3D圖形控件設(shè)置并聯(lián)機(jī)器人(如Delta機(jī)構(gòu))各兩件間的對(duì)象關(guān)系,怎么設(shè)置啊有沒有人知道啊?目前見到的都是串聯(lián)型機(jī)構(gòu)。
2020-03-28 21:42:43
作者:Pedro Gelabert博士;V. Pascal Nelson,德州儀器 (TI) 隨著很多全新技術(shù)的涌現(xiàn),人們?cè)絹?lái)越需要用3D方法來(lái)表示現(xiàn)實(shí)世界中的物體。特別是機(jī)器視覺和機(jī)器人技術(shù),它們
2018-08-30 14:51:20
`機(jī)器人`
2015-08-09 12:23:02
有沒有機(jī)器人比較全的資料
2017-03-21 12:35:21
請(qǐng)各位大神指導(dǎo),移動(dòng)式機(jī)器人是怎么做EMC保護(hù)的,機(jī)器人是鋰電池供電,所以就不能接大地了,那么對(duì)機(jī)器人的干擾是通過何種方式來(lái)釋放或轉(zhuǎn)移的?
2016-07-26 13:33:14
R15.06)給出了機(jī)器人的設(shè)計(jì)和應(yīng)用要求,關(guān)于協(xié)作運(yùn)行也有一些要求。一般而言,這些標(biāo)準(zhǔn)倡導(dǎo)的安全完整性要求是SIL 2、HFT = 1(根據(jù)IEC 62061)或PL d、CAT 3(根據(jù)ISO 13849
2018-10-30 11:33:11
labview 視覺機(jī)器人抓取工件 CCD相機(jī)的二維坐標(biāo)系的建立?希望分享,謝謝
2017-08-18 20:53:37
傳感器網(wǎng)絡(luò)與移動(dòng)機(jī)器人控制新版機(jī)器人技術(shù)手冊(cè)智能足球機(jī)器人系統(tǒng)多足步行機(jī)器人運(yùn)動(dòng)規(guī)劃與控制基于16/32位DSP機(jī)器人控制系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)仿人多指靈巧手及其操作控制機(jī)器人技術(shù)基礎(chǔ)機(jī)器人機(jī)構(gòu)學(xué)的數(shù)學(xué)
2015-02-22 07:34:56
機(jī)器人的運(yùn)動(dòng)原理還是屬于最基本的簡(jiǎn)單機(jī)械。機(jī)器人運(yùn)動(dòng)主要是依靠什么裝置?有些什么裝置是機(jī)器人用的比較多的?
2015-02-03 11:22:01
列舉部分學(xué)習(xí)過程中接觸的部分書籍,部分有中文版,部分有更新版本。1.機(jī)器人基礎(chǔ)書籍適合入門的書籍:機(jī)器人學(xué)機(jī)器人建模規(guī)劃與控制機(jī)器人學(xué)、機(jī)器視覺與控制——MATLAB算法基礎(chǔ)機(jī)器人學(xué)導(dǎo)論——分析控制
2019-05-22 06:53:10
現(xiàn)在想做機(jī)器人圖像識(shí)別方面的研究,有問題請(qǐng)教大家,比如說(shuō):現(xiàn)在有十種瓶子,機(jī)器人能識(shí)別我指定的瓶子,并把它從A位置移動(dòng)到B位置,關(guān)鍵是如何識(shí)別呢,不是很清楚,求大神指點(diǎn)!在此感激不盡!
2019-11-04 09:02:57
想弄一個(gè)vi可以動(dòng)態(tài)顯示機(jī)器人的姿態(tài),但不知道有什么函數(shù)可以引入機(jī)器人的模型,幫幫忙,謝謝。
2012-02-11 17:25:22
移動(dòng)機(jī)器人有沒有推薦的MCU,萌新求大佬幫助
2020-11-03 11:41:09
各位論壇前輩你們好,我是一名在校的即將升入大二學(xué)生,專業(yè)課暫時(shí)只學(xué)了c,電路分析基礎(chǔ)和工程制圖。我跟另外4個(gè)同學(xué)正在參加學(xué)校的機(jī)器人比賽,在機(jī)器人創(chuàng)意表演方面,就突發(fā)奇想,是否能做一個(gè)可以彈簡(jiǎn)單
2017-05-22 17:09:06
ARM機(jī)械手臂有各種形狀和大小。機(jī)械臂是機(jī)器人的一部分,用來(lái)定位末端執(zhí)行器和傳感器來(lái)完成編程任務(wù)。許多(但不是全部)類似于人類的手臂,有肩膀,肘部,手腕,甚至手指。這給了機(jī)器人很多方法來(lái)定位它自己在它
2022-03-31 10:31:31
機(jī)器人有哪些種類?大家來(lái)說(shuō)說(shuō)
2014-12-25 10:01:32
機(jī)器人有哪些類型?
