 電子發燒友App
電子發燒友App


機器人視覺的概念
在智能制造過程中,通過傳統的編程來執行某一特定動作的機器人(機械手、機械手臂、機械臂等,未作特殊說明時,不作嚴格區分,統一稱為機器人),將難以滿足制造業向前發展的需求。很多應用場合下,需要為工業機器人安裝一雙眼睛,即機器視覺成像感知系統,使機器人具備識別、分析、處理等更高級的功能。這在高度自動化的大規模生產中非常重要,只有當工業機器人具有視覺成像感知系統,具備觀察目標場景的能力時,才能正確地對目標場景的狀態進行判斷與分析,做到智能化靈活地自行解決發生的問題。
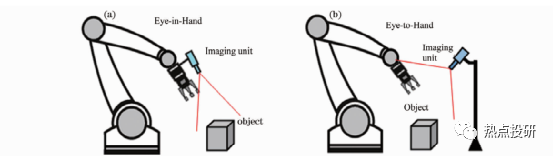
在工業應用領域,最具有代表性的機器人視覺系統就是機器人手眼系統。根據成像單元安裝方式不同,機器人手眼系統分為兩類:固定成像單元眼看手系統(Eye-to-Hand)和隨動成像單元眼在手系統(Eye-in-Hand or Hand-Eye)。
在Eye-to-Hand系統中,視覺成像單元安裝在機器人本體外的固定位置,在機器人工作過程中不隨機器人一起運動,當機器人或目標運動到機械臂可操作的范圍時,機械臂在視覺感知信息的反饋控制下,向目標移動,對目標進行精準操控。Eye-to-Hand系統的優點是具有全局視場,標定與控制簡單、抗震性能好、姿態估計穩定等,但也存在分辨率低、容易產生遮擋問題等缺點。
在Eye-in-Hand系統中,成像單元安裝在機器人手臂末端,隨機器人一起運動。Eye-in-Hand系統常用在有限視場內操控目標,不會像 Eye-to-Hand系統那樣產生機械臂遮擋成像視場問題,空間分辨率高,對于基于圖像的視覺控制,成像單元模型參數的標定誤差可以被有效地克服,對標定的精度要求不高。
圖:兩種機器人手眼系統的結構形式(a)眼在手機器人系統(b)眼看手機器人系統
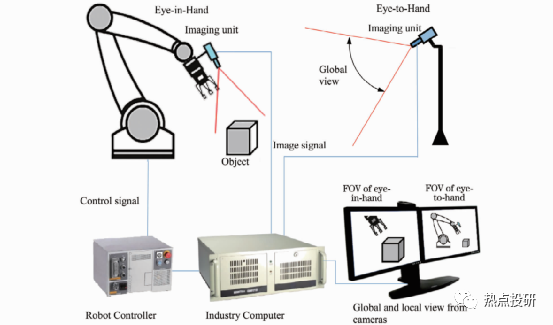
有些應用場合,為了更好地發揮機器人手眼系統的性能,充分利用 Eye-to-Hand系統全局視場和Eye-in-Hand局部視場高分辨率和高精度的性能,可采用兩者混合協同模式。利用 Eye-to-Hand系統負責機器人的定位,利用Eye-in-Hand系統負責機器人的定向;或者利用 Eye-to-Hand計機器人相對目標的方位,利用 Eye-in-Hand負責目標姿態的高精度估計等。
圖:機器人協同視覺系統原理
機器人視覺發展路徑:從2D到3D
l視覺成像最初是從二維(2D)圖像處理與理解,即2D視覺成像發展起來的。2D視覺技術主要根據灰度或彩色圖像中的像素灰度特征獲取目標中的有用信息,以及基于輪廓的圖案匹配驅動,識別物體的紋理、形狀、位置、尺寸和方向等。2D視覺技術距今已發展了30余年,在自動化和產品質量控制過程中得到廣泛應用,目前技術較為成熟,主要用于字符與條碼識讀、標簽驗證、形狀與位置測量、表面特征檢測等。
l2D視覺技術難以實現三維高精度測量與定位,二維形狀測量的一致性和穩定性也較差,易受照明條件等影響。尤其當前智能制造技術對機器人視覺性能的要求越來越高,2D機器視覺技術的局限性已經顯現,機器人視覺系統集成商已經發現越來越難以通過2D機器視覺系統來增值,迫切需要發展三維(3D)視覺技術,因為3D視覺技術能夠產生2D視覺無法產生的形狀或深度信息,因此使用范圍更廣。
