踩坑 手眼標(biāo)定的算法網(wǎng)上是比較多的,但是很多都不好用。github上高贊的easy_handeye,試了一下,但是mycobot600沒有提供moveit的配置,而我ROS基礎(chǔ)不是很好,不太會(huì)修改
2022-06-24 15:49:57 6576
6576 
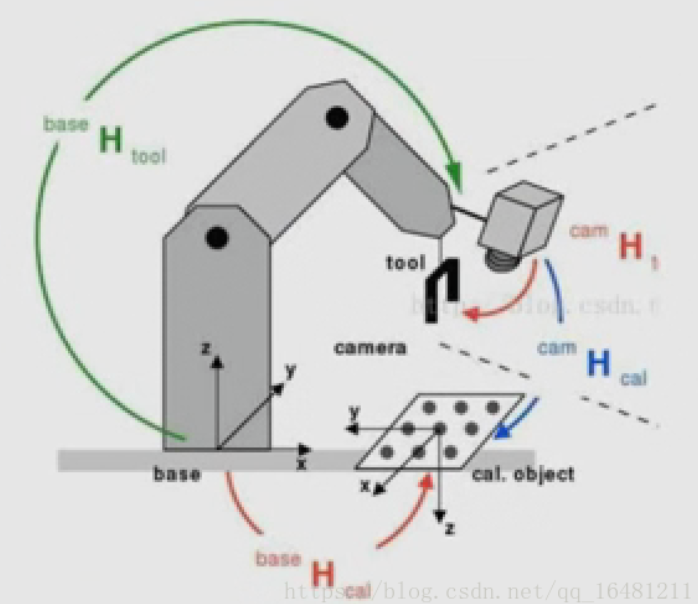
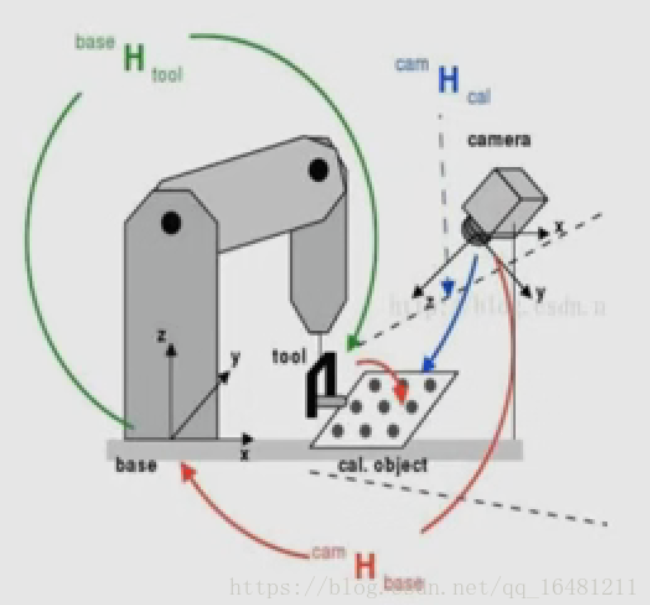
手眼標(biāo)定分為兩種類型:一種是眼在手上的手眼標(biāo)定(Eye?in?Hand);一種是眼在手外的手眼標(biāo)定(Eye?to?Hand)[8]。
2022-09-13 14:41:591276 現(xiàn)在的機(jī)器人少不了有各種傳感器,傳感器之間的標(biāo)定是機(jī)器人感知環(huán)境的一個(gè)重要前提。所謂標(biāo)定,是指確定傳感器之間的坐標(biāo)轉(zhuǎn)換關(guān)系。由于標(biāo)定的傳感器各異,好像沒有特別通用的方法。
2022-11-25 09:34:463679 本帖最后由 lilin0734 于 2017-11-15 20:09 編輯
機(jī)器視覺手眼標(biāo)定
2017-11-06 10:45:41
機(jī)器人技術(shù)和機(jī)器學(xué)習(xí)正成為嵌入式系統(tǒng)硬件和軟件供應(yīng)商的下一個(gè)重大事件。嵌入式系統(tǒng)可以通過網(wǎng)絡(luò)連接和物聯(lián)網(wǎng)(IoT)來傳遞信息、共享資源。無論是智能,低能耗,邊緣設(shè)備,中間網(wǎng)關(guān)還是計(jì)算節(jié)點(diǎn),都需要
2021-12-20 06:03:10
機(jī)器人技術(shù)不再是未來的幻想,它已經(jīng)進(jìn)入了我們的日常生活。但在這一領(lǐng)域,我們?nèi)狈ο鄳?yīng)的法律法規(guī)。比如無人機(jī),現(xiàn)在由美國(guó)聯(lián)邦航空管理局( FAA)來管理,但很多人認(rèn)為,這完全越權(quán)了;比如機(jī)器人手
2015-01-13 16:39:57
防護(hù)裝備,并且沒有加入任何安全功能。2016年后還有ISO/TS 15066可供使用。該技術(shù)規(guī)范參考ISO 10218-1和ISO 10218-2,給出了對(duì)“機(jī)器人系統(tǒng)和人員共享同一工作空間”的“協(xié)作
2018-10-30 11:33:11
機(jī)器人),而這種多樣性則展示了機(jī)器人技術(shù)對(duì)我們生活的滲透力,其影響之深遠(yuǎn)將不亞于之前計(jì)算機(jī)和互聯(lián)網(wǎng)。機(jī)器人之所以能夠展示出如此巨大的潛力與魅力,是因?yàn)樗烊坏陌霗C(jī)械半數(shù)字屬性,并且隨著技術(shù)的進(jìn)步,最終
2015-12-29 14:56:59
PID控制的優(yōu)點(diǎn)有哪些?機(jī)器人控制技術(shù)有哪些重要性?
