 電子發燒友App
電子發燒友App


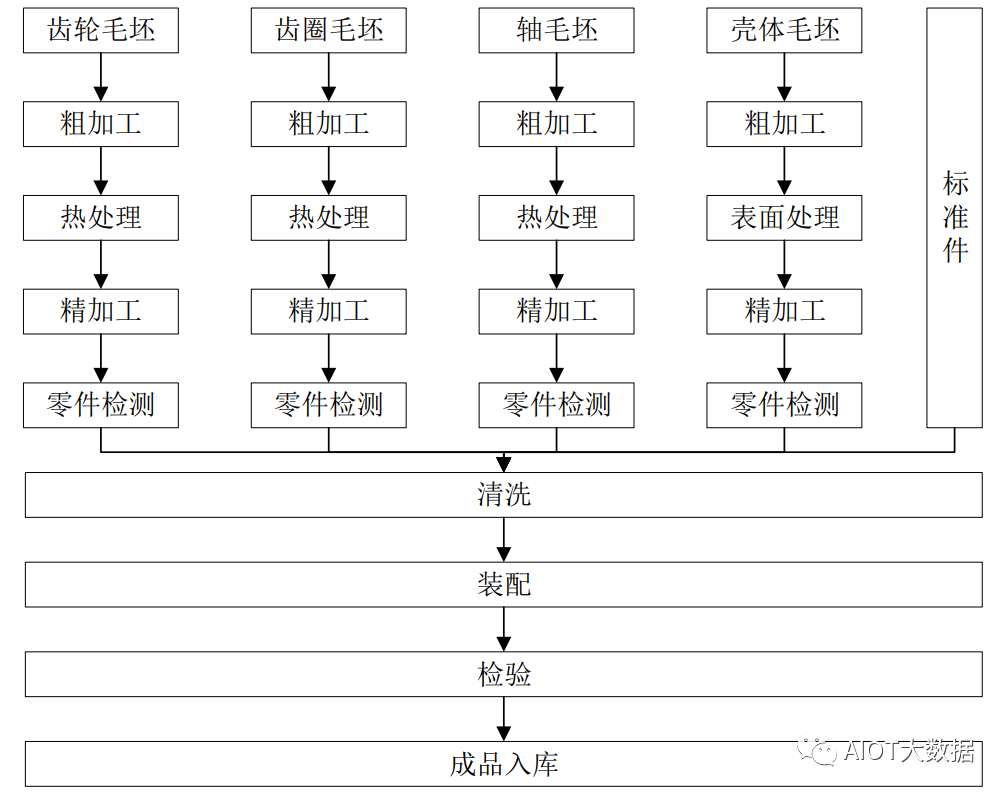
行星減速器生產流程
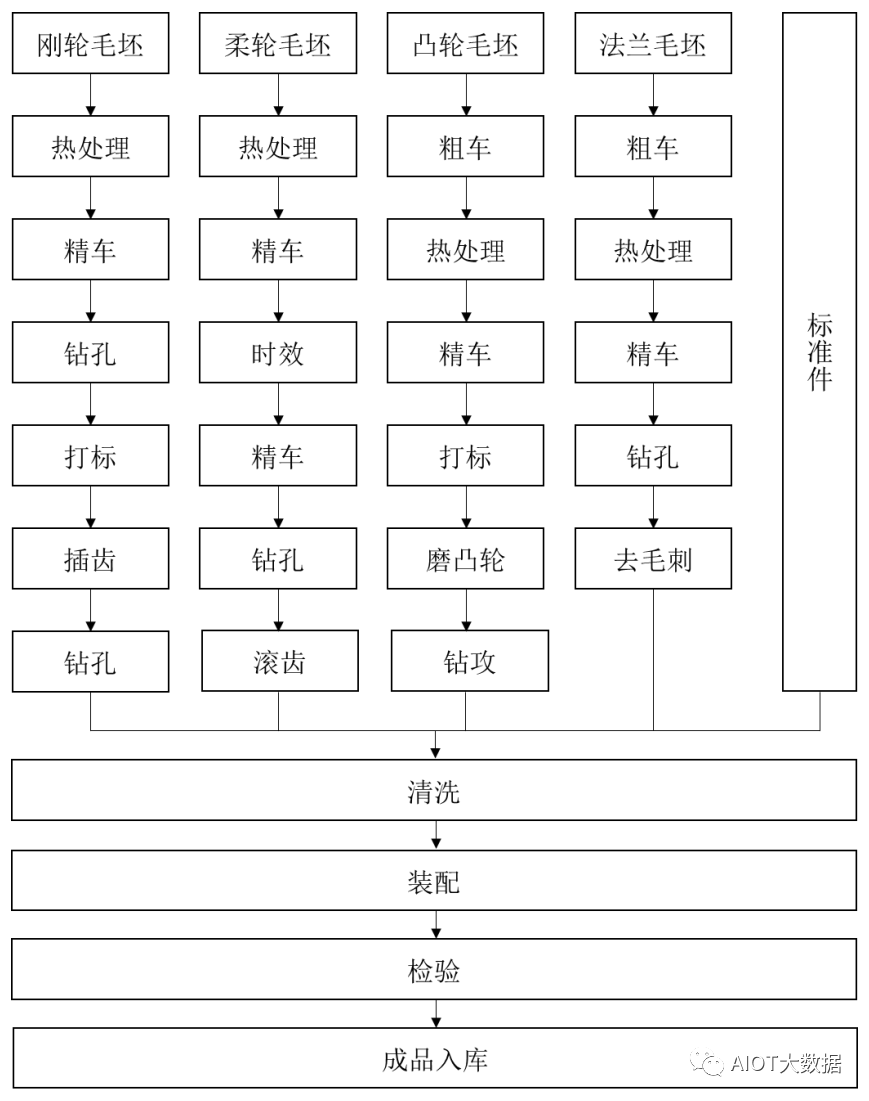
諧波減速器生產流程
技術特點
1、行星減速器行業
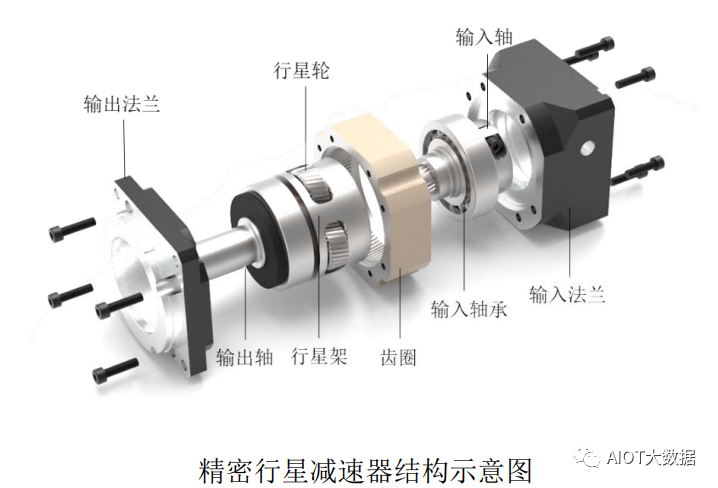
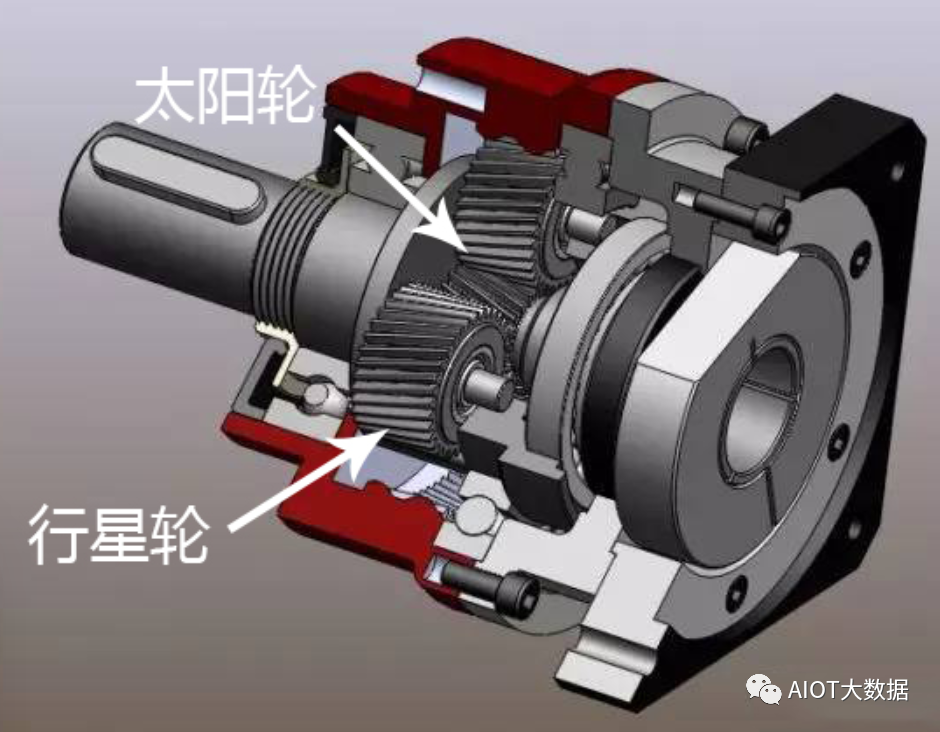
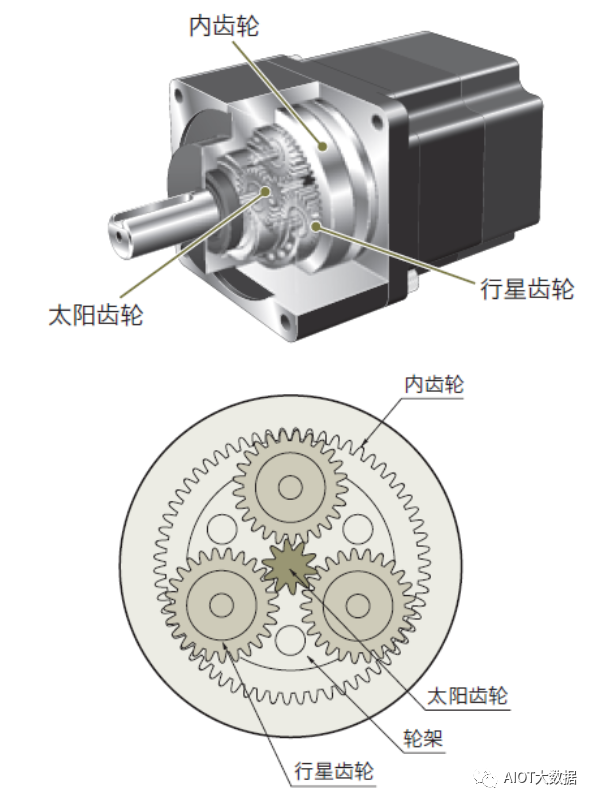
行星齒輪傳動機構主要由行星齒輪、行星架和太陽輪構成的行星齒輪傳動機構。行星齒輪傳動結構是傳動效率最高的齒輪傳動結構。精密行星減速器工作時,通常是伺服電機等原動機驅動太陽輪旋轉,太陽輪與行星輪的嚙合驅動行星輪產生自轉;同時,由于行星輪另外一側與減速器殼體內壁上的環形內齒圈嚙合,最終行星輪在自轉驅動下將沿著與太陽輪旋轉相同方向在環形內齒圈上滾動,形成圍繞太陽輪旋轉的“公轉”運動。行星輪通過公轉驅動行星架旋轉,行星架與輸出軸聯接,帶動輸出軸輸出扭矩。通常,每臺精密行星減速器都會有多個行星輪,它們會在輸入軸和太陽輪旋轉驅動下,同時圍繞太陽輪旋轉,共同輸出動力,帶動負載運動。太陽輪和齒圈存在齒數差,從而達到減速目的。
