 電子發(fā)燒友App
電子發(fā)燒友App


近年來,隨著計(jì)算機(jī)技術(shù)與人工智能科學(xué)的飛速發(fā)展,智能機(jī)器人技術(shù)逐漸成為現(xiàn)代機(jī)器人研究領(lǐng)域的熱點(diǎn)。其中,服務(wù)機(jī)器人開辟了機(jī)器人應(yīng)用的新領(lǐng)域。
隨著人們生活水平的提高,健康、舒適的家居環(huán)境越來越被更多的人所關(guān)注。買房、裝修成為人們茶余飯后談?wù)摰臒狳c(diǎn)話題,但裝修后又臟又累的衛(wèi)生清掃工作,成為困擾家庭主婦的又一大難題。對不少家庭而言,清潔機(jī)器人已成為清潔家庭的必備小家電。
自動(dòng)進(jìn)行房間地面清潔的自動(dòng)掃地機(jī)器人,集機(jī)械學(xué)、電子技術(shù)、傳感器技術(shù)、計(jì)算機(jī)技術(shù)、控制技術(shù)、機(jī)器人技術(shù)、人工智能等諸多學(xué)科為一體。自動(dòng)掃地作為智能移動(dòng)機(jī)器人實(shí)用化發(fā)展的先行者,
掃地機(jī)器人,又稱自動(dòng)打掃機(jī)、智能吸塵、機(jī)器人吸塵器等,是智能家用電器的一種,能憑借一定的人工智能,自動(dòng)在房間內(nèi)完成地板清理工作。一般采用刷掃和真空方式,將地面雜物先吸納進(jìn)入自身的垃圾收納盒,從而完成地面清理的功能。本設(shè)計(jì)掃地機(jī)器人采用刷掃吸塵方式,機(jī)身為無線機(jī)器,以圓盤型為主,使用充電電池運(yùn)作,操作方式使用遙控器、或是按機(jī)器上的操作面板相應(yīng)按鈕。本次設(shè)計(jì)的掃地機(jī)器人可設(shè)定時(shí)間預(yù)約打掃,自行充電。前方設(shè)置超聲破測距傳感器,可偵測障礙物,如碰到墻壁或其他障礙物,會自行轉(zhuǎn)彎,從室內(nèi)邊沿開始走矩形路線,有規(guī)劃清掃地區(qū)。
掃地機(jī)器人的工作原理及特點(diǎn)
掃地機(jī)器人由微電腦控制,可實(shí)現(xiàn)自動(dòng)導(dǎo)航并對地面進(jìn)行清掃和吸塵,通過碰撞頭實(shí)現(xiàn)對前方障礙物的躲避和繞過可以使所到角落得到清潔,同時(shí)兩個(gè)超大邊掃輪的設(shè)計(jì),可使角落和地面掃的更徹底,更干凈,兩個(gè)清掃輪的相對旋轉(zhuǎn),更使得垃圾不會從機(jī)體底部溜掉,清潔更完善,同時(shí)清掃吸塵一體的雙重作用,使掃起來的塵土更有規(guī)律和順暢的進(jìn)入垃圾收集盒內(nèi),并且通過在前輪和清掃輪動(dòng)力箱內(nèi)上安裝光電傳感器,可以使該機(jī)器人擁有自動(dòng)防機(jī)體卡死和掃輪卡死的功能,當(dāng)被卡住使其自動(dòng)后退或關(guān)機(jī),并在碰撞頭上裝有紅外反射探測器,可自動(dòng)判斷前方是否懸崖,并自動(dòng)繞開。
特點(diǎn):
