 電子發(fā)燒友App
電子發(fā)燒友App


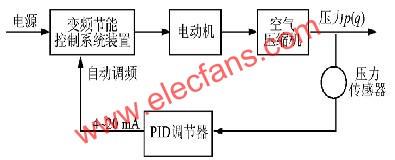
在煤礦采煤生產(chǎn)中,空氣壓縮機(jī)(簡稱:空壓機(jī))主要負(fù)責(zé)向礦井大量的風(fēng)動(dòng)機(jī)械提供動(dòng)力,其工作的可靠性和安全性直接影響著礦山的正常生產(chǎn)和經(jīng)濟(jì)效益。目前大部分空壓機(jī)組存在著控制方式落后、操作不方便的問題。控制回路大多為繼電器控制,控制方式采用就地分散式人工操作,由固定人員24小時(shí)值守,值守人員根據(jù)井下用風(fēng)量的需求手動(dòng)啟動(dòng)或者停止空壓機(jī),并且定時(shí)巡檢、記錄運(yùn)行狀況。另外,空壓機(jī)組耗電量很大,其中有相當(dāng)長時(shí)間是在空載或輕載狀態(tài)下運(yùn)行,導(dǎo)致能耗大、機(jī)器受損嚴(yán)重、運(yùn)行成本較高。因此,設(shè)計(jì)一個(gè)操作方便、功能完善的全自動(dòng)集中監(jiān)控系統(tǒng),對(duì)空壓機(jī)組進(jìn)行監(jiān)控和保護(hù),提高空壓機(jī)組的工作效率,降低能耗,延長使用壽命,有著重要的現(xiàn)實(shí)意義。
2、監(jiān)控系統(tǒng)的構(gòu)成
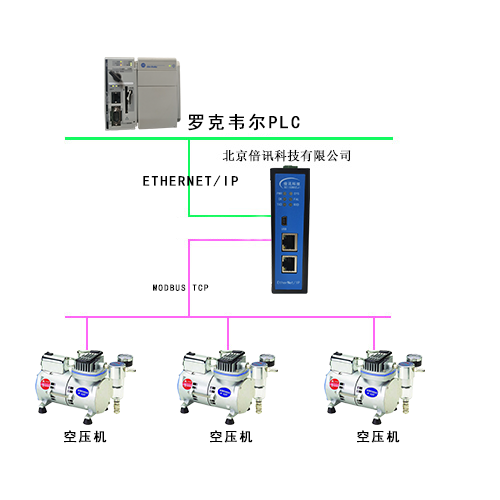
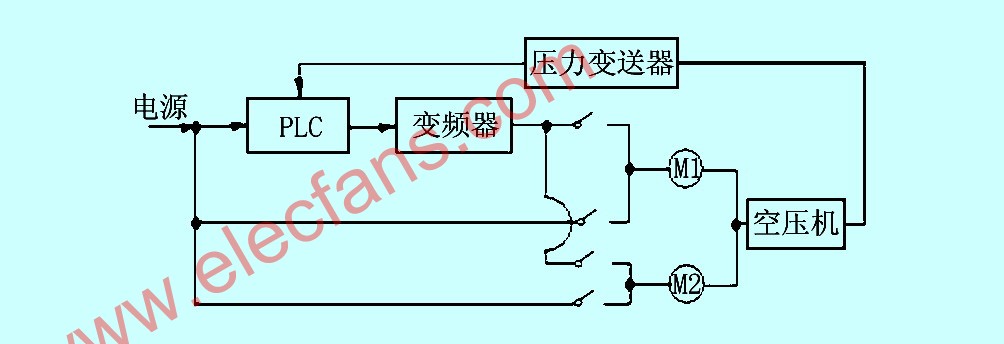
本項(xiàng)目空壓機(jī)房有五臺(tái)CompAir L250型噴油螺桿式空壓機(jī),主電機(jī)功率為250kW,供電電壓為6000V, 轉(zhuǎn)速為1485rpm,自由排氣量為42.7m3/min、最大排氣壓力為7.5×105Pa。每臺(tái)空壓機(jī)都配有本體控制器Delcos3100,通過Delcos3100控制器的操作面板,操作人員可以就地控制單臺(tái)空壓機(jī)的啟停、查看運(yùn)行狀況、設(shè)置運(yùn)行參數(shù)等。另外,Delcos3100控制器留有一個(gè)RS-485通信接口,支持Modbus RTU協(xié)議,為實(shí)現(xiàn)空壓機(jī)組的集中監(jiān)控提供了條件。系統(tǒng)結(jié)構(gòu)圖如圖1所示。
系統(tǒng)選用西門子公司的S7-300 PLC實(shí)現(xiàn)集中監(jiān)控。S7-300 PLC為模塊化結(jié)構(gòu),具有模塊齊全、擴(kuò)充方便、通信能力強(qiáng)、運(yùn)行穩(wěn)定可靠等優(yōu)點(diǎn),特別適合用于工業(yè)環(huán)境及電氣干擾環(huán)境。根據(jù)系統(tǒng)控制要求并考慮留有一定的裕量,PLC的硬件配置如下:
(1)電源模塊PS307:輸入電壓為220VAC,輸出電壓為24VDC,輸出電流為5A,向其他PLC模塊供電。
(2)CPU模塊CPU315-2DP:系統(tǒng)中信息的運(yùn)算和處理的核心,內(nèi)有48KB隨機(jī)存儲(chǔ)器和80KB裝載存儲(chǔ)器,每執(zhí)行1000條指令約需0.3ms,最大可擴(kuò)展1024點(diǎn)數(shù)字量或128個(gè)模擬量通道。它有一個(gè)MPI通訊口和一個(gè)DP通訊口,MPI口用于連接觸摸屏,DP口用作調(diào)試程序時(shí)監(jiān)視PLC程序的運(yùn)行以及下載程序;并留作將來系統(tǒng)擴(kuò)展時(shí)使用。
(3)數(shù)字量輸入模塊SM321:配置3塊型號(hào)為DI16×24VDC的SM321模塊,采集向空壓機(jī)供電的五臺(tái)高壓開關(guān)柜的狀態(tài)信號(hào)(如:高壓允許、高壓故障、合閘反饋、分閘反饋、小車就位等)、與五臺(tái)空壓機(jī)相對(duì)應(yīng)的五個(gè)手自動(dòng)轉(zhuǎn)換開關(guān)和五個(gè)緊急停止按鈕的狀態(tài)信號(hào)。
(4)數(shù)字量輸出模塊SM322:配置2塊型號(hào)為DO16×24VDC/0.5A REL的SM322模塊,輸出PLC的控制信號(hào)如啟動(dòng)、停止、加載、卸荷、急停等,控制空壓機(jī)運(yùn)行。
