 電子發燒友App
電子發燒友App


從2016年12月29日晚起,一位神秘高手在圍棋界掀起了“腥風血雨”。一個注冊為“Master”、標注為韓國九段的“網絡棋手”接連“踢館”頂級職業棋手,其中包括柯潔、古力、樸廷桓、陳耀燁、聶衛平、常昊等圍棋高手。
截至2017年1月4日晚,Master已經斬獲了58連勝。 2017年01月04日,圍棋大師“Master”贏了周睿羊,獲得第59場連勝的傲人戰績,與此同時,Master在公頻上宣布它就是AlphaGo。
AlphaGo作為如今人類巔峰的人工智能產品,意義重大,它為未來機器人發展奠定了堅實的基礎,當一個市場是以技術驅動的時候,來自最前沿的技術研究對于市場的影響是至關重要的。
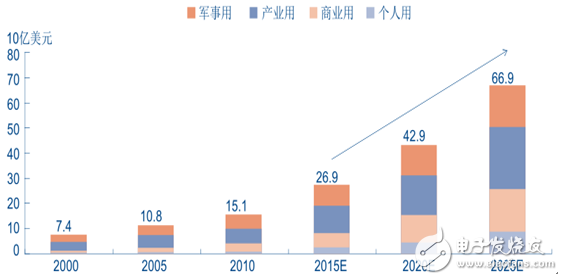
機器人產業發展情況與未來預期
日益老齡化的人口結構、不斷上漲的人工成本和全球化競爭是拉動機器人市場快速成長的重要因素。2015 年世界智能型機器人市場約為 269 億美元,今后 10 年間,CAGR(年平均成長率)將達到 9%,至 2025 年世界機器人市場將高達 669 億美元。統計數字顯示,中國是全球增長最快的工業機器人市場,從 2010 年到 2016 年,中國工業機器人的總供給量年均增長速度約為 40%。
世界機器人市場長期展望
我國工業機器人滲透率低,普及工業機器人是中國制造 2025 的基石。2015 年,全球工業機器人銷售總量為 24.8 萬臺,同比增長 8.30%。目前,中國已成為世界上最大的工業機器人市場,2015 年市場銷售量為 6.7 萬臺,占全球市場份額的 27%,同比增長 17.34%,2009-2015 年復合增長率為 51.69%。已經連續三年為全球最大的工業機器人銷售市場。然而,我國機器人密度仍然低于世界平均水平,未來有巨大的市場空間。2014 年,中國制造業每萬名員工平均擁有 36 臺工業機器人,而世界平均水平為 66 臺。相比之下,韓國、日本的機器人密度分別為 478、314 臺/萬人。相比較韓國與日本,我們認為中國工業機器人產業未來的市場增長空間非常可觀,市場規模可達到千億量級。
隨著消費需求和能力不斷上漲,未來服務機器人有望將成為機器人行業的新熱點。服務機器人主要包括專業服務機器人和個人家用服務機器人。2014 年,全球專業服務機器人銷售額為 37.7 億美元,同比增長 5.60%;個人家用服務機器人銷售金額為 22 億美元,同比增長 29.41%。根據統計,2015 年,專業服務機器人總銷量 4.11 萬臺,同比上升 25%,個人/家庭服務機器人總銷量 540 萬臺,同比增長 16%。
小編也在此盤點了2016年關注度較高的幾類機器人,一起來感受它們的魅力吧!