1、掃地省時(shí)、省力、提高工作效率、能源利用率:整個(gè)清潔過程不需要人控制,減輕人的操作負(fù)擔(dān),人們可以利用節(jié)省的時(shí)間做其他有意義的事。
2、低噪音:小于50分貝,清潔房間的過程免受噪音之苦。
3、凈化空氣:內(nèi)置活性碳、吸附空氣中有害物質(zhì)。
4、輕便小巧:輕松打掃普通吸塵器清理不到的死角。
掃地機(jī)器人的關(guān)鍵技術(shù)
掃地機(jī)器人系統(tǒng)通常由四個(gè)部分組成:移動(dòng)機(jī)構(gòu)、感知系統(tǒng)、控制系統(tǒng)和吸塵系統(tǒng)。
移動(dòng)機(jī)構(gòu)是掃地機(jī)器人的主體,決定了機(jī)器人的運(yùn)動(dòng)空間,一般采用輪式機(jī)構(gòu)。
感知系統(tǒng)一般采用超聲波測距儀、接觸和接近覺傳感器、紅外線傳感器和CCD攝像機(jī)等。
隨著近年來計(jì)算機(jī)技術(shù)、人工智能技術(shù)、傳感技術(shù)以及移動(dòng)機(jī)器人技術(shù)的迅速發(fā)展,掃地機(jī)器人控制系統(tǒng)的研究和開發(fā)已具備了堅(jiān)實(shí)的基礎(chǔ)和良好的發(fā)展前景。掃地機(jī)器人的控制與工作環(huán)境往往是不確定的或多變的,因此必須兼顧安全可靠性、抗干擾性以及清潔度。用傳感器探測環(huán)境、分析信號,以及通過適當(dāng)?shù)慕7椒▉砝斫猸h(huán)境,具有特別重要的意義。近年來對智能機(jī)器人的研究表明,對于工作在復(fù)雜非結(jié)構(gòu)環(huán)境中的自主式移動(dòng)機(jī)器人,要進(jìn)一步提高其自動(dòng)化程度,主要依靠模式識別及障礙物識別、實(shí)時(shí)數(shù)據(jù)傳輸及適當(dāng)人工智能方法,還需要進(jìn)一步開發(fā)全局模型,從而為機(jī)器人獲取全局信息。
目前發(fā)展較快、對掃地機(jī)器人發(fā)展影響較大的關(guān)鍵技術(shù)是:傳感技術(shù)、智能控制技術(shù)、路徑規(guī)劃技術(shù)、掃地技術(shù)、電源技術(shù)等。
掃地機(jī)器人的機(jī)械結(jié)構(gòu)
掃地機(jī)器人主要包括以下幾部分:
1、個(gè)行走驅(qū)動(dòng)輪及驅(qū)動(dòng)電機(jī)。該部分主要保證機(jī)器人能夠在平面內(nèi)移動(dòng)。殼體前端和側(cè)面裝有紅外開關(guān),作為碰撞檢測傳感器。底面的3個(gè)紅外開關(guān)作為臺階檢測傳感器,防止跌落。驅(qū)動(dòng)輪上裝有光電編碼盤,可以對輪速進(jìn)行檢測和控制,實(shí)現(xiàn)定位和路徑規(guī)劃。同時(shí)還擴(kuò)展了超聲波傳感器,用于精確定位的需要;
