工作原理 目前主流的伺服驅(qū)動器均采用數(shù)字信號處理器(DSP)作為控制核心, 伺服驅(qū)動器(圖1) 可以實(shí)現(xiàn)比較復(fù)雜的控制算法,實(shí)現(xiàn)數(shù)字化、網(wǎng)絡(luò)化和智能化。功率器件普遍采用以智能功率模塊(IPM)為核心
2023-09-14 14:49:56 109
109 
伺服系統(tǒng)主要由伺服驅(qū)動器、編碼器和伺服電機(jī)等部件構(gòu)成。伺服系統(tǒng)是一種自動控制系統(tǒng),能使物體的位置、方位、狀態(tài)等輸出被控量跟隨輸入目標(biāo)(或給定值)的變化而變化。伺服驅(qū)動器在接收下達(dá)的控制命令后,會發(fā)
2023-08-27 08:08:51429 
伺服電機(jī)的工作原理是通過內(nèi)部的反饋系統(tǒng),對電機(jī)的運(yùn)轉(zhuǎn)狀態(tài)進(jìn)行監(jiān)測和調(diào)整,使得電機(jī)能夠在預(yù)定的位置和速度上運(yùn)轉(zhuǎn)。在伺服電機(jī)中,通常會采用編碼器作為反饋傳感器,通過檢測電機(jī)轉(zhuǎn)子的位置和速度信號,以實(shí)現(xiàn)對電機(jī)的控制和調(diào)整。
2023-08-26 11:06:03578 ▲步進(jìn)電機(jī)結(jié)構(gòu)圖▲伺服電機(jī)結(jié)構(gòu)圖下文簡單敘述它們的差異:1、工作原理這兩種電機(jī)在原理上有很大的不同,步進(jìn)電機(jī)是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件,
2023-08-22 08:08:47757 在現(xiàn)代工業(yè)領(lǐng)域,伺服驅(qū)動器是一種關(guān)鍵的電氣裝置,它在機(jī)器控制和運(yùn)動控制系統(tǒng)中發(fā)揮著至關(guān)重要的作用。無論是工業(yè)機(jī)器人、數(shù)控機(jī)床還是自動化生產(chǎn)線,伺服驅(qū)動器都是實(shí)現(xiàn)精準(zhǔn)位置控制和高效運(yùn)動控制的關(guān)鍵組件。本文將介紹伺服驅(qū)動器的工作原理、應(yīng)用領(lǐng)域以及在現(xiàn)代工業(yè)中的重要作用。
2023-08-21 17:34:02874 工作原理 目前主流的伺服驅(qū)動器均采用數(shù)字信號處理器(DSP)作為控制核心, 伺服驅(qū)動器(圖1) 可以實(shí)現(xiàn)比較復(fù)雜的控制算法,實(shí)現(xiàn)數(shù)字化、網(wǎng)絡(luò)化和智能化。功率器件普遍采用以智能功率模塊(IPM)為核心
2023-08-14 14:53:24187 伺服電機(jī)具有獨(dú)特的特性,即根據(jù)輸入信號的脈沖寬度轉(zhuǎn)向特定角度(0,90,180)。這些伺服電機(jī)廣泛用于機(jī)器人應(yīng)用、機(jī)械控制等。通常微控制器將用于控制伺服電機(jī),但偶爾您會發(fā)現(xiàn)一些其他IC用于此目的。本文介紹了伺服電機(jī)的工作原理和工作原理。
2023-06-29 15:44:29798 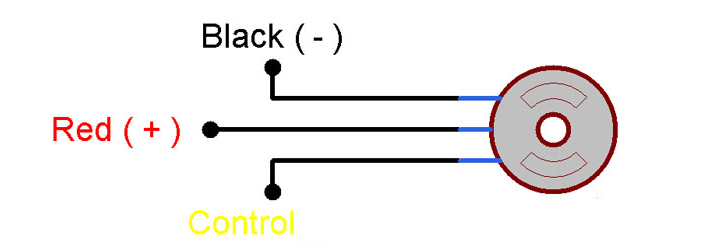