2021-06-18 08:02:56
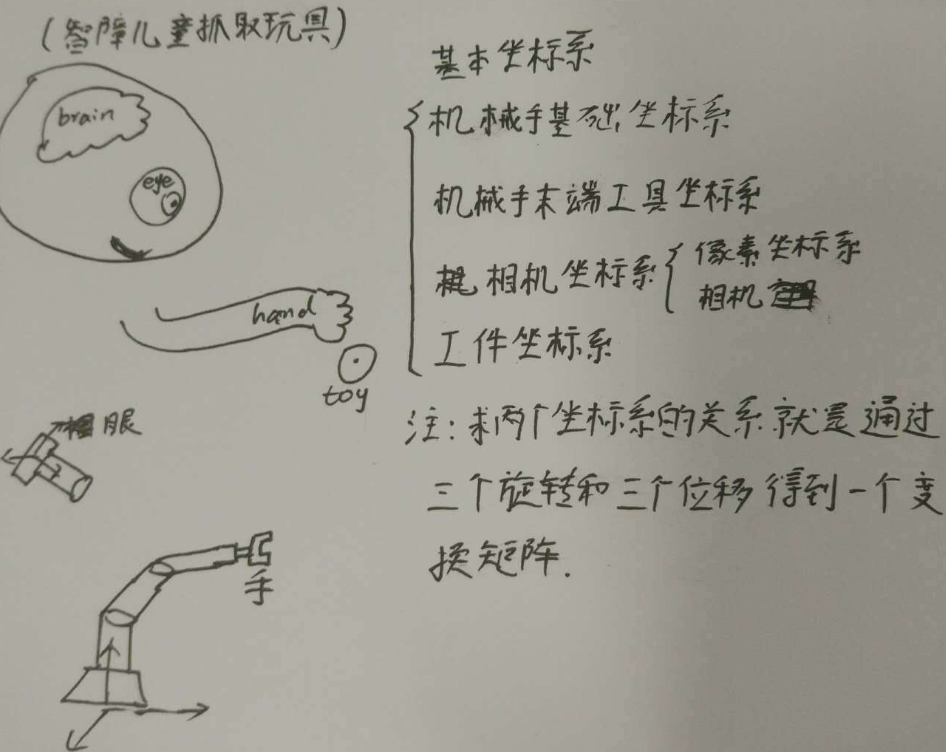
機(jī)器人是什么?你可能會(huì)對(duì)這個(gè)問題本身感到困惑。.有意思。.但是在實(shí)際的機(jī)器人技術(shù)中,這是一個(gè)廣闊的領(lǐng)域。機(jī)器人學(xué)這個(gè)術(shù)語指的是機(jī)器人。什么是機(jī)器人?我們可以粗略地說,ROBOT 是一個(gè)擁有大腦和記憶
2022-03-31 10:31:31
機(jī)器人普及亟待解決的10大挑戰(zhàn),你都知道哪些?如何去應(yīng)對(duì)這些挑戰(zhàn)?
2021-06-17 07:37:42
`機(jī)器人的主要技術(shù)參數(shù) 機(jī)器人的技術(shù)參數(shù)反映了機(jī)器人可勝任的工作、具有的最高操作性能等情況,是設(shè)計(jì)、應(yīng)用機(jī)器人必須考慮的問題。機(jī)器人的主要技術(shù)參數(shù)有自由度、分辨率、工作空間、工作速度、工作載荷等
2017-08-15 14:00:52
機(jī)器人的定義是什么?機(jī)器人優(yōu)點(diǎn)和缺點(diǎn)是什么?機(jī)器人是由哪些部分組成的?工業(yè)機(jī)器人的應(yīng)用有哪些?
2021-07-05 06:48:21
安靜高效的機(jī)器人正在接管——阻止它們已經(jīng)太遲了。不,這不是機(jī)器人世界末日另一個(gè)可怕的故事。這是關(guān)于您下一設(shè)計(jì)硬件預(yù)算和規(guī)劃面臨威脅的問題。雖然您無法阻礙技術(shù)變革,但是您可以預(yù)測(cè)其影響。
2019-07-17 08:08:16
`據(jù)傳奧地利發(fā)生了一起機(jī)器人自殺事件,自殺的機(jī)器人叫Roomba 760。據(jù)說這位機(jī)器人自殺的原因是忍受不了繁重又無限重復(fù)的清潔工作,而選擇了***。***之后是這個(gè)樣子滴是不是渣都木有了`
2016-01-05 11:07:53
,黑龍江省哈爾濱市機(jī)器人餐廳,機(jī)器人為客人傳送菜肴。 2013年1月12日,黑龍江省哈爾濱市機(jī)器人餐廳,餐廳的工作人員將菜肴放在傳送的機(jī)器人手中的餐盤內(nèi)。 2013年1月12日,黑龍江省哈爾濱市機(jī)器人餐廳,烹飪的機(jī)器人為客人煮水餃。 2013年1月12日,黑龍江省哈爾濱市機(jī)器人餐廳
2014-07-26 09:11:04
Halcon旋轉(zhuǎn)標(biāo)定固定相機(jī),從下往上拍照,計(jì)算產(chǎn)品到標(biāo)準(zhǔn)位置的偏差,如果產(chǎn)品有角度偏差,那就要額外減去旋轉(zhuǎn)產(chǎn)生的X、Y偏移,都說取點(diǎn)擬合圓,圓心就是旋轉(zhuǎn)中心點(diǎn),可是我擬合出來的圓心轉(zhuǎn)換成機(jī)器人
2021-11-09 15:36:24
`大數(shù)據(jù),智能化是現(xiàn)在最主要的趨勢(shì),而最能體現(xiàn)智能的,首選機(jī)器人。機(jī)器人的歷史并不算長(zhǎng),從1959年英格伯格和德沃爾制造出世界上的第一代工業(yè)機(jī)器人至今也只有57年,可是技術(shù)日新月異,當(dāng)然也出現(xiàn)不少
2016-03-10 14:23:46
NI VISION 與機(jī)器人做引導(dǎo)怎么樣實(shí)現(xiàn)手眼標(biāo)定好像沒有像其他視覺類似的函數(shù)...哪位大俠可以指點(diǎn)一二謝謝了
2018-04-09 15:35:20
ZNL-IR03工業(yè)機(jī)器人綜合實(shí)訓(xùn)平臺(tái)是什么?ZNL-IR03工業(yè)機(jī)器人綜合實(shí)訓(xùn)平臺(tái)有哪些特點(diǎn)?ZNL-IR03工業(yè)機(jī)器人綜合實(shí)訓(xùn)平臺(tái)有哪些技術(shù)參數(shù)?