2、清掃機(jī)構(gòu)。用電機(jī)帶動(dòng)兩個(gè)清掃刷,使左面清掃刷順時(shí)針轉(zhuǎn)動(dòng),右面逆時(shí)針轉(zhuǎn)動(dòng),這樣就可以在清掃灰塵時(shí)將灰塵集中于吸風(fēng)口處,為掃地機(jī)構(gòu)的工作做準(zhǔn)備;
3、掃地機(jī)構(gòu)。制造強(qiáng)大的吸力,將灰塵吸入灰塵存儲箱中;
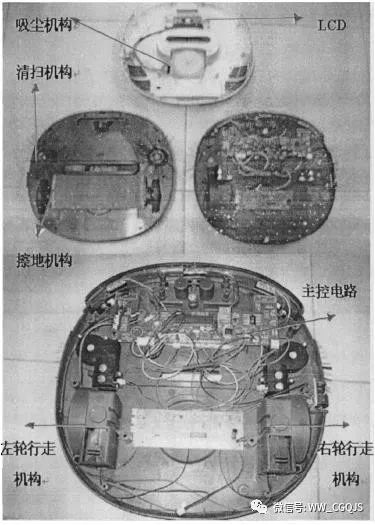
4、擦地機(jī)構(gòu)。在清掃、掃地之后,利用安裝在殼體下面的清潔布擦除殘留在?地面上的細(xì)小灰塵,保證清潔工作的質(zhì)量。
掃地機(jī)器人的工作流程
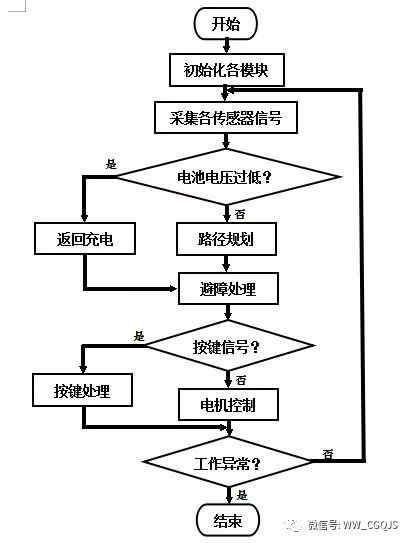
1、首先可以通過鍵盤或者遙控器啟動(dòng)清潔機(jī)器人,讓它開始清掃工作。
2、機(jī)器人一旦開始工作,便控制清掃機(jī)構(gòu)進(jìn)行清掃、掃地機(jī)構(gòu)開始掃地、擦地機(jī)構(gòu)開始擦地。
3、機(jī)器人開始工作,傳感探測模塊就開始不斷地采集外部信息,送到CPU進(jìn)行分析和決策產(chǎn)生機(jī)器人行走的路徑。
4、當(dāng)路徑規(guī)劃需要機(jī)器人實(shí)現(xiàn)轉(zhuǎn)向的時(shí)候。CPU就分別改變左右輪的速度,通過差速來實(shí)現(xiàn)轉(zhuǎn)向。
5、工作期間機(jī)器人可以通過LCD顯示一些相關(guān)信息(比如工作模式、工作計(jì)時(shí)或溫度)。
6、遙控器除了可以控制清潔機(jī)器人的啟停,還可以對機(jī)器人進(jìn)行定時(shí),讓機(jī)器人在一定時(shí)間后開始工作或者工作一定時(shí)間后停止工作。
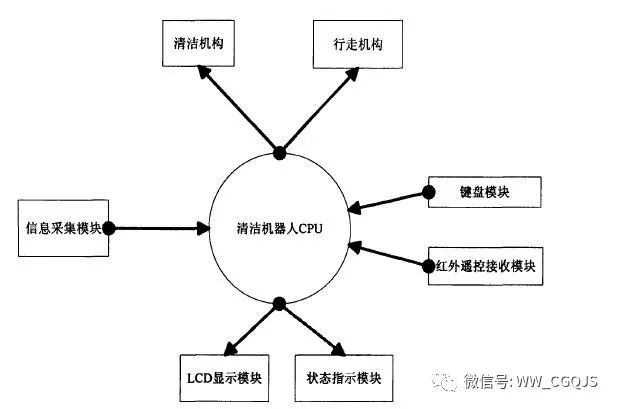
機(jī)器人利用安裝的各類傳感器來獲取室內(nèi)環(huán)境以及自身的基本信息,如障礙物的位置、自身走過的距離等;然后根據(jù)獲得的信息,選定相應(yīng)的控制策略;通過以單片機(jī)為核心的控制系統(tǒng)進(jìn)行障礙物判斷、避障策略選擇和運(yùn)動(dòng)行走實(shí)施。機(jī)器人面板上有控制其開始/停止工作的按鍵。同時(shí)也可以通過遙控來控制,遙控還可以用來對機(jī)器人進(jìn)行定時(shí),LCD實(shí)時(shí)的顯示定時(shí)的倒記時(shí)和當(dāng)前的溫度值。
掃地機(jī)器人傳感器系統(tǒng)
任何機(jī)器人都離不開傳感器,機(jī)器人要具備智能行為必須不斷感知外界環(huán)境,從而做出相應(yīng)的決策行為。
超聲波傳感器
超聲波是一種一定頻率范圍的聲波它具有在同種媒質(zhì)中以恒定速率傳播的特性,而在不同媒質(zhì)的界面處,會產(chǎn)生反射現(xiàn)象利用這一特性,就可以根據(jù)測量發(fā)射波與反射波之間的時(shí)間間隔,從而達(dá)到測量距離的作用其具體的計(jì)算公式如下:
s=v×t/2
注:s:為障礙物與吸塵器之間的距離;
