揮出新型電池的效能優勢。NI計劃對其嵌入式硬件平臺CompactRIO和SingleBoard RIO增加內置電源自診斷和監視功能,使機器人開發人員可以通過相應的API直接訪問電池狀態,從而設計更優化的待機和節電模式。NI希望通過這些努力最終消除電源問題對機器人發展的制約。
挑戰二。 更小、更輕、更強大的執行機構
出于機器人體積和自重的考慮,一般希望執行機構也更輕更小;但同時由于不同的運動要求,又希望執行機構具有強大的功能。隨著移動性需求從傳統的四輪系統向新型仿生機械的不斷演進,對精密執行機構的需求也隨之大幅提升。世界上眾多的專業廠商一直從事這方面的研發,不斷推出高性能的產品。
對于機器人應用領域來說,創造更小、更輕、更強大的執行機構的最終目標是將它們用于機器人設計中,而且執行機構的強大功能往往需要通過復雜的編程才能發揮出來。因此,隨著執行機構變得越來越精密復雜,如何通過編程完成高精度和高復雜度的控制,也成為機器人系統開發的關鍵問題之一。許多機器人領域的開發人員并不具有運動控制方面的專業背景,在這種情況下,執行機構的交互式控制開發更顯得尤為重要。NI依靠超過25年與執行機構連接的經驗,通過提供基于各種平臺的硬件接口模塊和交互式的軟件工具不斷降低控制開發的復雜性,同時提高交互性和靈活性。NI還與行業內領先制造商(如Maxon Moter)合作,使其產品的編程開發更加簡便。
此外,在構建復雜運動系統的執行機構時,電機之間的協調工作也十分重要,比如在四輪驅動系統轉向或機械臂動作中,就需要多個電機配合協調工作。運用NI LabVIEW機器人模塊中所提供的Steering函數組和Kinematics函數組,就可以直接計算出在這些應用中每個電機分別需要的轉動速度,從而幫助機器人設計人員縮短了從高性能電機到創新機器人應用之間的距離。
圖2 NI嵌入式硬件平臺CompactRIO提供方便的電機接口,并可通過LabVIEW軟件交互式地完成軟件開發
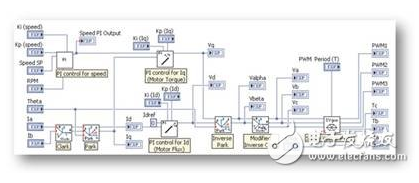
圖3 基于LabVIEW FPGA實現的FOC算法可以進一步提高現有電機控制系統的性能和效率
挑戰三。 對工業級軟件開發平臺的需求
除了硬件之外,機器人領域的研發人員還需要功能強大的軟件來設計他們的自主系統。人們往往容易忽視這一點,許多人認為“任何事情立即從頭設計都是相對簡單的”,但這對于當今機器人飛速發展的時代是不適用的。事實上,隨著一些技術領域的趨同并形成某種事實上的標準,創新已經不再意味著只是從零開始,更多的創新應用都是將模塊化的算法和功能組織在一起而完成的。機器人領域亦不例外,需要標準、工業級的軟件提供現成可用的算法和工具,從而幫助研發人員更快地完成創新。
1. 該軟件必須是直觀式的
許多機器人研發人員都具有機械工程或電子工程背景,但沒有時間和精力去學習復雜的計算機軟件技術,所以需要一款集成常用函數和算法的軟件開發工具,該工具還必須具有良好的交互性和易用性。此外,自主系統的終端用戶往往是營救人員(如消防員)、士兵或老年人等,他們也不一定具備計算機知識,因此用戶界面也必須足夠直觀。
錯誤!超鏈接引用無效。
2. 軟件必須具備與硬件的良好集成性
每個自主系統都必須感知或察覺周圍世界的環境并做出反應。感知系統需要外部傳感器(如激光測距儀、聲納傳感器等),做出反應則要依靠不同類型的執行機構完成。因此軟件工具必須能夠直接驅動各種傳感器和執行機構。除了感知系統和執行控制,往往還需要在真實硬件上實現決策規劃,這意味著軟件必須具有與實時系統、實時嵌入式硬件、甚至FPGA的強大交互性。目前的許多機器人軟件開發包缺乏類似功能,它們能夠仿真并在開發機器上運行,但不具備在實時硬件目標上的執行能力。
錯誤!超鏈接引用無效。
3. 軟件必須具備良好的交互性
完成機器人設計并不簡單,它需要反復修改和原型設計。因此機器人領域的研發人員需要一款可以輕松調試的軟件包,既可進行直觀的仿真,又能在實時硬件系統上快速實現,從而測試算法和真實I/O。每次硬件實驗之后都可能再回到開發環境,對代碼進行進一步優化或調整。這些都要求軟件開發工具具有極佳的交互性。
針對上述三點需求,NI LabVIEW軟件是一款理想的機器人開發軟件。LabVIEW圖形化編程方式使其天然具備直觀性。最新的LabVIEW機器人模塊還集成了常用的搜索、蔽障、路徑規劃、以及動力學算法,可以最大程度地幫助機器人開發人員快速實現應用。此外,與硬件的無縫集成也是LabVIEW的一大特點。通過LabVIEW軟件本身就可以連接各種傳感器和執行機構。完成算法仿真的LabVIEW代碼可以直接下載到NI嵌入式實時硬件平臺CompactRIO或SingleBoard RIO執行,從而實現真正的與硬件無縫集成。LabVIEW機器人模塊中還提供了多種機器人常用傳感器在實時硬件平臺下的現成驅動程序,從而使機器人的開發更為簡單。最后,LabVIEW提供交互式的調試環境和豐富的界面設計工具,各種算法都可在實時嵌入式硬件上直接實現,并可方便地反復修改驗證,滿足了機器人研究人員的調試需要。SCOPE項目主管Barrett博士稱LabVIEW正是工業界所需的軟件:“我花了15年時間力圖探尋最佳機器人編程語言,NI LabVIEW無愧殊榮。它能夠處理各類傳感器、多種執行機構、復雜動態控制算法,并能在實時環境下輕松進行驗證調試,完成系統實現。”
除了上述優點,NI LabVIEW還具有高度的靈活性和開放性。例如,LabVIEW機器人模塊已經提供一些成熟的路徑搜索算法,用戶可重用這些算法,同時用戶也可以基于這些基本的搜索算法添加他們的創新或最新研究成果,從而創建新型的搜索算法。用戶也可以將這些算法與LabVIEW中提供的其他算法或第三方技術集成從而開發更多的創新應用,如機器人救援或醫療輔助應用。LabVIEW是一個開放的軟件,它支持許多廠商的硬件平臺或自定義設備,并且支持調用多種第三方開發工具產生的代碼或模型,使其應用范圍拓展到機器人應用的各個領域。
結論
隨著機器人領域的快速發展,開發人員面臨著多方面的挑戰。全世界的研究機構和相關廠商都在研究應對這些挑戰的辦法。事實上,現在已經有一些工具可以幫助機器人領域的研發人員應對這些挑戰,比如NI LabVIEW軟件和嵌入式硬件平臺。我們深信專業知識不該成為創造機器人創新應用的瓶頸,未來每個工程師都應該能借助功能強大的設計工具從容地開發高端機器人。隨著技術的創新和進步,許多問題將被解決,同時又會出現新的問題,但只要有靈活開放的開發工具,就能夠不斷解決這些問題,使機器人領域的發展不斷達到新的高度。
責任編輯:ct











 工商網監
工商網監
評論