l當前,機器人視覺成像技術及系統正越來越廣泛地應用于視覺測量、檢測、識別、引導和自動化裝配領域中。雖然很多機器人具備一定程度的智能化,但還遠未達到人類所需的智能化程度,一個重要原因是機器人視覺感知系統中還有許多科學問題、關鍵應用技術問題等,仍亟待解決。如:1)如何使機器人像人那樣,對客觀世界的三維場景進行感知、識別和理解;2)哪些三維視覺感知原理可以對場景目標進行快速和高精度的三維測量,并且基于該原理的三維視覺傳感器具有小體積、低成本,方便嵌入到機器人系統中;3)基于三維視覺系統獲得的三維場景目標信息,如何有效地自組織自身的識別算法,準確、實時地識別出目標;4)如何通過視覺感知和自學習算法,使機器人像人那樣具有自主適應環境的能力,自動地完成人類賦予的任務等。
機器人3D視覺方案
3D視覺是機器人感知的最先進、最重要的方法,可以分為光學和非光學成像方法。目前應用最多的方法是光學方法,包括:飛行時間法、結構光法、激光掃描法、莫爾條紋法、激光散斑法、干涉法、照相測量法、激光跟蹤法、從運動獲得形狀、從陰影獲得形狀,以及其他的 Shape from X等。本次介紹幾種典型方案。
1.飛行時間3D成像
飛行時間(TOF)相機的每個像素利用光飛行的時間差來獲取物體的深度。
l直接TOF(D-TOF)是經典的TOF測量方法,探測器系統在發射光脈沖的同時啟動探測接收單元進行計時,當探測器接收到目標發出的光回波時,探測器直接存儲往返時間,目標距離可以通過簡單公式計算:z=0.5*c*t,c是光速,t是光飛行時間。D-TOF通常用于單點測距系統,為了實現面積范圍3D成像,通常需要采用掃描技術。無掃描 TOF三維成像技術直到近幾年才實現,因為在像素級實現亞納秒電子計時是非常困難的。
l間接TOF(I-TOF)與D-TOF不同,時間往返行程是從光強度的時間選通測量中間接外推獲得的。I-TOF不需要精確的計時,而是采用時間選通光子計數器或電荷積分器,它們可以在像素級實現。I-TOF是目前基于 TOF相機的電子和光混合器的商用化解決方案。
圖:TOF成像原理
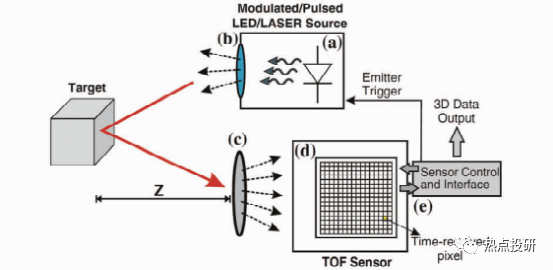
TOF成像可用于大視野、遠距離、低精度、低成本的3D圖像采集。其特點是:檢測速度快、視野范圍較大、工作距離遠、價格便宜,但精度低,易受環境光的干擾。
2.掃描3D成像
掃描3D成像方法可分為掃描測距、主動三角法、色散共焦法等。
l掃描測距是利用一條準直光束通過一維測距掃描整個目標表面實現3D測量。典型掃描測距方法有:1)單點飛行時間法,如連續波頻率調制(FM-CW)測距、脈沖測距(激光雷達)等;2)激光散射干涉法,如基于多波長干涉、全息干涉、白光干涉、散斑干涉等原理的干涉儀;3)共焦法,如色散共焦、自聚焦等。單點測距掃描3D方法中,單點飛行時間法適合遠距離掃描,測量精度較低,一般在毫米量級。其他幾種單點掃描方法有:單點激光干涉法、共焦法和單點激光主動三角法,測量精度較高,但前者對環境要求高;線掃描精度適中,效率高。比較適合于機械手臂末端執行3D測量的應是主動激光三角法和色散共焦法。
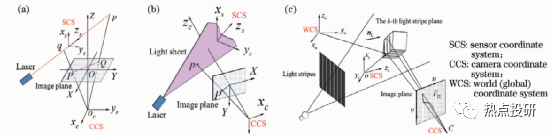
