本菜鳥剛學機器人控制,對于兩關節機器人,實現既定的末端軌跡,軌跡規劃已完成,但是程序的延時不準確,導致最終軌跡混亂,求大神破?
2015-04-29 16:21:23
控制在-20°C至+60°C內;85%以內,放置在無塵、潔凈、無腐蝕性氣體、無研磨液、無金屬粉末、無油的環境中; 4、要嚴格按照直流力矩電機清理和維護過程的流程說明來操作了,嚴格使用清潔過程要求
2018-06-21 09:07:02
力矩電機轉子識別以后,1016產生數值,保存數據上電以后,給軸加使能(有電流聲)沒有報警,在手動運轉該軸時,出現300608報警,更改電流限制參數1105后,該情況依然出現。請高手指點,謝謝~!
2023-12-28 07:44:42
在機器人的設計中,機器人的靈巧程度很重要。而人最靈巧的莫過于手指,而手指的靈巧性取決于手指的機械結構和電機驅動設計。這里簡要的介紹了機器人手指的電氣系統,詳細的描述了機器人手指關節的電機驅動設計。
2016-01-14 10:34:55
機器人關節是機器人各個零部件之間發生相對運動的機構。關節之中,單獨驅動的為主動關節,反之稱為從動關節。機器人關節模組通常采用超聲波電機、伺服電機、諧波減速器、VR減速器、行星齒輪箱電機等。機器人關節電機
2021-05-27 11:26:11
現在的機器人使用的電機多是什么品牌的呀,還是自己根據需求定制的呀?
2016-03-15 10:37:57
直流電機如何實現驅動控制?機器人上到底用什么電機好?
2021-10-13 07:43:29
`在論壇看到了那個波士頓動力公司的斑點 獵豹 大狗 野貓 這幾種軍用機器人,也看了那些個測試視頻,他們的那些關節結構是怎樣設計的啊?是液壓還是機械?`
2015-03-09 11:41:04
改良以適應實際的市場應用。 5. 無刷直流電機無刷直流電機(BLDCM)是在有刷直流電機的基礎上發展來的,但它的驅動電流是不折不扣的交流;無刷直流電機又可以分為無刷速率電機和無刷力矩電機。一般
2018-10-10 18:01:45
ABB機器人伺服電機維修常見故障是什么?
2021-09-29 06:48:18
研究生一枚,現在導師的項目需要用DSP來控制直流力矩電機。自己什么都不太懂,現在想入手一塊開發板,請求各位推薦。謝謝,感激不盡呀!
2017-09-01 21:41:56
摘要我們提出了一個新的開源機器人的腿部力矩控制系統,這個系統的特點是低成本及結構簡單。這個系統由高力矩無刷直流舵機和適合阻抗調節和力矩控制的低傳動結構組成。同時我們也設計了一個適應沖撞的新型足底
2021-09-13 06:33:53
要因素要考慮。幾乎對于所有小型到中型等大小的機器人驅動器來說,驅動電機的選擇通常有刷直流電機、無刷直流電機(BLDC)和步進電機。(然而,某些情形下液壓與氣壓機才是最好的選擇。)有刷直流電機是最古老
2019-08-10 08:30:00
在機器人中,執行機構一般分為液壓驅動和電機驅動兩種類型,其中又以電機驅動最為常見。本文主要討論一般機器人驅動機構中電機的選擇問題。機器人中常用的電機分為有刷直流電機、無刷直流電機、永磁
2021-09-01 06:12:56
在機器人中,執行機構一般分為液壓驅動和電機驅動兩種類型,其中又以電機驅動最為常見。本文主要討論一般機器人驅動機構中電機的選擇問題。機器人中常用的電機分為有刷直流電機、無刷直流電機、永磁同步電機、步進電機等。其中在中小型機器人(尺寸在15cm-30cm)中,由于價格便宜,...
2021-08-27 07:46:37
小型機器人,20cm左右的,現在有沒有球形關節元件?