2021-08-16 07:16:23
機(jī)器人在之前的機(jī)器人的基礎(chǔ)上,加入了可以自由便捷的運(yùn)動(dòng)功能,兩個(gè)攝像頭精準(zhǔn)拍攝、全方位的視覺功能,還有一個(gè)超聲傳感器功能。傳感器可以識(shí)別人類和NAO機(jī)器人的接觸,從而做些動(dòng)作和人類互動(dòng),所以說NAO機(jī)器人機(jī)器人真的可以讓我們體驗(yàn)到智能的時(shí)代。
2015-02-13 15:43:24
以前師兄師姐們做過的機(jī)器人,現(xiàn)在我來分享一下!!!!!
2013-08-06 09:28:22
Tran***ot ROS教育機(jī)器人如果你熱衷于編程探索和DIY創(chuàng)作,恰好又在尋找一款可以讓你自由發(fā)揮,二次開發(fā)的ROS平臺(tái),那么我們今天體驗(yàn)的這款Tranbot ROS教育機(jī)器人將會(huì)非常適合你。對(duì)于這款機(jī)器人的裝箱清單,8個(gè)字形容:物資豐富,品質(zhì)過硬。
2021-11-25 20:33:50
技術(shù)相結(jié)合,以獲得更可靠的位置估計(jì)。 在絕對(duì)定位中,全球定位系統(tǒng)、路標(biāo)定位和地圖匹配定位是目前比較成熟的技術(shù),全球定位系統(tǒng)就是大家所熟知的GPS,主要用于解決機(jī)器人定位時(shí)存在近距離定位精度低等問題,它
2018-10-11 17:49:40
` 山東昊威機(jī)器人有限公司的書法機(jī)器人在展會(huì)上可謂是吸睛神器,小伙伴們紛紛前來圍觀,這不,國(guó)際友人都不禁為我們昊威書法機(jī)器人手動(dòng)點(diǎn)贊啦!!!厲害啦我的機(jī)器人。`
2017-08-11 11:48:54
,運(yùn)動(dòng)學(xué)部分從坐標(biāo)變換人手,介紹了正向運(yùn)動(dòng)學(xué)方程的建立、逆向運(yùn)動(dòng)學(xué)的求解以及機(jī)器人的微分運(yùn)動(dòng)等內(nèi)容。控制結(jié)構(gòu)篇著重介紹機(jī)器人的傳感技術(shù)、位置控制和力控制。針對(duì)機(jī)器人控制領(lǐng)域的研究動(dòng)態(tài)和主要研究方向,先進(jìn)控制篇介紹了傳感信息融合、視覺控制、協(xié)調(diào)控制、移動(dòng)機(jī)器人技術(shù)、智能控制方法等。
2017-09-19 15:30:57
說到機(jī)器人自主定位導(dǎo)航解決方案及技術(shù),大家腦海里肯定會(huì)浮現(xiàn)“定位”、“建圖”、“避障”、“路徑規(guī)劃”等字眼。定位 在思嵐提供的自主定位導(dǎo)航解決方案中,主要是通過雷達(dá)和里程計(jì)的數(shù)據(jù)來進(jìn)行定位。雖然
2018-03-28 15:48:15
`華南機(jī)器人應(yīng)用培訓(xùn)中心擁有各種設(shè)備,開展各種不同的機(jī)器人培訓(xùn)班。打造各種工業(yè)現(xiàn)場(chǎng)常見的機(jī)器人工作站,現(xiàn)開展KUKA、發(fā)那科、三菱、ABB、愛普生工業(yè)機(jī)器人培訓(xùn)對(duì)外招生。 一、認(rèn)識(shí)機(jī)器人技術(shù):工業(yè)
2015-09-02 14:03:18
——工業(yè)機(jī)器人的智能化程度要求也越來越高,采用深度學(xué)習(xí)技術(shù)為工業(yè)機(jī)器人賦能是目前各大廠商的統(tǒng)一認(rèn)知。本文結(jié)合實(shí)際案例,簡(jiǎn)要說明一下智能機(jī)器人的實(shí)現(xiàn)流程。一、智能機(jī)器人概念 人工智能技術(shù),其主要作用就是用
2018-05-31 09:36:03
求指教如何使用labview實(shí)現(xiàn)手眼標(biāo)定謝謝
2019-04-22 18:24:28
手術(shù)機(jī)器人系統(tǒng)的工作原理是什么?如何去實(shí)現(xiàn)一種基于傳感器的機(jī)器人手術(shù)系統(tǒng)設(shè)計(jì)?