2021-06-18 06:41:57
現(xiàn)在的機(jī)器人使用的電機(jī)多是什么品牌的呀,還是自己根據(jù)需求定制的呀?
2016-03-15 10:37:57
空間區(qū)域。其形狀取決于機(jī)器人的自由度數(shù)和各運(yùn)動(dòng)關(guān)節(jié)的類型與配置。機(jī)器人的工作空間通常用圖解法和解析法兩種方法進(jìn)行表示。 4、工作速度 機(jī)器人在工作載荷條件下、勻速運(yùn)動(dòng)過程中,機(jī)械接口中心或工具中心點(diǎn)在單位時(shí)間內(nèi)所移動(dòng)的距離或轉(zhuǎn)動(dòng)的角度。`
2017-08-15 14:00:52
機(jī)器人的優(yōu)缺點(diǎn)有哪些?機(jī)器人是由哪些部分組成的?
2021-10-11 07:51:29
機(jī)器人的定義是什么?機(jī)器人優(yōu)點(diǎn)和缺點(diǎn)是什么?機(jī)器人是由哪些部分組成的?工業(yè)機(jī)器人的應(yīng)用有哪些?
2021-07-05 06:48:21
安靜高效的機(jī)器人正在接管——阻止它們已經(jīng)太遲了。不,這不是機(jī)器人世界末日另一個(gè)可怕的故事。這是關(guān)于您下一設(shè)計(jì)硬件預(yù)算和規(guī)劃面臨威脅的問題。雖然您無(wú)法阻礙技術(shù)變革,但是您可以預(yù)測(cè)其影響。
2019-07-17 08:08:16
機(jī)器人的移動(dòng)通常是從管理機(jī)器人總體任務(wù)進(jìn)度的中央處理器發(fā)出位置變化請(qǐng)求時(shí)開始的。導(dǎo)航系統(tǒng)通過制定行程計(jì)劃或軌跡以開始執(zhí)行位置變化請(qǐng)求。行程計(jì)劃需考慮可用路徑、已知障礙位置、機(jī)器人能力及任何相關(guān)的任務(wù)目標(biāo)。
2019-09-10 10:44:32
機(jī)器人路徑規(guī)劃學(xué)習(xí)者一枚,誰(shuí)了解現(xiàn)在最新的路徑規(guī)劃方法及實(shí)現(xiàn),求指教,不勝感激啊。。。。。。。。。。。
2013-09-03 21:15:09
有人會(huì)用labview調(diào)用python嗎,或者有其他方法能實(shí)現(xiàn)這個(gè)要求?我在labview做了一個(gè)磁場(chǎng)發(fā)生的程序,驅(qū)動(dòng)磁機(jī)器人運(yùn)動(dòng),而且我這個(gè)機(jī)器人是繞著一個(gè)向量旋轉(zhuǎn)向前的,就輸入幅值頻率那些就可以
2022-11-18 16:21:25
基于soildwork繪制的3D機(jī)器人模型,要求實(shí)際的機(jī)器人在運(yùn)動(dòng)時(shí),將3D的模型加載在LABVIEW中,與實(shí)際機(jī)器人同步動(dòng)作,做運(yùn)動(dòng)演示。
2013-02-28 16:51:41
將系統(tǒng)分為算法實(shí)現(xiàn)和仿真模塊、DSP控制模塊、及機(jī)器人驅(qū)動(dòng)模塊,以驗(yàn)證算法的有效性。
KUKA KRAGILUS工業(yè)機(jī)器人的實(shí)體控制測(cè)試:最終,項(xiàng)目工業(yè)機(jī)器人的實(shí)體控制。在LabVIEW建立的3D仿真
2023-12-21 20:03:18
`1、 教學(xué)領(lǐng)域:1) 計(jì)算機(jī):可用NAO機(jī)器人驗(yàn)證代碼,編寫相關(guān)程序,以及3D仿真與實(shí)體之間的邏輯關(guān)系;2) 自動(dòng)化:研究個(gè)體和多機(jī)器人控制,以及多種傳感器信息融合;3) 機(jī)械:機(jī)械結(jié)構(gòu)設(shè)計(jì)
2015-02-12 15:17:18