由于結構原因,單級行星減速器減速比一般不小于3,最大一般不超過10,常見減速比為3、4、5、6、7、8、9、10;行星減速器一般不超過3級。
根據《微電機用齒輪減速器通用技術條件》(GB/T11281—2009),一般傳動用減速器空載空程小于等于3°即為精密類減速器,伺服(精密控制)用減速器,傳動精度小于等于15′即為精密類減速器。在行星減速器行業中,德國的斯德博、威騰斯坦等企業產品在傳動精度、保持高精度的使用壽命、產品一致性等方面具備領先優勢。國際領先的單級精密行星減速器的精度可在1′以內,保持高精度的穩定使用壽命達到2萬小時,且產品一致性較高。國內行星減速器企業已具備生產全型號產品的能力,正在向高精度、輕量化、高功率密度、模塊化、集成化、智能化方向發展。
級數:行星齒輪的套數。由于一套行星齒輪無法滿足較大的傳動比,有時需要2套或者3套來滿足擁護較大的傳動比的要求。由于增加了行星齒輪的數量,所以2級或3級減速機的長度會有所增加,效率會有所下降。
行星減速機因為結構原因,單級減速最小為3,最大一般不超過10,常見減速比為:3、4、5、6、8、10,減速機級數一般不超過3,但有部分大減速比定制減速機有4級減速。
?