2021-09-28 08:46:20
席文姣,陳帝伊,馬孝義(西北農(nóng)林科技大學(xué) 水利與建筑工程學(xué)院,陜西 西安712100)0引言如何設(shè)計(jì)智能滅火機(jī)器人控制器?控制器是智能機(jī)器人處理和控制信息的主體,它直接決定了機(jī)器人的行為和性能
2019-07-31 06:23:18
`昨天和一些同行了解。加上自己的搜索。找到了特斯拉機(jī)器人免費(fèi)開辦的 工業(yè)機(jī)器人技術(shù)在線培訓(xùn)課程,認(rèn)真的花了差不多半個(gè)晚上的時(shí)間,確實(shí)不錯(cuò)。比較全面。有所重點(diǎn)講述,相信對(duì)許許多多想學(xué)機(jī)器人技術(shù)。想玩機(jī)器人,想進(jìn)去機(jī)器人行業(yè)的人來說都是福音。 有興趣的小伙伴都去看看吧。百度傳課界面搜索特斯拉機(jī)器人即可。`
2015-01-23 11:02:11
碰撞或事故?每個(gè)機(jī)器人類型的挑戰(zhàn)可能完全不同。工業(yè)機(jī)器人設(shè)計(jì)旨在快速、準(zhǔn)確地執(zhí)行任務(wù)。機(jī)器人手臂內(nèi)的電機(jī)接收信號(hào)并執(zhí)行。通常,機(jī)器人手臂不具備用于感測(cè)其環(huán)境的特征。它只是執(zhí)行命令并移動(dòng)到編程位置,不管
2019-03-06 06:45:09
隨著中國(guó)制造業(yè)轉(zhuǎn)型步伐的加快,機(jī)器人的使用越來越頻繁,作為工廠里的技術(shù)工程師必需了解機(jī)器人的相關(guān)技術(shù),那么通用機(jī)器人由什么部件組成呢?
2020-05-13 07:45:10
`<span style="" >工業(yè)機(jī)器人的技術(shù)原理機(jī)器人是綜合了計(jì)算機(jī)、控制論、機(jī)構(gòu)學(xué)、信息和傳感技術(shù)、人工智能、仿生學(xué)等多學(xué)科而
2018-11-23 10:40:38
機(jī)器人技術(shù)是綜合了計(jì)算機(jī)、控制論、機(jī)構(gòu)學(xué)、信息和傳感技術(shù)、人工智能、仿生學(xué)等多學(xué)科而形成的高新技術(shù),是當(dāng)代研究十分活躍,應(yīng)用日益廣泛的領(lǐng)域。機(jī)器人應(yīng)用情況,是一個(gè)國(guó)家工業(yè)自動(dòng)化水平的重要標(biāo)志。
2020-03-27 09:03:30
工業(yè)機(jī)器人一般由主構(gòu)架(手臂)、手腕、驅(qū)動(dòng)系統(tǒng)、測(cè)量系統(tǒng)、控制器及傳感器等組成。 1圖是工業(yè)機(jī)器人的典型結(jié)構(gòu)。機(jī)器人手臂具有3個(gè)自由度(運(yùn)動(dòng)坐標(biāo)軸),機(jī)器人作業(yè)空間由手臂運(yùn)動(dòng)范圍決定。手腕是機(jī)器人
2015-01-19 10:36:12
超聲波電機(jī)一般安裝在機(jī)器人手指關(guān)節(jié)處,機(jī)器人的關(guān)節(jié)驅(qū)動(dòng)離不開伺服系統(tǒng),機(jī)器人關(guān)節(jié)越多,對(duì)柔性及精準(zhǔn)度就越高,所需的超聲電機(jī)數(shù)量就越多。機(jī)器人對(duì)關(guān)節(jié)驅(qū)動(dòng)電機(jī)的要求非常嚴(yán)格,因?yàn)槌暡姍C(jī)具有以下優(yōu)勢(shì)
2020-11-24 11:30:02
教育機(jī)器人搬運(yùn)碼垛套件采用Openduino龍人寶貝機(jī)械手完成不同色塊的搬運(yùn)碼垛任務(wù)。Openduino龍人寶貝機(jī)械人手由兩輪差動(dòng)移動(dòng)平臺(tái)和四自由度機(jī)械手的組成,能夠方便地外擴(kuò)各種傳感器,完成各種搬運(yùn)碼垛作業(yè)任務(wù)。機(jī)器人采用框架結(jié)構(gòu),拆裝方便。
2016-03-29 10:22:15
工業(yè)機(jī)器人、教育機(jī)器人、包裝機(jī)器人、家用機(jī)器人等市場(chǎng)日逐繁榮。隨著消費(fèi)者生活方式的改變以及智能化、自動(dòng)化等技術(shù)的愈發(fā)成熟,機(jī)器人市場(chǎng)正遍地開花,發(fā)展勢(shì)頭迅猛。人工智能的方興未艾,讓“教育機(jī)器人”逐漸
2018-12-20 10:01:58
`說起機(jī)器人,你可能會(huì)聯(lián)想起很多跟機(jī)器人有關(guān)的電影,而今,擁有超能力的機(jī)器人,開始走進(jìn)人們的視野,比如他們能代替人類從事各類工作,會(huì)照顧老人、小孩,會(huì)跳舞、會(huì)聊天、會(huì)幫人們端茶送水、會(huì)
2015-12-09 09:16:31
在機(jī)器人的設(shè)計(jì)中,機(jī)器人的靈巧程度很重要。而人最靈巧的莫過于手指,而手指的靈巧性取決于手指的機(jī)械結(jié)構(gòu)和電機(jī)驅(qū)動(dòng)設(shè)計(jì)。這里簡(jiǎn)要的介紹了機(jī)器人手指的電氣系統(tǒng),詳細(xì)的描述了機(jī)器人手指關(guān)節(jié)的電機(jī)驅(qū)動(dòng)設(shè)計(jì)。
2016-01-14 10:34:55
關(guān)于ros智能機(jī)器人,就是一個(gè)寫智能機(jī)器人代碼的一個(gè)虛擬機(jī),
2021-10-13 19:20:16
一種新型的工業(yè)機(jī)器人已經(jīng)走到行業(yè)的前沿, 他們的主要特點(diǎn)是能夠安全地協(xié)助人類工作。在網(wǎng)上有很多人談?wù)撍鼈儯?b class="flag-6" style="color: red">你認(rèn)真了解過它嗎?在2008年,很多人愛它們只是處于好奇心。在2012年,機(jī)器人被視為
2020-08-17 06:00:49
機(jī)器人視覺傳感器詳解一種新型的工業(yè)機(jī)器人已經(jīng)走到行業(yè)的前沿, 他們的主要特點(diǎn)是能夠安全地協(xié)助人類工作。在網(wǎng)上有很多人談?wù)撍鼈儯?b class="flag-6" style="color: red">你認(rèn)真了解過它嗎?
