 電子發(fā)燒友App
電子發(fā)燒友App


工業(yè)機(jī)器人是集機(jī)械、電子、控制、計(jì)算機(jī)、傳感器、人工智能等多學(xué)科先進(jìn)技術(shù)于一體的現(xiàn)代制造業(yè)中重要的自動(dòng)化裝備。機(jī)器人技術(shù)、數(shù)控技術(shù)和PLC技術(shù)并稱為工業(yè)自動(dòng)化的三大支持技術(shù)。機(jī)器人技術(shù)及其產(chǎn)品發(fā)展非常迅速,已成為柔性制造系統(tǒng)(FMS)、自動(dòng)化工廠(FA)、計(jì)算機(jī)集成制造系統(tǒng)(CIMS)的自動(dòng)化工具,同時(shí)也是工業(yè)4.0智能化工廠中重要的一環(huán)。? ? ? ? ? ? ? ? ? ? ? ? ? ? ?
「?1.?工業(yè)機(jī)器人系統(tǒng)組成及性能指標(biāo)?」
1)工業(yè)機(jī)器人系統(tǒng)組成
工業(yè)機(jī)器人是面向工業(yè)領(lǐng)域的多關(guān)節(jié)機(jī)械手或多自由度的機(jī)器裝置,它能自動(dòng)執(zhí)行工作,是靠自身動(dòng)力和控制能力來實(shí)現(xiàn)各種功能的一種機(jī)器。它可以接受人類指揮,也可以按照預(yù)先編排的程序運(yùn)行,現(xiàn)代的工業(yè)機(jī)器人還可以根據(jù)人工智能技術(shù)制定的原則綱領(lǐng)行動(dòng)。一個(gè)典型的工業(yè)機(jī)器人如圖1所示,工業(yè)機(jī)器人按照技術(shù)發(fā)展水平可以分為三代:第一代示教再現(xiàn)機(jī)器人、第二代感知機(jī)器人、第三代智能機(jī)器人。

圖1?工業(yè)機(jī)器人系統(tǒng)結(jié)構(gòu)組成
如圖1所示,第一代工業(yè)機(jī)器人在外部結(jié)構(gòu)上主要由三部分組成:操作機(jī)(或稱機(jī)器人本體)、控制器和示教器。對(duì)于第二代及第三代工業(yè)機(jī)器人還包括感知系統(tǒng)和分析決策系統(tǒng),它們分別由傳感器及軟件實(shí)現(xiàn)。
(1)操作機(jī):用于完成各種作業(yè)任務(wù)的機(jī)械主體,主要包含機(jī)械臂、驅(qū)動(dòng)裝置、傳動(dòng)單元以及內(nèi)部傳感器等部分。
(2)控制器:是根據(jù)指令及傳感器信息控制機(jī)器人本體完成一定動(dòng)作的裝置,是決定機(jī)器人功能和性能的關(guān)鍵部分,也是工業(yè)機(jī)器人更新和發(fā)展最快的部分。
(3)示教器:是機(jī)器人的人機(jī)交互接口,操作者可通過它對(duì)機(jī)器人進(jìn)行編程或手動(dòng)操縱機(jī)器人移動(dòng)。
工業(yè)機(jī)器人從功能上由3大部分6個(gè)子系統(tǒng)組成。3大部分分別是機(jī)械部分、控制部分和傳感部分。6個(gè)子系統(tǒng)分別是驅(qū)動(dòng)系統(tǒng)、機(jī)械結(jié)構(gòu)系統(tǒng)、人機(jī)交互系統(tǒng)、控制系統(tǒng)、感受系統(tǒng)、機(jī)器人與環(huán)境交互系統(tǒng),其對(duì)應(yīng)關(guān)系見圖2。
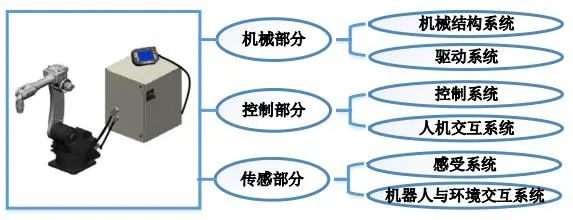
圖2?工業(yè)機(jī)器人系統(tǒng)功能組成