回程間隙:將輸出端固定,輸入端順時針和逆時針方向旋轉,使輸入端產生額定扭矩+-2%扭矩時,減速機輸入端有一個微小的角位移,此角位移就是回程間隙。單位是“分”,就是一度的六十分之一,也有人稱之為背隙。
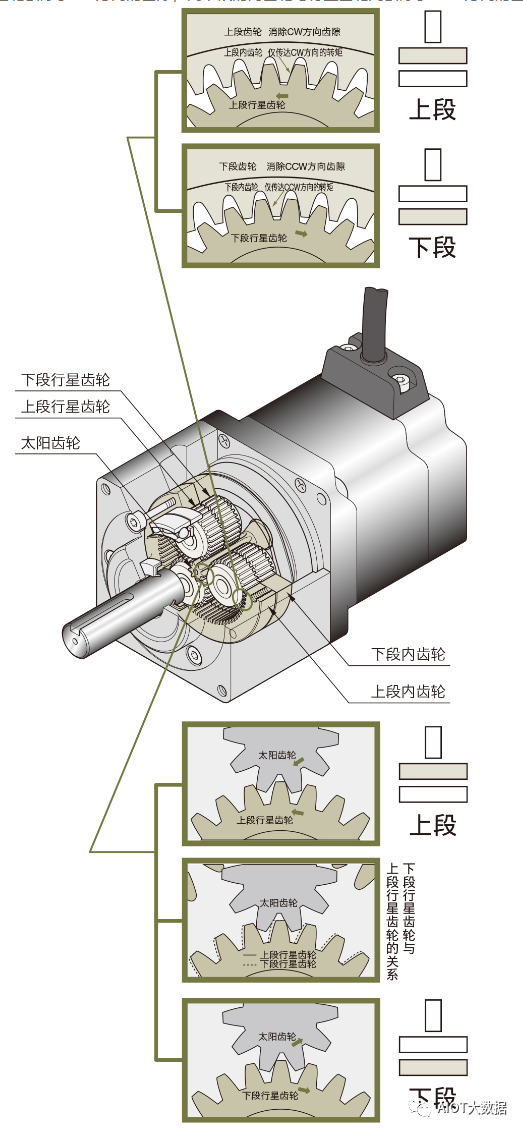
為使各零件的加工精度提高,采用了齒隙去除機構,實現了規格值3分以內的齒隙。齒隙去除機構是將內齒輪及行星齒輪分別配置成上下兩段,并將內齒輪朝圓周方向擰動。因此,上段的內齒輪與行星齒輪去除了CW方向的齒隙,而下段的內齒輪與行星齒輪則去除了CCW方向的齒隙。
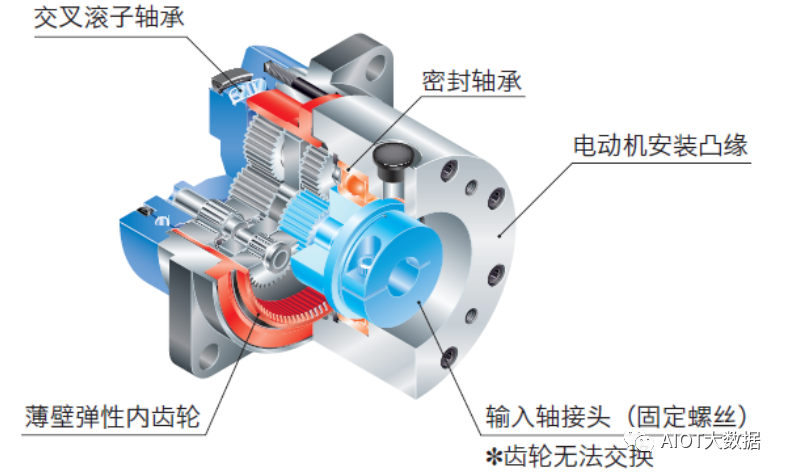
將薄壁彈性齒輪技術運用到行星齒輪減速機內齒輪的行星齒輪減速裝置。因此,利用內齒輪的彈性變形,在沒有調整機構的情況下實現了小齒隙。
行星齒輪減速機是太陽齒輪與行星齒輪、行星齒輪與內齒輪都同時相互嚙合的構造。因此,如果只用零件的尺寸精度減少齒隙,則會受到尺寸誤差的影響而干擾嚙合部分,可能導致旋轉轉矩不均勻或產生噪音。為解決此類問題,開發了緩和嚙合部分干擾的功能及兼備足夠強度的“薄壁彈性內齒輪”,誕生了劃時代性構造的行星齒輪減速機,在減速機的使用壽命范圍內幾乎沒有齒隙變化。
RV減速器
RV減速器,簡稱旋轉矢量(RotaryVector)減速器,包括前級的行星齒輪減速器,與后級的擺線針輪減速器,應用場景主要為工業機器人、數控機床、醫療檢測設備、衛星接收系統等。
構造及工作過程
RV減速器通常包含兩級減速裝置,
具體圖示如下:
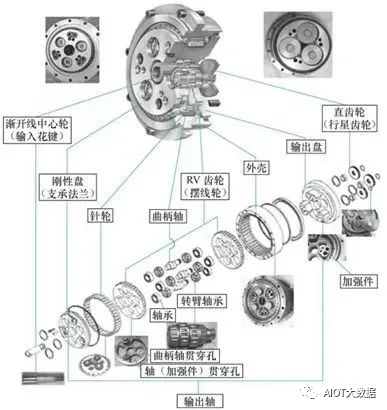
(一)第一級減速裝置為行星齒輪減速器,由輸入齒輪和行星輪組成。其運動原理如下:
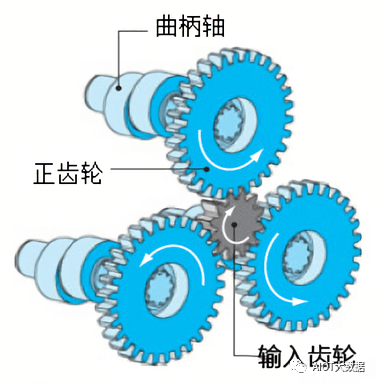
第一,輸入齒輪與電機相連,在電機的旋轉作用下,輸入齒輪隨之同步旋轉,輸入齒輪與電機的轉速保持一致;第二,輸入齒輪轉動帶動2-3個行星輪同時轉動,由于行星輪的齒數較多、形狀較大,因此行星輪的轉動速度慢于輸入齒輪,實現第一級減速,一級減速比為行星輪與輸入齒輪的齒數之比;
(二)曲柄軸前后端分別與行星輪和擺線輪相連,在行星輪旋轉后,曲柄軸以相同的轉速旋轉;
(三)第二級減速裝置為擺線針輪減速器,主要由滾動軸承、擺線輪、針輪組成,其運動原理如下:
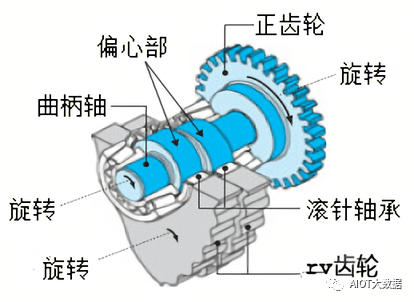