2020-08-14 07:24:17
有什么機(jī)器人技術(shù)的資料?單片機(jī)開發(fā)的.
2011-06-21 10:42:25
希望各位大神能賜我?guī)讖埢趌abview手眼標(biāo)定的實(shí)現(xiàn)圖,給我?guī)讖?b class="flag-6" style="color: red">手眼標(biāo)定結(jié)果也非常感謝,謝謝!!!
2019-04-27 19:33:37
目的:模仿人手動(dòng)作測(cè)試手機(jī)屏幕,比如點(diǎn)擊、滑動(dòng)有沒有朋友熟悉能完成此功能的成品機(jī)器人,不想自己動(dòng)手搭建三軸滑臺(tái)。。。
2016-10-08 14:24:39
摘要:機(jī)器人技術(shù)是綜合了計(jì)算機(jī)、控制論、機(jī)構(gòu)學(xué)、信息傳感技術(shù)、人工智能、仿生學(xué)等多學(xué)科而形成的高新技術(shù),是當(dāng)代研究十分活躍,應(yīng)用日益廣泛的領(lǐng)域,也是一個(gè)國(guó)家工業(yè)自動(dòng)化水平的重要標(biāo)志。機(jī)器人技術(shù)有著
2016-09-22 16:39:46
這個(gè)機(jī)器人比較高大,但也是由金屬拼裝件套件拼裝而成。控制板是蘋果板,機(jī)器人的底部安裝有巡線傳感器,可以自動(dòng)循黑線前進(jìn),這樣只需從你的房間或者辦公位置布置一條黑線到飲水機(jī),機(jī)器人就可以沿黑線自動(dòng)
2016-03-25 14:28:28
請(qǐng)問各位大神,誰知道如何用labvIEW實(shí)現(xiàn)手眼標(biāo)定?
2018-06-12 11:03:34
有個(gè)項(xiàng)目要用視覺定位,視覺拍好產(chǎn)品之后,把產(chǎn)品的坐標(biāo)發(fā)送到PLC,PLC再執(zhí)行定位指令。現(xiàn)在查到的資料都沒有涉及這一塊,都是講相機(jī)標(biāo)定,而不是手眼標(biāo)定。哪位有這方面的資料,怎么用labview實(shí)現(xiàn)手眼標(biāo)定?
2020-05-28 14:42:35
隨著人工智能技術(shù)的發(fā)展,機(jī)器人已經(jīng)開始接管人類的部分工作,例如快遞、工廠作業(yè)、餐廳服務(wù)員甚至媒體編輯---紐約時(shí)報(bào)就聘請(qǐng)了一位機(jī)器人做總編。未來,機(jī)器人可以介入半導(dǎo)體設(shè)計(jì)開發(fā)嗎?例如,機(jī)器人可以進(jìn)行FPGA開發(fā)嗎?
2019-10-10 06:33:18
`機(jī)器人手指一直以來都是國(guó)際公認(rèn)的高難度科技項(xiàng)目,隨著科技水平的不斷進(jìn)步和新興的交叉學(xué)科不斷涌現(xiàn),傳統(tǒng)的電磁電機(jī)機(jī)器人手指由于靈活性差、感知能力低下、力的控制精度不高等,已無法滿足應(yīng)用的迫切需要
2020-09-28 14:08:22
這些馬達(dá)驅(qū)動(dòng)的知識(shí)你都懂嗎?
2015-04-13 19:39:21
視頻展示一個(gè)3D打印的機(jī)器人手用安森美半導(dǎo)體電機(jī)驅(qū)動(dòng)器方案套件的LV8548MC控制。它可以做人類的手勢(shì),例如拿起球或指向某處。
2018-08-27 14:08:36
機(jī)器人視覺伺服系統(tǒng)是機(jī)器人領(lǐng)域一項(xiàng)重要的研究方向,它的研究對(duì)于開發(fā)手眼協(xié)調(diào)的機(jī)器人在工業(yè)生產(chǎn)、航空航天等方面的應(yīng)用有著重要的意義。本文針對(duì)機(jī)器人視覺伺服系統(tǒng)的
2009-05-30 11:34:01 27
27 摘要:在機(jī)器人手眼系統(tǒng)位置控制中,用CMAC神經(jīng)網(wǎng)絡(luò)建立了機(jī)器人非線性視覺映射關(guān)系模型,實(shí)現(xiàn)了圖像坐標(biāo)到機(jī)器人坐標(biāo)的變換。該模型采用了一種新的多維CMAC