2)工業(yè)機(jī)器人性能指標(biāo)
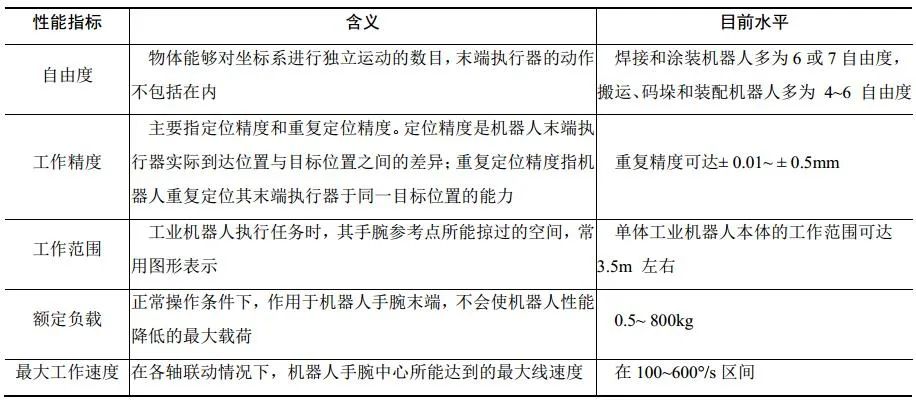
工業(yè)機(jī)器人的性能指標(biāo)是機(jī)器人生產(chǎn)廠商在產(chǎn)品供貨時(shí)所提供的技術(shù)數(shù)據(jù),反映了機(jī)器人的適用范圍和工作性能,是選擇機(jī)器人時(shí)必須考慮的問題。盡管機(jī)器人廠商提供的技術(shù)數(shù)據(jù)不完全相同,工業(yè)機(jī)器人的結(jié)構(gòu)、用途和用戶的需求也不相同,但其主要的性能指標(biāo)一般為:自由度、工作精度、工作范圍、額定負(fù)載、最大工作速度等[2],具體含義見表1。
表1?工業(yè)機(jī)器人性能指標(biāo)及含義
需要說明的是,機(jī)器人在工作范圍內(nèi)可能存在奇異點(diǎn)。奇異點(diǎn)是由于機(jī)器人結(jié)構(gòu)的約束,導(dǎo)致關(guān)節(jié)失去某些特定方向的自由度的點(diǎn)。奇異點(diǎn)通常存在于作業(yè)空間的邊緣,如奇異點(diǎn)連成一片,則稱為“空穴”。機(jī)器人運(yùn)動(dòng)到奇異點(diǎn)附近時(shí),由于自由度的逐步喪失,關(guān)節(jié)的姿態(tài)會(huì)急劇變化,這將導(dǎo)致驅(qū)動(dòng)系統(tǒng)承受很大的負(fù)載而產(chǎn)生過載。因此,對(duì)于存在奇異點(diǎn)的機(jī)器人來說,其工作范圍還需要除去奇異點(diǎn)和空穴。圖3所示邊緣不規(guī)則處即為除去部分。
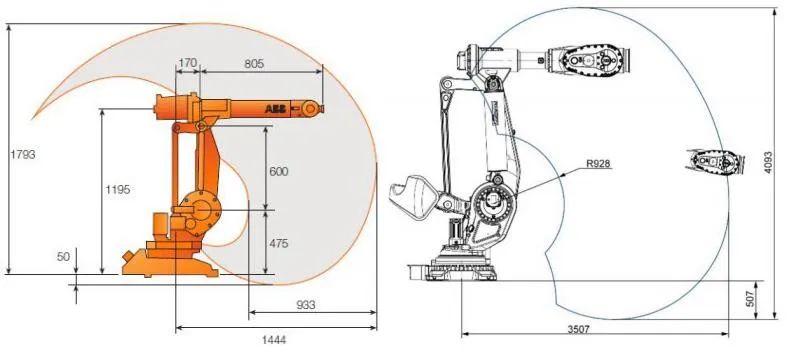
圖3 ABB工業(yè)機(jī)器人IRB1410(左)和IRB8700(右)工作范圍
「?2.?工業(yè)機(jī)器人的控制?」
1)工業(yè)機(jī)器人控制的特點(diǎn)及要求
多數(shù)工業(yè)機(jī)器人各關(guān)節(jié)的運(yùn)動(dòng)是相互獨(dú)立的,為了實(shí)現(xiàn)機(jī)器人末端執(zhí)行器的位置精度,需要多關(guān)節(jié)的協(xié)調(diào)。因此,工業(yè)機(jī)器人控制系統(tǒng)與普通的控制系統(tǒng)相比要復(fù)雜,具有以下特點(diǎn):
(1)本質(zhì)上是一個(gè)非線性系統(tǒng)。
(2)是由多關(guān)節(jié)組成的多變量控制系統(tǒng),且各關(guān)節(jié)間具有耦合作用。
(3)是一個(gè)時(shí)變系統(tǒng),其動(dòng)力學(xué)參數(shù)隨著關(guān)節(jié)運(yùn)動(dòng)位置的變化而變化。
(4)要求對(duì)環(huán)境條件、控制指令進(jìn)行測(cè)定和分析,自動(dòng)選擇最佳控制規(guī)律。
(5)具有較高的重復(fù)定位精度,系統(tǒng)剛性好。
(6)不允許有位置超調(diào),否則可能發(fā)生碰撞,動(dòng)態(tài)響應(yīng)要快。
考慮到工業(yè)機(jī)器人控制具有以上特點(diǎn),在設(shè)計(jì)工業(yè)機(jī)器人控制系統(tǒng)時(shí)必須滿足如下基本要求:
(1)多軸運(yùn)動(dòng)的協(xié)調(diào)控制,以產(chǎn)生要求的工作軌跡。
