 電子發燒友App
電子發燒友App


中科新松有限公司在第一代協作機器人的設計和研發中整合了Elmo的終極多軸運動控制解決方案
中國的機器人公司“新松”全面采用Elmo終極的運動控制解決方案作為第一代協作機器人的最新設計,該設計解決了新一代產品研發中遇到的諸多挑戰。
想象一下一個機器人完美地模擬一位太極拳大師的動作,動作精準、平滑、充滿力感。
考慮一下在真實的工廠里面一個集成協作機器人與人類員工合作的重要意義,這種協作還要滿足嚴苛和強制的安全約束條件。
采用了Elmo獨一無二的、高級的伺服驅動技術,這家在中國機器人和自動化領域領先的公司剛剛完成第一代人機協作的工廠自動化機器人的自主研發。
Elmo提供了超小型、功能強大的基于網絡型的伺服驅動器,這些驅動器直接安裝在關節上。
這一應用體現了Elmo驅動器在諸多方面的獨有優勢,如效率、堅固程度、省空間、最少電纜用量、低EMI指數和整個系統可靠性的提升。在設計制造復雜的7軸協作機器人的時候,使用雙閉環控制和采用高分辨率絕對值編碼器獲得最優伺服性能只是眾多挑戰中的一部分。Elmo在高端機器人領域里的應用實例可以作為客戶在研發過程中追求最高多軸運動控制性能時的指導性參考。
摘要
協作機器人被設計用來與人在工廠生產線上緊密協同工作,這一趨勢正變得越來越普遍。
在人機協作的環境中,這些機器人被用來去完成高速、高精度的任務。使用相機、力傳感器和其他感知元件,這些機器人可以感知人的存在并做出相應動作避免對人的傷害,有的時候機器人的動作會完全停下來。
設計協作機器人通常是用來靈活地處理小的零件,進行一些輔助性工作如安裝消費類電子器件,而不是用來完成重載任務如搬運重物,焊接或者噴漆等。
典型的協作機器人的結構都相對小巧和輕便,盡管如此它還是有能力提升相對重的負載,提升重量可達100kg.
除了具有動作靈巧的特點,協作機器人還需要具備感知零件是否準確安裝的能力,這一特點在前幾代重型工業機器人身上是不可想象的。
老一代傳統6關節機器人在移動它們的關節時扭矩比較大,容易對接近的人員造成傷害。
新一代機器人具備一個附加關節或自由度。
與傳統的6關節機器人相比,7關節機器人可以以多角度伸展機械臂接近一個特定的原件,因而可以避免觸碰人員,繼續執行工作任務。
此外,運動學冗余對于在一個特定的空間內操作幾個機器人也是很有用處的,因為運動干涉很容易處理。
協作機器人另一個額外特點是可以力矩感知、控制和限制。機器人感知外部極小的力矩變化并做出反應避免碰撞。
在有些情況下,力矩傳感器被放置在電機減速箱的后面來直接檢測外部力矩的任何快速增加的變化, 而其他時候,機器人需要輸出一定扭矩去提升負載和把負載從一個位置移動到另一個位置。
當機器人識別出運動過程中一個異常扭矩增加值,如碰撞,會自動停下來。
碰撞檢測和規避機制的另外一個特點是當接觸到物體或人員時進行工作模式轉換,從非柔性全速模式(循環同步位置模式或循環同步速度模式)轉換到力矩模式(循環同步力矩模式)。
柔順的循環力矩模式使得人員可以用手很輕易地推開機械手臂。機器人可以在觸碰物體時自動進入柔順模式,或者在全速模式下運行。
