 電子發燒友App
電子發燒友App


工業機器人的發展歷程可以分為三個階段: 技術萌芽階段(20 世紀 50-60 年代,第一代工業機器人):第二次世界大戰期間工業機器 人的雛形始成,其最初是出于軍事、核工業的發展需要,用來滿足代替人類進行放射性物 質處理的遙控機械手。此后,美國發明家喬治·德沃爾最早提出工業機器人的概念并于 1954 年申請“可編輯關節式轉移物料裝置”的專利。1958 年,世界上第一家機器人公司 Unimation 成立,并于 1959 年利用喬治·德沃爾的專利推出了世界上第一臺真正意義上的工業機器人 Unimate,開創了機器人發展的新紀元。在此期間主要為第一代工業機器人,即沒有自主決 策能力和環境感知能力的示教再現型機器人。
產業崛起階段(20 世紀末期,第二代工業機器人):1968 年起,Unimation 先后將機器人 制造技術轉讓給日本川崎、英國 GKN 公司,工業機器人業務擴張到日本和歐洲,開始走向 產業化和全球化。1969 年,ASEA 公司研制出全球首臺噴涂機器人,川崎成功推出了日本 第一臺液壓動力機器人“川崎 Unimate 2000”。此后,更多公司入局工業機器人領域,形 成了以 ABB、庫卡為代表的歐洲機器人企業以及以川崎、發那科、安川為代表的日本機器 人企業格局,機器人市場穩步增長。在此期間,工業機器人從第一代發展到第二代,能夠 感知外界信息并進行簡單的處理和反饋。
產業升級階段(21 世紀初期,第三代工業機器人):隨著工業自動化的發展,工業機器人 不斷拓展應用場景、發展核心技術。1)從應用場景來看,工業機器人能達到更快速度、更 高精準度,以及更大范圍的大小型號和負載,實現在大型工件搬運生產、物流運輸、食品 飲料、生物制藥、汽車制造等更加廣泛和智能的場景應用。2)從技術發展來看,工業機器 人核心技術得到快速發展。2002 年美國波士頓公司和日本公司共同申請了第一臺“機械狗” 智能軍用機器人專利;2004 年安川和 ABB 均開發了可以同步控制多臺機器人的控制器; 2006 年意大利柯馬公司推出了第一款無線示教器;2015 年 ABB 推出世界上第一臺真正意 義上的協作機器人 YuMi。在此期間工業機器人進入第三代,具備智能化特點,可以利用各 種傳感器、測量器獲取信息并利用智能技術進行識別、理解和反饋。
工業機器人四大家族憑借在原有業務的領先優勢和對機器人技術的高度掌握占據高位。以 ABB 的發展歷程為例,公司成立于 1988 年,是由具有百年歷史的兩家著名電氣公司—— 電氣照明和發電機制造商 ASEA 和高壓電氣傳輸公司 BBC 合并而來,此后 ABB 成為了電 氣和自動化領域的技術領導者,提供全面且日益數字化的電氣化、運動和自動化解決方案。 在此基礎之上,ABB 對業務結構進行調整,延續其前身 ASEA 公司在工業機器人領域的領 先布局,開始快速發展機器人業務,自 1974 年推出世界上第一臺微電腦控制的機器人以來, ABB 不斷取得突破性創新,不斷完善工業機器人在產業鏈上的產品布局,并通過技術創新 提升性能。
市場現狀:“四大家族”占據的穩增長市場