2006-03-24 12:46:401104 
高級(jí)機(jī)器人手冊(cè)初學(xué)者必備高級(jí)機(jī)器人手冊(cè)高級(jí)機(jī)器人手冊(cè)
2015-12-10 16:42:4528 LS系列機(jī)器人手冊(cè) 對(duì)于機(jī)械手可以熟練掌握
2016-04-29 14:43:591 有時(shí)機(jī)器人手需要非常強(qiáng)壯,能夠非常緊緊地抓住物體,而有的機(jī)器人手需要非常精細(xì),以防止它們對(duì)人類造成傷害或損壞他們可能持有的脆弱物品。
2016-12-13 09:26:12525 一、哪些情況需要標(biāo)定零點(diǎn) 零點(diǎn)是機(jī)器人坐標(biāo)系的基準(zhǔn),沒有零點(diǎn),機(jī)器人就沒有辦法判斷自身的位置。 機(jī)器人在如下情況下要重新標(biāo)定零點(diǎn): 1.進(jìn)行更換電機(jī)、機(jī)械系統(tǒng)零部件之后。 2.超越機(jī)械極限
2017-09-19 18:31:0815 針對(duì)機(jī)器人運(yùn)動(dòng)學(xué)正解及相機(jī)的外參數(shù)標(biāo)定存在偏差時(shí),基于非線性最優(yōu)化的手眼標(biāo)定算法無法確保目標(biāo)函數(shù)收斂到全局極小值的問題,提出基于四元數(shù)理論的凸松弛全局最優(yōu)化手眼標(biāo)定算法。考慮到機(jī)械手末端
2017-12-03 10:05:050 Gibbon機(jī)器人快速標(biāo)定系統(tǒng)適用于機(jī)器人焊接、切割、機(jī)器人雕刻等要求絕對(duì)定位精度和軌跡精度較高的應(yīng)用場(chǎng)合。
2018-07-05 09:30:002340 針對(duì)借助激光跟蹤儀標(biāo)定機(jī)器人所涉及的坐標(biāo)系統(tǒng)一問題,對(duì)基于空間幾何法擬合建立的基坐標(biāo)系與機(jī)器人理論基坐標(biāo)系的轉(zhuǎn)換關(guān)系進(jìn)行了研究,提出了一種基于對(duì)偶四元數(shù)法的機(jī)器人基坐標(biāo)系標(biāo)定方法。利用指數(shù)積公式推導(dǎo)
2018-03-07 10:43:522 ,賦予機(jī)器人環(huán)境感知和“手眼協(xié)調(diào)”等能力。短期主要通過持續(xù)的項(xiàng)目探索,進(jìn)行技術(shù)的穩(wěn)定性驗(yàn)證,尋找合適的產(chǎn)品方向。
2018-04-16 12:58:002247 一般機(jī)器人手臂有3個(gè)自由度,即手臂的伸縮、左右回轉(zhuǎn)和升降 (或俯仰)運(yùn)動(dòng)。手臂回轉(zhuǎn)和升降運(yùn)動(dòng)是通過機(jī)座的立柱實(shí)現(xiàn)的,立柱的橫向移動(dòng)即為手臂的橫移。
2018-04-18 09:48:5715960 
來自卡內(nèi)基梅隆大學(xué)與明尼蘇達(dá)大學(xué)的研究人員日前利用無創(chuàng)的腦機(jī)接口(BCI)技術(shù),成功開發(fā)出第一款由大腦控制的機(jī)器人手臂,具有連續(xù)跟蹤計(jì)算機(jī)光標(biāo)的能力。
2019-06-28 09:46:42812 機(jī)器人手臂的伸縮、橫向移動(dòng)均屬于直線運(yùn)動(dòng)。
2019-07-08 11:42:3060002 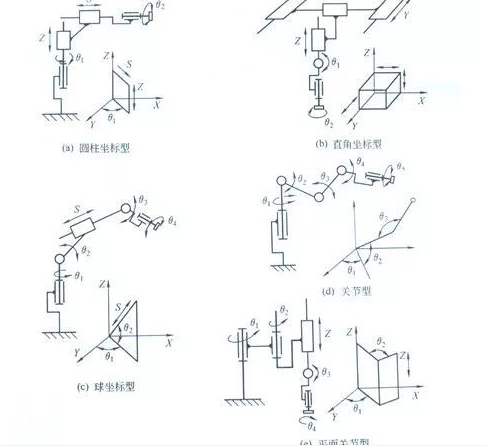
在這個(gè)項(xiàng)目中,我將向您展示如何構(gòu)建Arduino&amp; amp;使用Android手機(jī)的藍(lán)牙控制機(jī)器人手臂。該機(jī)器人手臂可以在手動(dòng)模式下操作,也可以在全自動(dòng)模式下進(jìn)行編程。