第一,如上圖所示,曲柄軸上含有偏心部,偏心部外嵌滾針軸承,與滾動軸承相連接,在曲柄軸的偏心運動下,擺線輪在滾動軸承的作用下隨之運動;
第二,某品牌的RV減速器通常采用“2-3個偏心部+擺線輪”的設計,擺線輪間存在一定相位差,2個擺線輪相位差為180度,3個擺線輪相位差為120度,用于抵消運動過程中的徑向跳動,提升精度的同時,提高安全系數和抗沖擊強度;
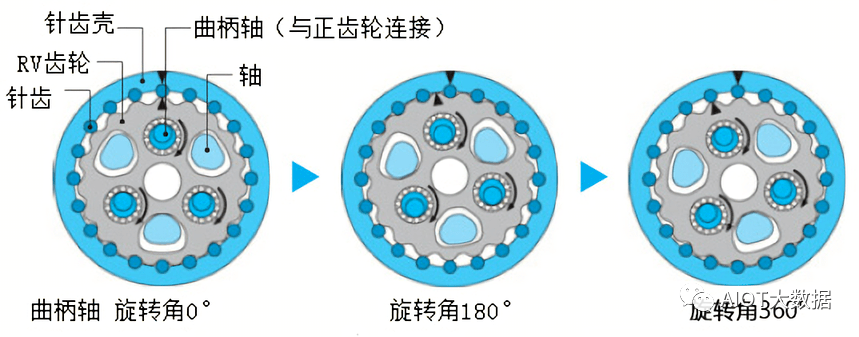
第三,在外殼內側僅比擺線輪多一個齒的針輪,以與擺線輪同等的齒距排列。曲柄軸旋轉一圈,擺線輪與針輪接觸的同時,做一次偏心運動(曲柄運動),在針輪保持固定的結果上,沿著與曲柄軸的旋轉方向相反的方向,擺線輪旋轉一個齒輪距離,因此擺線輪旋轉速度慢于曲柄軸的偏心部,實現第二級減速。
RV與諧波減速器對比
機器人RV減速器可承受的扭矩較大、結構剛性好,但精度要低于諧波減速器。因此在工業機器人的應用中,RV減速器一般用在重負載的位置,如機座、大臂、肩部等,而將諧波減速器放置在小臂、腕部或手部,其中協作機器人的六軸均為諧波減速器。
行星減速機優點:
(1)、傳動速比大。行星減速機的齒輪嚙合傳動有多組,齒輪組數量較多,傳動速比相應增大。
(2)、承載能力高。這是因為減速機有許多齒同時嚙合齒輪傳動,齒條使用的材料強度很高。經過精密加工,有效提高了行星減速器的整體承載能力。
(3)、傳動精度高。齒輪間嚙合精度較高,可小于1弧分。相對于其他類型的減速機來說,它屬于高精度減速機。
(4)、效率高,動作平穩。
由于齒輪減速機中的每組齒輪在減速時只咬合單齒面,因此在傳遞扭矩相等的情況下,齒面應力要求更大。因此,擋位設計時必須采用較大的模數及厚度。齒輪模數越大,齒輪間的撓曲公差值就會越大,形成的齒輪間隙就越高,各減速比之間積累的側隙就會增大。而精密的行星減速機組合特有的多點均勻緊配合結構和外齒圈圓弧結構,使外齒圈與行星齒輪結合緊密,具有較高的齒輪間的緊密配合度。除了提高減速機的效率,設計本身還可以實現高精度定位。
(5)、行星減速機有三個基本組成部分:結構簡單,零件少,安裝方便,輸入輸出軸同軸,所以結構簡單,安裝方便。
(6)、精密行星減速器體積小、重量輕、外形輕盈。
這些特點讓設計變得更有價值。在傳統的齒輪減速裝置中,多組大小齒輪通過偏置交錯傳動來降低轉速。減速比是由兩個齒輪的個數倍數產生的,大小齒輪之間拉開一定距離。因此變速箱的容納空間巨大。尤其是在高轉速比組合的情況下,需要兩個以上的減速齒輪箱進行組合連接。結構強度相對減弱,變速箱長度加長,造成體積特別大,重量也特別大。行星減速機的結構可以根據所需的段數重復連接,也可以單獨完成多段組合。