(5)通信模快CP341:CP341模塊是串行通訊處理器模塊,硬件接口可采用RS-232C或TTY或RS-422/485方式,集成了3964(R)、RK512、ASCII通訊協(xié)議,并且支持用戶加載協(xié)議。系統(tǒng)選用接口為RS-485標(biāo)準(zhǔn)的CP341模塊,并在CP341通訊模塊中插入Modbus主站Dongle模塊加載Modbus協(xié)議,使CP341模塊成為Modbus主站。CP341模塊利用基于RS-485總線的Modbus協(xié)議,與五個(gè)作為Modbus從站的Delcos3100控制器進(jìn)行通訊,采集Delcos3100控制器中存儲(chǔ)的空壓機(jī)運(yùn)行狀態(tài)信息。
(6)通信模快CP343-1:CP343-1是用于連接工業(yè)以太網(wǎng)的通訊處理器模塊,將PLC系統(tǒng)接入以太網(wǎng),負(fù)責(zé)PLC和上位機(jī)之間的通訊。
2.2 觸摸屏配置設(shè)計(jì)
系統(tǒng)采用西門子TP270-10型觸摸屏作為車間級(jí)的集中監(jiān)控站。它是基于標(biāo)準(zhǔn)操作系統(tǒng)Microsoft Windows CE的多功能人機(jī)交互界面,具有強(qiáng)大的數(shù)據(jù)采集和管理功能,穩(wěn)定可靠,界面友好,圖形顯示,操作和管理方便。操作人員可以通過圖形和菜單的方式查看空壓機(jī)的運(yùn)行狀態(tài)及實(shí)時(shí)數(shù)據(jù),設(shè)定空壓機(jī)的壓力、時(shí)間等運(yùn)行參數(shù),查看系統(tǒng)的歷史數(shù)據(jù)、故障報(bào)警信息,并可設(shè)置是否允許上位機(jī)遠(yuǎn)程控制空壓機(jī)。觸摸屏直觀顯示了空壓機(jī)組的運(yùn)行狀況,操作方便快捷,避免了定時(shí)巡檢記錄的煩瑣工作,大大提高了工作效率和管理水平。
2.3 上位機(jī)配置設(shè)計(jì)
系統(tǒng)采用PC機(jī)作為上位機(jī)遠(yuǎn)程監(jiān)控站。通過網(wǎng)絡(luò)在線監(jiān)視空壓機(jī)的運(yùn)行狀況,查看壓力、溫度、運(yùn)行時(shí)間、電機(jī)電壓、電機(jī)電流、輸出功率等實(shí)時(shí)數(shù)據(jù),記錄并存儲(chǔ)歷史數(shù)據(jù),提供數(shù)據(jù)的查詢和打印功能。當(dāng)現(xiàn)場設(shè)備有動(dòng)作或者出現(xiàn)故障時(shí)能夠彈出提示消息并記錄存儲(chǔ)下來;在遠(yuǎn)程控制允許的情況下,值班人員還可以遠(yuǎn)程控制空壓機(jī)。遠(yuǎn)程監(jiān)控方便了調(diào)度,提高了管理自動(dòng)化水平,是煤礦信息化發(fā)展的需要。
其他元件包括手自動(dòng)轉(zhuǎn)換開關(guān)、緊急停止按鈕、聲光報(bào)警器等。
3、通訊系統(tǒng)的構(gòu)成
系統(tǒng)中的通訊包括三個(gè)部分。
3.1 現(xiàn)場設(shè)備通訊
PLC和Delcos3100控制器之間的通訊[4]采用控制方便、設(shè)計(jì)簡單的RS-485接口標(biāo)準(zhǔn)作為物理通信標(biāo)準(zhǔn)。RS-485標(biāo)準(zhǔn)要求采用兩線制差分方式發(fā)送和接收數(shù)據(jù),因此能夠有效克服共模干擾、抑制線路噪聲。根據(jù)實(shí)際情況,通信協(xié)議采用單主站多從站結(jié)構(gòu)的Modbus協(xié)議,選用Modbus的RTU通訊模式。RS-485標(biāo)準(zhǔn)是總線的物理層標(biāo)準(zhǔn),負(fù)責(zé)完成電平轉(zhuǎn)換和數(shù)據(jù)收發(fā);Modbus協(xié)議則構(gòu)成了總線的數(shù)據(jù)鏈路層協(xié)議,規(guī)定了總線上傳輸?shù)臄?shù)據(jù)幀格式,為主站和從站之間傳遞數(shù)據(jù)提供通信規(guī)約,保證有效數(shù)據(jù)在主站和從站之間可靠傳遞,兩者共同構(gòu)成了RS-485總線。