2019-07-29 09:11:047787 HALCON的手眼標(biāo)定支持不同的配置,例如多種類的機(jī)器人,傳感器,和運(yùn)作方式,傳感器是增加的。
2020-04-15 10:05:312498 能代替“臟亂、危險(xiǎn)、嚴(yán)重”的工作的機(jī)器人手臂“Float Arm”
2020-04-20 16:06:484925 這種情況的標(biāo)定過程實(shí)際上和相機(jī)和機(jī)械手分離的標(biāo)定方法是一樣的,因?yàn)橄鄼C(jī)拍照時(shí),機(jī)械手會(huì)運(yùn)動(dòng)到相機(jī)標(biāo)定的時(shí)候的位置,然后相機(jī)拍照,得到目標(biāo)的坐標(biāo),再控制機(jī)械手,所以簡(jiǎn)單的相機(jī)固定在末端的手眼系統(tǒng)很多都是采用這種方法,標(biāo)定的過程和手眼分離系統(tǒng)的標(biāo)定是可以相同對(duì)待的。
2020-07-11 09:57:505357 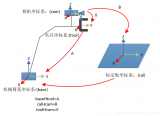
在實(shí)際控制中,相機(jī)檢測(cè)到目標(biāo)在圖像中的像素位置后,通過標(biāo)定好的坐標(biāo)轉(zhuǎn)換矩陣將相機(jī)的像素坐標(biāo)變換到機(jī)械手的空間坐標(biāo)系中,然后根據(jù)機(jī)械手坐標(biāo)系計(jì)算出各個(gè)電機(jī)該如何運(yùn)動(dòng),從而控制機(jī)械手到達(dá)指定位置。這個(gè)過程中涉及到了圖像標(biāo)定,圖像處理,運(yùn)動(dòng)學(xué)正逆解,手眼標(biāo)定等。
2020-08-28 11:42:4610856 
常見的機(jī)器人視覺伺服中要實(shí)現(xiàn)像素坐標(biāo)與實(shí)際坐標(biāo)的轉(zhuǎn)換,首先就要進(jìn)行標(biāo)定,對(duì)于實(shí)現(xiàn)視覺伺服控制,這里的標(biāo)定不僅包括攝像機(jī)標(biāo)定,也包括機(jī)器人系統(tǒng)的手眼標(biāo)定。
2020-09-10 16:40:233705 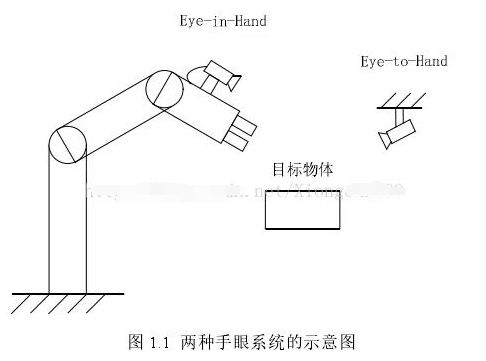
機(jī)器人手指一直以來都是國(guó)際公認(rèn)的高難度科技項(xiàng)目,隨著科技水平的不斷進(jìn)步和新興的交叉學(xué)科不斷涌現(xiàn),傳統(tǒng)的電磁電機(jī)機(jī)器人手指由于靈活性差、感知能力低下、力的控制精度不高等,已無法滿足應(yīng)用的迫切需要。超聲
2020-09-29 11:45:101583 在網(wǎng)上有許多關(guān)于制作機(jī)器人手臂的項(xiàng)目,但他們都有類似的控制方式,我感覺缺少了一些樂趣!所以我們決定制作一個(gè)可以使用聊天機(jī)器人控制的機(jī)器人手臂。如果你說“向左移動(dòng) 45 度”并且手臂會(huì)按照你的指令移動(dòng),那么它會(huì)有多酷!
2021-03-16 11:47:0030 MH6S工業(yè)機(jī)器人手冊(cè)。
2021-03-23 09:11:0410 IRB-260包裝機(jī)器人手冊(cè)免費(fèi)下載。
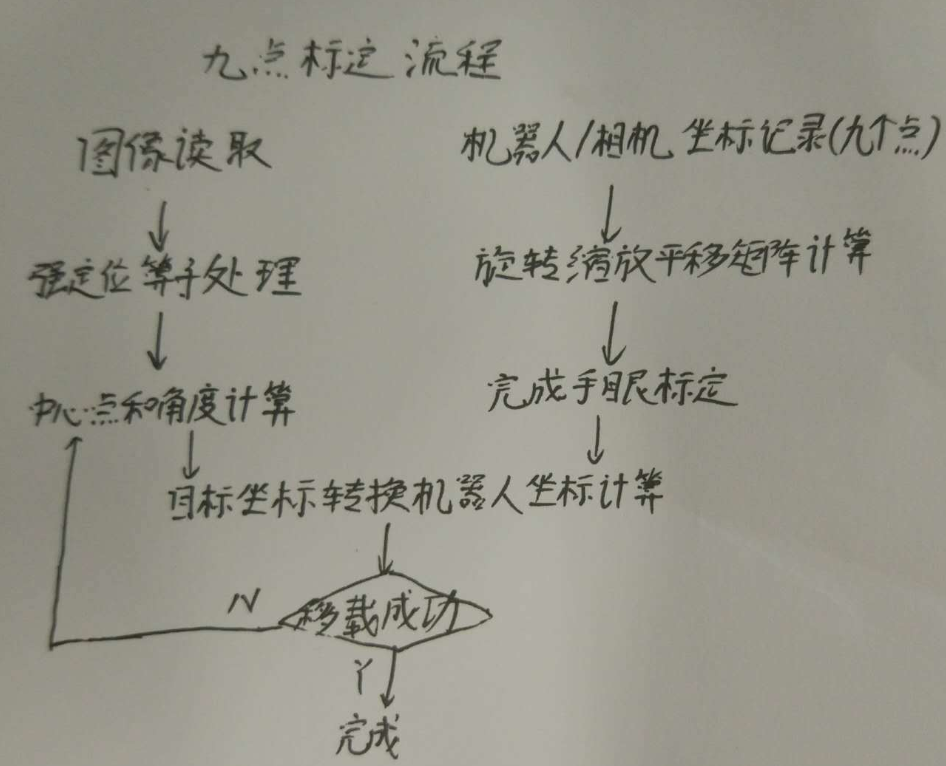
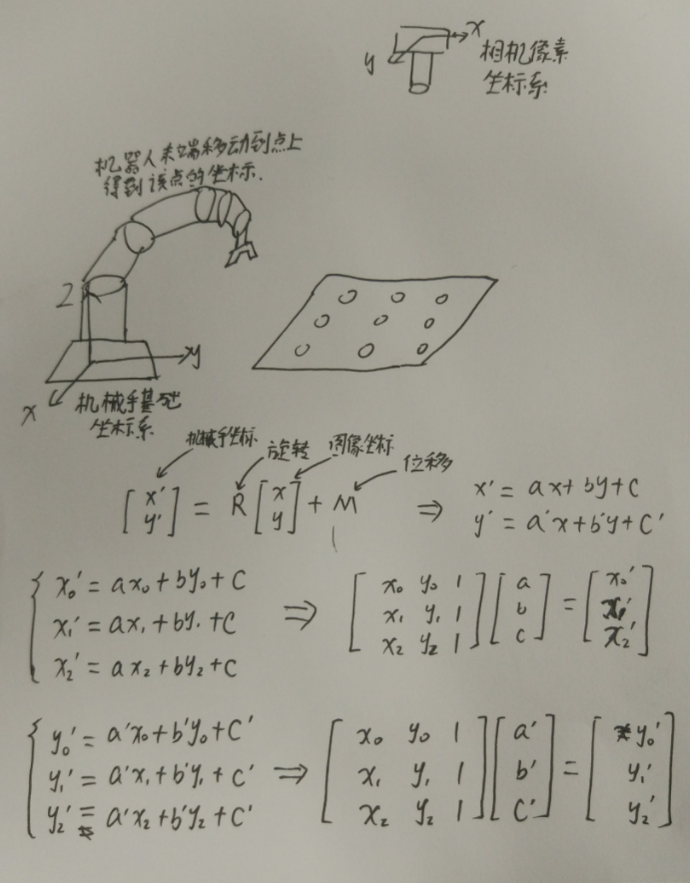
2021-05-13 11:29:0729 相機(jī)固定不動(dòng), 上往下看引導(dǎo)機(jī)器人移動(dòng) 機(jī)器人與視覺標(biāo)定理論詳解 1.相機(jī)非線性校正使用標(biāo)定板做非線性校正2.相機(jī)與機(jī)器人做9點(diǎn)標(biāo)定可以使用機(jī)器人扎9個(gè)點(diǎn),或者機(jī)器人抓住工件擺放9個(gè)位置,得到
2021-05-27 14:15:533252 