t:為發(fā)射到接收經(jīng)歷的時(shí)間;
v:為聲波在空氣中傳播的速度
在掃地機(jī)器人中,避障功能的實(shí)現(xiàn)正是利用了這一超聲波測距的原理它的傳感器部分由三對(每對包括一個(gè)發(fā)射探頭和一個(gè)接收探頭)共六個(gè)超聲波傳感頭組成
由單獨(dú)的振蕩電路產(chǎn)生頻率固定為40kHz,幅值為5V的超聲波信號在控制器送來的路選信號的作用下,40kHz的振蕩信號被加在超聲發(fā)射探頭的兩端,從而產(chǎn)生超聲信號向外發(fā)射;該信號遇到障礙物時(shí),產(chǎn)生反射波,當(dāng)這一反射波被接收器接收后,根據(jù)前述測距的原理,就可以精確地判斷障礙物的遠(yuǎn)近;同時(shí),根據(jù)信號的幅值大小,也可以初步確定障礙物的大小。
超聲波傳感器采用直接反射式的檢測模式。位于傳感器前面的被檢測物通過將發(fā)射的聲波部分地發(fā)射回傳感器的接收器,從而使傳感器檢測到被測物,經(jīng)單片機(jī)系統(tǒng)處理判斷前方物體的大小、遠(yuǎn)近及大體屬性。
紅外測距傳感器
紅外測距傳感器利用紅外信號遇到障礙物距離的不同反射的強(qiáng)度也不同的原理,進(jìn)行障礙物遠(yuǎn)近的檢測。紅外測距傳感器具有一對紅外信號發(fā)射與接收二極管,發(fā)射管發(fā)射特定頻率的紅外信號,接收管接收這種頻率的紅外信號,當(dāng)紅外的檢測方向遇到障礙物時(shí),紅外信號反射回來被接收管接收,經(jīng)過處理之后,即可利用紅外線的返回信號來識別周圍環(huán)境的變化。
接觸式傳感器
接觸式厚度傳感器,通常采用電感式位移傳感器、電容式位移傳感器、電位器式位移傳感器、霍耳式位移傳感器等(見位移傳感器)進(jìn)行接觸式厚度測量。為了連續(xù)測量移動(dòng)著的物體的厚度,常在位移傳感器的可動(dòng)端頭上安裝滾動(dòng)觸頭,以減少磨損。接觸式厚度傳感器可測量物體高度,空間大小。全能清潔機(jī)器人可利用這一點(diǎn)探測障礙物的高度,進(jìn)一步做出判斷發(fā)揮它的功能.
紅外光電傳感器
把渾濁度傳感器的外殼固定在被測箱體內(nèi),采用一定波長的紅外發(fā)光二極管作為檢測光源,穿透被測溶液,檢測其透射光強(qiáng)來檢測溶液渾濁度的程度。紅外發(fā)光二極管發(fā)射的紅外光穿透被測溶液的介質(zhì),被接收端的光電三極管接受,產(chǎn)生光電流。由于溶液含有的介質(zhì)、灰塵的顆粒大小、密度不同,光電三極管的光電流近似為線性變化。經(jīng)濾波后輸出,即得到與渾濁度相關(guān)的檢測信號。
防碰撞傳感器
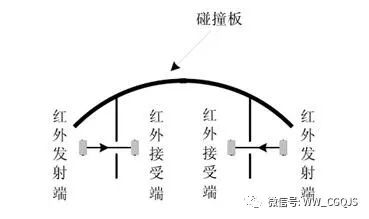
因各種因素的影響,掃地機(jī)器人難免會有撞上障礙物的可能。為了處理這種情況,我們利用光電開關(guān)傳感器來感應(yīng)車體受到的碰撞,及碰撞的大概位置,以使掃地機(jī)器人做出相應(yīng)的決策。