CP341模塊設(shè)置為總線的主站,五個(gè)Delcos3100控制器設(shè)置為總線的從站,每個(gè)從站分配唯一的地址,主站和從站的通訊速率統(tǒng)一設(shè)定為76.8kbps。工作時(shí)采用命令/應(yīng)答的通訊方式,每一種命令幀都對(duì)應(yīng)著一種應(yīng)答幀,Modbus協(xié)議為命令幀定義了許多功能碼,不同的功能碼要求從站進(jìn)行不同的響應(yīng)。系統(tǒng)中用到的功能碼為0x03,即讀取Delcos3100控制器的寄存器。CP341模塊發(fā)出功能碼為0x03的命令幀,地址匹配的Delcos3100控制器就會(huì)做出響應(yīng),將存儲(chǔ)在寄存器中的空壓機(jī)運(yùn)行信息(壓力、壓差、溫度、電壓、電流、載荷狀態(tài)、運(yùn)行時(shí)間、故障信息等)組成應(yīng)答幀發(fā)出至CP341模塊。重復(fù)上述過程,CP341模塊即可實(shí)現(xiàn)輪循采集空壓機(jī)組的運(yùn)行信息。
CP341模塊下發(fā)的命令幀格式如圖2所示。
Delcos3100控制器上傳的應(yīng)答幀格式如圖3所示。
最后需要說明的是,RS-485總線僅用作數(shù)據(jù)采集,控制信號(hào)由PLC的數(shù)字量輸出模塊SM322輸出,經(jīng)過信號(hào)線傳輸?shù)娇諌簷C(jī)自身的控制繼電器,這是由現(xiàn)場的實(shí)時(shí)性要求決定的。如果控制信號(hào)也由CP341模塊發(fā)出,就需要經(jīng)過RS-485總線傳輸?shù)紻elcos3100控制器,再由Delcos3100控制器控制空壓機(jī)的控制繼電器;而采用硬接線的方式直接傳送控制信號(hào)到空壓機(jī)的控制繼電器,就大大縮短了系統(tǒng)的控制響應(yīng)時(shí)間;同時(shí),RS-485總線能夠以更快的速度采集實(shí)時(shí)數(shù)據(jù)。
3.2 觸摸屏通訊
PLC和觸摸屏之間的通訊二者均為西門子的產(chǎn)品,通過MPI電纜連接PLC的MPI通信口和觸摸屏的RS-485通信口.組態(tài)時(shí)對(duì)相關(guān)通訊參數(shù)如所要連接CPU的MPI地址和槽號(hào)等進(jìn)行定義,選擇接口類型為MPI,將波特率設(shè)置為187.5kbps進(jìn)行簡單的組態(tài)操作即可實(shí)現(xiàn)通訊。
3.3 上位機(jī)通訊
在PLC和上位機(jī)之間的通訊中,PLC通過以太網(wǎng)模塊CP343-1接入工業(yè)以太網(wǎng),上位機(jī)通過網(wǎng)絡(luò)實(shí)現(xiàn)遠(yuǎn)程監(jiān)控功能。選擇接口類型為工業(yè)Ethernet,通信速率為100Mbps,設(shè)置PLC和上位機(jī)的IP地址。
4、軟件設(shè)計(jì)
系統(tǒng)的控制要求如下:手自動(dòng)轉(zhuǎn)換開關(guān)為手動(dòng)狀態(tài)的空壓機(jī),僅受其Delcos3100控制器控制,以方便機(jī)器檢修和維護(hù),此時(shí)PLC只能采集該Delcos3100控制器中的數(shù)據(jù)而不能控制空壓機(jī);手自動(dòng)轉(zhuǎn)換開關(guān)為自動(dòng)狀態(tài)且遠(yuǎn)程控制無效的空壓機(jī),將由PLC進(jìn)行集中監(jiān)制,PLC根據(jù)風(fēng)壓的變化來決定投入運(yùn)行的空壓機(jī)臺(tái)數(shù),維持風(fēng)壓能夠滿足井下用風(fēng)的需要,并且依據(jù)空壓機(jī)運(yùn)行時(shí)間的長短使它們輪換工作;當(dāng)觸摸屏上的遠(yuǎn)程控制設(shè)置無效時(shí),上位機(jī)只能監(jiān)測到空壓機(jī)的運(yùn)行狀況而沒有控制權(quán)限,當(dāng)遠(yuǎn)程控制有效且手自動(dòng)轉(zhuǎn)換開關(guān)為自動(dòng)狀態(tài)時(shí),空壓機(jī)將只受上位機(jī)遠(yuǎn)程控制。
4.1 PLC監(jiān)控程序設(shè)計(jì)
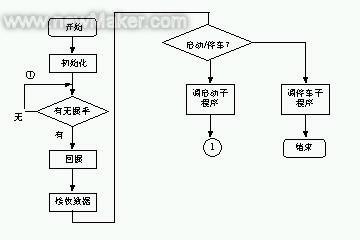
開發(fā)環(huán)境為SIMATIC STEP7 V5.3 SP2編程軟件包,它采用結(jié)構(gòu)化程序設(shè)計(jì),程序可讀性強(qiáng),調(diào)試和維護(hù)方便。單臺(tái)空壓機(jī)的主程序流程圖如圖4所示。