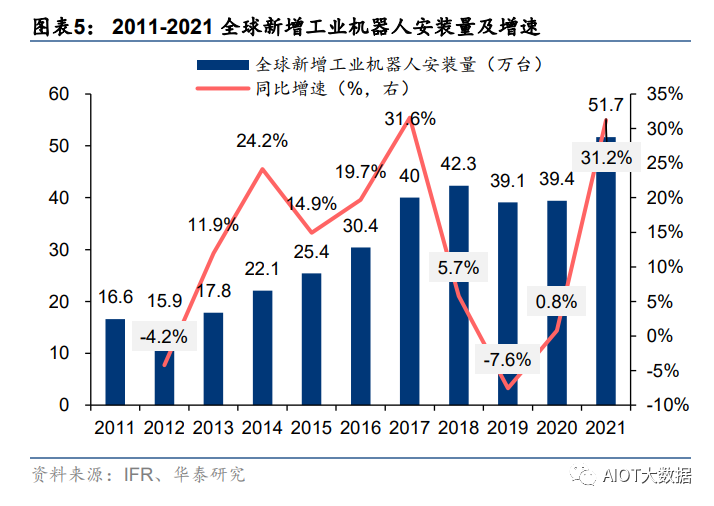
工業機器人市場規模穩步增長,全球新增裝機量快速增長。根據 IFR 數據,2021 年全球新 增工業機器人安裝量為 51.7 萬臺,同比增長 31.2%,2012-2021 年復合增長率為 12.0%。 根據 Inkwood Research 數據,未來全球工業機器人市場規模將保持穩定增長,從 2020 年 的 553.7 億美元增長至 2028 年的 1653.5 億美元,2021-2028 年復合增長率為 14.7%。
工業機器人市場集中度較高,以機器人“四大家族”為主。根據 IFR 數據,2020 年全球工 業機器人市場中,發那科、ABB、安川、庫卡四家占比超過 65%,其中發那科排名第一占 比 17.3%,ABB 第二占比 15.7%,安川和庫卡分別占比 12.9%和 12.1%。“四大家族”的 主要業務和在機器人領域的核心技術各不相同,安川和庫卡以機器人業務為核心,而發那 科和 ABB 則分別起家于工廠自動化設備和電力業務。其中 ABB 的業務以電氣、運動控制、 過程自動化、機器人與離散自動化為核心的,2022 年電氣業務營收占比 47.9%,機器人與 自動化業務占比 10.8%。
驅動力:人口供給收縮和下游需求釋放驅動行業增長
人口老齡化導致人力成本上升,機器替人為大勢所趨。世界各國的生育率已連續多年下降, 據國家統計局,2021 年中國 15-64 歲人口占比已降至 68.3%。企業用人成本不斷攀升,根 據國家統計局數據,2022 年中國制造業就業人員人均工資已達 86933 元,同比增長 5.2%, 高于 GDP 增速。勞動力成本上升的長期趨勢將成為工業機器人產業發展的強大驅動力。
新能源汽車的爆發為工業機器人帶來需求釋放。由于新能源汽車的帶動,汽車行業進入下 一輪擴張周期,工業機器人將持續受益。以中國為例,據同花順數據,從 2021 年起新能源 汽車銷量進入爆發式增長階段,2023 年 6 月銷量超過 80 萬輛。 半導體、光伏、鋰電等行業也有望帶來大量工業機器人需求。汽車與 3C 電子是工業機器人 需求量最大的兩個行業,如今 3C 電子需求相對疲軟,大部分企業開始積極探索汽車和 3C 之外的業績增長點,如半導體、光伏、鋰電等。2022 年全球半導體市場規模達 5735 億美 元,隨著 AI 帶動算力芯片設計、制造、封裝等產業需求,半導體擴產有望帶動工業機器人 建設需求。
IT 架構是智能化核心,軟件重要性有望逐步提升
工業機器人產業鏈:可分為上游核心零部件、中游機器人本體及軟件以及下游系統集成及 應用三個環節。上游核心零部件包括傳感器、控制器、減速器、伺服系統,傳感器主要分 為內部傳感器和外部傳感器,伺服系統主要包括伺服驅動器和伺服電機兩個部件;中游包 括機器人本體制造及配套軟件產品;下游包括系統集成及應用,系統集成即將各種機器人、 傳感器、控制器、軟件等組合以形成一個完整的自動化生產線,工業機器人應用覆蓋廣泛, 其中主要應用領域為汽車制造、電子電氣、食品制造、金屬加工及制藥行業等。
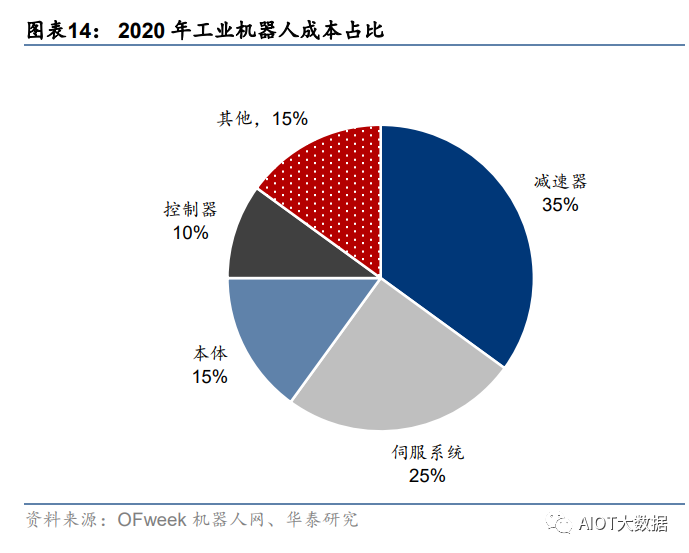