(7)、行星減速機能將動輪傳動傳遞到有限空間的優勢,是其他現有傳動裝置所不能比擬的。
(8)、高扭矩及抗沖擊能力。傳統的齒輪僅靠兩個齒輪之間的少數接觸面的擠壓來驅動,所有的載荷都集中在少數接觸面上,所以齒輪之間很容易產生摩擦,出現斷裂。行星減速機在齒輪接觸面上有6個較大面積的360度均勻載荷,行星減速機的多個齒面共同均勻地承受瞬時沖擊載荷,使行星減速機承受扭力更大的沖擊,不會因載荷過大而使主體和軸承部件發生損壞或開裂。
行星減速機缺點:
(1)、普通行星齒輪減速裝置采用直齒輪。直齒輪的主要缺點是運轉過程中會有震動,這是無法避免的。改變設計,制造材料或變形等措施都是避免不了的。同時,漸開線的齒廓沿著整個齒面可能會有一些變化。這就造成了一個規律的無解問題,每顆齒的接觸都會發生。所以產生的震動會對齒輪產生很大的負荷,同時也會產生噪音。
(2)、另一個缺點是有時通過兩對齒嚙合而得到的額外強度,在齒對齒接觸的過程中無法被利用。由于應力受制于循環中單個齒的嚙合作用,會浪費能量。這一問題有望在今后得到改善。
(3)、另外,行星減速機相對于普通減速機價格會貴一些,一般對精度沒有要求的行業,可以選擇其他類型的減速機。
2、諧波減速器行業
諧波齒輪減速器是一種靠波發生器使柔輪產生可控的彈性變形波,通過其與剛輪的相互作用,實現運動和動力傳遞的傳動裝置,其構造主要由帶有內齒圈的剛性齒輪(剛輪)、帶有外齒圈的柔性齒輪(柔輪)、波發生器三個基本構件組成。
諧波減速器工作時,通常采用波發生器主動、剛輪固定、柔輪輸出形式,由電機帶動波發生器轉動,柔輪作為從動輪,輸出轉動,帶動負載運動。
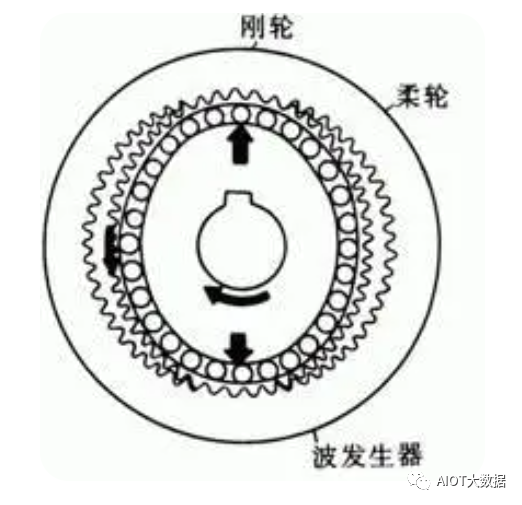
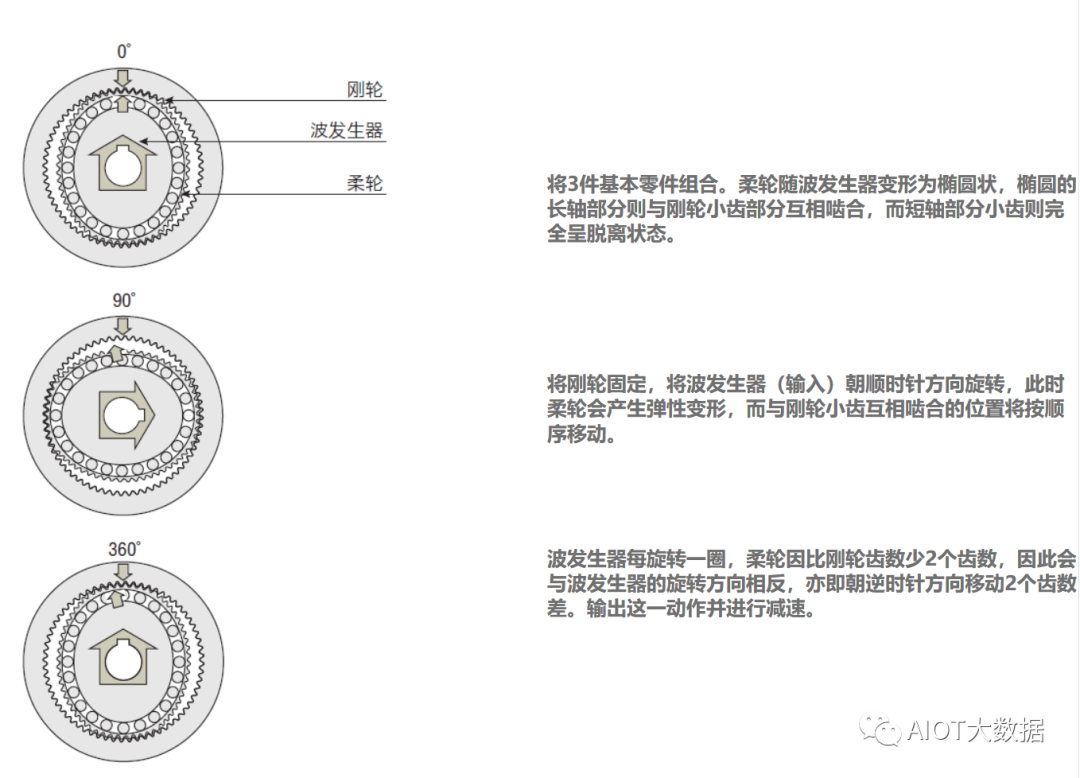
當波發生器裝入柔輪后,迫使柔輪的剖面由原先的圓形變成橢圓形,其長軸兩端附近的齒與剛輪的齒完全嚙合,而短軸兩端附近的齒則與剛輪完全脫開。周長上其他區段的齒處于嚙合和脫離的過渡狀態。當波發生器沿某一方向連續轉動時,柔輪的變形不斷改變,使柔輪與剛輪的嚙合狀態也不斷改變,由嚙入、嚙合、嚙出、脫開、再嚙入?,周而復始地進行,從而實現柔輪相對剛輪,沿波發生器相反方向的緩慢旋轉。