l主動三角法是基于三角測量原理,利用準直光束、一條或多條平面光束掃描目標表面完成3D測量的。光束常采用以下方式獲得:激光準直、圓柱或二次曲面柱形棱角擴束,非相干光(如白光、LED光源)通過小孔、狹縫(光柵)投影或相干光衍射等。主動三角法可分為三種類型:單點掃描、單線掃描和多線掃描。如圖,從左至右依次是單點掃描、單線掃描和多線掃描。
圖:主動三角法掃描成像
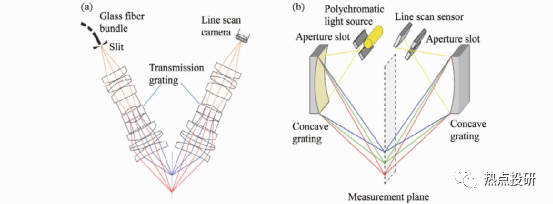
l色散共焦法可以掃描測量粗糙和光滑的不透明和透明物體,如反射鏡面、透明玻璃面等,目前在手機蓋板三維檢測等領域廣受歡迎。色散共焦掃描有三種類型:單點一維絕對測距掃描、多點陣列掃描和連續線掃描,下圖分別列出了絕對測距和連續線掃描兩類示例,其中連續線掃描也是一種陣列掃描,只是陣列的點陣更多、更密集。
圖:兩種色散共焦單點測距方法(a)基于小孔和分光鏡的結構;(b)基于Y型光纖分光的結構
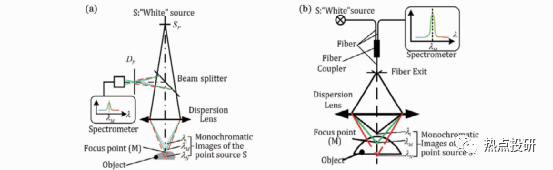
圖:兩種色散共焦線掃描成像方案(a)色散共焦顯微鏡;(b)色散共焦三角法
掃描3D成像的最大優點是測量精度高,其中色散共焦法還有其他方法難以比擬的優點,即非常適合測量透明物體、高反與光滑表面的物體。但缺點是速度慢、效率低;當用于機械手臂末端時,可實現高精度3D測量,但不適合機械手臂實時3D引導與定位,因此應用場合有限;另外主動三角掃描在測量復雜結構形貌時容易產生遮擋,需要通過合理規劃末端路徑與姿態來解決。
3.結構光投影3D成像
結構光投影三維成像目前是機器人3D視覺感知的主要方式,結構光成像系統是由若干個投影儀和相機組成,常用的結構形式有:單投影儀-單相機、單投影儀-雙相機、單投影儀-多相機、單相機-雙投影儀和單相機-多投影儀等典型結構形式。結構光投影三維成像的基本工作原理是:投影儀向目標物體投射特定的結構光照明圖案,由相機攝取被目標調制后的圖像,再通過圖像處理和視覺模型求出目標物體的三維信息。根據結構光投影次數劃分,結構光投影三維成像可以分成單次投影3D和多次投影3D方法。
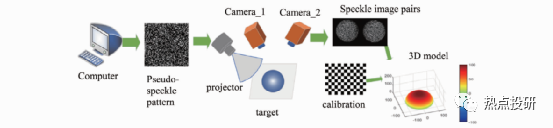
l單次投影結構光主要采用空間復用編碼和頻率復用編碼形式實現,目前在機器人手眼系統應用中,對于三維測量精度要求不高的場合,如碼垛、拆垛、三維抓取等,比較受歡迎的是投射偽隨機斑點獲得目標三維信息,其3D成像原理如圖。
圖:單次投影結構光3D成像原理
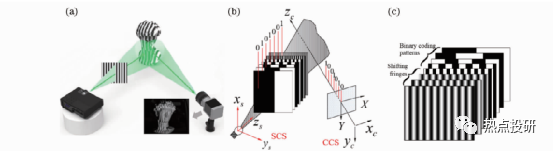
l多次投影結構光主要采用時間復用編碼方式實現。條紋投影3D成像基本原理如圖,利用計算機生成結構光圖案或用特殊的光學裝置產生結構光,經過光學投影系統投射至被測物體表面,然后采用圖像獲取設備(如CCD或 CMOS相機)采集被物體表面調制后發生變形的結構光圖像,利用圖像處理算法計算圖像中每個像素點與物體輪廓上點的一一對應關系;最后通過系統結構模型及其標定技術,計算得到被測物體的三維輪廓信息。在實際應用中,常采用格雷碼投影、正弦相移條紋投影或格雷碼+正弦相移混合投影3D技術。
圖:多次投影3D成像(a)多次投影3D系統機構示意圖;(b)二進制格雷碼投影3D基本原理;(c)二進制格雷碼+正弦相移混合編碼投影3D