另一個重要模式是示教模式,在這個模式下,操作人員移動機械手臂到預定位置,Elmo控制器記錄下這些位置點以便在正常操作模式下復現設定軌跡。
值得一提的是,在示教過程中,Elmo的方案提供了令人難以置信的敏感性和分辨率。示教過程簡單,系統操作人員無需具備超強的編程能力,真正實現無編程運動控制的實現。
Elmo的解決方案
伺服驅動器:
Elmo的超小體積、性能強大的伺服驅動器被用來完成這項挑戰任務。
伺服驅動器直接安裝在機器人關節上,保證了機器人尺寸小巧結構緊湊。
兩個大功率的超小體積驅動器Gold SOLO GUITAR用來驅動兩個基礎關節電機,以支撐整個機械結構的運轉。
這款驅動器的持續50Amp和峰值100Amp的電流輸出能力足以驅動電機在高速、高加速度和高減速度的狀況下運行。
此外,五個迷你型Gold SOLO WHISTLE驅動器可以輸出持續20Amp和峰值40Amp電流,用以驅動另外五個關節。
系統里的每個驅動器既可以在高速、高加減速情況下運行,又可以在低速情況下運行,并且都能保證極高的精度和準確性。用同一款驅動器實現反差如此巨大的高低速操作是得益于驅動器1:2000的動態電流范圍和非常寬的帶寬響應。
一個驅動器物理尺寸足夠小到能直接安裝在機器人關節上,幾乎是這種復雜機器人項目的唯一選擇。
把驅動器放置在離編碼器反饋足夠近的地方可以節省電纜,減少干擾影響,獲得比較低的EMI和RFI指標,系統穩定性大大提升。
另一個讓驅動器更易集成進關節的特性是驅動器固有的堅固性,可以承受關節內極高的機械加減速度。
Elmo應用工具
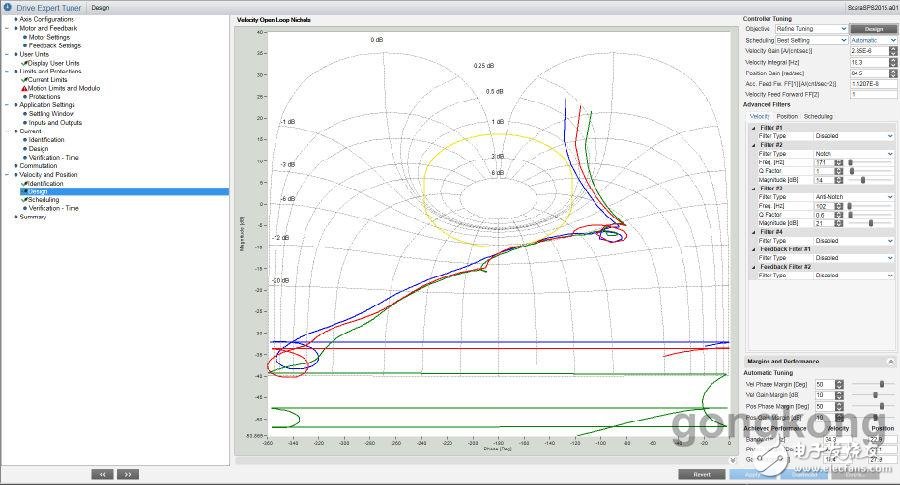
Elmo高級且易用的配置工具,EASII軟件,可以幫助客戶調試網絡中的每個軸,達到最優的伺服性能。
系統辨識、合適的控制器設計、使用高階濾波器克服機械系統缺陷等可以提升系統獲得最優伺服性能,這僅僅是這個工具的一部分功能。
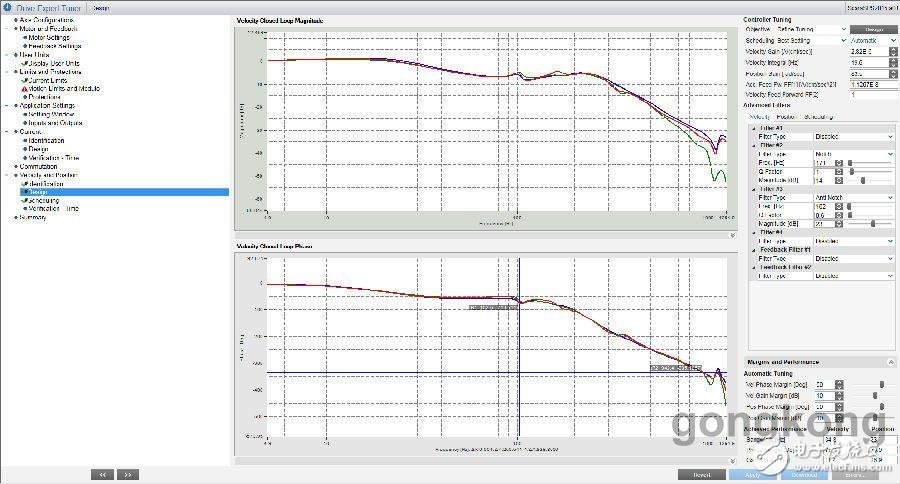
此外,使用帶特殊位置分組增益的簡單、高級的系統辨識方法進行多軸系統辨識可以消除不同軸之間的交叉影響。在這個應用中還用到了更多其他具有特色的功能,最終目標是獲得最高帶寬、最快的響應時間,同時保證機器人運行穩定、平滑,并且具有很高的裕度。
系統里的每個軸采用雙閉環控制算法來提高減速機后端關節末端位置的定位精度。
增量式編碼器和Hall元件作為速度環反饋置于減速箱前端,19位高分辨率絕對值編碼器作為負載末端位置反饋,這樣的用法只是Elmo金線系列驅動器的一個標準用法。
雙閉環控制算法可以提升伺服電機性能達到最優狀態。
Elmo提供PCB插針安裝式驅動器,也可以同時配套提供接口轉接板,這允許客戶通過轉接板連接EtherCAT總線、IO和編碼器反饋。
白金版Maestro,終極多軸運動控制器
控制整個系統的是Elmo高級的多軸運動控制器P-MAS,通過實時串行EtherCAT總線在250us內同步16個軸(最短可現實100us內同步8個軸)。