信號來控制電機(jī)的轉(zhuǎn)動角度和速度。 步進(jìn)伺服是一種基于步進(jìn)電機(jī)的改進(jìn)型產(chǎn)品,其工作原理是在步進(jìn)電機(jī)上增加了閉環(huán)控制系統(tǒng),以實(shí)現(xiàn)更高的精度和穩(wěn)定性。步進(jìn)伺服可以通過反饋控制器獲取電機(jī)的實(shí)際位置和速度信息,并與設(shè)
2023-06-13 08:30:02259 步進(jìn)伺服是集成了編碼器的步進(jìn)電機(jī),可以反饋電機(jī)的運(yùn)動位置、轉(zhuǎn)矩以及轉(zhuǎn)速信息,其他地方同普通的步進(jìn)電機(jī)基本相同。 說到步進(jìn)電機(jī),它是一種將電脈沖信號轉(zhuǎn)換為機(jī)械運(yùn)動的電機(jī),工作原理基于磁場相互作用和電流
2023-05-27 20:55:01154 伺服驅(qū)動器在控制信號的作用下驅(qū)動執(zhí)行電機(jī),因此驅(qū)動器是否能正常工作直接影響設(shè)備的整體性能。在伺服控制系統(tǒng)中,伺服驅(qū)動器相當(dāng)于大腦,執(zhí)行電機(jī)相當(dāng)于手腳。
而伺服驅(qū)動器在伺服控制系統(tǒng)中的作用就是調(diào)節(jié)電機(jī)的轉(zhuǎn)速,因此也是一個(gè)自動調(diào)速系統(tǒng)。
2023-05-17 10:05:121497 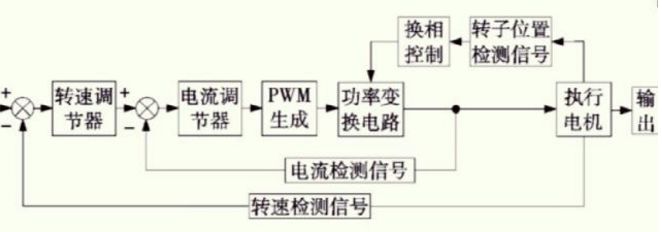
伺服驅(qū)動電機(jī),簡稱伺服電機(jī),是在普通電機(jī)的基礎(chǔ)上集成編碼器的產(chǎn)物。
2023-05-08 09:55:13281 伺服設(shè)備工作原理 1、伺服系統(tǒng)(servo mechanism)是使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(biāo)(或給定值)的任意變化的自動控制系統(tǒng)。伺服主要靠脈沖來定位,基本上可以這樣理解
2023-04-19 10:47:24302 步進(jìn)電機(jī)和伺服電機(jī)哪個(gè)好,這個(gè)沒有絕對的答案,適合的才是最好的!下面從步進(jìn)電機(jī)和伺服電機(jī)各種的優(yōu)缺點(diǎn)、性能特點(diǎn)
進(jìn)行分析:
步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成
2023-03-23 11:07:32 4
4 在定位系統(tǒng)中,最常用的電機(jī)不外乎是步進(jìn)電機(jī)和伺服電機(jī),其中步進(jìn)電機(jī)主要可分為2相、5相、微步進(jìn)統(tǒng),伺服電機(jī)則主要分為DC伺服和AC伺服兩種。
2相、5相和微步進(jìn)系統(tǒng)主要是驅(qū)動器所表現(xiàn)出來分辨率
2023-03-22 10:38:501 ??步進(jìn)電機(jī)作為一種開環(huán)控制的系統(tǒng),和現(xiàn)代數(shù)字控制技術(shù)有著本質(zhì)的聯(lián)系。在目前國內(nèi)的數(shù)字控制系統(tǒng)中,步進(jìn)電機(jī)的應(yīng)用十分廣泛。隨著全數(shù)字式交流伺服系統(tǒng)的出現(xiàn),交流伺服電機(jī)也越來越多地應(yīng)用于數(shù)字控制系統(tǒng)中