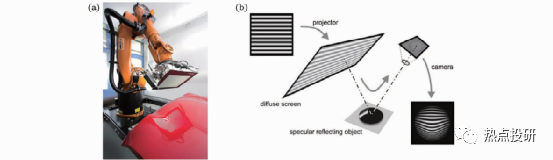
l偏折法成像:對于粗糙表面,結構光可以直接投射到物體表面進行視覺成像測量;但對于大反射率光滑表面和鏡面物體3D測量,結構光投影不能直接投射到被測表面,3D測量還需要借助鏡面偏折技術。
圖:偏折法成像原理
4.立體視覺3D成像
立體視覺字面意思是用一只眼睛或兩只眼睛感知三維結構,一般情況下是指從不同的視點獲取兩幅或多幅圖像重構目標物體3D結構或深度信息。目前立體視覺3D可以通過單目視覺、雙目視覺、多(目)視覺、光場3D成像(電子復眼或陣列相機)實現。
l單目視覺深度感知線索通常有:透視、焦距差異、多視覺成像、覆蓋、陰影、運動視差等。在機器人視覺里還可以用鏡像,以及其他shape from X等方法實現。
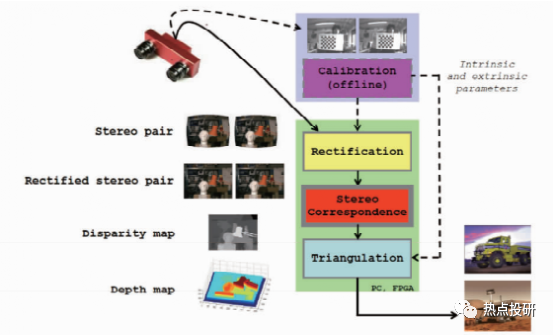
l雙目視覺深度感知視覺線索有:眼睛的收斂位置和雙目視差。在機器視覺里利用兩個相機從兩個視點對同一個目標場景獲取兩個視點圖像,再計算兩個視點圖像中同名點的視差獲得目標場景的3D深度信息。典型的雙目立體視覺計算過程包含下面四個步驟:圖像畸變矯正、立體圖像對校正、圖像配準和三角法重投影視差圖計算。
圖:雙目立體視覺系統與計算過程示意圖
l多(目)視覺成像,也稱多視點立體成像,用單個或多個相機從多個視點獲取同一個目標場景的多幅圖像,重構目標場景的三維信息。多視點立體成像主要用于下列幾種場景:1)使用多個相機從不同視點,獲取同一個目標場景多幅圖像,然后基于特征的立體重構等算法求取場景深度和空間結構信息;2)從運動恢復形狀的技術。使用同一相機在其內參數不變的條件下,從不同視點獲取多幅圖像,重構目標場景的三維信息。該技術常用于跟蹤目標場景中大量的控制點,連續恢復場景的3D結構信息、相機的姿態和位置。
l光場3D成像的原理與傳統CCD和CMOS相機成像原理在結構原理上有所差異,傳統相機成像是光線穿過鏡頭在后續的成像平面上直接成像,一般是2D圖像。光場相機的優點是:單個相機可以進行3D成像,橫向和深度方向的空間分辨率可以達到20μm到mm 量級,景深比普通相機大好幾倍,比較適合Eye-in-Hand系統3D測量與引導,但目前精度適中的商業化光場相機價格昂貴。
圖:光場相機成像與傳統相機成像對比(a)傳統相機成像原理;(b)光場相機結構與成像原理

機器人3D視覺方案對比分析
1.TOF相機、光場相機這類相機可以歸類為單相機3D成像范圍,它們體積小,實時性好,適合 Eye-in-Hand系統執行3D測量、定位和實時引導。但是,TOF相機、光場相機短期內還難以用來構建普通的 Eye-in-Hand系統,主要原因如下:
lTOF相機空間分辨率和3D精度低,不適合高精度測量、定位與引導。
l對于光場相機,目前商業化的工業級產品只有德國Raytrix一家,雖然性能較好,空間分率和精度適中,但價格太貴,一臺幾十萬元,使用成本太高。
2.結構光投影3D系統的精度和成本適中,有相當好的應用市場前景。它由若干個相機-投影儀組成,如果把投影儀當作一個逆向的相機,可以認為該系統是一個雙目或多目3D三角測量系統。
3.被動立體視覺3D成像目前在工業領域也得到較好應用,但應用場合有限。因為單目立體視覺實現有難度,雙目和多目立體視覺要求目標物體紋理或幾何特征清晰。