(1)自動(dòng)輪換運(yùn)行。PLC根據(jù)總線采集的信號(hào)進(jìn)行綜合判斷,然后發(fā)出啟動(dòng)、停機(jī)、加載、卸荷、報(bào)警等控制指令,監(jiān)控空壓機(jī)組自動(dòng)運(yùn)行,使得總管壓力維持在設(shè)定的壓力下限值和壓力上限值之間。若風(fēng)壓低于壓力下限值就增加空壓機(jī)運(yùn)行的臺(tái)數(shù),若風(fēng)壓高于壓力上限值則減少空壓機(jī)運(yùn)行的臺(tái)數(shù),達(dá)到既滿足井下用風(fēng)需要、又可以降耗節(jié)能的目的。
空壓機(jī)連續(xù)運(yùn)行8小時(shí)后機(jī)身溫度會(huì)很高,需要停機(jī)休息,用于散發(fā)自身的熱量,以保證機(jī)器不受損傷。因此,空壓機(jī)需要進(jìn)行輪換工作,以保證空壓機(jī)安全可靠運(yùn)行,延長設(shè)備使用壽命。PLC根據(jù)運(yùn)行時(shí)間將受控于PLC的空壓機(jī)進(jìn)行排序,建立開機(jī)序列和停機(jī)序列,當(dāng)需要增加空壓機(jī)的運(yùn)行臺(tái)數(shù)時(shí),PLC將啟動(dòng)總運(yùn)行時(shí)間最短的空壓機(jī);當(dāng)需要減少空壓機(jī)的運(yùn)行臺(tái)數(shù)時(shí),PLC將停止本次運(yùn)行時(shí)間最長的空壓機(jī)。
(2)延時(shí)啟動(dòng)和延時(shí)停機(jī)。PLC自身具有較強(qiáng)的抗干擾能力,但由于現(xiàn)場條件、電網(wǎng)、用風(fēng)量等各種復(fù)雜因素的影響,電機(jī)電流、電機(jī)電壓等受到干擾將產(chǎn)生誤報(bào)警;如果總管壓力的擾動(dòng)發(fā)生在壓力下限值或者壓力上限值附近,將它們作為一般工狀處理就會(huì)出現(xiàn)頻繁啟動(dòng)、停機(jī)現(xiàn)象,影響設(shè)備的可靠性和使用壽命。因此,需要對(duì)發(fā)出動(dòng)作指令的起因信號(hào)作適當(dāng)?shù)难訒r(shí)處理,以消除擾動(dòng),防止誤動(dòng)作。
(3)智能保護(hù)。空壓機(jī)主電機(jī)在啟動(dòng)時(shí),啟動(dòng)電流為額定電流的5~7倍,對(duì)電網(wǎng)和其他用電設(shè)備沖擊很大,同時(shí)也會(huì)影響空壓機(jī)的使用壽命,所以,空壓機(jī)不宜頻繁啟動(dòng)。為了使系統(tǒng)能夠?qū)τ蔑L(fēng)狀況進(jìn)行準(zhǔn)確判斷,并據(jù)此控制空壓機(jī)的啟動(dòng),在井下用風(fēng)高峰期空壓機(jī)啟動(dòng)較頻繁,當(dāng)兩次啟動(dòng)時(shí)間間隔小于預(yù)先設(shè)定的值時(shí),將保持空壓機(jī)持續(xù)運(yùn)轉(zhuǎn)而不停機(jī),當(dāng)連續(xù)兩次加載間隔時(shí)間較長時(shí),可認(rèn)為用風(fēng)高峰期已過,空壓機(jī)投入間斷運(yùn)行狀態(tài)。另外,對(duì)電機(jī)電流、電機(jī)電壓、排氣壓力、進(jìn)氣負(fù)壓、運(yùn)行溫度、油溫、油濾壓差等重要參數(shù)進(jìn)行實(shí)時(shí)監(jiān)控,出現(xiàn)異常及時(shí)進(jìn)行故障報(bào)警,并作出處理。
4.2 觸摸屏人機(jī)界面設(shè)計(jì)
選用與觸摸屏TP270配套的組態(tài)軟件Protool/pro設(shè)計(jì)界面。畫面包括:(1)主畫面:空壓機(jī)組的運(yùn)行狀態(tài)以及主要參數(shù)的顯示。(2)數(shù)據(jù)報(bào)表:實(shí)時(shí)數(shù)據(jù)匯總顯示,并可查詢歷史數(shù)據(jù)和總管壓力曲線。(3)運(yùn)行設(shè)置:設(shè)置啟動(dòng)遠(yuǎn)程控制是否有效;設(shè)置自動(dòng)啟動(dòng)、停機(jī)、加載、卸荷的壓力閾值;設(shè)置時(shí)間參數(shù)、報(bào)警參數(shù)等。(4)報(bào)警查詢:查詢報(bào)警詳細(xì)信息。(5)系統(tǒng)管理。
4.3 上位機(jī)監(jiān)控程序設(shè)計(jì)
上位機(jī)監(jiān)控軟件選用西門子公司基于Windows環(huán)境的組態(tài)軟件WinCC6.0版。主要由監(jiān)控畫面、實(shí)時(shí)報(bào)表、歷史數(shù)據(jù)、報(bào)警查詢、遠(yuǎn)程控制和系統(tǒng)管理界面組成,監(jiān)控畫面如圖5所示。