在掃地機(jī)器人的前端設(shè)計(jì)了約180°的碰撞板,在碰撞板左右兩側(cè)各裝有一個(gè)光電開關(guān)。光電開關(guān)由一對紅外發(fā)射對管組成,發(fā)光二極管發(fā)射的紅外光線通過掃地機(jī)器人機(jī)身特制的小孔被光敏二極管接受,當(dāng)機(jī)身碰撞板受到碰撞時(shí),碰撞板就會擋住機(jī)身特制小孔,阻礙紅外線的接受從而向控制系統(tǒng)傳達(dá)信息。光電開關(guān)工作原理如圖所示。此結(jié)構(gòu)可避免測量盲區(qū)帶來的誤差。掃地機(jī)器人在任何方向上的碰撞,都會引起左右光電開關(guān)的響應(yīng),從而根據(jù)碰撞的方向做出相應(yīng)的反應(yīng)。
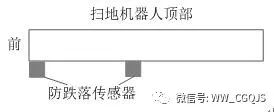
防跌落傳感器
為了防止掃地機(jī)器人遇到臺階時(shí)跌落,在掃地機(jī)器人背面安裝3個(gè)防跌落傳感器。防跌落傳感器安裝位置如圖所示。

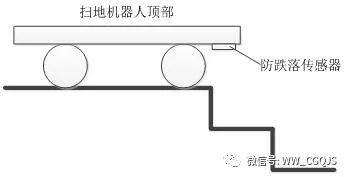
防跌落傳感器也是利用超聲波進(jìn)行測距。當(dāng)掃地機(jī)器人行進(jìn)至臺階邊緣時(shí),防跌落傳感器利用超聲波測得掃地機(jī)器人與地面之間的距離,當(dāng)超過限定值時(shí),向控制器發(fā)送信號,控制器控制掃地機(jī)器人進(jìn)行轉(zhuǎn)向,改變掃地機(jī)器人前進(jìn)方向,從而實(shí)現(xiàn)防止跌落的目的。掃地機(jī)器人防止跌落示意圖如圖所示。
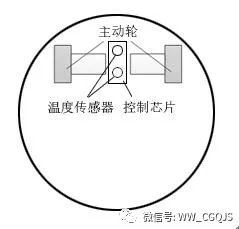
防過熱傳感器
為了防止掃地機(jī)器人持續(xù)工作導(dǎo)致電機(jī)過熱,從而導(dǎo)致電路的燒毀,在掃地機(jī)器人電路板上安裝兩個(gè)溫度傳感器。當(dāng)掃地機(jī)器人工作一段時(shí)間電機(jī)溫度達(dá)到一定限度后一個(gè)溫度傳感器發(fā)送信號給控制器,控制器再控制掃地機(jī)器人停止工作,并運(yùn)行散熱風(fēng)扇進(jìn)行散熱。當(dāng)溫度降到一定程度后,另一個(gè)溫度傳感器發(fā)送信號給控制器,控制器在控制掃地機(jī)器人繼續(xù)工作。
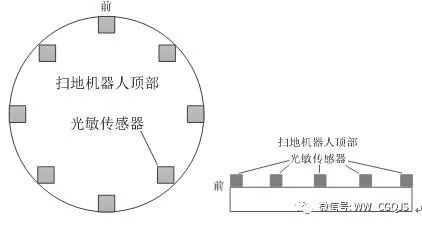
床底深度清掃
床底、沙發(fā)底、柜子底等地方相對較臟,因此這些地方需要重點(diǎn)清掃,以保證清潔度。為實(shí)現(xiàn)此功能,在掃地機(jī)器人正面安裝8個(gè)光敏傳感器。
掃地機(jī)器人在床底或柜子底開始工作后,光敏傳感器接收的光強(qiáng)較弱。當(dāng)掃地機(jī)器人運(yùn)行離開床底或柜子底時(shí),光敏傳感器接收到的光強(qiáng)發(fā)生變化,向控制器發(fā)送信號,控制器發(fā)出控制信號,使掃地機(jī)器人轉(zhuǎn)向,重新回到暗處,繼續(xù)進(jìn)行清掃。