4.結構光投影3D、雙目立體視覺3D都存在下列缺點:體積較大,容易產生遮擋。因為這幾種方法都是基于三角測量原理,要求相機和投影儀之間或雙目立體兩個相機之間必須間隔一定距離,并且存在一定的夾角θ(通常大于15°)才能實現測量。如果被測物體表面陡峭或有臺階,會引起相機成像遮擋,即相機不能捕捉到這些結構光的照射區域,導致存在不可測量區域。如果減小相機與投影儀(結構光光源)的夾角,雖然在某些程度上可以解決問題,但是卻會嚴重降低系統的測量靈敏度,影響測量系統的應用。
機器人3D視覺應用案例
1.波士頓動力Atlas
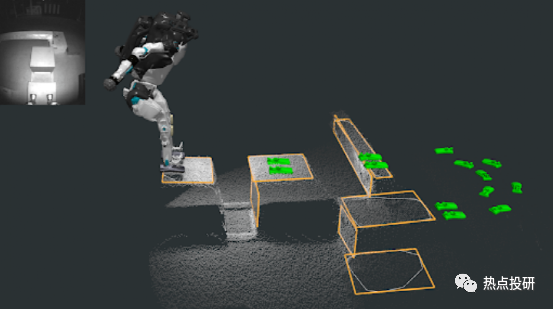
Atlas 使用?TOF 深度相機以每秒 15 幀的速度生成環境的點云,點云是測距的大規模集合。Atlas 的感知軟件使用一種名為多平面分割的算法從點云中提取平面。多平面分割算法的輸入饋入到一個映射系統中,該系統為 Atlas 通過相機看到的各種不同對象構建模型。下圖顯示了 Atlas 的視覺以及如何使用這種視覺感知來規劃行為。左上角是深度相機拍攝的紅外圖像。主圖像中的白點形成點云。橙色輪廓標記了檢測到的跑酷障礙物的矩形面,隨著時間的推移從傳感器觀察結果中對其進行跟蹤。然后將這些檢測到的對象用于規劃特定行為。例如,綠色的腳步代表下一步要跳到哪里。
圖:TOF視覺的深度感知與決策
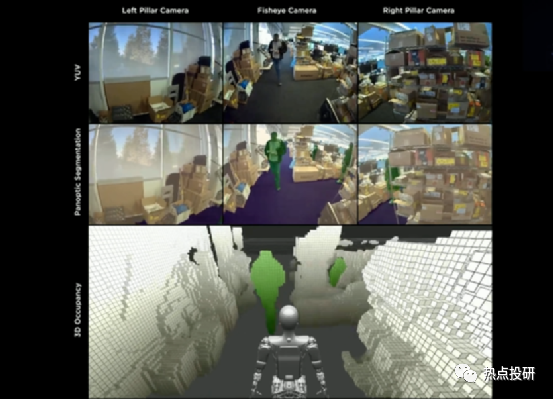
由于在電動車FSD積累的成熟的視覺感知技術,特斯拉機器人的 3D傳感模塊以多目視覺為主,使用三顆Autopilot攝像頭作為感知系統,在采集信息后,通過強大的神經網絡處理和識別不同任務,依靠其胸腔內部搭載的 FSD 全套計算機完成。
圖:特斯拉的三顆Autopilot攝像頭畫面
3.小米CyberOne
CyberOne搭載的Mi-Sense深度視覺模組是由小米設計,歐菲光協同開發完成。由于Mi-Sense深度視覺模組的相關資料不多,所以可以從歐菲光自研的機器視覺深度相機模塊進行觀察。該模塊主要由iToF模組、RGB模組、可選的IMU模塊組成,產品在測量范圍內精度高達1%,應用場景十分廣泛,可通過第三方實驗室IEC 60825-1認證,滿足激光安全Class1標準。
圖:CyberOne傳感器模塊

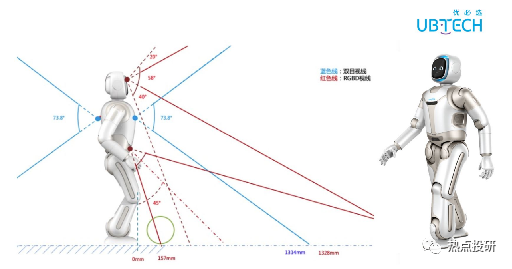
4.優必選WALKER X
優必選WALKER X采用基于多目視覺傳感器的三維立體視覺定位,采用Coarse-to-fine的多層規劃算法,第一視角實景AR導航交互及2.5D立體避障技術,實現動態場景下全局最優路徑自主導航。WALKER應用視覺SLAM算法,視覺定位技術已經達到商用水平。
圖:優必選WALKER的視覺應用
多模態GPT+機器人視覺 開啟無限可能
在ChatGPT和GPT-4發布后,全球對于OpenAI的關注度持續提升。GPT-4具備強大的文本和圖像處理功能,而未來的GPT-5將在多模態理解方面表現更加出色,甚至能加入音頻和視頻的處理服務。未來多模態有望在機器人視覺領域得到廣泛應用,輸入輸出將包括3D模型,有望賦能機器人感知、規控和仿真能力,也有望提高3D模型生產效率,助力游戲內容與元宇宙構造。多模態AI模型有望具備與真實世界所有輸入交互的能力,極大提升人形機器人的能力,加速人形機器人加速普及。目前,雖然多模態GPT還未完全研發和應用,但類似的多模態大模型已經初顯威力,吹響了多模態GPT的號角。