S7-300 PLC具有較高的性價(jià)比,但與現(xiàn)場設(shè)備支持的通信協(xié)議不兼容,系統(tǒng)采用CP341模塊作為Modbus主站的方案具有一定的實(shí)際意義。現(xiàn)場調(diào)試和運(yùn)行表明,該系統(tǒng)運(yùn)行穩(wěn)定,安全可靠,提高了空壓機(jī)組的運(yùn)行效率,實(shí)現(xiàn)了監(jiān)控和管理的自動(dòng)化。該系統(tǒng)不僅可以應(yīng)用于煤礦的空壓機(jī)組監(jiān)控,而且可以推廣到其他場合。
2、監(jiān)控系統(tǒng)的構(gòu)成
本項(xiàng)目空壓機(jī)房有五臺(tái)CompAir L250型噴油螺桿式空壓機(jī),主電機(jī)功率為250kW,供電電壓為6000V, 轉(zhuǎn)速為1485rpm,自由排氣量為42.7m3/min、最大排氣壓力為7.5×105Pa。每臺(tái)空壓機(jī)都配有本體控制器Delcos3100,通過Delcos3100控制器的操作面板,操作人員可以就地控制單臺(tái)空壓機(jī)的啟停、查看運(yùn)行狀況、設(shè)置運(yùn)行參數(shù)等。另外,Delcos3100控制器留有一個(gè)RS-485通信接口,支持Modbus RTU協(xié)議,為實(shí)現(xiàn)空壓機(jī)組的集中監(jiān)控提供了條件。系統(tǒng)結(jié)構(gòu)圖如圖1所示。

圖1 系統(tǒng)結(jié)構(gòu)圖
系統(tǒng)選用西門子公司的S7-300 PLC實(shí)現(xiàn)集中監(jiān)控。S7-300 PLC為模塊化結(jié)構(gòu),具有模塊齊全、擴(kuò)充方便、通信能力強(qiáng)、運(yùn)行穩(wěn)定可靠等優(yōu)點(diǎn),特別適合用于工業(yè)環(huán)境及電氣干擾環(huán)境。根據(jù)系統(tǒng)控制要求并考慮留有一定的裕量,PLC的硬件配置如下:
(1)電源模塊PS307:輸入電壓為220VAC,輸出電壓為24VDC,輸出電流為5A,向其他PLC模塊供電。
(2)CPU模塊CPU315-2DP:系統(tǒng)中信息的運(yùn)算和處理的核心,內(nèi)有48KB隨機(jī)存儲(chǔ)器和80KB裝載存儲(chǔ)器,每執(zhí)行1000條指令約需0.3ms,最大可擴(kuò)展1024點(diǎn)數(shù)字量或128個(gè)模擬量通道。它有一個(gè)MPI通訊口和一個(gè)DP通訊口,MPI口用于連接觸摸屏,DP口用作調(diào)試程序時(shí)監(jiān)視PLC程序的運(yùn)行以及下載程序;并留作將來系統(tǒng)擴(kuò)展時(shí)使用。
(3)數(shù)字量輸入模塊SM321:配置3塊型號(hào)為DI16×24VDC的SM321模塊,采集向空壓機(jī)供電的五臺(tái)高壓開關(guān)柜的狀態(tài)信號(hào)(如:高壓允許、高壓故障、合閘反饋、分閘反饋、小車就位等)、與五臺(tái)空壓機(jī)相對(duì)應(yīng)的五個(gè)手自動(dòng)轉(zhuǎn)換開關(guān)和五個(gè)緊急停止按鈕的狀態(tài)信號(hào)。
(4)數(shù)字量輸出模塊SM322:配置2塊型號(hào)為DO16×24VDC/0.5A REL的SM322模塊,輸出PLC的控制信號(hào)如啟動(dòng)、停止、加載、卸荷、急停等,控制空壓機(jī)運(yùn)行。
(5)通信模快CP341:CP341模塊是串行通訊處理器模塊,硬件接口可采用RS-232C或TTY或RS-422/485方式,集成了3964(R)、RK512、ASCII通訊協(xié)議,并且支持用戶加載協(xié)議。系統(tǒng)選用接口為RS-485標(biāo)準(zhǔn)的CP341模塊,并在CP341通訊模塊中插入Modbus主站Dongle模塊加載Modbus協(xié)議,使CP341模塊成為Modbus主站。CP341模塊利用基于RS-485總線的Modbus協(xié)議,與五個(gè)作為Modbus從站的Delcos3100控制器進(jìn)行通訊,采集Delcos3100控制器中存儲(chǔ)的空壓機(jī)運(yùn)行狀態(tài)信息。
(6)通信模快CP343-1:CP343-1是用于連接工業(yè)以太網(wǎng)的通訊處理器模塊,將PLC系統(tǒng)接入以太網(wǎng),負(fù)責(zé)PLC和上位機(jī)之間的通訊。