根據《機器人用諧波齒輪減速器》(GB/T30819-2014)國家標準,諧波減速器的精度等級根據其傳動誤差分為普通級、精密級和高精密級,具體如下:

在工作時,例如如果撓性花鍵有200個齒,波形發生器必須旋轉100圈,柔輪花鍵才能前進200個齒,或者柔輪花鍵只能旋轉一圈。這是100:1的比例。在這種情況下,圓弧花鍵將有202個齒,因為圓弧花鍵的齒數總是比撓性花鍵的齒數多兩個。
我們可以用下面的公式很容易地計算出減速比。該比率等于撓性花鍵齒–圓形花鍵齒除以撓性花鍵齒。
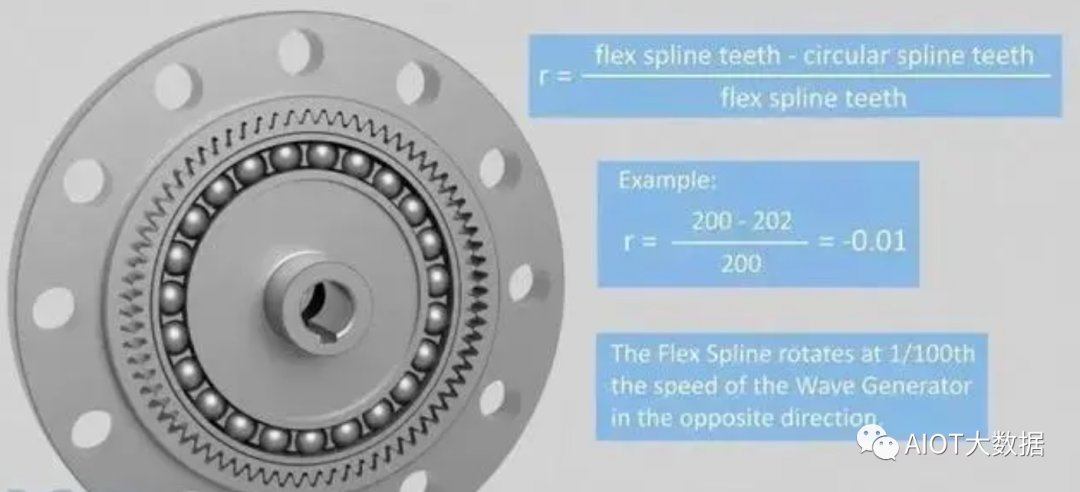
因此,以撓性花鍵上的200個齒和圓形花鍵上的202個齒為例,減速比為-0.01。這是波發生器速度的1/100,減號表示輸出方向相反。通過改變齒數,我們可以得到不同的減速比。
精度
諧波減速機與使用一般直齒輪的減速機不同,沒有齒隙(小齒互相嚙合間隙)。同時,相互嚙合的齒數較多,小齒的齒距誤差或累積齒距誤差的旋轉精度的影響被平均分散掉,可發揮高定位精度的特性。此外,諧波減速機的減速比較高,因此,在輸出軸施加負載轉矩時的扭轉,即使與電動機單體及其它減速電動機相比,也會非常小,且具有高剛性。由于剛性較高,因此,即使負載變動大,也可以非常穩定的定位。對要求較高的定位精度及剛性時,請參考以下特性。
角度傳動精度
是指從輸入脈沖數計算出輸出軸的理論旋轉角度與實際旋轉角度的誤差。表示從任意位置測量輸出軸旋轉1次時誤差的最小值與最大值的幅度。
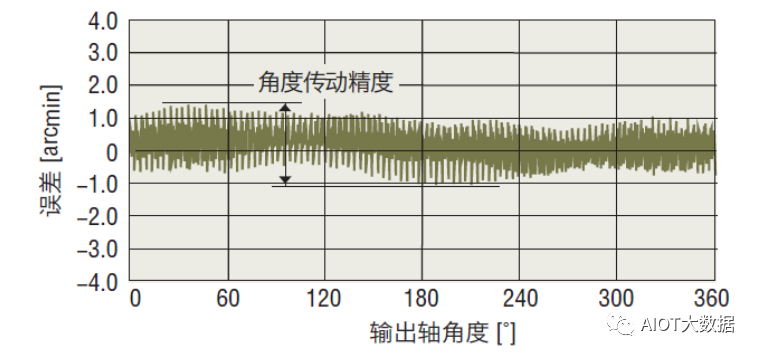
這是無負載條件下的值(減速機部參考值)。但是,實際的用途上必然產生摩擦負載,出現與摩擦負載相應的變位。當摩擦負載一定時,若朝同一方向運行則變位固定,但若從正反兩方向運行,則往返間將產生兩倍的變位。該變位可通過下面的轉矩―扭轉特性來推測。
轉矩―扭轉特性
圖表中的轉矩―扭轉特性是將電動機軸進行固定,然后慢慢朝正反方向向輸出軸施加或減少負載(轉矩)時的變位(扭轉)圖。如上所述,向輸出軸施加負載時,會因減速機的彈簧常數的關系而產生變位。
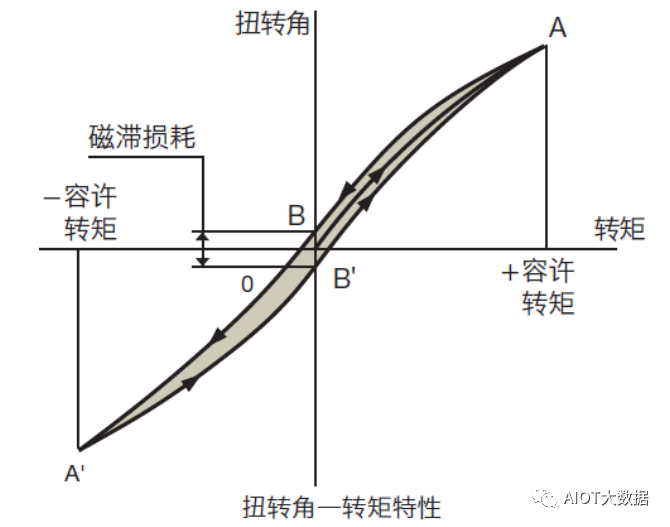
該變位在停止時施加外力及在施加了摩擦負載的狀態下進行驅動的情況下會發生。該傾斜率可根據負載轉矩的大小,使用以下3個區間的彈簧常數算出近似值,或通過計算進行推定。
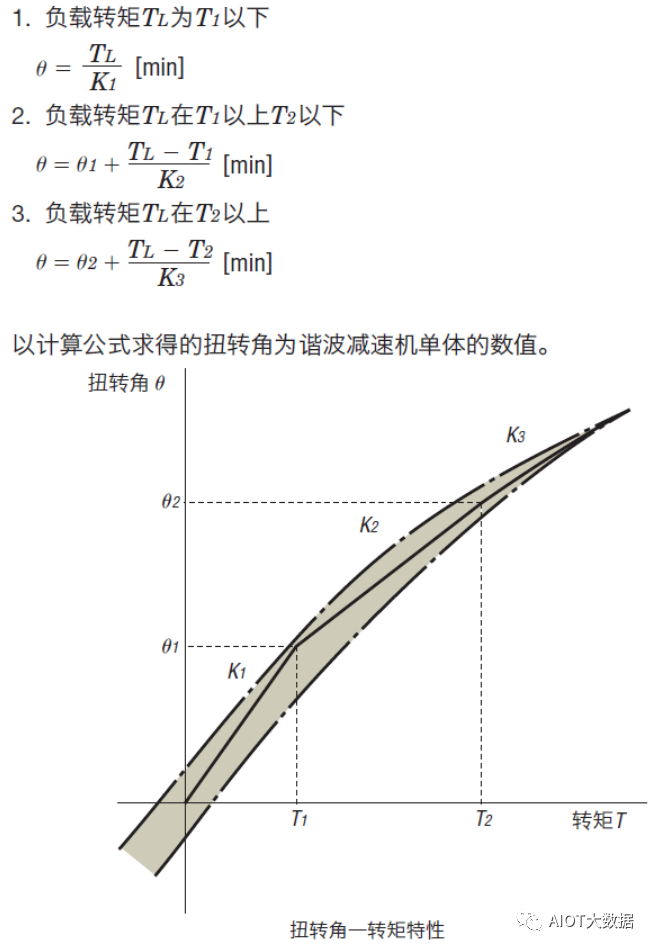
磁滯損耗