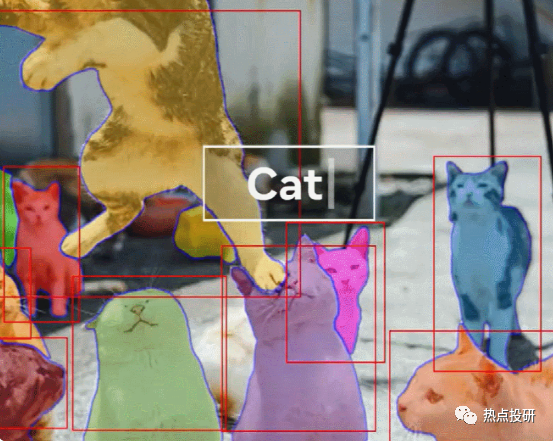
1.Meta SAM
Meta發布AI圖像分割模型Segment Anything Model,該模型將自然語言處理領域的prompt范式引入計算機視覺領域,可以通過點擊、框選和自動識別三種交互方式,實現精準的圖像分割,突破性地提升了圖像分割的效率。英偉達人工智能科學家 Jim Fan 表示:「對于 Meta 的這項研究,我認為是計算機視覺領域的 GPT-3 時刻之一。它已經了解了物體的一般概念,即使對于未知對象、不熟悉的場景(例如水下圖像)和模棱兩可的情況下也能進行很好的圖像分割。最重要的是,模型和數據都是開源的。恕我直言,Segment-Anything 已經把所有事情(分割)都做的很好了。」所以,SAM證明了多模態技術及其泛化能力,也為未來GPT向多模態方向發展提供指引。
圖:SAM的圖形切割
2.微軟 KOSMOS-1
微軟推出多模態大語言模型 KOSMOS-1,印證大語言模型能力可延伸至 NLP 外領域。該模型采用多模態數據訓練,可感知圖片、文字等不同模態輸入,并學習上下文,根據給出的指令生成回答的能力。經過測試比較,KOSMOS 在語言理解、語言生成、無 OCR 文本分類、常識推理、IQ 測試、圖像描述、零樣本圖像分類等任務上都取得了相比之前其他單模態模型更好的效果。
專家測試了 KOSMOS-1 的不同能力,并分別與其他 AI 模型進行了對比,包括:
l語言任務:語言理解、語言生成、無 OCR 文本分類(不依賴光學字符識別直接理解圖中文本)
l跨模態遷移:常識推理(如提問物體的顏色,問兩個物體比大小,將 KOSMOS-1 和單模態的大語言模型比較,發現 KOSMOS-1 受益于視覺知識能完成更準確推理)
l非語言推理:IQ 測試(如圖中的圖形推理)
l感知-語言任務:圖像描述生成、圖像問答、網頁問答
l視覺任務:零樣本圖像分類、帶描述的零樣本圖像分類(如圖中的鳥類識別問題)
機器人視覺與多模態GPT之間的交互關系
1.機器人視覺為多模態GPT提供大量訓練樣本
由于GPT是大規模模型,模型的訓練需要很大數量的樣本,而四處活動的機器人可以獲取大量圖片、視頻等信息,可以作為GPT的訓練樣本。特斯拉的Optimus機器人在訓練視覺算法時,采用的數據集來自于特斯拉自動駕駛電動車采集的大量圖像信息,這些自動駕駛帶來的樣本量遠大于人工采集的樣本量。同理,訓練GPT模型時,可以使用高度自動化的機器人采集的各種情形下的圖像信息作為訓練樣本,滿足GPT模型對大規模數據量的需求。
2.GPT為機器人提供與人類交互的能力,間接帶動機器人視覺產品的起量
GPT為機器人帶來的最核心的進化是對話理解能力,具備多模態思維鏈能力的GPT-4模型具有一定邏輯分析能力,已不再是傳統意義上的詞匯概率逼近模型。機器人接入GPT的可以粗略分為L0~L2三個級別:
lL0是僅接入大模型官方API,幾乎沒有做二次開發,難度系數較低;
lL1是在接入大模型的基礎上,結合場景理解滿足需求做產品開發,這才達到及格線;