2.2 觸摸屏配置設(shè)計(jì)
系統(tǒng)采用西門子TP270-10型觸摸屏作為車間級(jí)的集中監(jiān)控站。它是基于標(biāo)準(zhǔn)操作系統(tǒng)Microsoft Windows CE的多功能人機(jī)交互界面,具有強(qiáng)大的數(shù)據(jù)采集和管理功能,穩(wěn)定可靠,界面友好,圖形顯示,操作和管理方便。操作人員可以通過圖形和菜單的方式查看空壓機(jī)的運(yùn)行狀態(tài)及實(shí)時(shí)數(shù)據(jù),設(shè)定空壓機(jī)的壓力、時(shí)間等運(yùn)行參數(shù),查看系統(tǒng)的歷史數(shù)據(jù)、故障報(bào)警信息,并可設(shè)置是否允許上位機(jī)遠(yuǎn)程控制空壓機(jī)。觸摸屏直觀顯示了空壓機(jī)組的運(yùn)行狀況,操作方便快捷,避免了定時(shí)巡檢記錄的煩瑣工作,大大提高了工作效率和管理水平。
2.3 上位機(jī)配置設(shè)計(jì)
系統(tǒng)采用PC機(jī)作為上位機(jī)遠(yuǎn)程監(jiān)控站。通過網(wǎng)絡(luò)在線監(jiān)視空壓機(jī)的運(yùn)行狀況,查看壓力、溫度、運(yùn)行時(shí)間、電機(jī)電壓、電機(jī)電流、輸出功率等實(shí)時(shí)數(shù)據(jù),記錄并存儲(chǔ)歷史數(shù)據(jù),提供數(shù)據(jù)的查詢和打印功能。當(dāng)現(xiàn)場設(shè)備有動(dòng)作或者出現(xiàn)故障時(shí)能夠彈出提示消息并記錄存儲(chǔ)下來;在遠(yuǎn)程控制允許的情況下,值班人員還可以遠(yuǎn)程控制空壓機(jī)。遠(yuǎn)程監(jiān)控方便了調(diào)度,提高了管理自動(dòng)化水平,是煤礦信息化發(fā)展的需要。
其他元件包括手自動(dòng)轉(zhuǎn)換開關(guān)、緊急停止按鈕、聲光報(bào)警器等。
3、通訊系統(tǒng)的構(gòu)成
系統(tǒng)中的通訊包括三個(gè)部分。
3.1 現(xiàn)場設(shè)備通訊
PLC和Delcos3100控制器之間的通訊[4]采用控制方便、設(shè)計(jì)簡單的RS-485接口標(biāo)準(zhǔn)作為物理通信標(biāo)準(zhǔn)。RS-485標(biāo)準(zhǔn)要求采用兩線制差分方式發(fā)送和接收數(shù)據(jù),因此能夠有效克服共模干擾、抑制線路噪聲。根據(jù)實(shí)際情況,通信協(xié)議采用單主站多從站結(jié)構(gòu)的Modbus協(xié)議,選用Modbus的RTU通訊模式。RS-485標(biāo)準(zhǔn)是總線的物理層標(biāo)準(zhǔn),負(fù)責(zé)完成電平轉(zhuǎn)換和數(shù)據(jù)收發(fā);Modbus協(xié)議則構(gòu)成了總線的數(shù)據(jù)鏈路層協(xié)議,規(guī)定了總線上傳輸?shù)臄?shù)據(jù)幀格式,為主站和從站之間傳遞數(shù)據(jù)提供通信規(guī)約,保證有效數(shù)據(jù)在主站和從站之間可靠傳遞,兩者共同構(gòu)成了RS-485總線。
CP341模塊設(shè)置為總線的主站,五個(gè)Delcos3100控制器設(shè)置為總線的從站,每個(gè)從站分配唯一的地址,主站和從站的通訊速率統(tǒng)一設(shè)定為76.8kbps。工作時(shí)采用命令/應(yīng)答的通訊方式,每一種命令幀都對(duì)應(yīng)著一種應(yīng)答幀,Modbus協(xié)議為命令幀定義了許多功能碼,不同的功能碼要求從站進(jìn)行不同的響應(yīng)。系統(tǒng)中用到的功能碼為0x03,即讀取Delcos3100控制器的寄存器。CP341模塊發(fā)出功能碼為0x03的命令幀,地址匹配的Delcos3100控制器就會(huì)做出響應(yīng),將存儲(chǔ)在寄存器中的空壓機(jī)運(yùn)行信息(壓力、壓差、溫度、電壓、電流、載荷狀態(tài)、運(yùn)行時(shí)間、故障信息等)組成應(yīng)答幀發(fā)出至CP341模塊。重復(fù)上述過程,CP341模塊即可實(shí)現(xiàn)輪循采集空壓機(jī)組的運(yùn)行信息。
CP341模塊下發(fā)的命令幀格式如圖2所示。

圖2 命令幀格式
Delcos3100控制器上傳的應(yīng)答幀格式如圖3所示。

圖3 應(yīng)答幀格式