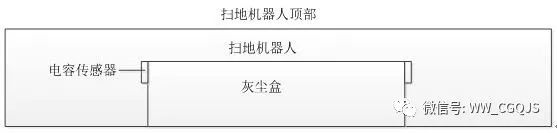
灰塵盒防滿傳感器
為了檢查掃地機(jī)器人灰塵盒中的灰塵是否裝滿,在灰塵盒兩側(cè)安裝變介質(zhì)型電容傳感器。當(dāng)灰塵盒中灰塵高度到達(dá)電容傳感器高度時(shí),電容傳感器中的介質(zhì)發(fā)生改變,由于灰塵的介電常數(shù)與空氣的介電常數(shù)不同,從而引起傳感器電容變化,傳感器將信號傳給控制器,控制器控制掃地機(jī)器人發(fā)出報(bào)警信號,提醒主人應(yīng)該清理灰塵盒了。
低電量自動(dòng)返回充電功能
掃地機(jī)器人所帶電池容量有限,所以就需要在電量低時(shí)自動(dòng)返回充電基座進(jìn)行充電再返回原位置繼續(xù)打掃。當(dāng)電量低于限定值時(shí),控制器會向紅外線發(fā)射器發(fā)送信號,紅外線發(fā)射器向四周發(fā)射紅外線。充電基座安裝有紅外線傳感器,感受到來自掃地機(jī)器人發(fā)射來的紅外線后,會向掃地機(jī)器人發(fā)射紅外線。掃地機(jī)器人內(nèi)部的紅外線傳感器接收到后會向控制器發(fā)送信號,控制器就會控制掃地機(jī)器人按照接受到紅外線的方向找到充電基座,并自動(dòng)返回進(jìn)行充電。
邊緣檢測傳感器
邊緣檢測傳感器是一個(gè)機(jī)械開關(guān),開關(guān)的觸發(fā)端設(shè)計(jì)成一個(gè)滑輪結(jié)構(gòu),在機(jī)器人的兩側(cè)各裝有一個(gè),用于保證機(jī)器人可以始終貼著墻的邊緣走。這樣就可以對墻壁邊緣死角部分進(jìn)行更好的清掃。
光電編碼器
光電編碼器是掃地機(jī)器人上的位置和速度檢測的傳感器,掃地機(jī)器人上的光電編碼器通過減速器和驅(qū)動(dòng)輪的驅(qū)動(dòng)電機(jī)同軸相連,并以增量式編碼的方式記錄驅(qū)動(dòng)電機(jī)旋轉(zhuǎn)角度對應(yīng)的脈沖。由于光電編碼器和驅(qū)動(dòng)輪同步旋轉(zhuǎn),利用碼盤、減速器、電機(jī)和驅(qū)動(dòng)輪之間的物理參數(shù),可將檢測到的脈沖數(shù)轉(zhuǎn)換成驅(qū)動(dòng)輪旋轉(zhuǎn)的角度,即機(jī)器人相對于某一參考點(diǎn)的瞬時(shí)位置,這就是所謂的里程計(jì)。光電編碼器已經(jīng)成為在電機(jī)驅(qū)動(dòng)內(nèi)部、輪軸,或在操縱機(jī)構(gòu)上測量角速度和位置的最普遍的裝置。因?yàn)楣怆娋幋a器是本體感受式的傳感器,在機(jī)器人參考框架中,它的位置估計(jì)是最佳的。
電子羅盤