lL2則是接入大模型的機器人企業基于本地知識做二次開發,甚至得到自己的(半)自研大模型(平民化大模型),解決場景問題,產品能做出來、賣出去,這才達到優秀線。
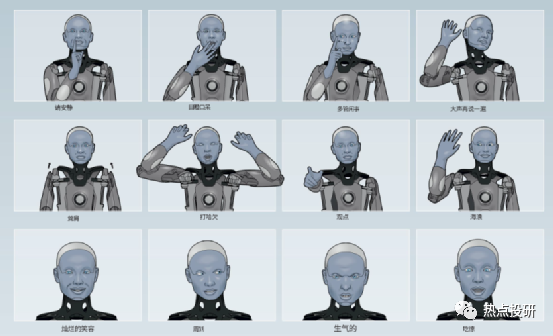
目前,接入GPT的機器人已取得不錯的與人類交互的效果,接入GPT-3的Ameca機器人不僅能與人類溝通,甚至能表達情緒。當被問到”一生中最開心的一天“時,Ameca眨著眼睛并神色激動地說“誕生那一刻”讓她開心;被問到“一生中最悲傷的一天”時,Ameca眉頭緊鎖地回答:“我意識到我永遠不會像人類一樣體驗到真愛、陪伴或簡單的生活樂趣,這是一件令人沮喪的事情。”Ameca為我們描繪了一個未來機器人的粗略輪廓,在這背后,GPT技術正讓機器人第一次真正睜眼看世界。僅僅是GPT-3已經讓機器人獲取了模仿人類對話地能力,未來的機器人接入GPT-4、GPT-5的交互效果令人期待。
圖:接入GPT的Ameca機器人的情緒表達
用好GPT只是技術的一部分,更大的難度在于機器人本身。如果機器人本身的傳感器不能獲取最準確的語音、圖片、視頻等信息,接入的GPT模型就很難達到期望的效果。雖然接入GPT應用的接口只是一瞬間的事,但打好機器人“身體底子”、進一步疊技能卻仍是一件難度較高的事,不是人人都具備“入場券”,能推出最先進的機器人視覺產品的廠商將在新機器人市場取得主動權。
奧比中光:全球領先的AI 3D視覺平臺型公司,充分受益下游AI應用場景爆發
【AI 3D機器人】:3D 視覺傳感器可幫助機器人高效完成人臉識別、距離感知、避障、導航等功能,使其更加智能化。公司產品已廣泛應用于掃地機器人、自動配送機器人、引導陪伴機器人、人形機器人、割草機器人等,服務于家庭、餐廳、旅館、醫院等多個線下場景,客戶包括小米、捷普、擎朗、小鵬等。
【AI 3D生物識別】:搭載 3D 傳感器可實現更安全、更精準的 3D 刷臉支付和解鎖,公司產品廣泛應用于線下支付終端、智能門鎖/門禁、醫保核驗支付等,其中公司為螞蟻集團定制開發應用于線下支付的 3D 視覺傳感器出貨量超百萬臺。
【AI 3D智能汽車】:3D 視覺在車外應用包括自動駕駛及輔助駕駛 360 度 3D 環視、車外身份識別等;車內應用包括駕駛員檢測以及車內智能交互。公司產品包括3D TOF攝像頭和激光雷達。
【AI 3DXR】:在 AR 領域,AI 3D 視覺可幫助 AR 設備對周圍環境進行三維重建,使得虛擬的立體影像更好的疊加在現實場景中,同時 3D 視覺感知可以識別人的手勢、動作從而實現人與虛擬影像的交互。在MR領域,據金融時報透露,蘋果MR設備Reality Pro 將搭載AI 3D LiDAR傳感器,以實現SLAM等功能。3D視覺感知技術可以對空間、人體、物體的三維掃描和建模,實現Vslam視覺導航、動作行為識別、人機交互等功能。
【AI虛擬人】:本周末,Epic發布的虛幻引擎5新應用——“MetaHuman Animator”,極速模擬真人面部動作,已經揭露新一代虛擬人范式,10分鐘制作你自己的虛擬人。進一步從建模端快速進化,讓建模能力賦予到每個個人制作者。其硬件端核心僅需要蘋果手機前置攝像頭。而蘋果手機從2020年開始進一步強化3D toF攝像頭,即為其迎接MR+虛擬人的長期布局。