從轉矩―扭轉特性可以看出,朝正反方向施加轉矩到容許轉矩后,即使將轉矩減少為0,扭轉角也不會完全變回0,仍殘留有一點扭轉。(圖B-B’)這就是磁滯損耗,該磁滯損耗設計在2分以內。停止時施加外力、通過慣性驅動施加加減速轉矩、驅動中施加摩擦負載等時,即使將負載降為0,在此磁滯損耗作用下,有時仍會殘留有稍許扭轉。
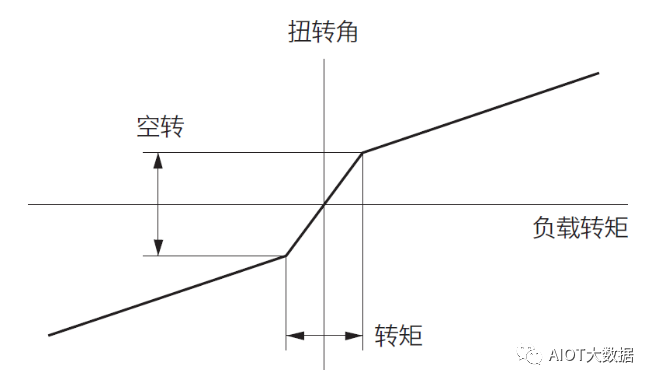
空轉
諧波減速機完全沒有齒隙,因此減速機的精度則以空轉作為其基準值。空轉是減速機輸出軸施加容許轉矩的約5%的轉矩時,所產生變位的合計值。
優點
1、傳動速比大。
單級諧波齒輪傳動速比范圍為70~320,在某些裝置中可達到1000,多級傳動速比可達30000以上。它不僅可用于減速,也可用于增速的場合。
2、承載能力高。
這是因為諧波齒輪傳動中同時嚙合的齒數多,雙波傳動同時嚙合的齒數可達總齒數的30%以上,而且柔輪采用了高強度材料,齒與齒之間是面接觸。
3、傳動精度高。
這是因為諧波齒輪傳動中同時嚙合的齒數多,誤差平均化,即多齒嚙合對誤差有相互補償作用,故傳動精度高。在齒輪精度等級相同的情況下,傳動誤差只有普通圓柱齒輪傳動的1/4左右。同時可采用微量改變波發生器的半徑來增加柔輪的變形使齒隙很小,甚至能做到無側隙嚙合,故諧波齒輪減速機傳動空程小,適用于反向轉動。
4、傳動效率高、運動平穩。
由于柔輪輪齒在傳動過程中作均勻的徑向移動,因此,即使輸入速度很高,輪齒的相對滑移速度仍是極低(故為普通漸開線齒輪傳動的百分之—),所以,輪齒磨損小,效率高(可達69%~96%)。又由于嚙入和嚙出時,齒輪的兩側都參加工作,因而無沖擊現象,運動平穩。
5、結構簡單、零件數少、安裝方便。
僅有三個基本構件,且輸入與輸出軸同軸線,所以結構簡單,安裝方便。
6、體積小、重量輕。
與一般減速機比較,輸出力矩相同時,諧波齒輪減速機的體積可減小2/3,重量可減輕1/2。
7、可向密閉空間傳遞運動。
利用柔輪的柔性特點,輪傳動的這一可貴優點是現有其他傳動無法比擬的。
缺點
1、柔輪周期性地發生變形,因而產生交變應力,使之易于產生疲勞破壞。
2、轉動慣量和起動力矩大,不宜用于小功率的跟蹤傳動。
3、不能用于傳動速比小于35的場合。
4、采用滾子波發生器(自由變形波)的諧波傳動,其瞬時傳動比不是常數。
5、散熱條件差。
應用場合