2015-09-04 11:27:17
高速、高精度的任務。使用相機、力傳感器和其他感知元件,機器人可以感知到人存在并做出相應動作避免對人造成傷害。某些情況下,力矩傳感器被放置在電機減速箱的后面來直接檢測外部力矩的任何快速增加的變化;而其
2018-10-12 11:02:18
如何對采集機器人的關節位置及TCP位置進行虛擬仿真?
2021-10-08 06:31:46
說起對工業機器人的性能要求,無非就是“快、準、狠”三字。其實這也就是對機器人關節伺服電機的要求,今天我們就來拆解一下這三字背后的含義。其中“快”、“準”的意思大家都非常好了解,就是要求伺服電機
2018-10-15 10:16:14
想做一個助力下肢外骨骼,想用力矩電機做關節驅動,信號提取模塊做好了,想請教大神,如何用單片機控制力矩電機,二者間加個什么控制電路?謝啦
2014-04-13 14:14:30
youshuang ding在機器人中,執行機構一般分為液壓驅動和電機驅動兩種類型,其中又以電機驅動最為常見。本文主要討論一般機器人驅動機構中電機的選擇問題。機器人中常用的電機分為有刷直流電機、無刷
2018-10-19 10:31:20
如何選擇掃地機器人的電機?
2021-03-02 07:05:22
機器人電動伺服驅動系統是利用各種電機產生的力矩和力,好直接或間接地驅動機器人本體以獲得機器人的各種運動的執行機構。 對工業機器人關節驅動的電動機,要求有最大功率質量比和扭矩慣量比、高起動轉矩、低
2015-01-23 14:33:53
伺服系統分為直流、交流和步進系統以及包括直線伺服在內的其他伺服系統。直流電機電刷容易磨損形成火花。步進電機由于功率不大,一般用于低精度小功率機器人。交流伺服電機驅動器具有轉矩慣量比高、無電刷等優勢
2017-08-23 15:10:27
工具(如焊槍、噴嘴、機加工刀具、夾爪)與主構架的連接機構,它具有3個自由度。 驅動系統為機器人各運動部件提供力、力矩、速度、加速度。 測量系統用于機器人運動部件的位移、速度和加速度的測量。 控制器(RC
2015-01-19 10:36:12
基本一致,只是大小不太一樣,例如iiwa的每個軸基本都是下圖這樣:每一個關節中都包含了電機、伺服驅動、諧波減速器、電機端編碼器、關節端位置傳感器和力矩傳感器,電機和減速器采用直連。整個關節在機器人內部
2018-11-01 11:08:12
機器人動態特性的有效方法。目前有許多方法用來增加結構件材料的阻尼,其中最適合機器人采用的一種方法是用粘彈性大阻尼材料對原構件進行約束層阻尼處理。四、機器人主要結構㈠、機器人驅動裝置概念:要使機器人運行
2018-10-12 10:16:22
我正在設計一個帶有CSG324封裝的Spartan6的FR-4 PCB。該板用于海底安裝,應具有25年以上的使用壽命。哪種PCB表面處理最適合此應用?我相信ENIG在平坦度方面是最好的,但我相信無鉛HASL可以提供最佳的長期焊點可靠性。電路板在其使用壽命期間可能會受到一些振動。任何想法/建議?謝謝
2019-07-31 06:28:33
`隨著中國科學技術發展迅猛,未來中國將成為為微型智能機器人大國。如今智能機器人需求量不斷增長,其控制系統和自動化主要的產品超聲波電機的需求也將大幅度增長,機器人手指關節用超聲波電機作為微型智能機器人
2020-11-02 11:21:13
超聲波電機一般安裝在機器人手指關節處,機器人的關節驅動離不開伺服系統,機器人關節越多,對柔性及精準度就越高,所需的超聲電機數量就越多。機器人對關節驅動電機的要求非常嚴格,因為超聲波電機具有以下優勢
2020-11-24 11:30:02
說起對工業機器人的性能要求,無非就是“快、準、狠”三字。其實這也就是對機器人關節伺服電機的要求,今天我們就來拆解一下這三字背后的含義。其中“快”、“準”的意思大家都非常好了解,就是要求伺服電機
2018-10-19 10:47:11
Ⅳ. 問題討論1) 設計選擇:設計一個低重量的四足機器人,同時保持有效的阻抗和力控制能力需要我們將這些功能相互協調地設計。我們設計一個新型足式機器人,使用無刷直流電機進行驅動,因為它們是一種高性能
2021-09-15 06:04:41
機器人運行起來, 需給各個關節即每個運動自由度安置傳動裝置 作用:提供機器人各部位、各關節動作的原動力。驅動系統:可以是液壓傳動、氣動傳動、電動傳動, 或者把它們結合起來應用的綜合系統; 可以是直接
2018-10-30 15:02:58
:要使機器人運行起來, 需給各個關節即每個運動自由度安置傳動裝置 作用:提供機器人各部位、各關節動作的原動力。驅動系統:可以是液壓傳動、氣動傳動、電動傳動, 或者把它們結合起來應用的綜合系統; 可以是直接
2018-10-30 15:11:29
模數轉換器(ADC)有很多規格,總是很難弄清哪種ADC才最適合既定應用。那么,選擇轉換器時只關注分辨率、信噪比(SNR)或者諧波是否可以?還有其他技術規格同樣舉足輕重嗎?