2023-03-21 14:55:020 °、0.036°,兼容了兩相和五相混合式步進(jìn)電機(jī)的步距角。交流伺服電機(jī)的控制精度由電機(jī)軸后端的旋轉(zhuǎn)編碼器保證。以松下全數(shù)字式交流伺服電機(jī)為例,對于帶標(biāo)準(zhǔn)2500線編碼器的電機(jī)而言,由于驅(qū)動器內(nèi)部采用
2016-08-19 22:01:04
其他各種電子產(chǎn)品中。其驅(qū)動原理是什么呢? 1、步進(jìn)電機(jī)的工作原理: 步進(jìn)電機(jī)的工作原理是通過控制接線線圈的電流變化而實(shí)現(xiàn)轉(zhuǎn)動的,只要以恒定的頻率控制線圈的電流,就可以使電機(jī)實(shí)現(xiàn)轉(zhuǎn)動,從而實(shí)現(xiàn)精確的位移控制。 2、步進(jìn)
2023-03-14 14:12:513225 伺服驅(qū)動系統(tǒng)的基本概念伺服系統(tǒng)是數(shù)控機(jī)床的重要組成部分,是連接數(shù)控裝置(計(jì)算機(jī))和機(jī)床之間的關(guān)鍵橋梁,伺服系統(tǒng)的性能在很大程度上決定了數(shù)控機(jī)床的性能,如數(shù)控機(jī)床的定位精度、跟蹤精度、最高移動速度等重要指標(biāo)。
2023-03-06 14:49:081110 繼步進(jìn)電機(jī)的結(jié)構(gòu)之后,本文將介紹步進(jìn)電機(jī)的基本工作原理。步進(jìn)電機(jī)的基本工作原理(單相勵(lì)磁),下面使用下圖來介紹步進(jìn)電機(jī)的基本工作原理。這是上一篇“步進(jìn)電機(jī)的結(jié)構(gòu)”中給出的兩相雙極型線圈每一相(一組線圈)的勵(lì)磁示例。
2023-02-24 09:51:101610 
伺服系統(tǒng)的工作原理 伺服系統(tǒng)(servomechanism)又稱隨動系統(tǒng),是用來精確地跟隨或復(fù)現(xiàn)某個(gè)過程的反饋控制系統(tǒng)。伺服系統(tǒng)使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(biāo)(或給定值)的任意
2023-02-08 14:11:461204 交流伺服電動機(jī)的工作原理與分相式單相異步電機(jī)雖然相似,但前者的轉(zhuǎn)子電阻比后者大得多,所以伺服電動機(jī)與單機(jī)異步電動機(jī)相比。
2023-01-10 16:00:272228 電機(jī)驅(qū)動器是一種必不可少的設(shè)備,可為步進(jìn)電機(jī)提供所需的電壓和電流,使其平穩(wěn)運(yùn)行。步進(jìn)電機(jī)是一種步進(jìn)式轉(zhuǎn)動的直流電機(jī),它無法直接接到直流或交流電源上工作,必須使用專用的驅(qū)動電源(步進(jìn)電機(jī)驅(qū)動器)。
2022-11-07 15:45:136214 
伺服系統(tǒng)是一種自動控制系統(tǒng),能使物體的位置、方位、狀態(tài)等輸出被控量跟隨輸入目標(biāo)(或給定值)的變化而變化。伺服驅(qū)動器在接收下達(dá)的控制命令后,會發(fā)出信號給伺服電機(jī)驅(qū)動其轉(zhuǎn)動;