(2)較高的位置精度,很大的調(diào)速范圍。
(3)系統(tǒng)的靜差率要小,即要求系統(tǒng)具有較好的剛性。
(4)位置無超調(diào),動(dòng)態(tài)響應(yīng)快。
(5)需采用加減速控制。
(6)各關(guān)節(jié)的速度誤差系數(shù)應(yīng)盡量一致。
(7)從操作的角度看,要求控制系統(tǒng)具有良好的人機(jī)界面,盡量降低對(duì)操作者要求。
(8)從系統(tǒng)的成本角度看,要求盡可能地降低系統(tǒng)的硬件成本,更多的采用軟件伺服的方法來完善控制系統(tǒng)的性能[3]。
2)工業(yè)機(jī)器人控制方式
? 從工業(yè)機(jī)器人的控制特點(diǎn)和控制要求出發(fā),實(shí)現(xiàn)工業(yè)機(jī)器人的控制涉及諸多內(nèi)容,主要分為機(jī)器人的底層控制與上層控制。其中,底層控制包括機(jī)器人本體(即機(jī)械部分)、驅(qū)動(dòng)電路部分、傳感器部分以及控制策略(如PID控制)等。上層控制包括機(jī)器人的運(yùn)動(dòng)分析、路徑規(guī)劃以及機(jī)器人的軟件部分[4]。根據(jù)不同的分類方法,機(jī)器人控制方式可以有不同的分類。按照被控對(duì)象可以分為位置控制、速度控制、力控制、力矩控制、力/位混合控制等[5],這些主要是底層控制,現(xiàn)對(duì)主要控制方式加以說明。
(1)工業(yè)機(jī)器人位置控制:目的是要使機(jī)器人各關(guān)節(jié)實(shí)現(xiàn)預(yù)先所規(guī)劃的運(yùn)動(dòng),最終保證工業(yè)機(jī)器人末端執(zhí)行器沿預(yù)定的軌跡運(yùn)行,通常采用交流伺服系統(tǒng)或直流伺服系統(tǒng)實(shí)現(xiàn)。
(2)工業(yè)機(jī)器人力(力矩)控制:需要分析機(jī)器人末端執(zhí)行器與環(huán)境的約束狀態(tài),并根據(jù)約束條件制定控制策略。此外,還需要在機(jī)器人末端安裝力傳感器,用來檢測(cè)機(jī)器人與環(huán)境的接觸力。控制系統(tǒng)根據(jù)預(yù)先制定的控制策略對(duì)這些力信息作出處理后,控制機(jī)器人在不確定環(huán)境下進(jìn)行與該環(huán)境相適應(yīng)的操作,從而使機(jī)器人完成復(fù)雜的作業(yè)任務(wù)。
(3)工業(yè)機(jī)器人速度控制:通常與位置控制同時(shí)實(shí)現(xiàn)。例如,在連續(xù)軌跡控制方式的情況下,工業(yè)機(jī)器人需要按預(yù)定的指令來控制運(yùn)動(dòng)部件的速度和實(shí)行加、減速,以滿足運(yùn)動(dòng)平穩(wěn)、定位準(zhǔn)確的要求。由于工業(yè)機(jī)器人是一種工作情況(或行程負(fù)載)多變、慣性負(fù)載大的運(yùn)動(dòng)機(jī)械,要處理好快速與平穩(wěn)的矛盾,必須控制起動(dòng)加速和停止前的減速這兩個(gè)過渡運(yùn)動(dòng)區(qū)段。而在整個(gè)運(yùn)動(dòng)過程中,速度控制通常情況下也是必須的。
3)工業(yè)機(jī)器人智能控制