2019-01-15 16:29:12
常用的電機有哪些。機器人常用的電機包含三種:普通的直流電機、伺服電機、步進電機。直流電機1.直流電機輸出或輸入為直流電能的旋轉電機,稱為直流電機,它是能實現直流電能和機械能互相轉換的電機。當它作電動機
2018-10-25 11:50:39
Hi-FRDS什么樣的傳感器可以用來測量速度?哪種傳感器最適合測量速度?為什么?郵寄一些資料 以上來自于百度翻譯 以下為原文hi frds what type of sensors
2019-06-05 06:28:23
如何控制永磁直流力矩電機在加負載時自適應轉動?
2016-03-28 21:51:26
電機加蝸輪蝸桿結構、氣動方案作為機器人手指方案,這些方案普遍存在噪音、精度不準、體積大、堵轉燒機、斷電失效等情況。<span]超聲電機作為核心驅動部件作為機器人手指關節部件,可以做到靜音
2020-09-28 14:08:22
目前大多數智能機器人都以電磁電機作為關節執行器。由于電磁電機的轉速高,當作為關節驅動時,不得不使用減速機構來降速或增力,這不僅會增大機器人的機構尺寸,使得機器人結構變得復雜,并且也帶來伺服帶寬變窄
2020-12-10 11:09:26
大多數情況下,有刷直流電機是機器人技術中最不吸引人的選擇。無刷直流電機(圖2)是在20世紀60年代出現的,由于堅固,小巧,低成本的永磁體和小型高效的電子開關(通常是MOSFET)可以切換到繞組的電流
2019-03-12 15:52:12
在微型機器人行業中,微型電機的應用非常多,如:手指關節、臉部、機械臂,都是通過舵機連接微型電機來進行各種動作。常見的幾種電機有無刷電機、有刷電機、超聲波電機、同步電機、步進電機,其中超聲電機
2021-01-22 10:55:40
機械部件。廣泛應用在半導體,醫療,機床,印刷,轉臺,工廠自動化和機器人等領域。QTR-A 65 和 78 是我們力矩范圍中最小的電機,其中QTR-A 78-60
2022-09-21 16:20:30
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-17 15:02:00
RJU系列關節模組——面向商業、生活服務類應用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶
2023-04-17 16:25:29