和即時(shí)定位問題,而自主導(dǎo)航需要解決的是智能移動(dòng)機(jī)器人與環(huán)境進(jìn)行自主交互,尤其是點(diǎn)到點(diǎn)自主移動(dòng)的問題,這需要更多的技術(shù)支持。 要想解決機(jī)器人智能移動(dòng)這個(gè)問題,除了要有SLAM技術(shù)之外,還需要加入路徑規(guī)劃
2018-08-24 16:56:24
描述此參考設(shè)計(jì)由 QVGA 分辨率 3D 飛行時(shí)間 (ToF) 傳感器 OPT8241 和 ToF 控制器 OPT9221 組成,展示了 TI 3D ToF 解決方案在掃地機(jī)器人的類似配置和環(huán)境下
2018-10-11 15:37:51
機(jī)器人提供在未來(lái)經(jīng)濟(jì)中獲得成功的必要技能”。簡(jiǎn)單來(lái)說(shuō),美國(guó)工業(yè)知覺公司的機(jī)器人基于工業(yè)感知技術(shù)打造,能夠幫助包裝及裝卸貨物。與此同時(shí),該公司所研發(fā)的3D視覺系統(tǒng)(3D vision systems)能夠
2014-12-30 16:31:19
我現(xiàn)在做這個(gè)機(jī)器人的路徑規(guī)劃,有一個(gè)人工勢(shì)場(chǎng)的算法,已經(jīng)用C實(shí)現(xiàn)算法,請(qǐng)問一下能否用這個(gè)labview仿真,就是給定一些起始點(diǎn),終點(diǎn),還有這個(gè)障礙物的坐標(biāo),中間是這個(gè)算法計(jì)算出來(lái)的一些點(diǎn),能夠在執(zhí)行算法的時(shí)候用labview描出這些點(diǎn),最終形成一條規(guī)劃好的路徑。
2015-04-22 16:04:32
完善這個(gè)作品。主要運(yùn)用的算法1、D-H參數(shù)模型2、三軸姿態(tài)解算3、六次項(xiàng)足跡規(guī)劃4、步態(tài)規(guī)劃5、平臺(tái)姿態(tài)解算即18軸加平面軸解算(未完成)知識(shí)點(diǎn)1、運(yùn)動(dòng)學(xué)2、機(jī)器人學(xué)3、數(shù)學(xué)基礎(chǔ)知識(shí)(矩陣、三角函數(shù)、坐標(biāo)系
2014-03-27 18:51:05
集中于串聯(lián)式的工業(yè)機(jī)器人的理論與工程應(yīng)用。雖然串聯(lián)機(jī)器人具有諸多優(yōu)點(diǎn),但同時(shí)也有些問題函待解決。本文介紹了一種新型的串并聯(lián)噴涂機(jī)器人的結(jié)構(gòu)設(shè)計(jì),并對(duì)其運(yùn)動(dòng)學(xué)、誤差建模、誤差補(bǔ)償和軌跡規(guī)劃進(jìn)行了分析
2017-07-13 16:03:16
,正在選取合適的AI加速系統(tǒng),工業(yè)用品,有小巧,穩(wěn)定,成本等方面考慮,正在選型。 ④項(xiàng)目開展,按時(shí)間計(jì)劃實(shí)施。⑤項(xiàng)目調(diào)試,優(yōu)化,分享。 預(yù)計(jì)成果 完成基于機(jī)器視覺的工業(yè)機(jī)器人抓取工作站,并拿出基于機(jī)器視覺的工業(yè)機(jī)器人抓取路徑規(guī)劃方案的典型應(yīng)用作為核心技術(shù),加以推廣。
2019-09-18 14:18:14
項(xiàng)目名稱:協(xié)作機(jī)器人試用計(jì)劃:協(xié)作機(jī)器人1、用于無(wú)線示教器傳輸;2、開發(fā)人機(jī)交互;3、3D模型傳輸。
2020-08-11 13:57:36
項(xiàng)目名稱:機(jī)器人試用計(jì)劃:1.熟悉開發(fā)板2.將開發(fā)板試用過程寫成帖子分享出來(lái)3.將板子加入到已經(jīng)做好的3d打印機(jī)器人中,實(shí)現(xiàn)控制。分享控制方法
2017-05-23 14:26:43