上游核心零部件為工業機器人主要成本來源,盈利能力強勁。從成本來看,2020 年工業機 器人 60%的成本由上游核心零部件構成,其中減速器、伺服系統、控制器分別占比 35%、 25%、10%,機器人本體僅占比 15%。從毛利率來看,盈利能力較強的環節主要集中在上 游核心零部件,2020 年減速器、伺服系統、控制器的毛利率分別約為 40%、35%和 25%, 中游本體制造毛利率較低僅 15%,下游系統集成毛利率較高為 35%。
以 ABB 為例,按照具體功能結構,我們可以將工業機器人核心部件歸納為:感知層、執行 層、決策層。具體來看:
感知層:工業機器人的信息最初來源
傳感器是機器人的“感知器官”,是機器人實現與環境交互及精準運動的信息來源。傳感器 用來感應和采集各種信息,并按照一定規律將被測量的信息轉化成便于傳輸和處理的有用 信號。傳感器通常由敏感元件和轉換元件組成,其中敏感元件是指傳感器中直接感應被測 量的部分,轉換元件是指傳感器能將敏感元件的輸出轉換為適于傳輸和處理的電信號部分。 傳感器一般分為內部和外部傳感器,內部傳感器主要測量機器人內部系統狀態,如溫度、 轉速、電壓等;外部傳感器主要測量外界環境的信息,包括位置傳感器、速度傳感器、力 傳感器、視覺傳感器等。
機器人傳感器市場規模穩步增長,市場集中度較低。根據 Mordor Intelligence 預測,全球 機器人傳感器市場規模預計將從 2023 年的 6.16 億美元升至 2028 年的 9.24 億美元, 2024-2028 年 CAGR 為 8.4%。機器人傳感器市場主要參與者來自全球不同國家的眾多企 業,包括瑞士寶盟集團、泰科電子;美國 ATI、Tekscan、Futek、森薩塔、霍尼韋爾;日本 發那科、TDK、歐姆龍集團等。
力傳感器是工業機器人的重要傳感器,ABB 集成力控技術是力傳感器主要技術之一。工業 機器人大多為機械臂形態,由機器人的動力關節和連接桿件組成,力傳感器可以對機械臂 上的力度進行實時監控并進行反饋。隨著機器人向智能化發展,對與外界交互的柔順控制 需求更高,對力控技術提出了更高的要求。為了提高傳感器的靈活度和精度,2014 年 ABB 成功開發了集成力控技術,基于此技術,ABB 提供 3 種集成式力控傳感器,兼容其 IRB 140 到 IRB 6700 的大部分工業機器人。配備該技術的機器人能根據外部實時回饋信號應對制造 過程中的細微變化,像人類一樣拿捏易碎物品或執行精密作業,編程時間也可縮短。
執行層:決定工業機器人實際運動的準確度
機器人的“肌肉”——伺服系統
伺服系統是機器人的“肌肉”,是一種自動控制系統,能夠精確地跟隨或復現某個過程。伺 服系統由驅動器、驅動電機、伺服編碼器及配套軟件組成。伺服驅動器控制伺服電機,其 作用是將控制信號轉換為電機運動的驅動信號,一般通過位置、速度和力矩三種方式對伺 服電機進行控制,實現高精度的傳動系統定位。伺服電機是控制機械元件進行運轉的發動 機,接收到伺服驅動器的驅動信號后,將電能轉化為機械能,即將電壓信號轉化為轉矩和 轉速以驅動控制對象。伺服編碼器一般安裝在伺服電機末端,用于測量轉角及轉速,是伺 服系統的信號反饋裝置,對伺服系統的精度有著關節作用。