RJS關節模組系列——面向教育科研應用 集成高性能伺服驅動器、直流無框力矩電機、高分辨率雙編碼器、諧波減速器、機械抱閘、力傳感器于一體,高效率發揮關節模組性能 創新開放 方便快捷
2023-04-17 17:53:17
RDM協作機器人關節伺服驅動模塊是一款基于FPGA 先進技術開發而成的高性能、直流供電、結構極其緊湊的全數字通用伺服驅動器,最大功率可達 1000W。通過EtherCAT/CANopen
2023-04-17 18:13:06
產品優勢專注機器人關節研發,RJS系列關節模組具有定位精度高、性能可靠等特點。 模塊化設計RJS關節模組集成無框電機、驅動器、諧波減速器、編碼器、制動器于一體,結構小巧緊湊,6軸RJS關節
2023-04-18 14:04:34
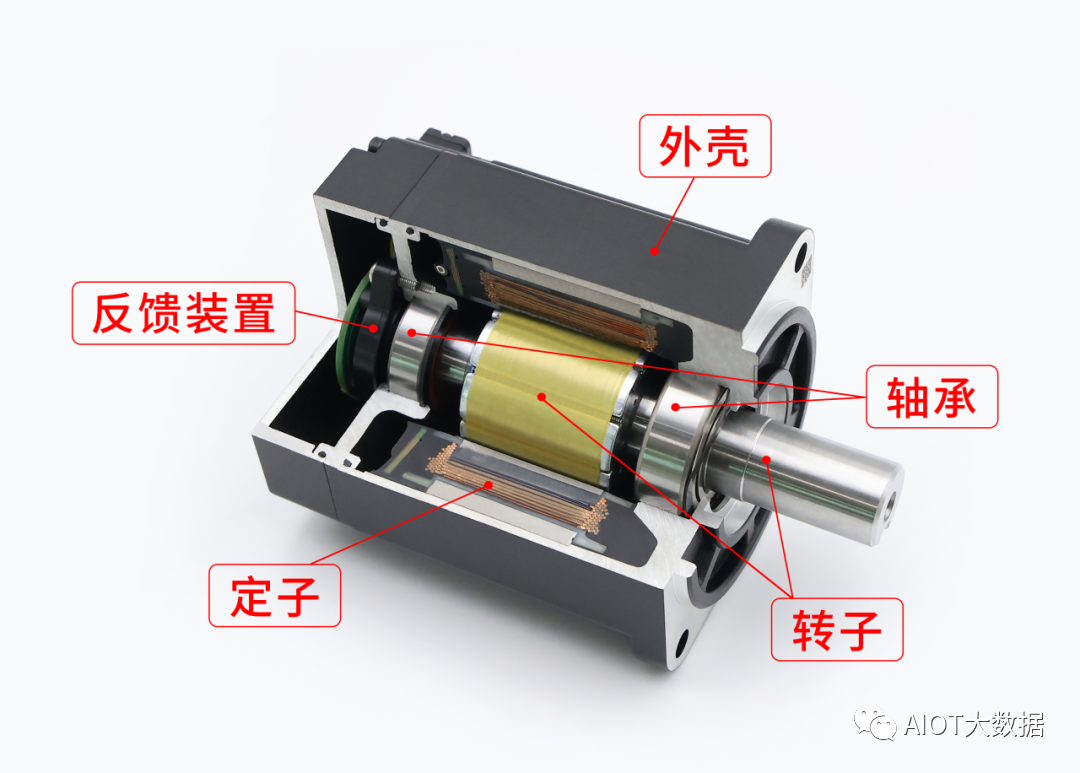
機器人關節電機是專業為機器人關節設計研發生產。電機既有中空大孔徑,能保證關節模組完美融合的組合, 電機的定轉子機構緊湊,轉子采用了高性能稀土永磁材料,此系列電機轉矩脈動極低,易于速度控制和精確
2023-04-18 17:35:19
RJU系列關節模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶可根據自身產品方向,自由定位
2023-04-19 10:48:11
RJU系列關節模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶可根據自身產品方向,自由定位
2023-04-19 10:53:03
泰科關節機器人具備哪些優勢? 一、編程簡單可以讓無編程經驗的操作人員能快速設置和操作我們的直觀、3D 可視化協作式機器人。只需將機器人手臂移動至需要的位置,或觸摸方便易用的觸屏
2023-04-19 15:13:28
RDM協作機器人關節伺服驅動模塊是一款基于FPGA 先進技術開發而成的高性能、直流供電、結構極其緊湊的全數字通用伺服驅動器,最大功率可達 1000W。通過EtherCAT/CANopen 總線控制
2023-04-19 15:39:40
機器人關節電機是專業為機器人關節設計研發生產。電機既有中空大孔徑,能保證關節模組完美融合的組合, 電機的定轉子機構緊湊,轉子采用了高性能稀土永磁材料,此系列電機轉矩脈動極低,易于速度控制和精確
2023-04-20 10:07:10
簡要介紹了直流力矩電機的工作原理C詳細討論了直流力矩電機的特點及其在精密跟蹤雷達伺服系統中的應用.
