本論文根據機械手控制應用,設計了一套基于PLC基于PLC控制機械手控制設計。PL與數控技術、工業機器人并為工業自動化三大支柱,PLC既保留了原來可編程序邏輯控制器的所有優點,又吸收和發展了其他
2023-07-18 15:31:17 0
0 電子發燒友網站提供《如何制作無線/手勢控制機械手.zip》資料免費下載
2023-07-10 15:04:421 平面關節型機械手設
2023-05-29 11:11:330 大家好,今天小阿暢為大家帶來的是三菱PLC控制機械手的一個實例,快來一起看看吧!
2023-04-20 10:04:40 1543
1543 一、系統控制要求 簡易機械手的結構如圖5-9所示。M1為控制機械手左右移動的電動機,M2為控制機械手上下升降的電動機,YV線圈用來控制機械手夾緊、放松,SQ1為左到位檢測開關,SQ2為右到位檢測開關
2022-12-05 13:47:0017716 電子發燒友網站提供《手勢控制機械手開源分享.zip》資料免費下載
2022-11-11 15:14:330 電子發燒友網站提供《使用EMG的機械手控制.zip》資料免費下載
2022-11-07 11:02:501 朗宇芯采用C30桁架機械手控制系統(示教器+專用總線控制器)方案:如下圖,可實現針對三軸機械手的運動控制以實現加工取物,滿足高精度作業需求,該方案具有高效率、低成本、擴展性強、操作便捷等優勢:
2022-11-04 10:50:20609 的控制系統裝置來完成,在這核心產業領域,以朗宇芯機械手控制系統為例,其保持著較高的市場占有率,系統整體在穩定性、效率、節拍等指標上可以滿足先進工藝需求,在性能上做到精益求精
2022-10-10 15:52:06773 三菱PLC(可編程邏輯控制器)編程實例項目例程-機械手
2022-05-16 17:52:2745 三菱PLC(可編程邏輯控制器)編程實例項目例程-機械手
2022-03-22 16:14:5236 三菱PLC(可編程邏輯控制器)編程實例項目例程-輸送機機械手。一個流水線的程式,檢測到24個工件,機械手動作一次,把工件搬開,動作2秒。可供初學者學習。
2022-03-22 15:11:0927 本文系統設計由開發者針對目前的一些上肢肢體不健全、自主進食有困難的特殊群體,所提出的一款輔助進食的服務型桌面機械手控制系統,以語音、機器視覺等傳感器技術為機器人提供人機交互的接口以及系統的反饋接口
2022-02-18 10:09:44215 
機械手plc
2012-05-28 16:07:10
手動機械手程序資料
2021-12-08 09:20:422 基于壓力反饋控制的車間機械手智能防撞監測系統
2021-07-01 15:50:326 為了展示“基于FPGA的AI,機器視覺,運動控制”,Enclustra打造了機械手和人互動玩石頭剪刀布的demo。
2021-05-17 17:03:341691 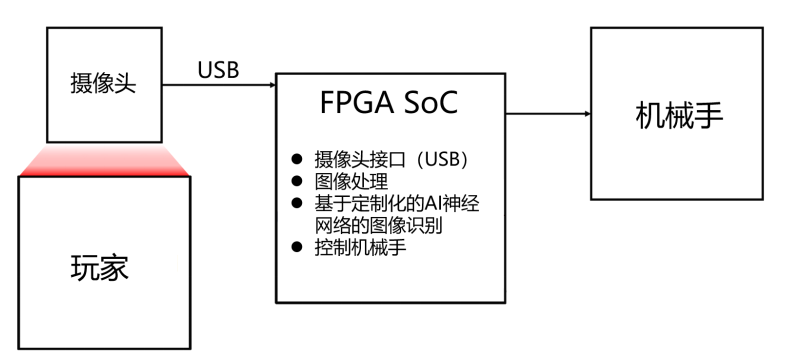
本文以某物流控制中的機械手控制為例,分析了PLC與步進驅動裝置的控制方法,本系統涉及的主要硬件是s7-200plc和sh-2h057步進驅動器。
2020-10-21 16:02:191647 
本文設計并實現了基于機器視覺的機械手裝配系統,可在線完成對不同型號和任意擺放工件的裝配任務。系統主要由機器視覺系統和機械手裝配系統組成。
2020-06-23 10:21:003216 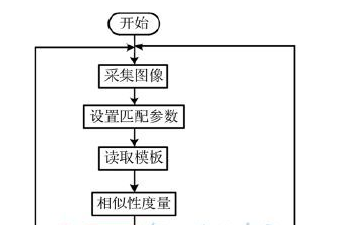
物料搬運機械手由機械手和物料分揀兩部分裝置組成。如圖1所示,機械手主要由機座(采用步進電機驅動旋轉)、水平手臂(采用直線坐標氣缸HMP-20-200)、垂直手臂(采用滑塊氣缸SLT-16-50)、氣
2020-05-17 10:10:001480 ,也必須基于網絡。在水下或者惡劣環境作業的機械手,在特定的時候需要遠程控制。網絡遠程控制機械手進行作業成為了可能。