仿生機器人
韓研究團隊打造強大人造神經,讓超級計算機模仿人腦
這是一種微型部件,其能模仿人腦神經元之間的連接方式,功能優于之前所有人造大腦設備。這些新的人造神經是一種晶體管,或是電子開關。在開和關的過程中,它們可以模仿神經元學習的方式。
研究者在一個直徑為10厘米的晶體上組裝了144個神經元晶體管,這些晶體管中裝有直徑為200到300納米的金屬絲。其實,人類頭發的平均直徑為10萬納米,因此這些晶體管和神經元的細小程度可想而知,其消耗的能量也是非常之少。
該項目由韓國浦項工科大學打造,項目負責人、材料科學家Tae-Woo Lee表示:”這種新的研究將能夠引領未來,打造更好的機器人、自動駕駛汽車、數據挖掘、醫療診斷、股票分析,以及其他的智能人機交互系統和機器。“
距人造人更近一步,哈佛科學家用活體細胞造了一個機器人
一個來自哈佛大學的科研團隊憑借機器人工程和基因生物學的知識,利用一些豐胸用的硅膠、一小撮黃金和20萬個經基因改造過的小鼠心肌細胞,制造出了一條人造的黃貂魚,最令人驚訝的是,小魚還能不借助外力,自發地在營養液里向著光源游動。
科學家們的具體做法是:用一小塊硅膠注成黃貂魚的外形,然后利用機器人形態學的技術把少量的黃金注入硅膠里形成黃貂魚的骨骼支撐,然后在“骨骼”之上再鋪一層硅膠,這是為了防止小鼠心肌細胞直接接觸金屬造成細胞死亡,最后將活體細胞鋪在黃金骨骼之上,就構成了一個會動的人造黃貂魚。
其中,心肌細胞是依靠基因生物學的技術,切掉原始基因鏈中不需要的基因片段,嫁接上需要的,然后重新培養而成。其中科學家植入的新基因片段是一段趨光性的基因,因此該心肌細胞除了具備心臟肌肉那樣的伸縮特性,還具有趨光性。這也是為什么該人造黃貂魚不但能夠自己游動,還能趨光的原因。
目前,由于活體的心肌細胞不具備免疫系統,因此這條人造的黃貂魚還不能在營養液之外的環境中生存。但是,哈佛的科學家表示,或許可以將這條小魚作為一個起點,憑借機器人工程學和基因生物學技術的結合,未來或許能創造更大的奇跡。
日本科學家造出一個“活的”機器人,可對外界刺激自發響應
按照傳統的思路,機器人是按照科學家預先寫好的一段代碼運行,電機受代碼控制,代碼怎么寫,機器人就怎么動,這被認為是機器人和人類的最大區別之一。不過,隨著人工智能技術的不斷發展,背靠著大數據和深度學習,現在更類似于人類的機器人也屢見不鮮,比如AlphaGo就是一個例子。現在,一群來自日本東京和大阪的科學家在這個方向上又向前邁了一大步。
7月份日本國立科學博物館展出了一個新的機器人,它名叫Alter。與博物館其他機器人最大的不同在于,Alter不但擁有一張擬人的臉,也有一顆擬人的心。
如圖所示,Alter目前并非一款擁有完整雙足的人形機器人,它只有上半身,并且除了面部和小臂有仿生材料包裹之外,其他部分都是裸露的機械結構。它最重要也是最與眾不同的地方在于一顆內置的CPG(Central Pattern Generator,中樞模式發生器),CPG基于Izhikevich神經網絡技術,可以并行提取分布在Alter身體各處的多種傳感器數據,然后針對各路數據進行綜合分析,通過體內42個氣動裝置,驅動Alter自發地做出各種擬人的動作,即所謂“自發意識”,而不是像傳統機器人那樣按照既定的代碼一步一步運行。
目前,Alter能夠檢測到周邊的物體移動、溫度、濕度和聲波強度等多種不同維度的信息,從而做出不同響應。比如,當檢測到周圍有多個人向自己靠近時,Alter會自發地開始顫抖。除此之外,Alter還能根據手指的動作唱歌(目前為止只是簡單的正弦波變化),能跟普通人輕松交談10分鐘以上。
MIT成功研制人造肌肉纖維,仿生機器人已在地平線