過程③本項(xiàng)目已經(jīng)初具雛形,正在選取合適的AI加速系統(tǒng),工業(yè)用品,有小巧,穩(wěn)定,成本等方面考慮,正在選型。④項(xiàng)目開展,按時(shí)間計(jì)劃實(shí)施。⑤項(xiàng)目調(diào)試,優(yōu)化,分享。預(yù)計(jì)成果完成基于機(jī)器視覺的工業(yè)機(jī)器人抓取工作站,并拿出基于機(jī)器視覺的工業(yè)機(jī)器人抓取路徑規(guī)劃方案的典型應(yīng)用作為核心技術(shù),加以推廣。
2019-09-18 19:24:11
的機(jī)器人,用來(lái)研究?jī)和缃话l(fā)展。第三個(gè)機(jī)器人是一個(gè)3D打印的人形機(jī)器人,名叫Marc(多驅(qū)動(dòng)機(jī)器人伴侶)。 研究者為三個(gè)機(jī)器人的程序中編入了“認(rèn)知偏差”,允許機(jī)器人犯錯(cuò)誤,做出錯(cuò)誤的假設(shè),還可以表達(dá)出
2015-12-28 14:42:31
Rooma系列掃地機(jī)器人在清潔領(lǐng)域有了很長(zhǎng)時(shí)間的發(fā)展,不過他們還不滿足于此。近日,iRobot公司表示公司將在機(jī)器人上安裝3D傳感器,為用戶提供更加智能的使用體驗(yàn)。通過3D傳感器,機(jī)器人可以更清楚地
2014-04-25 15:03:19
Rooma系列掃地機(jī)器人在清潔領(lǐng)域有了很長(zhǎng)時(shí)間的發(fā)展,不過他們還不滿足于此。近日,iRobot公司表示公司將在機(jī)器人上安裝3D傳感器,為用戶提供更加智能的使用體驗(yàn)。通過3D傳感器,機(jī)器人可以更清楚地
2014-04-25 15:05:09
,機(jī)器人密度(每萬(wàn)名員工使用機(jī)器人臺(tái)數(shù))達(dá)到100以上。事實(shí)上,各地***的規(guī)劃早已超出了這個(gè)《指導(dǎo)意見》。 從提出的目標(biāo)來(lái)看,各地均胸懷“遠(yuǎn)大抱負(fù)”。如安徽的發(fā)展目標(biāo)是到2015年培育3~5家產(chǎn)值超50
2015-12-29 15:56:47
` 山東昊威機(jī)器人有限公司的書法機(jī)器人在展會(huì)上可謂是吸睛神器,小伙伴們紛紛前來(lái)圍觀,這不,國(guó)際友人都不禁為我們昊威書法機(jī)器人手動(dòng)點(diǎn)贊啦!!!厲害啦我的機(jī)器人。`
2017-08-11 11:48:54
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-10-11 09:38:12
隨著很多全新技術(shù)的涌現(xiàn),人們?cè)絹?lái)越需要用3D方法來(lái)表示現(xiàn)實(shí)世界中的物體。特別是機(jī)器視覺和機(jī)器人技術(shù),它們都得益于精確和自適應(yīng)的3D捕捉功能。其它針對(duì)3D掃描的應(yīng)用包括生物識(shí)別、安防、工業(yè)檢查、質(zhì)量
2022-11-16 07:48:07
我今年大一計(jì)算機(jī)專業(yè) 想做那種清理垃圾機(jī)器人帶機(jī)械手臂的。。正在放寒假想學(xué)點(diǎn)東西準(zhǔn)備一下但網(wǎng)上說(shuō)的太籠統(tǒng) 而且網(wǎng)絡(luò)普遍都一樣的所以想請(qǐng)教一下 各位高機(jī)器人的我應(yīng)該從何學(xué)起 我們就算是一個(gè)隊(duì)伍吧一共8
2016-01-19 13:44:49
《先進(jìn)機(jī)器人控制》從控制的角度系統(tǒng)地介紹了機(jī)器人學(xué)的基礎(chǔ)知識(shí)和當(dāng)前的發(fā)展?fàn)顩r。全書共分為12章,由基礎(chǔ)篇、控制結(jié)構(gòu)篇和先進(jìn)控制篇構(gòu)成。基礎(chǔ)篇著重介紹串聯(lián)關(guān)節(jié)機(jī)器人的運(yùn)動(dòng)學(xué)、運(yùn)動(dòng)規(guī)劃和動(dòng)力學(xué)。其中
2017-09-19 15:30:57
工業(yè)機(jī)器人的四大特征是哪些?工業(yè)機(jī)器人是由哪些部分組成的?工業(yè)機(jī)器人是怎樣進(jìn)行劃分的?