最后需要說明的是,RS-485總線僅用作數(shù)據(jù)采集,控制信號(hào)由PLC的數(shù)字量輸出模塊SM322輸出,經(jīng)過信號(hào)線傳輸?shù)娇諌簷C(jī)自身的控制繼電器,這是由現(xiàn)場的實(shí)時(shí)性要求決定的。如果控制信號(hào)也由CP341模塊發(fā)出,就需要經(jīng)過RS-485總線傳輸?shù)紻elcos3100控制器,再由Delcos3100控制器控制空壓機(jī)的控制繼電器;而采用硬接線的方式直接傳送控制信號(hào)到空壓機(jī)的控制繼電器,就大大縮短了系統(tǒng)的控制響應(yīng)時(shí)間;同時(shí),RS-485總線能夠以更快的速度采集實(shí)時(shí)數(shù)據(jù)。
3.2 觸摸屏通訊
PLC和觸摸屏之間的通訊二者均為西門子的產(chǎn)品,通過MPI電纜連接PLC的MPI通信口和觸摸屏的RS-485通信口.組態(tài)時(shí)對(duì)相關(guān)通訊參數(shù)如所要連接CPU的MPI地址和槽號(hào)等進(jìn)行定義,選擇接口類型為MPI,將波特率設(shè)置為187.5kbps進(jìn)行簡單的組態(tài)操作即可實(shí)現(xiàn)通訊。
3.3 上位機(jī)通訊
在PLC和上位機(jī)之間的通訊中,PLC通過以太網(wǎng)模塊CP343-1接入工業(yè)以太網(wǎng),上位機(jī)通過網(wǎng)絡(luò)實(shí)現(xiàn)遠(yuǎn)程監(jiān)控功能。選擇接口類型為工業(yè)Ethernet,通信速率為100Mbps,設(shè)置PLC和上位機(jī)的IP地址。
4、軟件設(shè)計(jì)
系統(tǒng)的控制要求如下:手自動(dòng)轉(zhuǎn)換開關(guān)為手動(dòng)狀態(tài)的空壓機(jī),僅受其Delcos3100控制器控制,以方便機(jī)器檢修和維護(hù),此時(shí)PLC只能采集該Delcos3100控制器中的數(shù)據(jù)而不能控制空壓機(jī);手自動(dòng)轉(zhuǎn)換開關(guān)為自動(dòng)狀態(tài)且遠(yuǎn)程控制無效的空壓機(jī),將由PLC進(jìn)行集中監(jiān)制,PLC根據(jù)風(fēng)壓的變化來決定投入運(yùn)行的空壓機(jī)臺(tái)數(shù),維持風(fēng)壓能夠滿足井下用風(fēng)的需要,并且依據(jù)空壓機(jī)運(yùn)行時(shí)間的長短使它們輪換工作;當(dāng)觸摸屏上的遠(yuǎn)程控制設(shè)置無效時(shí),上位機(jī)只能監(jiān)測到空壓機(jī)的運(yùn)行狀況而沒有控制權(quán)限,當(dāng)遠(yuǎn)程控制有效且手自動(dòng)轉(zhuǎn)換開關(guān)為自動(dòng)狀態(tài)時(shí),空壓機(jī)將只受上位機(jī)遠(yuǎn)程控制。
4.1 PLC監(jiān)控程序設(shè)計(jì)
開發(fā)環(huán)境為SIMATIC STEP7 V5.3 SP2編程軟件包,它采用結(jié)構(gòu)化程序設(shè)計(jì),程序可讀性強(qiáng),調(diào)試和維護(hù)方便。單臺(tái)空壓機(jī)的主程序流程圖如圖4所示。

圖4 主程序流程圖
(1)自動(dòng)輪換運(yùn)行。PLC根據(jù)總線采集的信號(hào)進(jìn)行綜合判斷,然后發(fā)出啟動(dòng)、停機(jī)、加載、卸荷、報(bào)警等控制指令,監(jiān)控空壓機(jī)組自動(dòng)運(yùn)行,使得總管壓力維持在設(shè)定的壓力下限值和壓力上限值之間。若風(fēng)壓低于壓力下限值就增加空壓機(jī)運(yùn)行的臺(tái)數(shù),若風(fēng)壓高于壓力上限值則減少空壓機(jī)運(yùn)行的臺(tái)數(shù),達(dá)到既滿足井下用風(fēng)需要、又可以降耗節(jié)能的目的。
空壓機(jī)連續(xù)運(yùn)行8小時(shí)后機(jī)身溫度會(huì)很高,需要停機(jī)休息,用于散發(fā)自身的熱量,以保證機(jī)器不受損傷。因此,空壓機(jī)需要進(jìn)行輪換工作,以保證空壓機(jī)安全可靠運(yùn)行,延長設(shè)備使用壽命。PLC根據(jù)運(yùn)行時(shí)間將受控于PLC的空壓機(jī)進(jìn)行排序,建立開機(jī)序列和停機(jī)序列,當(dāng)需要增加空壓機(jī)的運(yùn)行臺(tái)數(shù)時(shí),PLC將啟動(dòng)總運(yùn)行時(shí)間最短的空壓機(jī);當(dāng)需要減少空壓機(jī)的運(yùn)行臺(tái)數(shù)時(shí),PLC將停止本次運(yùn)行時(shí)間最長的空壓機(jī)。