很多年里,研究人員一直在嘗試創造出一種耐用、低成本的人造合成肌肉,但始終沒有成功。至今制造出的樣品要么太昂貴,無法量產(比如碳納米管);要么太脆弱,能耗又太高,以至于沒有多大實用價值。但就在近日, MIT 的一支研究團隊用尼龍纖維制造出了一種十分理想的、能滿足所有實用性要求的人造肌肉。
傳統的方法里,讓尼龍彎曲需要用到滑輪裝置。這增加了系統的重量、復雜度和成本——它們恰恰是是量產新技術最需要減少的三個東西。
MIT 團隊找到了一種很巧妙的方法繞過這個難題。該團隊使用的是普通的尼龍絲。他們先對它壓縮處理,把圓形的橫截面改為矩形。接著,他們只對纖維的一側進行加熱。這樣一來,加熱這一側比未加熱一側收縮得更快,強迫尼龍纖維向受熱一側彎曲。而加熱源可以是任何東西,包括電阻發熱,化學反應發熱和激光發熱。這些尼龍纖維出乎意料的非常結實耐用,可以經受 10 萬個使用周期,并且可以在一秒內收縮 17 次。
材料
有了這種皮膚,機器人能更好地表達“情緒”
康奈爾大學的研究人員研究出了一種特殊的“皮膚”,這是一種可發光的材料,柔軟性極強,可以拉伸至六倍以上并且保持發光。這種“皮膚”由兩層透明的導電水凝膠構成,兩層水凝膠之間是一排電容器,它們在通電時會發光。
這種靈感來源于章魚,它們能根據環境很快速地改變自己的皮膚顏色從而達到偽裝。研究報告第一作者、康奈爾大學機械與航空航天工程學助理教授Rob Shepherd認為這種“皮膚”將有兩種應用方向,一種是應用在機器人上,打造出能變色和顯示信息的軟體機器人;一種是能變形的顯示器。
有了這種“皮膚”,機器人不僅擁有柔軟的肢體,而且還能有自己的“情緒”表達,通過不同的顏色,機器人能展示自己的感受,從而與人類更好地溝通。
用這種液態金屬,可以造出現實版終結者
澳大利亞墨爾本市RMIT大學的研究團隊從無毒金屬鎵合金提煉了出一種特殊的導電材料,它可以自動變形,該高校的研究人員正嘗試使用這種導電的液態金屬制造電子元件。
眾所周知,金屬鎵在室溫條件下就會呈現液態,如果它與銦和錫等金屬混合加入到水中,并改變PH值,這種混合材料就可以神奇的實現自由移動。
該項目的負責人庫羅什·卡蘭塔爾-扎德赫(Kourosh Kalantar-zadeh)表示:“利用這些發現,我們可以制造自主操作的移動物體、開關或水泵,由周圍流體組合驅動自我組裝的液態金屬。”
目前的電子設備都是基于固態元件的電路,采用這種材料的電子元件就完全可以顛覆傳統的電子設備,根據需要移動和重新配置。
當然不僅這些應用場景,通過類似的原理,未來還可以將其打造出3D液態金屬機器人,就像T-1000式液態“終結者”一樣。
這種材料可實現自我驅動,自動組裝機器人軍隊
新發明的這種材料可以自動組裝,安進機器人體內,作為獨立的元件運作自如。它由球體組成,進入電場后,會自動調整到合適的形態。將來,這種材料可以用于打造一支堅韌不拔、頭腦簡單的機器人軍隊。
這項研究是一群來自韓國蔚山科學技術大學的科學家的成果。這支國際研究隊伍受到蜜蜂和螞蟻蜂擁和集體行為的啟發,他們在實驗室中用電腦模型復制了這種行為,完成了初步設計。這種叫作“Janus Colloids”的能夠實現自我驅動的材料一旦進入電場,就隨意地調節自己的狀態。
Janus Colloids有正負兩個電極。因為對稱破缺,當Collids暴露在電場中時,電極便發生變化,從而引發不同Collids之間的電磁反應。這意味著有些顆粒相斥,有些顆粒相吸,有些顆粒保持中性。所以,這些半球才能夠自然而然地變化形態,比如鏈條狀、半球狀或是團狀。目前,這個材料在電腦模型和Janus Colloids的二維系統中都測試過。科學家們希望能夠做出三維原型來展示這種材料如何運用在實際操作中。
這個團隊在暢想,在未來的某一天,這種材料能促進藥物在體內的傳輸。他們認為藥物可以放在球體內部,當身體需要它們的時候,它們就能自動組裝。這種材料既可以是獨立個體,又可以用于打造自我成型的機器人,甚至用作一支軍隊。