Elmo的高級多軸運動控制器P-MAS可以提供內容豐富的機器人運動學功能,例如Cartesian, SCARA,3-Link,Delta等等,使用這些功能就可以很容易應對機器人應用的挑戰。
內置的運動學功能支持MCS(機器坐標系)和PCS(產品坐標系),在翻轉、傳送和其他外部裝置中可以實現完全同步。
此外,P-MAS為客戶應用預留了一個實時內核。這部分內核允許機器人開發用戶編寫自己特殊的運動學轉換方程,這一功能使得P-MAS支持任何高端的機器人,幾乎不受類型限制,因為客戶可以針對應用編寫自己的運動學功能。
對于這種在250us總線循環時間內完成機器人運動學正逆解計算的應用必須使用基于四核強大處理器的多軸運動控制器P-MAS。
運動學方程解算是在用戶實時應用程中進行的,計算系統中所有軸的目標位置、目標速度或扭矩并在每個EtherCAT總線周期輸出。
DS-402協議中的循環同步模式是Elmo的EtherCAT版本驅動器的內置標準操作模式。
在P-MAS和上位主機、PLC或HMI之間多種標準和專門的通訊協議使得P-MAS與第三方設備通訊變得十分容易,如觸摸屏、手操板、PLC和PC機等。
與上位主機的通訊能力如Ethernet, TCP/IP和UDP協議,快速的二進制協議如MODBUS和Ethernet/IP, 使得與上位主機之間的通訊變得快速而有效。
機器人工作在兩種模式,第一種是示教模式,第二種是工作模式。
在示教模式下,操作人員可以沿著需要的工作路徑移動機器人手臂到一些關鍵位置點上,在移動過程中多軸運動控制器記錄下相關的位置點以便在工作模式下復現工作路徑。
在示教模式下伺服驅動器是運行在同步循環力矩模式。除了目標力矩命令外,多軸運動控制器還會輸出額外的補償力矩去克服重力、機器人動力學等阻抗因素,維持拖拽過程平滑。
這種復雜機器人解決方案的亮點之一就是整個示教過程對一個不會編程的操作人員來說十分簡單,大部分工作不需要具有編程經驗或技巧就可以完成。
第二種操作模式就是正常工作模式,在這種模式下多軸控制器根據機器人的運動學模型來計算七個軸的目標位置和速度(DH矩陣逆解),如果必要的話,基于機器人動力學模型的補償力矩會被加到總的輸出力矩中。伺服驅動器是工作在循環同步位置模式或者循環同步速度模式,接收目標位置/速度命令和力矩偏置命令。
方案亮點
?無可匹敵的伺服驅動器性能
?可以做到250us內16個軸完全同步和坐標運動
?小體積、高功率的伺服驅動器直接安裝在關節上
?超大動態電流范圍適于高速和高精度
?雙閉環控制性能
?支持多種反饋(增量式編碼器和絕對值編碼器)
?使用性能強大的多軸控制器實現同步和機器人運動學計算
?快速、實時的EtherCAT總線網絡
?最優的伺服驅動器性能—高帶寬帶來的就是快速的響應時間
?功能強大的EASII軟件使機器人的配置和實施變得很容易
?最高效率和極致的穩定性
?堅固耐用,驅動器可以安裝在任何位置
?RFI很低的EMI和RFI指數
總結
對于中科新松有限公司最新一代科技產品協作機器人來說,Elmo的智能、小體積和簡單易用的伺服和運動控制解決方案大大提升了其產品的性能,并且增強了產品的功能性。







 工商網監
工商網監
評論