2021-10-11 09:10:17
本菜鳥剛學(xué)機(jī)器人控制,對(duì)于兩關(guān)節(jié)機(jī)器人,實(shí)現(xiàn)既定的末端軌跡,軌跡規(guī)劃已完成,但是程序的延時(shí)不準(zhǔn)確,導(dǎo)致最終軌跡混亂,求大神破?
2015-04-29 16:21:23
求一套寫字機(jī)器人的程序,用arduino編寫的。怎么實(shí)現(xiàn)
2020-10-17 15:20:25
方便。這樣的一套機(jī)器人套件可以搭建出無(wú)數(shù)種機(jī)器人構(gòu)型!“創(chuàng)意之星™”機(jī)器人套件配有《構(gòu)型搭建指南》和《機(jī)器人編程實(shí)驗(yàn)指導(dǎo)書》等文檔,并提供所有構(gòu)件的3D模型,以及20多種典型構(gòu)型
2011-03-05 10:54:52
對(duì)機(jī)器人技術(shù)有更加深入的認(rèn)識(shí)和了解以及實(shí)際操作能力得到較大提高,具備機(jī)器人行業(yè)公司及相關(guān)單位對(duì)從業(yè)人員的技術(shù)條件要求。 3、工業(yè)機(jī)器人專業(yè)人才稀缺,就業(yè)優(yōu)勢(shì)明顯。本專業(yè)人才全部依賴機(jī)器人廠商內(nèi)部培訓(xùn)
2015-09-02 14:03:18
模型在平面上的軌跡優(yōu)化方法,并完成了實(shí)驗(yàn)研究。2001年,Arikan等人開發(fā)了一種噴涂機(jī)器人離線編程系統(tǒng),實(shí)現(xiàn)了在線控制涂層厚度。2005年,Sheng等人提出了復(fù)雜自由曲面上噴涂機(jī)器人噴槍路徑規(guī)劃
2021-03-10 09:23:59
`這是創(chuàng)客集結(jié)號(hào)的作品四足機(jī)器人身體和四足都是通過3D打印技術(shù)打印出來(lái)的,通過自己安裝連接上超聲波傳感器,制作成功的四足機(jī)器人完全就很了。`
2018-09-29 09:55:09
在AltiumDesigner?中使用PCB庫(kù)編輯器中包含的線條拉伸,圓柱和球形形狀類型創(chuàng)建逼真的3D機(jī)械形狀通常非常簡(jiǎn)單。但是,有些形狀可能很棘手。 本文是一個(gè)客戶要求的創(chuàng)建環(huán)形線圈過程的例子。
2021-01-08 07:10:16
描述AR.LO - Arduino 3D 打印機(jī)器人AR.LO 是一款基于 Arduino 的 3D 打印 2 輪機(jī)器人。它具有:OLED 顯示屏、超聲波傳感器、藍(lán)牙模塊和 2 個(gè)改進(jìn)的伺服電機(jī)
2022-08-12 07:55:16
移動(dòng)機(jī)器人利用導(dǎo)航技術(shù),獲得機(jī)器人的目前所處的位置,結(jié)合傳感器技術(shù)對(duì)周圍外界環(huán)境(障礙物等)作實(shí)時(shí)探測(cè),并根據(jù)環(huán)境提供的信息規(guī)劃一條可行路徑完成達(dá)到目標(biāo)點(diǎn)的任務(wù)。移動(dòng)機(jī)器人技術(shù)涉及到傳感器技術(shù)
2020-11-23 15:08:52
應(yīng)用對(duì)象相結(jié)合后的系統(tǒng),其是硬件和軟件緊密捆綁在一起的系統(tǒng)。將嵌入式系統(tǒng)應(yīng)用于滅火機(jī)器人的設(shè)計(jì)中,對(duì)機(jī)器人的性能智能化、網(wǎng)絡(luò)化、小型化都有了明顯提高。比賽用滅火機(jī)器人需要機(jī)器人有智能較高的自動(dòng)控制
2019-07-31 06:23:18