軟體機器人
波蘭團隊打造毛毛蟲機器人:驅動和控制全靠光線
波蘭華沙大學物理學院研究團隊運用液晶彈性體科技(該技術最初由佛羅倫薩LENS研究所研發),打造了一款15毫米長的仿生微型軟體機器人,它能夠模仿毛毛蟲的步態。值得一提的是,這款機器人能從綠色光線中吸收能量,并由激光射線控制。除了在平面上爬行,它還能爬過小坡、擠過縫隙,還能運輸東西。
液晶彈性體(LCE)是一種智能材料,它能夠在可見光的照射之下改變形狀。在結合了最新研發的技術之后,它能通過預先設定的驅動性能,將這些柔性物質變成任意一種三維形狀。這種由光線驅動的變形將能使單片LCE結構在無需許多離散致動器的情況下,進行復雜的動作操作。
研究人員希望這種新型材料、制作技術和設計策略可以打開微型軟體機器人的新大門,讓更多科學家創造更多微型和毫米級的機器人,并讓這些機器人擁有更多的技能,比如游泳(表面或水下),甚至飛行。
世界上第一個完全軟體自驅動機器人,用“氣動”取代“電動”
長期以來,機器人界一直希望造出通體由軟性材料構成的機器人,但開發出柔性的供能和控制元件一直是難點,例如現在很多研究人員紛紛都在開發柔性電池和電路板。
在8月24日的《自然》科學雜志上, 哈佛維斯生物工程研究所(Wyss Institute for Biologically Inspired Engineering)發表了名為《全軟體自主機器人的一體化設計與制造策略》(An integrated design and fabrication strategy for entirely soft, autonomous robots)的論文。哈佛大學的研究人員采取了不同以往的方法,他們獨辟蹊徑,制造出了世界上第一個完全軟體的且自我驅動的機器人,它可以獨立運行4~8分鐘。
這個外形類似小章魚的機器人真正具有里程碑意義的特點是:在沒有電池和電路板的情況下,實現自我驅動。具體而言,它不是傳統的“電動”的,而是“氣動”的。
“小章魚”依靠體內的化學反應供能,這個化學反應里,少量的過氧化氫轉變成了大量氣體,這些氣體流入“小章魚”的手臂,給手臂充氣從而引發運動。
納米機器人
世界首個納米魚機器人,在你的血管里運送藥物
據美國《新科學家》9月報道,近日科學家受魚的游泳動作啟發,研發出一款全新的“納米魚機器人”,可以應用于在人體內輸送藥物。
這個納米魚的體積十分小,比一粒沙子要小100倍。“納米魚”由磁驅動,內含微小的金和鎳組件,中間由銀制的鉸鏈作為連接。它游泳的速度和方向受磁場的方向和力量所決定。
研發該機器人的是加州大學圣地亞哥分校的研究人員,他們希望自己的發明能夠應用于醫療領域,比如把鎮痛藥物傳輸到身體需要的特定部分。
盡管其他團隊也開發出類似功能的“納米游泳機器人”,但是他們大部分長得更像是一個小潛水艇,而如何讓納米機器人向前推進,傳統的靈感來自于細菌螺旋狀的尾部。實驗發現,這個“納米魚”比以往的類似功能的機器人更加有效。
無人機
帝國理工研發無人機無線供電技術,續航有保障
多數基于機載電池的多軸無人機在單次充電后,續航時間都難以超過30分鐘,這讓它們執行任務的能力受到了很大的限制。盡管我們可以通過電纜將能源輸送給無人機,但是局限性還是很大——這僅適用于懸浮觀察之類的小范圍應用。
為了解決這個問題,日前,來自倫敦帝國理工學院的科學家們研發了一款無需電池和輸送電力的纜線就可以充電的新型無人機——它在飛行的過程中能無線攝取電量。
這項研究基于一架現成的迷你四軸飛行器。科學家們先是移除了無人機上的電池,然后在機身外表纏上了銅線圈。除此之外,研究人員還利用電路板、電源和銅線圈打造了一個獨立的無線電力傳輸平臺。當無人機接近這個平臺后,機上的銅線圈就會作為磁場的接收天線,產生交變電流,然后無人機上的修正電子會把整流轉換成直流,從而為無人機供電。這項技術被稱為“電感耦合”(Inductive Coupling),早在 Nicola Tesla(塞爾維亞裔美籍科學家,生于1856年,卒于1943年)時期就被研發出來了。