ABB 伺服驅動器及伺服電機產品性能優越,覆蓋電壓及功率范圍較大。ABB 的伺服驅動器 能滿足大部分電壓范圍應用場合,定位精度較高。MicroFlex e190 和 MotiFlex e180 高度 集成了以太網的靈活連接和電機反饋技術,并針對要求苛刻的運動應用進行優化。ABB 伺 服電機也同樣擁有完整的產品系列,功率覆蓋范圍滿足大部分應用場合,高轉速及高轉矩 滿足能夠實現高動態響應及精準控制。
ABB 為其伺服產品提供了專門的選型和調試工具。Servosize 是針對 ABB 伺服產品的選型 工具,支持的產品有 MotiFlexe180、MicroFlexe190 和 E530 伺服驅動器以及 eSM、DSM 和 HDS 伺服電機。MintWorkbench、ServoComposer 和 AutomationBuilder 是針對 ABB 產品的編程和調試工具。MintWorkbench 可用于 MotiFlexe180 和 MicroFlexe190 伺服驅動 器的編程和調試,ServoComposer 可用于 E530 伺服驅動器的調試,而 AutomationBuilder 則可用于運動控制 PLC 的編程和調試。
機器人的“關節”——減速器
減速器機器人的“關節”,是連接伺服電機和執行機構的中間裝置。減速器通過齒輪嚙合將 伺服電機高轉速的動力轉化為低轉速、高轉矩的機械運動傳遞到執行機構上,起到匹配轉 速和傳遞轉矩的作用。減速器的輸出轉速、傳動精度、輸出轉矩等決定了對應運動軸的運 動速度、定位精度和承載能力。一般來說,工業機器人的每一個關節都需要搭配一個減速 器,工業機器人大多為六軸,故一般一臺工業機器人需要六個減速器。減速器可以分為諧 波減速器和 RV 減速器,諧波減速器使用簡單、精度較高,但結構剛性不及 RV 減速器,日 本哈莫納科為全球最大諧波減速器生產商;RV 減速器結構剛性較好、輸出轉矩大,但其內 部結構較為復雜、制造成本高、傳動精度略低,日本納博特斯克為全球最大 RV 減速器生產 商。
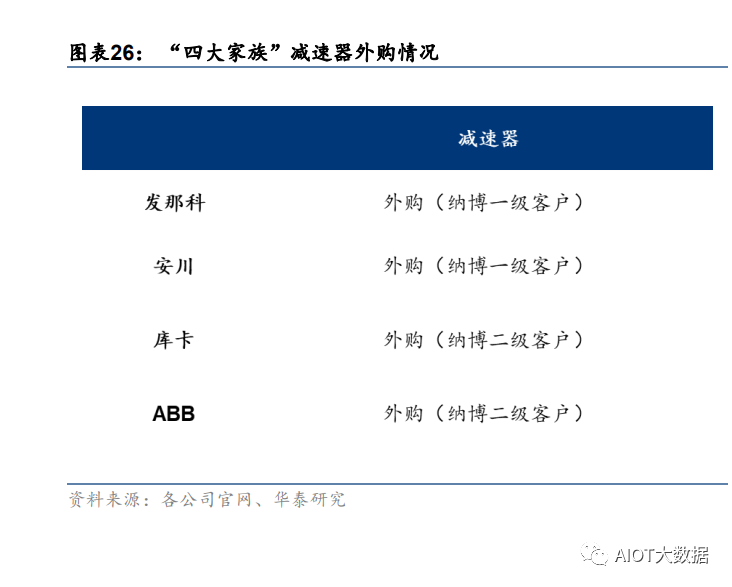
工業機器人企業減速器自產程度較低,大多采取外購。減速器市場集中程度較高,據哈工 大 2021 年發布的《中國機器人產業發展報告》,日本哈默納科、納博特斯克和住友占據了 85%的份額,其中納博特斯克是 RV 減速器的發明者,占據全球工業機器人減速器市場的 60%,并在以及數控機床自動換刀(ATC)裝置的 RV 減速器市場占比 80%,工業機器人 四大家族減速器自產能力較弱,均外購納博特斯克的減速器。日本哈默納科是全球最早研 發生產諧波減速器的企業,減速器市場占比第二位 15%。
決策層:決定工業機器人性能的關鍵
控制器在機器人結構中承擔“小腦”的作用,是決定機器人性能的主要因素。控制器接收 傳感信息并據此生成對應的控制指令,控制機器人完成動作任務。控制器包括硬件和軟件 兩部分,硬件為控制計算機和示教器,其中示教器是進行機器人手動操縱及配置與編程的 手持裝置;軟件主要為以控制算法為核心的運用軟件和系統。控制器的工作原理是將檢測 單元的輸入信號與設定值信號進行比較,并對偏差信號進行運算,然后將運算結果輸出到 執行器,又執行器改變操縱變量再輸出到被控對象。