的問題,運(yùn)行起來(lái)必然高效自如。大家還知道其他關(guān)于機(jī)器人線束連接可靠的方法么?或者說(shuō)確保機(jī)器人質(zhì)量性能的有效方法和制造模式等等。有興趣的都可以在這里分享,歡迎各位一起參與討論~ `
2017-04-25 16:34:23
可以為用戶播放音樂、電影、語(yǔ)音識(shí)別聊天等,而且還會(huì)抓取網(wǎng)絡(luò)新聞、發(fā)送微博、郵件、生成掃描二維碼、文字提取等功能都已經(jīng)可以實(shí)現(xiàn)。另外該機(jī)器人已經(jīng)實(shí)現(xiàn)了自主無(wú)線充電。1.引言在互聯(lián)網(wǎng)高速發(fā)展的現(xiàn)在
2019-10-09 20:32:08
用的是矩陣代數(shù)、迭代或幾何方法ob在此不作具體介紹。對(duì)于高速、高精度機(jī)器人,還必須建立動(dòng)力學(xué)模型,由于目前通用的工業(yè)機(jī)器人(包括焊接機(jī)器人)最大的運(yùn)動(dòng)速度都在3m/s內(nèi),精度都不高于O.1mm,所以都只做
2017-12-15 10:25:19
進(jìn)行通訊。機(jī)器人控制器(RC)的主計(jì)算機(jī)完成機(jī)器人的運(yùn)動(dòng)規(guī)劃、插補(bǔ)和位置伺服以及主控邏輯、數(shù)字I/O、傳感器處理等功能,而編程示教盒完成信息的顯示和按鍵的輸入。 (2)模塊化層次化的控制器軟件系統(tǒng)
2018-11-23 10:40:38
關(guān)于ros智能機(jī)器人,就是一個(gè)寫智能機(jī)器人代碼的一個(gè)虛擬機(jī),
2021-10-13 19:20:16
。其中,掃地機(jī)器人針對(duì)的目標(biāo)用戶是所有家庭,產(chǎn)品的需求痛點(diǎn)是為了解放繁忙的人類,解放雙手,用更智能化的機(jī)器代替人。近年來(lái),國(guó)家相關(guān)部門不斷加大對(duì)機(jī)器人產(chǎn)業(yè)的扶持力度。《國(guó)家中長(zhǎng)期科學(xué)和技術(shù)發(fā)展規(guī)劃綱要
2017-05-27 13:31:20
智能監(jiān)控機(jī)器人是近年來(lái)機(jī)器人應(yīng)用工程中一項(xiàng)前沿性的題目,智能化探測(cè)小車是智能行走機(jī)器人的一種。智能監(jiān)控機(jī)器小車就是針對(duì)上述情況,在參考了目前大多數(shù)智能機(jī)器人的基礎(chǔ)上,以降低成本為原則設(shè)計(jì)的。小車具備
2019-10-14 07:37:52
20世紀(jì)以來(lái)隨著電子技術(shù)的不斷發(fā)展,以及人類對(duì)于自身的不斷了解,機(jī)器人的研究也在不斷的深入。現(xiàn)階段能做出外表接近人類的機(jī)器人,走路接近人類的機(jī)器人……但這些都屬于很前沿的領(lǐng)域,研究門檻高,實(shí)際的商業(yè)用途不是很廣,所以大多還停留在樣品階段,走進(jìn)市場(chǎng)的很少。
2019-10-16 08:27:30
跟蹤等領(lǐng)域。不同種類的機(jī)器人由于工作的重點(diǎn)不一樣,它的視覺系統(tǒng)在軟件或硬件上都有著細(xì)微的差別。本文研究基于服務(wù)機(jī)器人的單目視覺系統(tǒng)。它處理的是二維圖像,是基于對(duì)無(wú)遮擋物體顏色和形狀的識(shí)別以及3D目標(biāo)物體的平動(dòng)跟蹤。
2020-04-07 07:27:24
視覺系統(tǒng)的發(fā)展趨勢(shì)怎么樣?3D視覺系統(tǒng)應(yīng)用在哪些方面?未來(lái)的機(jī)器人3D視覺系統(tǒng)將會(huì)發(fā)生什么樣的變化?