電子羅盤是利用地磁場,檢測電子羅盤模塊相對于地磁場方向的偏轉(zhuǎn)角度的傳感器。電子羅盤模塊是由高可靠性的磁性傳感器及驅(qū)動(dòng)芯片組成,集成度非常高,實(shí)現(xiàn)了高可靠性、高精度、強(qiáng)抗磁場干擾的數(shù)碼電子羅盤功能。電子羅盤模塊有兩個(gè)磁性傳感器和一個(gè)驅(qū)動(dòng)芯片構(gòu)成。磁性傳感器里面包含一個(gè)LR振蕩電路,當(dāng)磁性傳感器與地球磁感線平行方向夾角發(fā)生變化時(shí),LR振蕩電路的磁感應(yīng)系數(shù)也會發(fā)生變化。驅(qū)動(dòng)芯片通過磁性傳感器磁感應(yīng)系數(shù)的變化可以計(jì)算出磁性傳感器與地球磁感線之間的夾角,驅(qū)動(dòng)芯片可以連接三個(gè)磁性傳感器,這三個(gè)磁性傳感器方向互為垂直,這樣就可以測量在三維方向上與地球磁感線的夾角,從而得到當(dāng)前的三維方向。電子指南針模組只要得到水平方向上與地球磁感線的夾角就可以測得方向。
針對電子羅盤容易受到電磁干擾以及光電編碼器會受到輪子打滑等不確定因素造成的角度測量不準(zhǔn)的特點(diǎn),確定物體的運(yùn)動(dòng)方向還需要一個(gè)傳感器,在上述情況發(fā)生時(shí)能夠精確測量運(yùn)動(dòng)物體運(yùn)動(dòng)的角度。陀螺儀是用來測量運(yùn)動(dòng)物體的角度、角速度和角加速度的傳感器,它能夠有效解決上述問題。
掃地機(jī)器人路徑規(guī)劃技術(shù)
掃地機(jī)器人的路徑規(guī)劃就是根據(jù)機(jī)器人所感知到的工作環(huán)境信息,按照某種優(yōu)化指標(biāo),在起始點(diǎn)和目標(biāo)點(diǎn)規(guī)劃出一條與環(huán)境障礙無碰撞的路徑,并且實(shí)現(xiàn)所需清掃區(qū)域的合理完全路徑覆蓋。
根據(jù)機(jī)器人對環(huán)境信息知道的程度不同,可以分為兩種類型:環(huán)境信息完全知道的全局路徑規(guī)劃和環(huán)境信息完全未知或部分未知,通過傳感器在線地對機(jī)器人的工作環(huán)境進(jìn)行探測,以獲取障礙物的位置、形狀和尺寸等信息的局部路徑規(guī)劃。
對未知區(qū)域的邊沿學(xué)習(xí)
由于掃地器人采用的是紅外線傳感器,考慮到紅外線的探測范圍和清掃環(huán)境的未知性,采用了一種沿邊學(xué)習(xí)的方式,即讓清潔機(jī)器人從指定位置沿墻壁及其靠近墻壁的障礙物外緣按逆時(shí)針(或順時(shí)針)方向繞房行走一周,行走過程中實(shí)時(shí)記錄清潔機(jī)器人中心點(diǎn)的位置坐標(biāo),這樣就可以大致描述出清掃環(huán)境的輪廓及靠墻障礙物的分布情況。并記錄下當(dāng)y坐標(biāo)達(dá)到最大值ymax時(shí),x能達(dá)到的最大值xmax(考慮到障礙物可能存在于墻壁的右下角)。
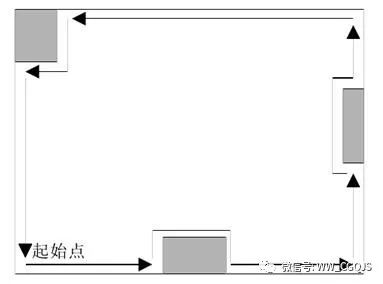
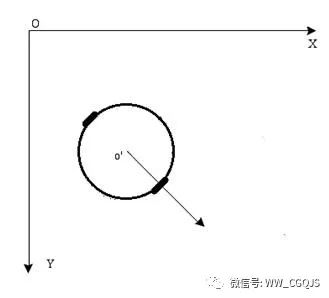