諧波齒輪減速機在航空、航天、能源、航海、造船、仿生機械、常用軍械、機床、儀表、電子設備、礦山冶金、交通運輸、起重機械、石油化工機械、紡織機械、農業機械以及醫療器械等方面得到日益廣泛的應用,特別是在高動態性能的伺服系統中,采用諧波齒輪傳動更顯示出其優越性。它傳遞的功率從幾十瓦到幾十千瓦,但大功率的諧波齒輪傳動多用于短期工作場合。
在諧波減速器行業中,日本的哈默納科、日本新寶等企業技術水平處于行業領先地位。國際領先的諧波減速器傳動精度在30"以內,傳動效率可達到75%以上,使用壽命在1萬小時左右。國內部分企業通過技術攻關、生產工藝的改進,研發出的產品在性能和穩定性等方面已能夠達到國際先進水平,打破了國外的技術壟斷,對國外品牌進口逐漸形成一定的替代。
行業競爭格局
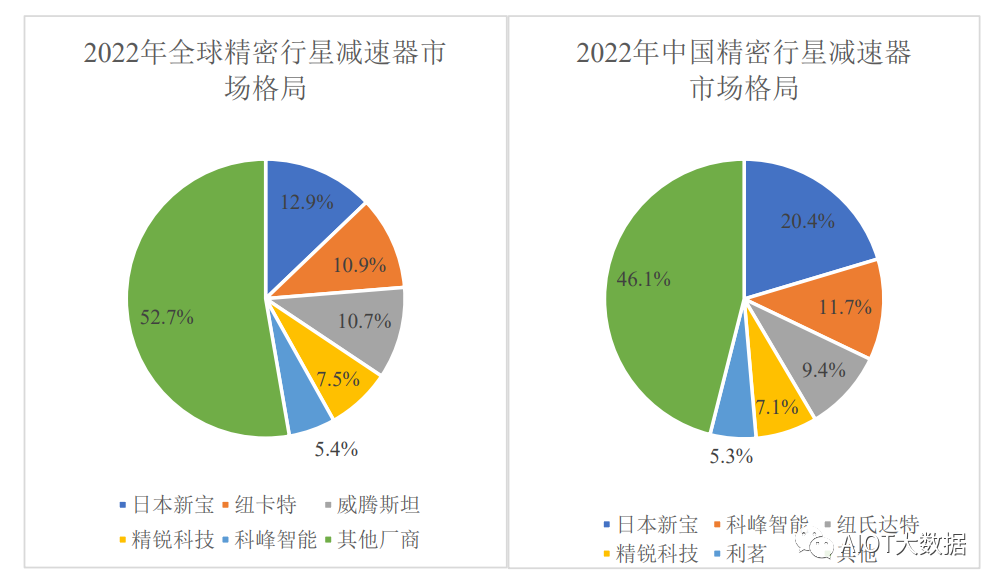
1、精密行星減速器行業競爭格局
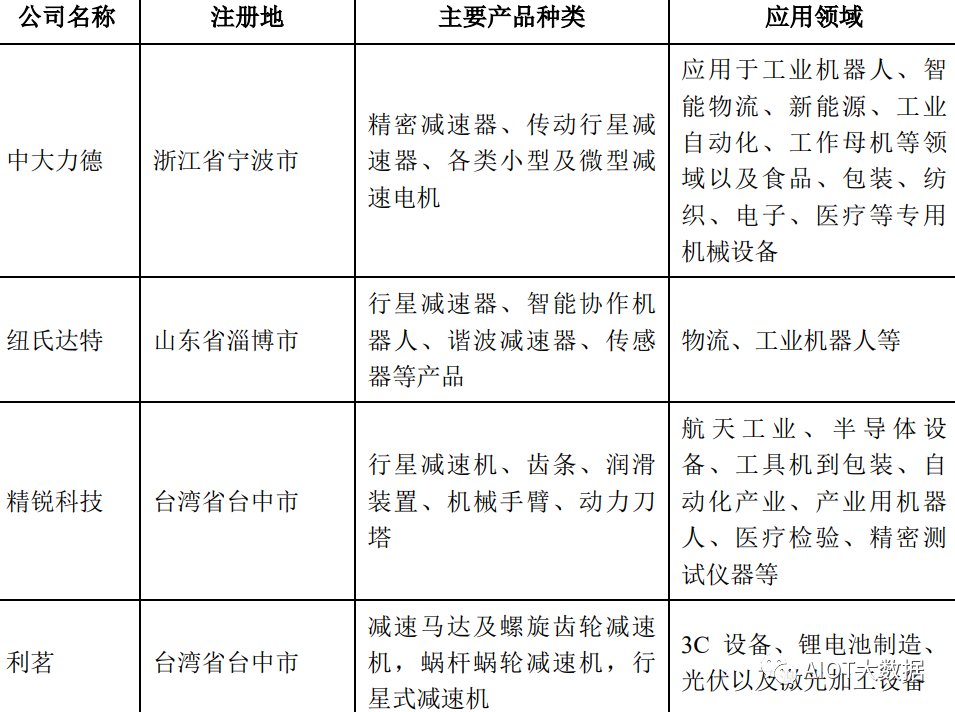
在全球范圍內,德國、日本等國家的精密行星減速器產品在材料、設計水平、質量控制、精度、可靠性和使用壽命等方面處于行業領先地位。精密行星減速器國產品牌陣營以公司、紐氏達特、中大力德為主要代表,國外精密行星減速器主要廠家為日本新寶、紐卡特、威騰斯坦等。在精密行星減速器領域,由于其技術含量高,生產工藝復雜,存在較高的進入壁壘,目前市場主要參與者為外資廠商、合資廠商,高端精密行星減速器國產化率很低。以公司為代表的國內精密行星減速器龍頭企業,經過多年的技術積累,已開發出與國際先進水平相當的高端精密行星減速器產品,國產品牌陣營市場號召力和品牌影響力與日俱增。根據QYResearch統計的銷售金額數據,日本新寶、紐卡特、威騰斯坦是全球精密行星減速器市場的主要供應商。日本新寶、科峰智能及紐氏達特是中國精密行星減速器市場的主要供應商,2022年市場占有率分別為20.4%、11.7%、9.4%。
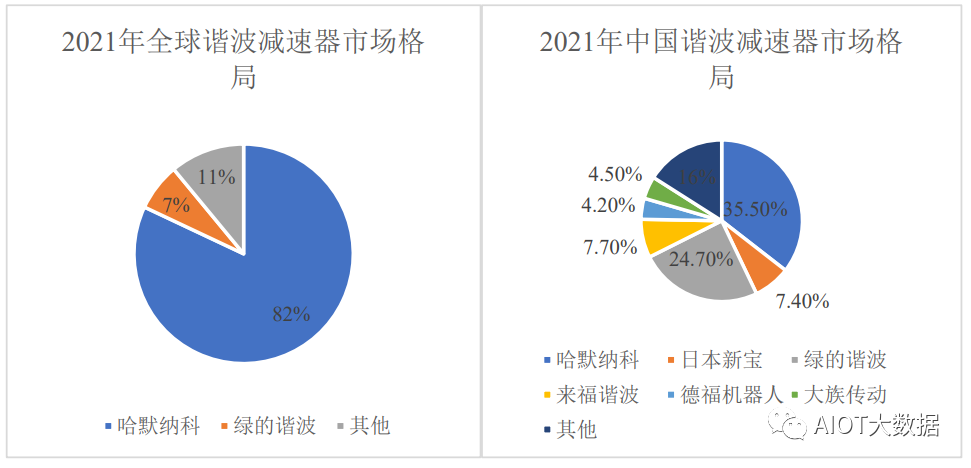
2、諧波減速器行業競爭格局
全球諧波減速機市場較為集中,哈默納科一家獨大。根據安信證券研究中心發布的報告,2021年全球諧波減速器市場內主要參與者有哈默納科、日本新寶、綠的諧波等。其中哈默納科全球市場占有率約82%,綠的諧波占比約7%,其他廠商占比約11%。中國境內諧波減速器的生產企業主要有綠的諧波、來福諧波等。
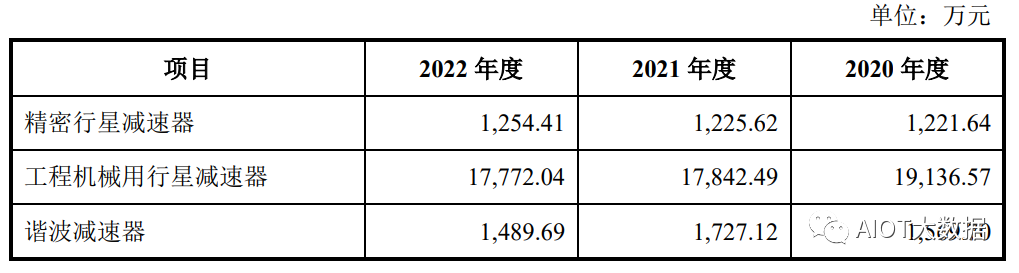
平均銷售價格變動情況
主要原材料平均采購單價及變動情況


編輯:黃飛
?












 工商網監
工商網監
評論