常見的機(jī)器人視覺伺服中要實(shí)現(xiàn)像素坐標(biāo)與實(shí)際坐標(biāo)的轉(zhuǎn)換,首先就要進(jìn)行標(biāo)定,對(duì)于實(shí)現(xiàn)視覺伺服控制,這里的標(biāo)定不僅包括攝像機(jī)標(biāo)定,也包括機(jī)器人系統(tǒng)的手眼標(biāo)定。 以常見的焊接機(jī)器人系統(tǒng)為例,有兩種構(gòu)型。
2023-02-06 15:24:211136 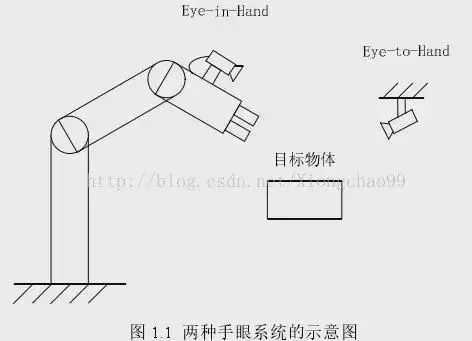
機(jī)械手搭載雙目相機(jī),手眼標(biāo)定。
2023-04-20 16:32:43859 在實(shí)際控制中,相機(jī)檢測(cè)到目標(biāo)在圖像中的像素位置后,通過標(biāo)定好的坐標(biāo)轉(zhuǎn)換矩陣將相機(jī)的像素坐標(biāo)變換到機(jī)械手的空間坐標(biāo)系中,然后根據(jù)機(jī)械手坐標(biāo)系計(jì)算出各個(gè)電機(jī)該如何運(yùn)動(dòng),從而控制機(jī)械手到達(dá)指定位置。這個(gè)過程中涉及到了圖像標(biāo)定,圖像處理,運(yùn)動(dòng)學(xué)正逆解,手眼標(biāo)定等。
2023-07-03 15:45:152288 
機(jī)械手搭載雙目相機(jī),手眼標(biāo)定。
2023-07-11 11:18:21831 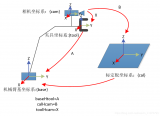
首先,我們要了解一下常規(guī)的手眼標(biāo)定流程是怎么樣的。
2023-07-25 16:52:112203 
張正友標(biāo)定方法是一種經(jīng)典的相機(jī)標(biāo)定方法,目前是最受歡迎的方法之一。該方法通過一種機(jī)器學(xué)習(xí)的方法,利用大量匹配的數(shù)據(jù)點(diǎn)像素坐標(biāo)、世界坐標(biāo),基于極大似然估計(jì)擬合得到一個(gè)最優(yōu)解。
2023-08-03 10:59:12641 
常見的機(jī)器人視覺伺服中要實(shí)現(xiàn)像素坐標(biāo)與實(shí)際坐標(biāo)的轉(zhuǎn)換,首先就要進(jìn)行標(biāo)定,對(duì)于實(shí)現(xiàn)視覺伺服控制,這里的標(biāo)定不僅包括攝像機(jī)標(biāo)定,也包括機(jī)器人系統(tǒng)的手眼標(biāo)定。
2023-08-04 11:48:47579 
機(jī)器人標(biāo)定技術(shù)是提高機(jī)器人末端絕對(duì)定位精度的重要方法。可分為三個(gè)層次:一是關(guān)節(jié)級(jí)標(biāo)定,二是機(jī)器人運(yùn)動(dòng)學(xué)標(biāo)定,三是機(jī)器人動(dòng)力學(xué)標(biāo)定。
2023-09-15 09:49:521226 
機(jī)器人技術(shù)處于工業(yè) 4.0、人工智能和邊緣革命的前沿。讓我們看看如何創(chuàng)建 FPGA 控制的機(jī)器人手臂。
2023-10-24 17:15:33459 
機(jī)器人技術(shù)處于工業(yè) 4.0、人工智能和邊緣革命的前沿。讓我們看看如何創(chuàng)建 FPGA 控制的機(jī)器人手臂。
2023-10-24 17:26:20935 
在機(jī)器人零點(diǎn)校正時(shí),軸被移到一個(gè)定義的機(jī)械位置,即所謂機(jī)械零位。如果機(jī)器人在這機(jī)械零位, 那么每個(gè)軸的絕對(duì)傳感器值被存儲(chǔ)。零點(diǎn)標(biāo)定目的是使機(jī)器人各軸的軸角度與連接在各軸電機(jī)上的絕對(duì)值編碼器的脈沖計(jì)數(shù)值對(duì)應(yīng)起來的操作。具體而言,是為了求取零度姿勢(shì)的脈沖計(jì)數(shù)值的操作。
2023-11-19 16:19:411140 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論