2011-05-24 15:08:06 52
52 基于模糊PID的直流力矩電機轉速控制-2004。
2016-04-05 16:25:0922 大族電機-力矩電機
2016-12-25 22:33:350 的聯合研發能力,對機器人關節、醫療機器人、傳感器萬向節和制導系統等關鍵的運動控制應用,都能提供最合適且性能卓越的電機。
2019-10-25 08:00:008 本文先后闡述了伺服電機和力矩電機特點及原理。隨后分析了伺服電機和力矩電機的區別。
2019-12-30 11:37:01 11901
11901 TF電機在機器人應用中非常多,如機器人的關節活動、行走、各種動作等等都是需要微型電機來驅動的。拋開大型的機器人不說,小型的機器人就需要用到TF有刷電機、無刷電機、TF減速電機。
2020-06-25 18:40:001158 力矩電機在不平衡狀態下運行,調節性能較差,但由于設備簡單,這種調節形式應用較多,常用的單相調壓方法有以下兩種:
2020-08-09 04:36:004066 電機是生活中常用電子設備之一,針對用途不同,電機可以做諸多劃分。本文中,小編將為大家介紹伺服電機的特點和原理,并對力矩電機的特點和原理予以介紹。最后,小編將對伺服電機和力矩電機二者之間的區別予以探討。如果你對電機抑或伺服電機、力矩電機具有興趣,不妨繼續往下閱讀哦。
2020-11-22 09:41:574150 雖然昆山同茂電子有限的主營產品是直驅電機,包括直線電機、音圈電機、直線電機模組和音圈電機模組,但力矩電機也是有售的,且具備力矩電機研發定制能力。
2021-03-26 14:10:37631 作為行業領先的協作機器人關節模組供應商, RJSIIZ系列機器人關節模組是泰科智能專為3-20Kg以下協作機器人而設計,高度集成了包括無框力矩電機、低壓直流驅動器、諧波減速機、制動器和雙反饋裝置。尺寸小,符合協作機器人緊湊、靈活的設計特點。
2021-04-15 10:58:042293 機器人關節是機器人各個零部件之間發生相對運動的機構。關節之中,單獨驅動的為主動關節,反之稱為從動關節。機器人關節模組通常采用超聲波電機、伺服電機、諧波減速器、VR減速器、行星齒輪箱電機等。
2021-05-28 09:11:441 機器人關節是機器人各個零部件之間發生相對運動的機構。關節之中,單獨驅動的為主動關節,反之稱為從動關節。機器人關節模組通常采用超聲波電機、伺服電機、諧波減速器、VR減速器、行星齒輪箱電機等。 機器人
2021-06-13 10:00:009764 力矩電動機,又分為交流力矩電動機和直流力矩電動機,在電路結構上與一般的交、直流電動機相類似,但在性能上有所不同。本文以交流力矩電機控制器的原理和檢修內容為重點。交流力矩電動機轉子的電阻比變通交流電
2021-07-16 14:33:5710808 力矩電機控制器是一種電流限制元件,在電路中連接電阻時,可以限制其支路的電流大小。小型化的力矩馬達控制器通常裝在塑殼碳布中,而大的力矩馬達控制器則裝在電阻率大的磁芯中。扭矩電機控制器的歐姆電阻接近于
2021-07-19 18:26:333273 力矩電機是一種特殊的電機,其特點如下:
高扭矩:力矩電動機的轉矩特性非常平坦,在額定轉速范圍內具有很高的扭矩輸出,可以滿足大負載、低速運轉的應用需求。
2023-03-10 13:53:111713 力矩電機的型號通常會包含以下幾個方面的信息:
機座號:通常用字母表示,表示電機的外形尺寸和安裝尺寸等信息。
功率:通常用數字表示,表示電機的額定輸出功率。