2020-04-25 09:43:044581 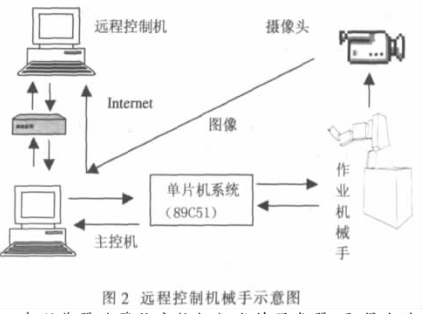
當按下啟動按鈕X1后,機械手先向下移動再向上移動,然后向右移動再向右下移動,再向右上移動,再回到原點。(我們可以想像成一個機械手抓持著一個工件,把工件從一個位置移動到另一個位置)。
2020-03-17 09:38:264568 本文介紹了基于可編程序控制器的六關節機械手示教控制系統的主要結構與控制方法 。 該控制系統可在示教模式下完成對機械手四點以內的示教操作,并能在自動復現模式下再現示教的內容 。 經 實 踐 證 明,本示教系統控制精度高、可 靠、性價 比 高、程 序 簡 捷、修 改 方 便,實 時 性 好。
2019-08-19 08:00:005 介紹一種生產線搬運機械手電氣控制系統,以PLC為核心進行系統的硬件開發和軟件設計。闡述機械手的結構、工作原理,合理選取系統硬件,詳細設計步進驅動控制程序和HMI監控系統,實現搬運機械手夾放、定位和監控等功能。
2019-05-13 08:00:007 首先講一下在工業應用中,手和眼(攝像機)的兩種位置關系,第一種是將攝像機(眼)固定在機械手(手)上面,眼隨手移動;第二種是攝像機(眼)和機械手(手)分離,眼的位置相對于手是固定的
2019-05-07 16:18:106263 本文檔的主要內容詳細介紹的是機械手的詳細資料合集十二個文檔免費下載包括了:機械手PLC控制系統的設計,機械手的結構尺寸與夾持誤差計算,基于PLC控制的氣動機械手實驗裝置的研制,基于機械手的全氣動或
2019-04-22 08:00:0027 山東康道智能資訊:數控機床機械手控制系統解說,山東康道智能的數控機床機器人機械手采用的是自主研發的控制系統。一、數控機床機械手控制系統解說數控機床機器人的全部動作都在操控系統的指揮下來進行的,特別是
2019-01-11 15:31:15786 過程中這個組成部分,是由手在軀干提供的動力和穩定之下,通過數控機床機械手臂的引來開完成工件的抓取和運送工作的。控制系統:它的功能是控制機器的驅動系統、傳動系統、執行機構,將運動分配給各執行機構,使它們
2018-12-05 15:04:311303 今天,小編給大家介紹一個西門子PLC入門級應用實例,簡易機械手的控制。
2018-09-20 17:04:2613376 機械手的工作方式分為手動或自動狀態。手動由本工作站的控制按鈕控制,自動采用串行通信接收上位機命令,并控制本位的機械手動作。若起動后機械手沒有在初始位置,則機械手應先回到初始位置,系統初始化見圖6所示。隨后,系統接受指令,按照指令要求運行,程序流程見圖7所示。
2018-08-10 17:03:403679 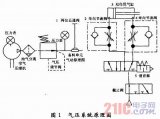
觀看采用Flexis AC 32位微控制器的機械手如何在曲棍球游戲中戰勝人類對手
2018-06-19 14:31:002699 基于S7200PLC村機械于的運動進行一系列控制,這些運動包括手臂上下、左右直線運動,手腕旋轉運動,手爪夾緊動作和機械手整體旋轉運動等。所采用的動力機構是步進電機,能夠做到精確控制。在多個行程開關傳感器的保護下,保證了這些運動萬無一失。
2018-04-30 10:19:008134 
1.機械手要將工件從工位A移到工位B處;2.機械手的初始狀態(原點條件)是機械手應停在工位A的上方,SQ1、SQ3均閉合;
2018-04-23 11:22:5916071 
、使用安全、維護方便、靈活性強,適用于倉儲行業和零件加T車間的物料搬運、自動生產線上的裝配定位等應用場合。 針對氣動平衡助力機械手負載端力臂不斷變化的隨位平衡問題,提出通過反饋控制實現機械手隨位平衡方法。在采集