以 ABB 為例,OmniCore 工業機器人控制器為工業機器人提供強勁性能。其中 C 系列是 OmniCore 家族的緊湊型控制器,不僅在尺寸上大大減小,而且具備靈活的集成能力;E 系列是超緊湊控制器,旨在滿足客戶運行緊湊電子產品裝配線的需要;V 系列(特韌型)是 模塊化 OmniCore 控制器系列中的中型控制器,主要面向工業環境中的中型和大型機器人 進行優化,例如 MH/MT、弧焊。
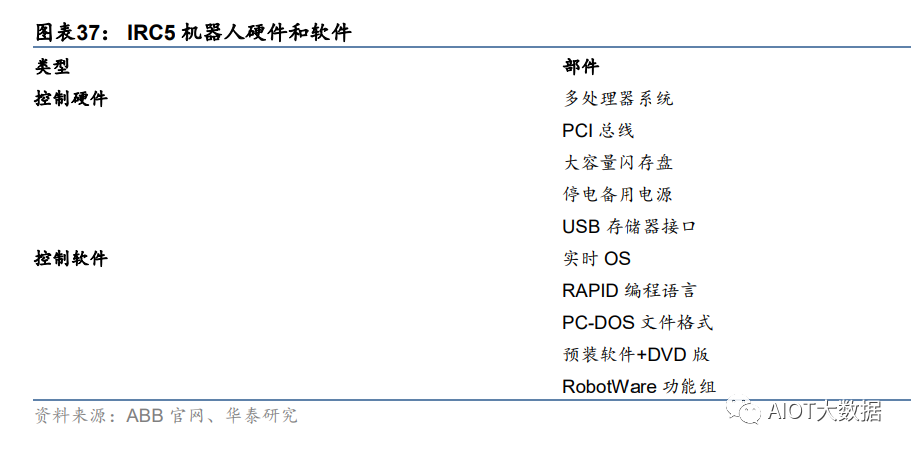
ABB 的 IRC5 是機器人控制器技術的行業標桿。ABB IRC5 控制器包含單柜型、雙柜型和 緊湊型,其中單柜型 IRC5 由控制器和 FlexPendant 示教器兩個硬件部分組成。使用者可以 在 FlexPendant 示教器或 FlexPendant 示教器上的 RobotStudio 上對機器人進行編程。此 外,IRC5 采取靈活的模塊化分布設計。模塊化分布設計較集中式控制器更為靈活,IRC5 由控制模塊和驅動模塊組成,可選增過程模塊,使得 IRC5 可以靈活控制一臺六軸機器人和 伺服驅動工件定位器。其中,控制模塊自帶主計算機,能夠執行高級控制算法,為多達 36 個伺服軸進行復合路徑計算,并可指揮四個驅動模塊。此外,IRC5 還提供靈活性、安全性、 模塊化、應用程序接口、多機器人控制和 PC 工具支持。
ABB 控制器由其優越的運動控制技術支持。QuickMove、TrueMove 和 MultiMove 是 ABB 的核心運動控制技術,它們對于機器人的精度、速度、周期時間、可編程性以及與外部設 備同步性等機器人性能指標的提升起到了重要作用。TrueMove 保證了機器人的路徑精度, 能夠確保不論速度或運行模式如何,甚至是在安全保護停止、進程停止、程序停止或斷電 后,機器人的運動路徑也會遵循編程路徑;QuickMove 則能夠在短時間內實現運動控制, 可以根據不同的工作任務自動優化軸的加速度和速度,從而實現更高效、更精準的運動控 制,提高機器人的生產效率和精度,循環速度比競爭對手快 25%;MultiMove 的引入進一 步鞏固了 ABB 在先進機器人系統和功能方面的領先地位,可以確保多達 4 臺機器人協同運 行。
貝加萊控制系統為 ABB 機器人提供強大集成架構。據公司官網,2017 年 4 月 ABB 宣布收 購貝加萊,貝加萊在工業軟件行業處于領先地位,是 PLC、工業 PC 機、伺服系統控制的 真正領導者,其擁有完整的集成架構。2019 年,ABB 和貝加萊聯合開發了一種將 ABB 機 器人集成到貝加萊機器控制系統中的解決方案。該方案簡化了機器人的編程,實現工作臺 和機器人的并行工作、提高了機器人運動和傳感器的同步、實現對機器人的仿真模擬,使 開發更加便捷。
IT 架構:軟件地位有望逐步提升