額定電壓
2023-03-10 14:26:445888 力矩電機的工作原理與其他電機類型相似,都是基于電磁感應原理來實現的。它是一種交流電機,通常由定子、轉子、電刷、電樞等部分組成。
當電流通過定子線圈時,會產生旋轉磁場。轉子中的導體受到
2023-03-10 14:29:124743 控制力矩電機的轉速和力矩通常需要使用一些控制方法,下面介紹幾種常見的控制方法:
變頻控制:使用變頻器對電機進行控制,通過調整變頻器的輸出頻率來改變電機的轉速和力矩。變頻控制可以實現精準的轉速和力矩控制,并且具有節能、穩定性好等優點。
2023-03-10 14:31:034614 力矩電機傳遞函數是描述電機輸入與輸出之間關系的數學模型,通常用于電機系統的控制和仿真等應用。下面介紹一種常見的力矩電機傳遞函數測定方法:
測量電機的速度常數(Kv)和扭矩常數(Kt
2023-03-10 14:35:511447 由永磁體、定子、轉子和電子控制系統等部分組成。其中,永磁體是力矩電機的關鍵部件,它產生了一個恒定的磁場,使得電機輸出的轉矩與電流呈線性關系。與傳統電動機相比,力矩電機可以在較寬的轉速范圍內提供高效的轉矩輸出,從而使得其在工業自動化、機器人、醫療設備等領域中得到了廣泛應用。
2023-03-10 14:38:563138 力矩電機控制器的常見故障有以下幾種:
電源故障:電源線路連接不良或電源波動等問題可能導致控制器無法正常工作。
電機線圈故障:電機線圈可能存在接觸不良、斷路或短路等問題,導致電機不能正常工作。
2023-03-10 14:47:223119 力矩電機和異步電機之間有幾個重要區別:
工作原理不同:力矩電機是基于磁滯現象的工作原理,而異步電機是基于電磁感應的工作原理。力矩電機的轉子和定子之間存在磁性阻尼,因此當負載增加時,它可以保持較穩定的轉速和輸出力矩,而異步電機在負載變化時可能出現速度和力矩波動。
2023-03-10 14:51:381034 力矩電機具有低轉速、大扭矩、過載能力強、響應快、特性線性度好、力矩波動小等特點,可直接驅動負載省去減速傳動齒輪,從而提高了系統的運行精度。
2023-03-10 15:36:33398 力矩電機在接線之前,還應檢查步進力矩電機的絕緣,最好在接線之前完成對力矩電機的單體調試檢查,當力矩電機符合現行規范要求時,再接外部線。一般低壓力矩電機的絕緣電阻要求大于0.5MΩ,搖表使用500V。
2023-03-10 16:59:566227 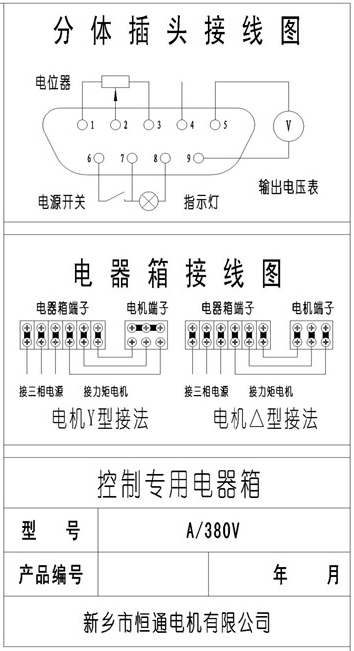
直驅力矩電機精度更高,一般會使用高精度的編碼器,由于編碼器和轉子(負載)直接耦合,因此電機的精度直接與編碼器的精度關聯。
2023-05-11 15:53:341103 
直接驅動直流力矩電機體積小巧,特別適用于那些要求用最小的體積、重量、動力、響應時間輸出最大效率和最好定位精度的伺服應用。
2023-06-12 09:44:29761 力矩電機和減速電機都是應用廣泛的傳動設備,在結構、原理、規格、性能特點、用途、技術參數都不一樣,下面和大家一起了解一下這兩種設備。 什么是力矩電機? ? ? ? 力矩電機是一種具有軟機械特性和寬調速
2023-06-12 09:46:521422 其實,力矩電機的使用范圍非常有限。1.要如何做到力矩電機控制器與機械配比在力矩電機的最佳使用范圍以內,使收卷效果、線性張力、扭矩都能達到最佳匹配狀態;2.一般情況下同一設備上,不論大線小線都是由人
2022-01-27 10:47:58678 