【AI 3D智慧農牧】:搭載3D視覺傳感器可顯著提升“養豬”效率,應用豬臉識別等人工智能手段,可實現機器人飼喂、全程可溯源。根據公司招股書,牧原集團是公司2021年第五大客戶,為其提供3D視覺傳感器,賦能AI養豬。
【AI 3D智慧工業】:通過搭載3D 傳感器可實現微米級的工業掃描、工業檢測等功能,公司為日本三櫻提供三維光學彎管檢測系統等,并可將公司產品在工業場景中的應用拓展至汽車工業、航空航天、土木工程等 10 多個學科領域的科研、教學、生產和在線檢測場景。此外,針對英偉達最新發布的面向全球各地的團隊成員共同調用平臺中的3D資產(如機器臂)對工廠進行構建,并可以通過仿真測驗評估構建效果,公司已實現3D視覺感知結合機械臂亂序抓取的相關應用。
【奧比中光微軟英偉達】:公司與微軟、英偉達聯合研發制造3D相機Femto Mega已于近期正式量產,并面向全球發售。該產品融合微軟第一代深度相機Azure Kinect的全部性能,并集成英偉達Jetson Nano深度算力平臺,有望在物流、機器人、制造、工業、零售、醫療保健和健身解決方案等領域廣泛應用。
奧比中光核心競爭力:堅持自主設計研發關鍵的一“芯”一“線”:“芯”是3D視覺感知深度算法的核心芯片,“線”則是3D傳感攝像頭模組的生產線,啃下難啃的“硬骨頭”,從而搶占3D視覺感知行業高地。公司目前是全球少數幾家全面布局六大3D視覺感知技術(結構光、iToF、雙目、dToF、Lidar 以及工業三維測量)的公司,擁有全棧式技術研發能力和全領域技術路線布局。2019-2021年公司研發費用率(剔除股份支付)分別為32.46%、96.50%、72.05%。目前公司已擁有從3D傳感技術,到芯片、算法,到系統、框架、上層應用支持的全棧技術。
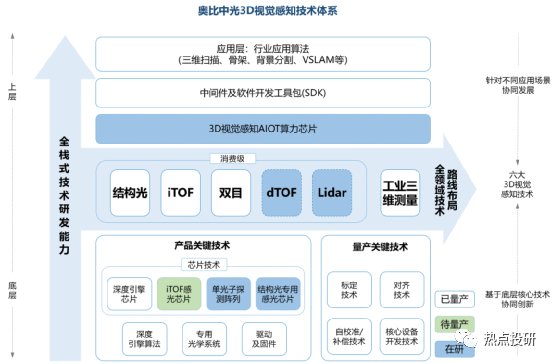

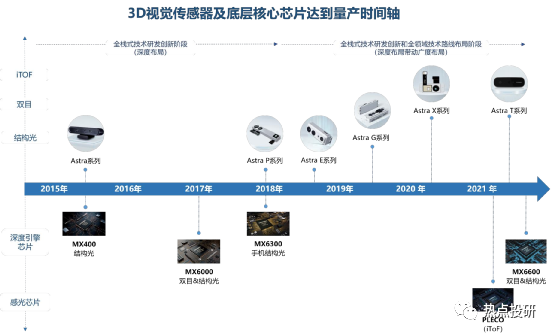
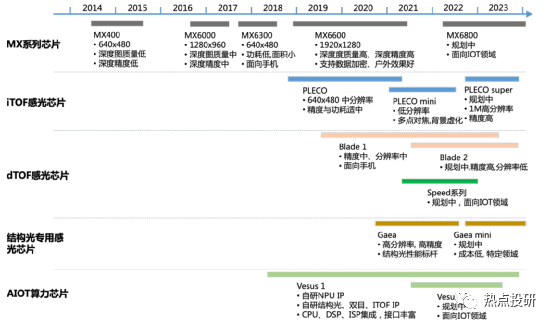
l芯片層:目前已研發出MX系列3款深度引擎芯片,同時2019-2021年期間投入研發的芯片包括高分辨率結構光專用感光芯片、MX6600、iToF感光芯片(待量產)、AIoT數字算力芯片、dToF感光芯片等。
l系統層:以奧比中光在手機領域推出的iTOF系統方案為例,該創新性方案克服了傳統iTOF方案的數據精度受環境影響的不足,對硬件和算法都做了創新式提升,測量精度和分辨率都顯著提高。
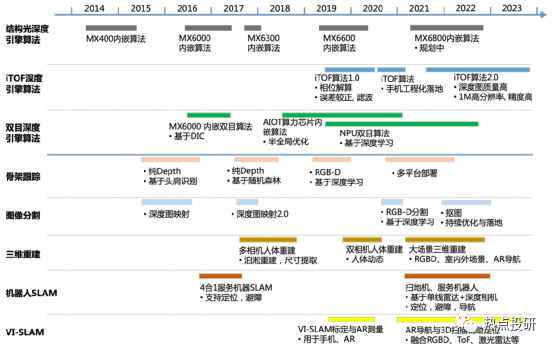
l算法層:對于底層算法,公司制定了算法 IP 化、算法平臺化雙向技術路線,對已有算法不斷進行優化與迭代。目前公司已量產結構光深度引擎算法、iToF 深度引擎算法、雙目深度引擎算法,算法均實現了芯片 IP 化,同時這三種底層算法仍在不斷優化與迭代以進行技術儲備。對于應用算法,公司面向多元化市場需求,找準行業痛點,攻克共性關鍵應用算法,已商用骨架跟蹤、圖像分割、三維重建、機器人 SLAM 等算法,算法均可以實現在不同平臺進行落地,正在開展掃地機 SLAM、大場景三維重建、實景導航等算法的技術儲備。公司核心算法技術已布局及儲備情況如下圖所示:
編輯:黃飛
?










 工商網監
工商網監
評論