以 ABB 為例,工業機器人 IT 架構是決策系統的底座。在工業機器人的決策系統中,我們 看到控制器起到了調度機器人行為、執行復雜指令的重要作用。拆解決策系統來看,底層 的基礎控制硬件和控制軟件,是工業機器人 IT 架構中的核心底座。
硬件:主控設備由 DSQC1000 主計算機等核心硬件構成。單柜型 IRC5 搭載 DSQC1000 主計算機,是整個控制器的大腦,用來接收機器人運動數據和外圍信號,并將信號發送到 各單元;軸計算機接收機器人軸串行測量板返回的位置數據,并與原來的位置數據進行比 較和運算輸出新的位置和速度控制參數;主伺服驅動器用來驅動分布在機器人 6 個軸上的 伺服電機;I/O 模塊用來連接外部信號,是用戶自定義的輸入、輸出信號板;安全面板用來 連接安全相關的信號,正常工作時 LED 燈保持點亮。
軟件:一般由操作系統和算法庫構成。操作系統主要包括 VxWor(嵌入式實時操作系統) 及使用較多的開源操作系統 Windows CE、嵌入式 Linux、嵌入式 Linux、μC/OS-Ⅱ以及 通用 ROS 平臺。其中算法庫包括底層算法庫和應用工藝算法庫,底層算法庫是直接在計算 機操作系統上開發出的算法,控制算法用來規劃機器人的運動點位,動力學算法用來識別 機身負載物的轉動慣量;應用工藝算法庫是軟件使用人員二次開發的算法。RobotWare 是 ABB 嵌入式工業機器人控制器專用軟件系列,用于控制 ABB 公司生產的各種工業機器人。 所含選購插件可為機器人用戶提供一系列豐富系統功能,如多任務并行、對機器人傳輸文 件信息、外部系統通信、先進運動任務等。
ABB 還提供各種針對不同應用場景下不同功能的軟件包。包括噴涂軟件包、上下料軟件包、 拾料軟件包、機加工軟件包、切割軟件包、碼垛軟件包、PickMaster 揀選包裝軟件包等。 為焊接、切割、拾料、碼垛等專門環節提供了定制化的軟件服務,提高特定生產環節的工 作效率。
此外,工業機器人的編程方法一般包括示教編程和虛擬仿真編程。示教編程需要由操作者 對機器人進行逐步的作業引導,通過示教器操作告知機器人需要完成的動作,示教操作完 成后即生成程序,機器人即可按照生成的程序復現全部示教動作,適用于自動生產線等重 復作業機器人。虛擬仿真編程是通過編程軟件實現編程和仿真兩個功能,不僅可以編寫程 序,還可以對機器人運動進行模擬仿真以驗證程序有效性。虛擬仿真編程需要配備機器人 廠家專門的編程軟件,例如 ABB 的 Robot Studio。 Robot Studio 是 ABB 機器人仿真和編程軟件,一方面提供可視化編程環境是機器人編程 更加靈活高效,另一方面強大的仿真功能可以幫助用戶進行機器人應用程序的開發和測試。 2023 年 1 月,ABB 通過云功能增強了其 RobotStudio 機器人編程和仿真軟件,新的 RobotStudio Cloud 使個人和團隊能夠在任何設備上遠程實時協作進行機器人單元設計。
IT 架構:軟件地位有望逐步提升。我們認為,隨著工業機器人向智能化發展,已經逐步進 入軟件定義階段,機器人不再是一個機械制造品(迭代慢/軟硬高度耦合),而逐步演化為 IT 產品(迭代快速/軟硬解耦)。不論是操作系統、算法庫、還是編程開發軟件,在機器人迭代 過程中,正扮演著越來越重要的角色,軟件算法的差異將對機器人最終能夠實現的智能化 水平產生重要影響。基于此,我們看好機器人產業變革下,IT 軟件發展機遇,軟件地位有 望逐步提升。