力矩電機控制器是一種電流限制元件,在電路中連接電阻時,可以限制其支路的電流大小。小型化的力矩馬達控制器通常裝在塑殼碳布中,而大的力矩馬達控制器則裝在電阻率大的磁芯中。扭矩電機控制器的歐姆電阻接近于
2022-01-13 15:23:081194 
由于采用不同的設計參數,力矩電機的機械特性和用途分為兩類:卷繞特性和恒轉矩特性的力矩電動機。1)卷繞特性力矩電動機實現恒張力傳動,適用于生產過程中需要使產品維持恒定的張力和用恒定的線速度把產品卷繞
2022-02-28 14:58:57591 
因為力矩電機在電線電纜行業的應用是非常普遍的,所以力矩電機的相關衍生品,比如,力矩電機控制器就隨之也廣泛起來今天就來說說力矩電機控制器在使用時的一些誤區。一般從堵轉電流6A~200A之間,常規
2022-06-08 18:13:17712 
因力矩電機控制器在線纜、化工、輕工、紡織等行業中使用頗為廣泛,今天就力矩電機控制器的發展和應用來聊聊。早期七十年代的收卷力矩電機控制器采用的是三相自耦式調壓器,不僅是笨重、能耗大,而且容易
2022-06-15 16:10:54499 
力矩電機控制器簡單故障判別方法:1.力矩電機控制器通電時,電機抖動a)檢查是否為控制信號線接頭松動b)檢查是否為三相電源缺相。2.力矩電機控制器通電后,電機立即高速運行a)檢查是否為控制信號已加在
2022-07-27 16:10:302425 
作為行業領先的協作機器人關節模組供應商, RJSIIZ系列機器人關節模組是泰科智能專為3-20Kg以下協作機器人而設計,高度集成了包括無框力矩電機、低壓直流驅動器、諧波減速機、制動器和雙反饋裝置。尺寸小,符合協作機器人緊湊、靈活的設計特點。
2023-04-20 15:02:39490 
、力矩電機等。 伺服電機在控制精度、過載能力、速度響應等性能方面表現優異,廣泛應用于工業自動化、機器人等領域,而步進電機則具備性價比優勢。 二. 人形機器人電機用量 人形機器人新增更多電機需求,伺服電機和步進電機均具備適配
2023-06-25 15:18:24785 
力矩電機和減速電機都是應用廣泛的傳動設備,在結構、原理、規格、性能特點、用途、技術參數都不一樣,下面和大家一起了解一下這兩種設備。
2023-07-17 16:27:08442 電機機器人的關節伺服電機控制是一種先進的技術,依靠電機驅動器、控制算法來完成精確的電流和速度控制,來調整電機的運動,以確保所需的位置、速度和力矩。隨著控制技術和半導
2023-09-22 08:17:421209 
電機也就是我們常說的馬達,在很多設備中都有電機的身影。本文將對異步電機、力矩電機以及力矩電機和異步電機的區別予以介紹。一、異步電機異步電動機又稱感應電動機,是由氣隙旋轉磁場與轉子繞組感應電流相互作用
2023-10-19 08:07:46773 
Tecnotion無框力矩電機根據外徑及扭矩大小現有QTR-A-65,78,105,133,160和QTL-A-210,230,290,310,385,485系列Tecnotion力矩電機是一種永磁
2022-05-13 11:30:5530 力矩電機是一種電動機,其工作原理是通過電源供電,產生磁場,然后利用磁場與電流之間的相互作用產生力矩,驅動轉子進行運動。 力矩電機是一種常用的電動機,廣泛應用于各個領域,如工業、交通、家電等。力矩電機
2023-12-20 09:38:23717
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論