2021-05-11 06:40:14
中游刃有余。D*算法的最大優(yōu)點(diǎn)是不需要預(yù)先探明地圖,機(jī)器人可以和人一樣,即使在未知環(huán)境中,也可以展開行動(dòng),隨著機(jī)器人不斷探索,路徑也會(huì)時(shí)刻調(diào)整。以上是目前大部分移動(dòng)機(jī)器人都需要的路徑規(guī)劃算法,而掃地機(jī)器人
2017-08-01 13:50:56
導(dǎo)讀: 物聯(lián)網(wǎng)、增強(qiáng)現(xiàn)實(shí)(AR)、3D打印和機(jī)器人技術(shù),曾經(jīng)只能在科幻電影里看到的黑科技,正在逐漸走進(jìn)我們的生活。由口袋妖怪到AR紅包,越來(lái)越多的新技術(shù)在不斷走進(jìn)我們的生活!似乎每過一天,新技術(shù)就變
2017-10-19 09:18:04
性可能會(huì)令之變成雞肋。畢竟讓毛茸茸的玩偶小馬動(dòng)起來(lái)容易,但要讓一只木馬動(dòng)起來(lái),木頭估計(jì)都折了,那還有什么意義?那么,作為機(jī)器人過渡的機(jī)器人皮,或許也該有一種自己的過渡方式。3D打印或許是機(jī)器人皮的完美
2018-09-26 09:01:55
現(xiàn)在做畢業(yè)設(shè)計(jì),是基于labview的挖掘機(jī)器人軌跡規(guī)劃與控制,就是用labview來(lái)實(shí)現(xiàn)軌跡規(guī)劃的編程,請(qǐng)教各位,這容易實(shí)現(xiàn)嗎?該從哪入手啊?謝謝了!
2013-04-01 14:32:01
工作空間上的限制來(lái)確定運(yùn)動(dòng)軸數(shù)目及各自運(yùn)動(dòng)行程。 3.規(guī)劃運(yùn)動(dòng)軌跡及計(jì)算運(yùn)動(dòng)速度 根據(jù)機(jī)器人的工作任務(wù)和空間限制來(lái)規(guī)劃運(yùn)動(dòng)軌跡。盡可能減少運(yùn)動(dòng)間隔,對(duì)工作周期要求嚴(yán)的應(yīng)用要盡可能運(yùn)用多軸同時(shí)運(yùn)動(dòng)來(lái)
2017-08-16 11:31:54
` 本帖最后由 dfood 于 2015-2-13 16:41 編輯
自己做的3D打印機(jī)器人`
2015-02-13 16:17:33
廣東省計(jì)算機(jī)協(xié)會(huì)智能軟件與機(jī)器人分會(huì)舉辦首屆表情機(jī)器人大賽,大賽官網(wǎng):http://www.maskrobot.org/表情機(jī)器人網(wǎng)絡(luò)大賽近日,廣東省計(jì)算機(jī)協(xié)會(huì)智能軟件與機(jī)器人分會(huì)舉辦的表情機(jī)器人
2012-09-15 09:44:26
表情機(jī)器人網(wǎng)絡(luò)大賽近日,廣東省計(jì)算機(jī)協(xié)會(huì)智能軟件與機(jī)器人分會(huì)舉辦的表情機(jī)器人創(chuàng)意設(shè)計(jì)全國(guó)大賽于2012年9月1日正式開始,比賽歷時(shí)三個(gè)月零七天,大賽邀請(qǐng)了華南理工大學(xué)軟件學(xué)院的朱金輝博士