AI 賦能有望助力產業變革加速到來
產業趨勢:工業機器人正在向具身智能演進
ChatGPT 將人類從機器人流程中的 in-the-loop 變為 on-the-loop。目前,機器人 pipeline (流程)需要一個專門的工程師 in-the-loop 編寫代碼來改進流程。而 ChatGPT 的引入,可 以替代人類在循環中的位置,人類(技術或非技術均可)用戶可以以 on-the-loop 的形式, 通過高級語言命令與語言模型交互,實現無縫部署各種平臺和任務。
人類用戶在機器人 pipeline 中評估 ChatGPT 輸出的質量和安全性。人類在機器人 pipeline 中的任務主要包括:1)定義高級機器人函數庫。高級機器人函數庫(high-level robot function library)一方面面向機器人平臺,能夠調用和指導機器人相關動作;另一方面面向 ChatGPT, 保證庫中函數的命名應能便于 ChatGPT 理解和遵循。2)構建 prompt。Pompt 描述任務目 標,并標識允許 ChatGPT 使用的高級函數庫中的函數。此外,還可以包括約束信息,或者 告知 ChatGPT 如何組織其響應。3)分析評估 ChatGPT 輸出結果并反饋。用戶以 on-the-loop 的形式,通過直接分析或模擬來評估 ChatGPT 輸出的代碼,并就輸出代碼的質量和安全性 向 ChatGPT 提供反饋。4)迭代。不斷迭代 chatgpt 生成的結果直到符合人類預期,并確 保最終的代碼可以部署到機器人上執行。
簡單任務:ChatGPT 能夠以 zero-shot 的方式解決簡單的機器人任務。對于簡單的機器人 任務,用戶只需提供 prompt 和函數庫描述,不需要提供具體的代碼示例,ChatGPT 即可 zero-shot 解決時空推理、控制真實無人機和無人機工業檢測等問題。1)時空推理:要求 ChatGPT 控制一個平面機器人,用視覺伺服捕捉籃球位置。2)真實世界無人機飛行:使 用 ChatGPT 和 API 控制一個真實的無人機,完成物體尋找任務。3)AirSim 工業檢測:基 于 AirSim 模擬器,利用 ChatGPT 控制模擬域無人機進行工業巡檢。
復雜任務:在人類用戶 on-the-loop 交互下,ChatGPT 能夠完成更復雜的機器人控制任務。 對于更復雜的問題,ChatGPT 沒法 zero-shot 完成或者完成效果有限,此時人類用戶可以 以文本反饋交互的方式輔助 ChatGPT,完成課程學習、AirSim 避障等任務。1)課程學習: 教授 ChatGPT 簡單的拾取和放置物體技能,并將所學會的技能按邏輯組合用于更復雜的區 塊排列任務。2)AirSim 避障:ChatGPT 構建了避障算法的大部分關鍵模塊,但仍需要人 工反饋無人機朝向等部分信息。人工反饋均是高級的自然語言,但 ChatGPT 能夠理解并在 適當的位置進行代碼修正。