2022-11-07 15:02:517956 工作原理 目前主流的伺服驅(qū)動器均采用數(shù)字信號處理器(DSP)作為控制核心, 伺服驅(qū)動器(圖1) 可以實(shí)現(xiàn)比較復(fù)雜的控制算法,實(shí)現(xiàn)數(shù)字化、網(wǎng)絡(luò)化和智能化。功率器件普遍采用以智能功率模塊(IPM)為核心
2022-10-27 08:40:563519 伺服驅(qū)動器工作原理: 目前主流的伺服驅(qū)動器均采用數(shù)字信號處理器(DSP)作為控制核心,可以實(shí)現(xiàn)比較復(fù)雜的控制算法,實(shí)現(xiàn)數(shù)字化、網(wǎng)絡(luò)化和智能化。功率器件普遍采用以智能功率模塊(IPM)為核心設(shè)計(jì)的驅(qū)動
2022-10-21 09:01:541082 作為我們生活中最常見的控制系統(tǒng)之一,芝識課堂已經(jīng)講解了步進(jìn)電機(jī)的應(yīng)用、特點(diǎn)及分類,朋友們一定好奇步進(jìn)電機(jī)是怎么進(jìn)行工作的吧?那今天我們就跟隨步進(jìn)電機(jī)的節(jié)奏一步步來學(xué)習(xí)了解步進(jìn)電機(jī)的工作原理吧!
2022-10-17 16:29:463556 伺服驅(qū)動器(servo drives)又稱為“伺服控制器”、“伺服放大器”,是用來控制伺服電機(jī)的一種控制器,其作用類似于變頻器作用于普通交流馬達(dá),屬于伺服系統(tǒng)的一部分,主要應(yīng)用于高精度的定位系統(tǒng)
2022-10-09 14:38:473240 步進(jìn)電機(jī)是一種用于能準(zhǔn)確控制位置和速度的特種電機(jī)。由于步進(jìn)電機(jī)工作成本低、驅(qū)動器不易損壞,非常適用于微電腦和單片機(jī)控制,廣泛的應(yīng)用在各行各業(yè)。 步進(jìn)電機(jī)工作原理: 步進(jìn)電機(jī)驅(qū)動器通過內(nèi)部的邏輯電路來
2021-08-11 18:04:0030552 控制,實(shí)現(xiàn)高精度的傳動系統(tǒng)定位,是傳動技術(shù)的高端產(chǎn)品。 ? ? 工作原理: ? ? ? ?安川伺服驅(qū)動器維修安川伺服驅(qū)動器是用來控制伺服電機(jī)的,作用類似于變頻器驅(qū)動交流電機(jī),屬于伺服系統(tǒng)的一部分。 ? ? ? ?安川伺服驅(qū)動器采
2021-08-06 20:26:544694 伺服電機(jī)工作原理 在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動機(jī)稱為伺服電機(jī),它是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)能夠控制速度,并且伺服電機(jī)的位置精度非常的高,能夠?qū)㈦妷盒盘栟D(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動控制對象