2012-09-11 09:17:04
3D地圖中,也是靠這種方法定位。 無(wú)人車激光雷達(dá)生成定位地圖那萬(wàn)一機(jī)器人走進(jìn)溝里、爬樹上了怎么辦?我們也有對(duì)策。平面中,常用二維柵格地圖,地圖會(huì)被切成一個(gè)個(gè)小格。 我們可以用“0”和“1”來(lái)表示這個(gè)
2018-05-11 11:51:27
我是新人,求幫助啊,明天需要提交輪式機(jī)器人應(yīng)用的報(bào)告,求大神給點(diǎn)建議,可用輪式機(jī)器人應(yīng)用于那些方面,要求實(shí)際可行,應(yīng)用于生活,農(nóng)業(yè),軍事都可以,謝謝啦
2013-04-17 16:32:16
以軟體機(jī)器人為背景和主題,深入講解:(1) 軟體機(jī)器人的關(guān)節(jié)設(shè)計(jì)方法;(2) 有限元分析技巧;(3) 力學(xué)模型的建立方法; (4) 基于MATLAB與視覺識(shí)別技術(shù)的軟體手柔性抓取控制與實(shí)驗(yàn)等內(nèi)容
2019-08-12 15:09:17
江智黨建機(jī)器人是經(jīng)過多年的市場(chǎng)沉淀 ;現(xiàn)已可以提供系統(tǒng) 全方位的黨建機(jī)器人服務(wù)
2022-06-21 07:59:59
泰科關(guān)節(jié)機(jī)器人具備哪些優(yōu)勢(shì)? 一、編程簡(jiǎn)單可以讓無(wú)編程經(jīng)驗(yàn)的操作人員能快速設(shè)置和操作我們的直觀、3D 可視化協(xié)作式機(jī)器人。只需將機(jī)器人手臂移動(dòng)至需要的位置,或觸摸方便易用的觸屏
2023-04-19 15:13:28
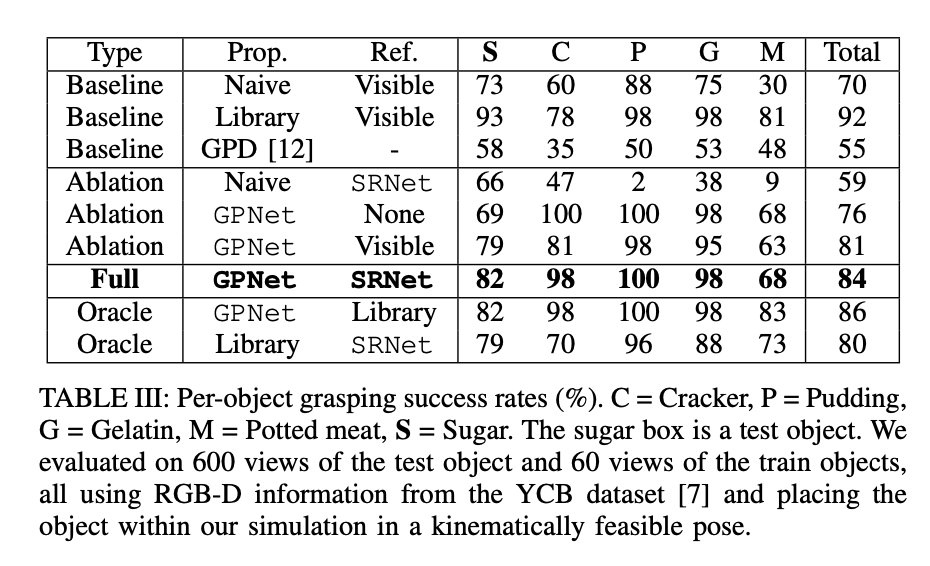
本文主要研究3D視覺技術(shù)在機(jī)器人抓取作業(yè)中的應(yīng)用,總結(jié)了3D視覺技術(shù)在識(shí)別、定位物體時(shí)面臨的挑戰(zhàn),給出了抓取作業(yè)機(jī)器人3D視覺系統(tǒng)的設(shè)計(jì)方法。
2019-07-25 08:43:10 6744
6744 抓取綜合方法是機(jī)器人抓取問題的核心,本文從抓取檢測(cè)、視覺伺服和動(dòng)態(tài)抓取等角度進(jìn)行討論,提出了多種抓取方法。各位對(duì)機(jī)器人識(shí)別抓取感興趣的小伙伴,一定要來(lái)看一看!千萬(wàn)別錯(cuò)過~
2023-08-19 17:19:46926 
本文還引入了多視角一致性優(yōu)化模塊,以提高學(xué)習(xí)到的射線-表面距離場(chǎng)在不同視角下的一致性。通過在多個(gè)數(shù)據(jù)集上的實(shí)驗(yàn)證明,RayDF方法在三維形狀重建的準(zhǔn)確性和效率方面優(yōu)于現(xiàn)有的方法。
2023-11-10 15:04:14238 
 電子發(fā)燒友App
電子發(fā)燒友App














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論