在機(jī)器人的整個(gè)運(yùn)動(dòng)過程中,采用角度測量系統(tǒng)對當(dāng)前的自身角度進(jìn)行檢測并由光電編碼器得到在該方向上運(yùn)行的位移,通過實(shí)時(shí)記錄,并對運(yùn)動(dòng)路線進(jìn)行積分,得到當(dāng)前位置。如下圖所示:
全區(qū)域覆蓋路徑規(guī)劃方案
為了使清潔機(jī)器人能按照我們所要求的工作模式進(jìn)行清掃,首先要規(guī)定其運(yùn)動(dòng)規(guī)律,如下圖所示:
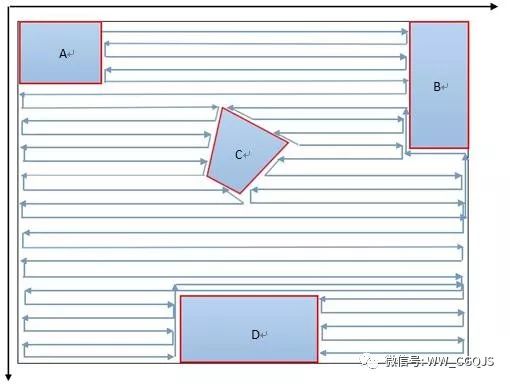
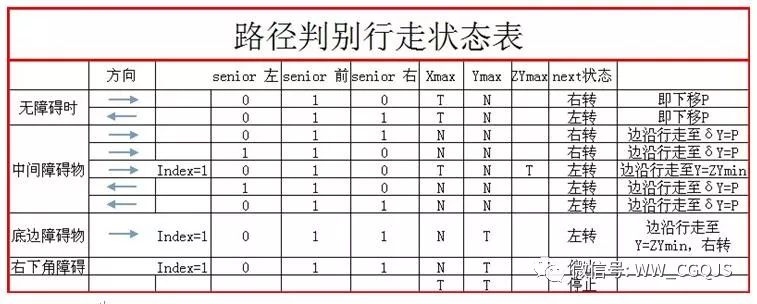
若該區(qū)域內(nèi)無任何障礙物出現(xiàn),則主要是控制程序驅(qū)動(dòng)掃地機(jī)器人在該區(qū)域內(nèi)做直線帶狀往復(fù)運(yùn)動(dòng),當(dāng)機(jī)器人前方的紅外傳感器檢測到其運(yùn)動(dòng)到x方向最大位置,則機(jī)器人繞右側(cè)輪子轉(zhuǎn)180°,在機(jī)器人轉(zhuǎn)角時(shí),只驅(qū)動(dòng)一個(gè)驅(qū)動(dòng)輪,以另一個(gè)驅(qū)動(dòng)輪為支點(diǎn)向左或向右轉(zhuǎn),這樣做能夠使得機(jī)器人在轉(zhuǎn)過180°后正好移過一個(gè)車位,保證機(jī)器人在往返清掃過程中不留下清掃死區(qū)。
若在運(yùn)動(dòng)過程中遇到障礙物,則機(jī)器人能夠智能越障。障礙物主要分三種情況,一種是靠最遠(yuǎn)處墻壁的障礙物,如障礙物D,第二種是不靠墻障礙物,第三種是其他靠墻障礙物。由于在清掃前,機(jī)器人進(jìn)行了邊沿學(xué)習(xí),獲得了空間的邊緣信息,因此可自動(dòng)將第三種障礙物作為墻壁處理。若障礙物不是靠墻障礙物,則機(jī)器人能利用紅外測距傳感器沿障礙物邊沿行走,直到其在y軸方向的位置移動(dòng)一個(gè)車位,然后轉(zhuǎn)180°運(yùn)動(dòng)。同時(shí)系統(tǒng)內(nèi)的存儲單元可以記錄該障礙物的y軸最大坐標(biāo)和最小坐標(biāo),即記錄障礙物在y軸方向的尺寸,當(dāng)機(jī)器人超高障礙物運(yùn)動(dòng)到x軸最大或者最小位置處時(shí),需要沿y軸反方向走一個(gè)障礙物尺寸的距離,然后繼續(xù)清潔障礙物另一側(cè)的區(qū)域。若障礙物靠最遠(yuǎn)處墻壁時(shí),若y軸達(dá)到最大值,且x軸方向未達(dá)到xmax,且前方傳感器檢測到障礙物,則機(jī)器人繞過障礙物運(yùn)動(dòng)y軸方向最遠(yuǎn)處,清掃剩余區(qū)域,當(dāng)y軸方向和x軸方向同時(shí)達(dá)到邊沿檢測時(shí)得到的最大位置值時(shí),停止檢測。
掃地機(jī)器人的運(yùn)動(dòng)規(guī)律如下表:
編輯:黃飛
?











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論