工業(yè)機(jī)器人的智能控制方式主要指在不確定或未知條件下作業(yè),機(jī)器人需要通過傳感器獲得周圍環(huán)境的信息,根據(jù)自己內(nèi)部的知識(shí)庫做出決策,進(jìn)而對(duì)各執(zhí)行機(jī)構(gòu)進(jìn)行控制,自主完成給定任務(wù),屬于機(jī)器人的上層控制。若采用智能控制技術(shù),機(jī)器人會(huì)具有較強(qiáng)的環(huán)境適應(yīng)性及自學(xué)習(xí)能力。智能控制方法與人工神經(jīng)網(wǎng)絡(luò)、模糊算法、遺傳算法、專家系統(tǒng)等人工智能的發(fā)展密切相關(guān)。現(xiàn)以神經(jīng)網(wǎng)絡(luò)算法在移動(dòng)機(jī)器人中的應(yīng)用為例來闡述智能控制與工業(yè)機(jī)器人的結(jié)合。
以圖中所示移動(dòng)機(jī)器人為例,攝像機(jī)安裝在移動(dòng)機(jī)器人的上方,獲取障礙物的三維圖像。超聲波傳感器組安裝在移動(dòng)機(jī)器人的前方(攝像機(jī)的正下方),獲取障礙物與移動(dòng)機(jī)器人之間的距離信息,如圖4所示。
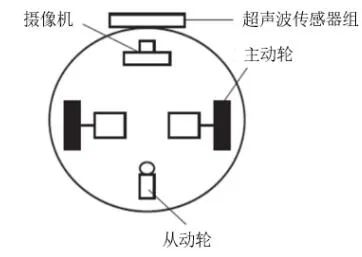
? ? 圖4?多傳感器布置圖
利用神經(jīng)網(wǎng)絡(luò)方法進(jìn)行視覺和超聲波傳感器信息融合,并輸出到下一級(jí),識(shí)別出障礙物的類型,這樣使移動(dòng)機(jī)器人在不確定的環(huán)境中行走時(shí)能夠避障,提高其導(dǎo)航能力。 工業(yè)機(jī)器人利用智能信息進(jìn)行綜合決策避開障礙物的主要步驟如下:
(1)在機(jī)器人行進(jìn)的同時(shí),測(cè)距系統(tǒng)每隔一個(gè)很短的時(shí)間進(jìn)行一次環(huán)境探測(cè),根據(jù)超聲波傳感器獲得的有關(guān)障礙物的距離信息,判斷移動(dòng)機(jī)器人是否需要減速,以及是否需要從CCD攝像機(jī)取樣。
(2)當(dāng)測(cè)距系統(tǒng)探測(cè)到障礙物距移動(dòng)機(jī)器人的距離為中等時(shí),降低機(jī)器人的速度;當(dāng)障礙物距移動(dòng)機(jī)器人的距離為近時(shí),從CCD攝像機(jī)獲取有關(guān)障礙物的二維圖像,并提取其左右邊緣的坐標(biāo)。
(3)將超聲波傳感器和CCD攝像機(jī)獲得的有關(guān)障礙物的信息進(jìn)行分組及預(yù)處理,送入BP神經(jīng)網(wǎng)絡(luò)控制器進(jìn)行融合。
(4)預(yù)先經(jīng)過避障知識(shí)學(xué)習(xí)的BP神經(jīng)網(wǎng)絡(luò)控制器根據(jù)外部多傳感器采集的信息,作出相應(yīng)的避障決策,避開障礙物。
參考文獻(xiàn)
[1] 朱洪前.工業(yè)機(jī)器人技術(shù)[M].北京:機(jī)械工業(yè)出版社,2019. [2] 陳萬米.機(jī)器人控制技術(shù)[M].北京:機(jī)械工業(yè)出版社,2017. [3] 郭彤穎,安冬.機(jī)器人學(xué)及其智能控制[M].北京:人民郵電出版社,2014. [4] 張憲民.機(jī)器人技術(shù)及其應(yīng)用[M].北京:機(jī)械工業(yè)出版社,2017. [5]?張新星.工業(yè)機(jī)器人應(yīng)用基礎(chǔ)[M].北京:北京理工大學(xué)出版社,2017.
?
編輯:黃飛








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論