(2)延時(shí)啟動(dòng)和延時(shí)停機(jī)。PLC自身具有較強(qiáng)的抗干擾能力,但由于現(xiàn)場條件、電網(wǎng)、用風(fēng)量等各種復(fù)雜因素的影響,電機(jī)電流、電機(jī)電壓等受到干擾將產(chǎn)生誤報(bào)警;如果總管壓力的擾動(dòng)發(fā)生在壓力下限值或者壓力上限值附近,將它們作為一般工狀處理就會(huì)出現(xiàn)頻繁啟動(dòng)、停機(jī)現(xiàn)象,影響設(shè)備的可靠性和使用壽命。因此,需要對(duì)發(fā)出動(dòng)作指令的起因信號(hào)作適當(dāng)?shù)难訒r(shí)處理,以消除擾動(dòng),防止誤動(dòng)作。
(3)智能保護(hù)。空壓機(jī)主電機(jī)在啟動(dòng)時(shí),啟動(dòng)電流為額定電流的5~7倍,對(duì)電網(wǎng)和其他用電設(shè)備沖擊很大,同時(shí)也會(huì)影響空壓機(jī)的使用壽命,所以,空壓機(jī)不宜頻繁啟動(dòng)。為了使系統(tǒng)能夠?qū)τ蔑L(fēng)狀況進(jìn)行準(zhǔn)確判斷,并據(jù)此控制空壓機(jī)的啟動(dòng),在井下用風(fēng)高峰期空壓機(jī)啟動(dòng)較頻繁,當(dāng)兩次啟動(dòng)時(shí)間間隔小于預(yù)先設(shè)定的值時(shí),將保持空壓機(jī)持續(xù)運(yùn)轉(zhuǎn)而不停機(jī),當(dāng)連續(xù)兩次加載間隔時(shí)間較長時(shí),可認(rèn)為用風(fēng)高峰期已過,空壓機(jī)投入間斷運(yùn)行狀態(tài)。另外,對(duì)電機(jī)電流、電機(jī)電壓、排氣壓力、進(jìn)氣負(fù)壓、運(yùn)行溫度、油溫、油濾壓差等重要參數(shù)進(jìn)行實(shí)時(shí)監(jiān)控,出現(xiàn)異常及時(shí)進(jìn)行故障報(bào)警,并作出處理。
4.2 觸摸屏人機(jī)界面設(shè)計(jì)
選用與觸摸屏TP270配套的組態(tài)軟件Protool/pro設(shè)計(jì)界面。畫面包括:(1)主畫面:空壓機(jī)組的運(yùn)行狀態(tài)以及主要參數(shù)的顯示。(2)數(shù)據(jù)報(bào)表:實(shí)時(shí)數(shù)據(jù)匯總顯示,并可查詢歷史數(shù)據(jù)和總管壓力曲線。(3)運(yùn)行設(shè)置:設(shè)置啟動(dòng)遠(yuǎn)程控制是否有效;設(shè)置自動(dòng)啟動(dòng)、停機(jī)、加載、卸荷的壓力閾值;設(shè)置時(shí)間參數(shù)、報(bào)警參數(shù)等。(4)報(bào)警查詢:查詢報(bào)警詳細(xì)信息。(5)系統(tǒng)管理。
4.3 上位機(jī)監(jiān)控程序設(shè)計(jì)
上位機(jī)監(jiān)控軟件選用西門子公司基于Windows環(huán)境的組態(tài)軟件WinCC6.0版。主要由監(jiān)控畫面、實(shí)時(shí)報(bào)表、歷史數(shù)據(jù)、報(bào)警查詢、遠(yuǎn)程控制和系統(tǒng)管理界面組成,監(jiān)控畫面如圖5所示。
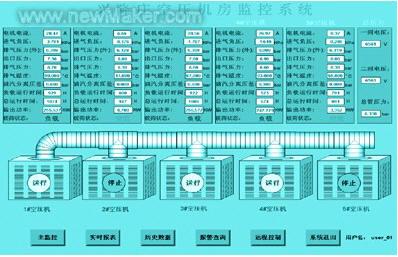
圖5 監(jiān)控畫面
S7-300 PLC具有較高的性價(jià)比,但與現(xiàn)場設(shè)備支持的通信協(xié)議不兼容,系統(tǒng)采用CP341模塊作為Modbus主站的方案具有一定的實(shí)際意義。現(xiàn)場調(diào)試和運(yùn)行表明,該系統(tǒng)運(yùn)行穩(wěn)定,安全可靠,提高了空壓機(jī)組的運(yùn)行效率,實(shí)現(xiàn)了監(jiān)控和管理的自動(dòng)化。該系統(tǒng)不僅可以應(yīng)用于煤礦的空壓機(jī)組監(jiān)控,而且可以推廣到其他場合。


















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論