另外,除了為飛行中的無人機不斷充電之外,這項技術還可以用來為機載電池進行充電,這樣一來,無人機就不需要著陸充電或是更換電池,也就是說,它們的飛行時間可以延長很久。
無人機避障不再老大難,Vijay Kumar 用彈性減震另辟蹊徑
在賓夕法尼亞大學的 GRASP Lab 中,由 Yash Mulgaonkar, Luis Guerrero-Bonilla、Anurag Makineni 以及大名鼎鼎的 Vijay Kumar 教授組成的研究團隊一直在努力研究,如何讓四軸無人機順利穿過玻璃。由此,他們提出了一個幫小型無人機實現導航和避障的簡易方法:給它們安一個減震結構,讓它們自個兒飛去吧,不會有事兒的。
在無人機的研發過程中,賓大 GRASP Lab 團隊想要尋求生物學方面的靈感,于是他們的關注點在于有彈性的小型無人機。最后,這個團隊推出了一系列重約25克、長僅10公分的寬版微型無人機。每架無人機都有一個輕量級的、形狀類似綱踄克的自動復原減震結構。它由熱固化的紗質材質構成,包含了1萬2千股碳纖維。這款微型無人機可以由一個簡單的控制器操縱,它“不需要考慮其他機器人或是障礙所處的位置,也不需要具備碰撞反應機制。”它需要做的就是讓微型無人機更加穩定,然后將它們導向目標位置。它的運行過程非常流程,甚至當機器人沒有識別到障礙以及其他微型無人機時也可以正常運行。
運動
NABiRoS 機器人要像螃蟹一樣橫著走,另辟蹊徑挑戰仿人類行走難題
隸屬加利福尼亞大學洛杉磯分校的 Dennis Hong 機器人及機械實驗室( RoMeLa )提出了一項全新的機器人設計方案——讓機器人采取全新的雙足步行方式。通過擬人設計與類人化側身實驗,他們已經能夠創造出穩定又敏捷的機器人,不僅操作簡單而且價格便宜。
Hong 表示:“與完全模仿人類行走不同,我們提出的是一種簡單的解決方案:我們在這種全新的結構配置中加入了‘機械智能’為機器人的速度、穩定性與易用性提供幫助,使得“機器人移動”能夠在現實生活中實用有效。”
RoMeLa 是資深類人機器人研究團隊,我們知道的 DARwIn、CHARLI、SAFFiR 與 THOR 都出自他們之手。這些現有成果全部采用傳統人形設計,盡可能去模仿人類外觀與能力。
新突破,波士頓動力的 Atlas 會走“梅花樁”了
Atlas 最近確實有了較大提升,借助佛羅里達理工學院人類和機器人認知(IHMC)研究人員開發的算法,雖然有些踉踉蹌蹌,但它能做出許多此前根本不敢想象的動作了。
現在,當 Atlas 遇到一個不均勻的立足點,它會像你我一樣先將腳伸過去探一下虛實,確定立足點足夠安全后它才會信心百倍的將全身的重量轉移過去。如果下一步依然忐忑,Atlas 依然會重復之前的試探動作。整個過程中,為了保持平衡研發人員將 Atlas 快速和動態的步伐與角動量結合了起來。
每秒跳躍2.2米,世界最敏捷的跳躍機器人誕生
在剛剛發布的全新版《機器人科學》期刊中,Haldane 與 M. M. Plecnik、J. K. Yim 、R. S. Fearing 聯合展示了一款只有 100 g 重但彈跳驚人的機器人設計——他們利用夜猴的彈跳秘密成功研發出前所未有的敏捷的機器人。
彈跳的有效運動絕不僅僅在于你能夠跳的多遠——更關鍵的也在于你能達到的彈跳頻率。研究者們提到的“敏捷度”是指機器人在不斷跳躍過程中能達到的跳躍高度,更專業的說法是“跳躍系統在不斷重復跳躍時能達到的最大平均垂直速度”。如果是夜猴,0.78 秒的時間內能跳到 1.7 米的高度,那么敏捷度就是 2.2 m/s。







 工商網監
工商網監
評論