2021-08-06 17:44:5231299 的工作原理: 轉(zhuǎn)子上均勻分布著很多小齒,定子齒有三個(gè)勵(lì)磁繞阻,其幾何軸線依次分別與轉(zhuǎn)子齒軸線錯(cuò)開。電機(jī)的位置和速度由導(dǎo)電次數(shù)和頻率成一一對應(yīng)關(guān)系。而方向由導(dǎo)電順序決定。市場上一般以二、三、四、五相的反應(yīng)式步進(jìn)機(jī)居多
2021-08-04 09:42:255006 控制,實(shí)現(xiàn)高精度的傳動系統(tǒng)定位,是傳動技術(shù)的高端產(chǎn)品。 ? ? 工作原理: ? ? ? ?安川伺服驅(qū)動器維修安川伺服驅(qū)動器是用來控制伺服電機(jī)的,作用類似于變頻器驅(qū)動交流電機(jī),屬于伺服系統(tǒng)的一部分。 ? ? ? ?安川伺服驅(qū)動器采
2021-08-04 09:15:104572 三洋伺服電機(jī)的工作原理: 伺服是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。 ? ? ? ?伺服電機(jī)分為直流和交流伺服電動機(jī)兩大類,其主要特點(diǎn)是,當(dāng)信號電壓為零時(shí)無自轉(zhuǎn)現(xiàn)象
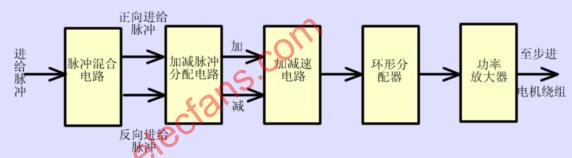
2021-07-20 16:53:473626 步進(jìn)電機(jī)是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件,通過控制施加在電機(jī)線圈上的電脈沖順序、頻率和數(shù)量,可以實(shí)現(xiàn)對步進(jìn)電機(jī)的轉(zhuǎn)向、速度和旋轉(zhuǎn)角度的控制。 1、工作原理 步進(jìn)電機(jī)驅(qū)動器根據(jù)
2021-07-19 11:24:226850 控制,實(shí)現(xiàn)高精度的傳動系統(tǒng)定位,是傳動技術(shù)的高端產(chǎn)品。 ? ? 工作原理: ? ? ? ?安川伺服驅(qū)動器維修安川伺服驅(qū)動器是用來控制伺服電機(jī)的,作用類似于變頻器驅(qū)動交流電機(jī),屬于伺服系統(tǒng)的一部分。 ? ? ? ?安川伺服驅(qū)動器采
2021-07-16 11:23:413986 伺服驅(qū)動系統(tǒng)的控制對象是機(jī)床坐標(biāo)軸的位移和速度,執(zhí)行機(jī)構(gòu)是伺服電機(jī)或步進(jìn)電動機(jī);對輸入指令信號進(jìn)行控制和功率放大的部分稱為伺服放大器(亦稱驅(qū)動器、伺服單元等),它是伺服驅(qū)動的核心。
2020-11-23 14:34:182555 電機(jī)按設(shè)定的方向轉(zhuǎn)動一個(gè)固定的角度。 可以通過控制脈沖個(gè)數(shù)來控制角位移量,從而達(dá)到準(zhǔn)確定位的目的;同時(shí)可以通過控制脈沖頻率來控制電機(jī)轉(zhuǎn)動的速度和加速度,從而達(dá)到調(diào)速的目的。 步進(jìn)電機(jī)工作原理:當(dāng)電流流過定子繞
2020-09-09 09:44:0212795 步進(jìn)電機(jī)驅(qū)動器電路設(shè)計(jì)解析步進(jìn)電機(jī)在控制系統(tǒng)中具有普遍的應(yīng)用。它能夠把脈沖信號轉(zhuǎn)換成角位移并且可用作電磁制動輪、電磁差分器、或角位移發(fā)作器等。本文重點(diǎn)介紹下步進(jìn)驅(qū)動器工作原理,以及步進(jìn)電機(jī)驅(qū)動器上撥碼開關(guān)怎樣設(shè)置。