落地情況:ABB 等頭部廠商積極擁抱產業變化
工業機器人領域 AI 應用還處于探索階段,賦能部分智能識別和智能編程環節。以 ABB 為 例,通過其人工智能機器人物品揀選器賦能電商物流領域。根據 Statista 的數據,未來五年 內全球電子商務收入預計將增長 50%以上,從 2019 年的 1.7 萬億歐元增至 2024 年的 2.6 萬億歐元。ABB 積極發掘人工智能機器人解決方案在物流、倉儲、包裹和郵件分揀等廣泛 應用中的巨大機遇,據公司官網,2020 年 2 月公司和硅谷人工智能初創公司 Covariant 宣 布建立合作伙伴關系,將人工智能機器人解決方案推向市場。Covariant 的協變大腦是一種 通用人工智能,它允許機器人在周圍的世界中觀察、推理和行動,完成對于傳統編程機器 人來說過于復雜和多樣化的任務。Covariant 的軟件使機器人能夠進行強化學習:通過反復 試驗自行適應新任務,從而不斷擴大它們可以挑選的物體范圍。ABB 和 Covariant AI 支 持解決方案在 Active Ants 首次部署,該公司是荷蘭電商服務領先提供商。
AI 和機器視覺提升賦予機器人人類靈巧性,提升揀選智能識別效率和揀選速度。據公司官 網,2023 年 4 月 25 日,ABB 通過推出基于人工智能和視覺可以在倉庫和履行中心的非結 構化環境中準確檢測和揀選物品,大大提高揀選速度和精準度。使用機器視覺和人工智能, 物品拾取器可以在吸力夾具拾取物品并將其放入指定的箱子之前確定每個物品的最佳抓取 點。該系統不需要任何人工監督或有關其挑選的物品的物理屬性的信息,能夠在動態和非 結構化環境中處理各種物品,并通過 ABB 視覺系統實現高精度揀選,準確度超過 99.5%, 每小時可拾取多達 1,400 個未分類的物品。該產品目前適用于各種負載和應用,可安裝到 三種 ABB 機器人之一 - IRB1200、IRB 1300 和 IRB 2600。
ABB 與微軟合作,利用生成式 AI 賦能工業分析。據公司官網,2023 年 7 月 5 日,ABB 與 微軟合作將生成式 AI 功能整合到工業數字化解決方案中,本次合作旨在通過部署 Copilot 功能,使 ABB Ability Genix 工業分析和 AI 套件及其應用可以進行更直觀的用戶交互,進一 步發揮關聯數據的價值,從而提升效率和可持續發展性。ABB Ability Genix 是一個綜合性 的模塊化工業物聯網、分析和 AI 平臺。ABB 將通過 Azure OpenAI 服務,包括 GPT-4 等大 型語言模型(LLM)將生成式 AI 整合到 Genix 平臺和應用中,實現代碼、圖像和文本生成等 功能。新的 Genix Copilot 應用將提供直觀的功能并簡化各個流程和運營的關聯數據流來增 強用戶體驗。通過為行業管理人員、職能專家和車間工程師提供實時的可執行洞見,改善 決策質量并提高生產力。據 ABB,此類洞見有望將資產生命周期延長高達 20%,并將意外 停機時間減少多達 60%。
編輯:黃飛
?








 工商網監
工商網監
評論