2018-02-28 14:08:202 隨著計算機控制技術、無線傳感器技術及果蔬采摘設備的日益結合與發展更新,農業果蔬的采摘機器人機械手避障系統的研究更為深入具體,更適應實際場合果蔬采摘。為此,從無線傳感器應用技術角度入手,針對機械手在
2018-02-09 16:40:560 基于PLC的機床上料機械手由行車卡爪、連接分度盤及機械手卡爪組成。其控制系統設計選用基于PLC的自動化控制系統。基于PLC的機床上料機械手首要功能便是裝載,裝載過程如下:行車行進過程中定位,行車卡爪
2018-02-06 17:38:048 機械手設計必看
2018-02-01 15:14:5472 東芝機械手手動控制示教操作
2017-10-20 10:23:527 手持器操作界面,型號為GRP3000L,其顯示分辨率為800*480。手持器與控制器之間是通過網線(eHMI)連接,理論傳輸距離可達100m,手持器用于顯示直角坐標機械手的控制系統軟件的相關界面,還可進行相關按鍵的操作,手持器本身只是一個顯示和按鍵處理的工具,本身沒有CPU。手持器共分為十個部分。
2017-10-11 16:01:1810 相對傳統的機器人專用控制器控制方式,基于PC的運動控制卡控制具有成本低、開發自由度高、與行業應用更加匹配等優勢。領略數控具備寫機械手路徑控制的能力,應用研華PCI-1245-AE運控卡實現了對SCARA機械手的運動控制。
2017-09-30 15:59:4422 本文主要介紹使用英威騰DA200高性能交流伺服系統的機械手控制方案具有控制精度高、系統穩定性高、用戶操作靈活的優點。
2017-09-25 15:28:003 機械手臂的資料
2017-05-02 14:17:570 基于單片機設計控制的C語言的機械手臂的控制設計
2016-06-15 17:36:4258 基于單片機設計控制的C語言的機械手臂的控制設計
2016-06-15 17:36:4262 大專生畢業設計任務書《基于PLC的五自由度噴漆機械手控制系統設計》。
2016-03-18 14:03:5810 基于PLC的機械手控制設計(畢業設計)基于PLC的機械手控制設計(畢業設計)
2015-11-13 11:21:0069 本文介紹單片機制作裝箱機械手的原理和結構,概述了采用量程生升降額的控制規律和準確定位。
2011-12-21 09:16:51329 通過對物料搬運機械手裝置結構與功能的介紹,提出了一種電氣伺服和氣動伺服相結合的混合驅動機械手結構類型,重點分析了基于45, 的機械手控制系統組成,并詳細論述了以45, 為核
2011-08-15 17:49:36101 【摘要】介紹了取模機械手的各種動作,并針對機械手的各種動作及工作過程,以單片機為控制系統的核心,給出了系統的硬件、軟件設計以及抗干擾設計。
2010-11-09 16:09:08129 摘要:以JJR-1型教學機器人為基礎描述了智能控制器在機械手定位控制中的應用。對機器人機械手的肴關節進行了測試與折算,給出了其數學模型。在此基礎上提出了采用模糊控制器
2010-08-25 11:15:5761 一四軸聯動簡易機械手的結構及動作過程 ??? 機械手結構如下圖1所示,有氣控機械手(1)、XY軸絲杠組(2)、轉盤機構(3)、旋轉基座(4)等組成。
2010-08-02 18:17:315199 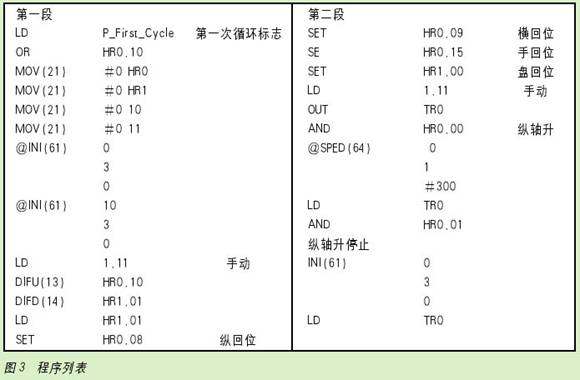
針對多關節工業機械手的比例和開關控制,以PLC作為其控制器,通過無線數傳模塊進行數據傳輸,實現遠程無線遙控操作。手持操作器采用16位單片機,對檢測到的按鈕和搖桿操作進
2010-07-14 15:37:3248 控制要求:機械手一個工作周期可分為八步:第一步是當左工作臺上有工件出現時,I1.5=1,機械手開始下降,下降到位時,I0.5=1,停止下降,第一步結束。第二步是機械手
2010-07-08 12:35:5466 智能控制器在機器人機械手位置控制中的應用