2020-05-21 10:51:3219428 伺服驅(qū)動器是用來驅(qū)動伺服電機(jī)的,伺服電機(jī)可以是步進(jìn)電機(jī),也可以是交流異步電機(jī),主要為了實(shí)現(xiàn)快速、精確定位,像那種走走停停、精度要求很高的場合用的很多。
2019-12-11 10:53:061240 伺服驅(qū)動器在控制信號的作用下驅(qū)動執(zhí)行電機(jī),因此驅(qū)動器是否能正常工作直接影響設(shè)備的整體性能。在伺服控制系統(tǒng)中,伺服驅(qū)動器相當(dāng)于大腦,執(zhí)行電機(jī)相當(dāng)于手腳。而伺服驅(qū)動器在伺服控制系統(tǒng)中的作用就是調(diào)節(jié)電機(jī)的轉(zhuǎn)速,因此也是一個(gè)自動調(diào)速系統(tǒng)。
2019-10-07 17:08:0048010 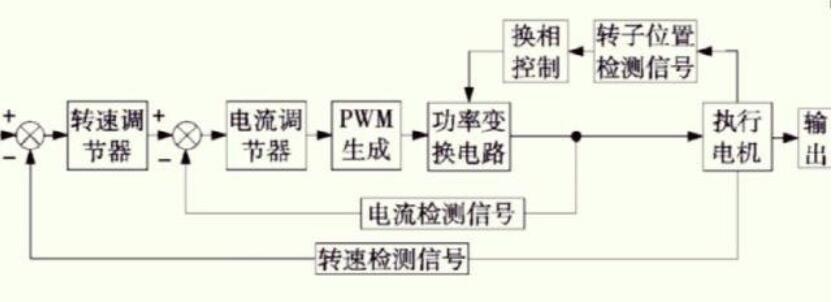
本文首先介紹看伺服系統(tǒng)的結(jié)構(gòu)組成與工作原理,其次介紹了伺服系統(tǒng)分類及基本要求與特點(diǎn),最后介紹了伺服系統(tǒng)在自動化生產(chǎn)中的應(yīng)用。
2018-06-01 17:06:0932160 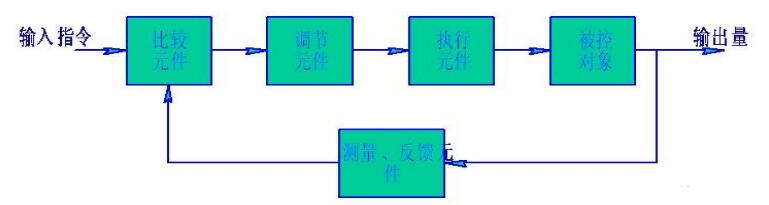
本文首先介紹了步進(jìn)電動機(jī)的相關(guān)概念和步進(jìn)電動機(jī)的分類,其次介紹了步進(jìn)電動機(jī)工作原理,最后分析了步進(jìn)電動機(jī)為什么需要驅(qū)動電路才能正常工作。
2018-05-15 17:05:569109 本文首先介紹了步進(jìn)電機(jī)和舵機(jī)及伺服電機(jī)的區(qū)別,其次介紹了步進(jìn)電機(jī)基本原理,最后介紹了舵機(jī)的構(gòu)造的原理及介紹了伺服電機(jī)的工作原理。
2018-05-11 08:45:27128089 。這一線性關(guān)系的存在,加上步進(jìn)電機(jī)只有周期性的誤差而無累積誤差等特點(diǎn)。使得在速度、位置等控制領(lǐng)域用步進(jìn)電機(jī)來控制變的非常的簡單。本文小編主要介紹的是反應(yīng)式步進(jìn)電機(jī)的結(jié)構(gòu)及工作原理,以三相及四相反應(yīng)式步進(jìn)電機(jī)為例子詳細(xì)解說其工作原理。
2018-04-25 11:28:3531075 交流伺服電機(jī)的工作原理:伺服系統(tǒng)- -般由伺服放大器和伺服電機(jī)構(gòu)成。伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,伺服放大器控制的U,V,W 三相電形成電磁場,轉(zhuǎn)子在此磁場的作用下轉(zhuǎn)動,同時(shí)電機(jī)自帶的編碼器反饋信號給驅(qū)動器,驅(qū)動器根據(jù)反饋值與目標(biāo)值進(jìn)行比較,調(diào)整轉(zhuǎn)子轉(zhuǎn)動的角度。伺服電機(jī)的精度決定于編碼器的分辨率。