以JJR-1型教學機器人為基礎描述了智能控制器在機械手定位控制中的應用。對機器人機械手的肴關節進行了測試
2010-04-02 10:51:4531 移動機械手是近年來機器人學領域較新的研究課題之一。本文針對已開發的Hebut-Ⅱ型移動機械手系統,介紹了基于RBF 神經網絡的分層智能控制器。控制器仿效人類的行為方式分層
2009-12-31 16:06:208 文章在對一種執行機構由電動機和液壓缸組成的工業機械手的結構進行分析的基礎上,將PLC 應用于其控制系統,完成了系統的硬件設計和軟件設計。根據該機械手的工作特點,采
2009-09-21 10:09:43115 討論了柔性機械手末端負載變化時的控制問題。應用奇異攝動將雙連桿柔性機械手系統分解為慢變、快變兩個子系統。提出一種慢變子系統采用自適應模糊滑模控制、快變子系統采
2009-09-16 10:10:4214 本文針對機械手的遠程控制問題,選用三菱FX2N 系列PLC 作為控制器,以計算機為主站,實現了機械手的可視化遠程控制。文中介紹了控制系統的組成,闡述了控制系統的設計方法。
2009-08-31 09:11:1640 本文論述了基于PLC 機械手與冷卻箱組合裝置的功能、組成、原理。文中介紹了PLC 的選擇,依據生產工藝流程給出了PLC 控制的I/O 分配圖、程序框圖。關鍵詞:PLC;機械手與冷卻箱
2009-08-22 08:30:3710 闡述了計算機遠程控制移動取物機械手的結構與實現過程,提出了其遠程控制系統的體系結構及硬件構成。給出了實現機械手遠程控制的具體解決方案。關鍵詞:并行通訊口 遠程
2009-07-08 08:27:0324 PLC在機械手步進控制中的應用
機械手是工業自動控制領域中經常遇到的一種控制對象。機械手可以完成許多工作,如搬物、裝配、切割
2009-06-19 14:11:081281 
PLC控制系統與電器控制系統的區別
從控制方法上看,電器控制系統控制邏輯采用硬件接線,利用繼電器機械觸點的串聯或并聯等組合成
2009-06-17 13:39:191476 基于PLC控制的注塑機專用機械手
目前,市場上流行的注塑機專用機械手就控制系統而言都是使用專用的微處理機加接口組成的最小控制
2009-06-16 15:24:071825 
基于現場總線的開放結構機械手控制系統是目前機械手控制的發展方向。文章通過對物料搬運機械手裝置及其控制系統的介紹,提出了基于CAN 總線的機械手控制系統方案,分析了
2009-06-03 09:10:2928 本文介紹了OMRONC60P可編程控制器對機械手的控制,包括PLC和I/O的分配圖和接線圖,應用簡潔的移位寄存指令SFT即可獲得步進電機所需的脈沖序列,以 驅
2009-05-31 14:53:0752 基于PLC控制系統的平面噴涂機械手摘要:本文論述了一套平面噴涂機械手裝置的設計過程。該系統由機械部分和控制部分構成,機械部分包括大臂、小臂、氣缸等;控制部分采
2009-05-15 01:01:0359
機械手行車控制電路
2009-02-09 16:13:081285 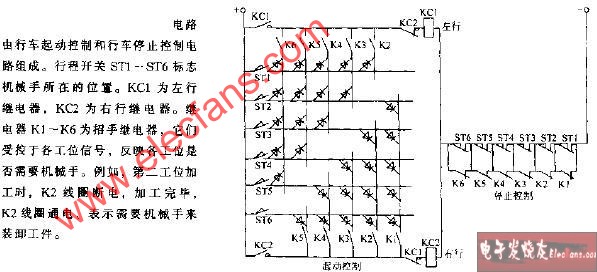
PLC機械手控制的實現二、設計要求:1. 闡述機械手的工作原理2. 如何實現PLC對機械手的控制3. 機械手控制程序設計第一節 機械手的工作原理1.1 機
2008-12-13 14:15:22365 實驗 機械手的PLC的自動控制一.實驗目的1. 掌握機械手步進控制程序設計2. 進一
2008-09-30 12:27:204452 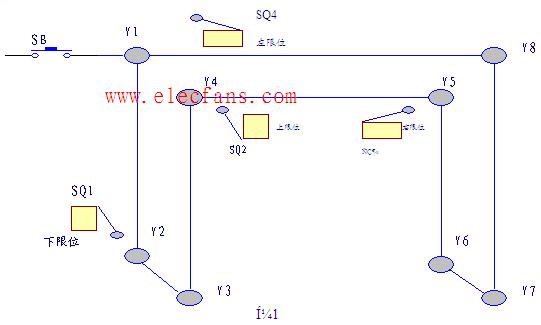
三自由度氣動機械手的PLC控制
一、實驗目的:通過對一個三自由度氣動機械手的控制程序的設計,熟悉基于PLC的
2008-09-23 08:19:422987
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論