2017-10-17 09:28:1122 步進(jìn)電機(jī)伺服系統(tǒng)是典型的開環(huán)控制系統(tǒng),指令信號是單向流動的。開環(huán)系統(tǒng)沒有位置和速度反饋回路,省去了檢測裝置,其精度主要由步進(jìn)電機(jī)來決定,速度也受到步進(jìn)電機(jī)性能的限制,系統(tǒng)簡單可靠,不需要像閉環(huán)伺服系統(tǒng)那樣進(jìn)行復(fù)雜的設(shè)計(jì)計(jì)算與試驗(yàn)驗(yàn)證。
2017-06-12 15:32:5814571 
伺服驅(qū)動器是用來驅(qū)動伺服電機(jī)的,伺服電機(jī)可以是步進(jìn)電機(jī),也可以是交流異步電機(jī),主要為了實(shí)現(xiàn)快速、精確定位,像那種走走停停、精度要求很高的場合用的很多。
2017-04-21 16:18:3223159 步進(jìn)電機(jī)工作原理的介紹
2017-01-03 17:40:489 步進(jìn)電機(jī)及驅(qū)動電路工作原理及工作方式介紹
2016-05-11 18:00:0859 伺服系統(tǒng)按其驅(qū)動元件劃分,有步進(jìn)式伺服系統(tǒng)、直流電動機(jī)伺服系統(tǒng)、交流電動機(jī)伺服系統(tǒng)。按控制方式劃分,有開環(huán)伺服系統(tǒng)、閉環(huán)伺服系統(tǒng)和半閉環(huán)伺服系統(tǒng)等。
2011-07-10 17:15:042131 
派克伺服驅(qū)動器工作原理在伺服驅(qū)動產(chǎn)品已經(jīng)被廣泛應(yīng)用在機(jī)床行業(yè),數(shù)控加工行業(yè)。文章簡要介紹新一代伺服發(fā)展的方向,并詳細(xì)論述新一代伺服產(chǎn)品特點(diǎn),提出了新一代伺服
2011-01-02 13:09:564179 
1.步進(jìn)電機(jī)的結(jié)構(gòu)和工作原理2.步進(jìn)電機(jī)的主要特性1).步距角和靜態(tài)步距誤差 步距角指步進(jìn)電機(jī)定子繞組通電狀態(tài)每改變一次,轉(zhuǎn)子轉(zhuǎn)過的角度。步距角計(jì)
2010-02-24 10:12:2060 伺服電機(jī)工作原理
伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動器控制的U/V/W三相電形成電磁場,轉(zhuǎn)子在此磁場的作用下轉(zhuǎn)動,同時(shí)電機(jī)自帶的編碼器反饋信號給
2010-01-09 21:09:463037 感應(yīng)子式步進(jìn)電機(jī)工作原理
(一)反應(yīng)式步進(jìn)電機(jī)原理由于反應(yīng)式步進(jìn)電機(jī)工作原理比較簡單。下面先敘述三相反應(yīng)式步進(jìn)電機(jī)原
2010-01-09 15:09:451863 
VID29系列步進(jìn)電機(jī)的工作原理
VID29系列步進(jìn)電機(jī)是兩相步進(jìn)電機(jī)經(jīng)三級齒輪減速傳動輸出的。該步進(jìn)電機(jī)的工作原理可以用下面的
2010-01-09 14:08:403017 交流伺服電機(jī)的工作原理
伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動器控制的U/V/W三相電形成電磁場,轉(zhuǎn)子在此磁場的作用下轉(zhuǎn)動,同時(shí)電
2009-10-25 14:33:493621 用于單電源系統(tǒng)的步進(jìn)式驅(qū)動電路:
2009-06-12 16:26:5424 鑒幅式伺服系統(tǒng)的工作原理
圖5--25是鑒幅式伺服系統(tǒng)的方框圖。該系統(tǒng)由測量元件及信號處理線路、數(shù)模轉(zhuǎn)換器、比較器、驅(qū)動環(huán)節(jié)
2009-05-06 23:52:591865 
交流伺服電機(jī)的工作原理
交流伺服電機(jī)驅(qū)動是最新發(fā)展起來的新型伺服系統(tǒng),也是當(dāng)前機(jī)床進(jìn)給驅(qū)動系統(tǒng)方面的一個(gè)新動向。該系統(tǒng)
2009-05-06 23:50:1039756 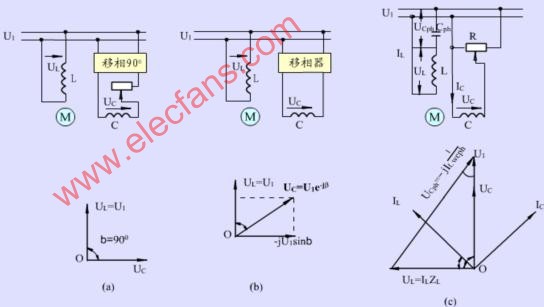
磁阻式步進(jìn)電機(jī)的工作原理
以磁阻式步進(jìn)電機(jī)為例,介紹一下步進(jìn)電機(jī)的工作原理,圖1. 1是磁阻式步進(jìn)電機(jī)工作原理的示意圖。它的定
2009-05-06 23:40:183847 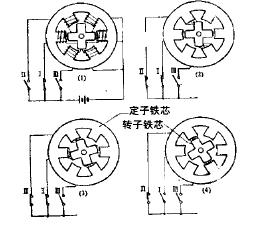
數(shù)控機(jī)床的伺服驅(qū)動系統(tǒng):
開環(huán)步進(jìn)式伺服驅(qū)動系統(tǒng) 開環(huán)步進(jìn)式伺服驅(qū)動系統(tǒng)閉環(huán)伺服控制原理與系統(tǒng) 閉環(huán)伺服控制原理與系統(tǒng)CNC CNC伺服系統(tǒng) 伺服系統(tǒng)
2009-04-30 09:30:4645 步進(jìn)電機(jī)的工作原理
以磁阻式步進(jìn)電機(jī)為例,介紹一下步進(jìn)電機(jī)的工作原理,圖1. 1是磁阻式步進(jìn)電機(jī)工作原理的示意圖。它的定子上有六個(gè)
2009-03-30 16:53:048215 
伺服閥的工作原理
圖2是伺服閥的工作原理圖。
2008-11-19 16:21:1814440 步進(jìn)電機(jī)驅(qū)動器的工作原理
步進(jìn)電機(jī)在控制系統(tǒng)中具有廣泛的應(yīng)用。它可以把脈沖信號轉(zhuǎn)換成角位移,并且可用作電磁制動輪、電磁差分器、或角位移
2008-10-21 00:35:0019191 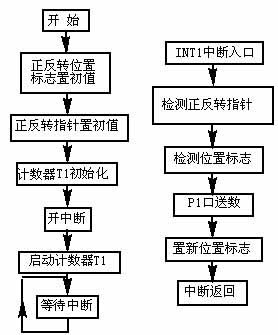
步進(jìn)電機(jī)工作原理與編程方法和控制源程序
本文介紹了步進(jìn)電機(jī)的工作原理與編程方法,以及例出
2008-05-22 09:13:48314 步進(jìn)電動機(jī)概述步進(jìn)電動機(jī)工作原理及線性解析步進(jìn)電動機(jī)的研究設(shè)計(jì)計(jì)算方法步進(jìn)電動機(jī)動態(tài)特性的基礎(chǔ)理論步進(jìn)電動機(jī)的驅(qū)動步進(jìn)電動機(jī)的環(huán)境分配器步進(jìn)電
2007-11-16 23:33:276
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論