 電子發燒友App
電子發燒友App


PCC及其在自動校直切斷機中的應用
本文介紹新型可編程控制器PCC(Programming Computer Controller)的結構模型、多任務處理方式以及編程特點,同時,還介紹了廠校聯合研制的高速自動校直切斷機液壓和電氣系統,以及PCC在高速校直切斷機上的應用。
關鍵詞:PCC;多任務;高速任務級;普通任務級
前言
校直切斷機是用于將鋼筋校直并切斷成設定長度的設備。原有設備其校直速度僅為30m/min,隨著建筑行業的不斷發展,對校直切斷機的生產效率和自動化程度提出了越來越高的要求。由上海交通大學和錫山市蕩口通用機械廠聯合研制的高速自動校直切斷機其校直速度可達120m/min,生產效率和自動化程度大為提高。隨著校直速度的提高,對控制設備的檢測、控制、數據處理的實時性也提出了較高的要求。PLC以其工作可靠(MTBF為10萬小時以上)并適用于惡劣的工作環境而得到了廣泛的應用。但傳統的PLC是單任務型的,不能處理多任務模塊。PCC(Programming Computer Controller)是近年來發展起來的一種新型PLC,它具有多任務處理能力,適合于控制功能復雜、對實時性要求高的場合。
1PCC的多任務處理原理
傳統PLC是單任務型的,應用程序對系統來說僅有一個。PLC的系統軟件對應用程序反復執行,每執行一遍的時間稱為掃描周期,PLC的掃描周期多在1~5ms,該時間足以能識別外部的按鈕、開關等的輸入并做出響應,這種輸入輸出的延遲能被大多數的開關型控制場合所接受。然而,在對實時性要求較高的場合,單任務控制方式顯得不夠靈活甚至不能勝任。
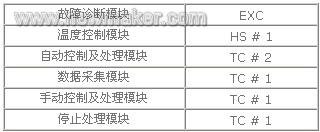
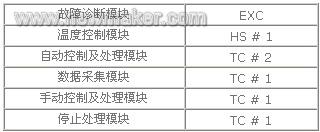
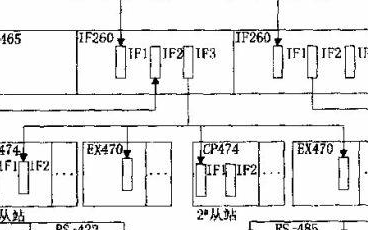
具有多任務處理能力的PCC的結構模型如圖1所示,操作系統內核是具有多任務能力的標準操作系統,主要為多任務應用程序提供資源管理。模型的中間層是PCC軟件包,它在操作系統內核的基礎上對系統任務、多任務應用程序進行管理。系統管理模塊和系統任務模塊管理系統任務,所謂系統任務是指操作系統的進程。高速任務模塊和普通任務模塊分別管理高速任務級別和普通任務級別的應用程序。PCC軟件包系統允許將用戶任務(相對獨立的應用程序模塊)設定為高速任務級別(HS-Task Class)和普通任務級(Task Class)。高速任務級和普通任務級又可相應劃分為如下共8個任務級:HS-Task Class1~HS-Task Class4、Task Class1~Task Class4。其執行的優先級依次遞減,每個任務級別又可設定其周期時間。例如,若HS-Task Class2的周期時間為50μs,則系統每50μs執行一次該級別的任務模塊。
圖1PCC結構模型
以Task Class1和Task Class2兩任務級別為例的執行情況如圖2所示。多任務的處理實際上是先執行級別高的任務,如圖2中的Task Class1,其實際運行時間是4ms,Task Class1執行完后,再執行Task Class2,由于Task Class2的運行時間是9ms,在開始執行ask Class1到下一次執行(即周期10ms)時,Task Class2還未運行完,因Task Class1的優先級別高,所以Task Class2的執行被打斷,而轉去執行Task Class1,等執行完Task Class1后,再轉去執行Task Class2。圖2中①表示的是操作系統時鐘,圖2中②表示的是系統管理所需時間。系統管理時間用于對系統任務的管理,此時間不能改變,并以10ms的操作系統時鐘為周期執行。

圖2多任務執行時序
應用程序各任務模塊級別的設定原則是:在滿足實時性要求的條件下,應盡量降低其級別,以避免CPU過載。應用程序的各任務模塊對CPU的負載度按下式計算

式中:λ ——該任務對CPU的負載度;
Ti——該任務的實際運行時間(ms),可由Profiler軟件測定;
TT——該任務所處級別的周期(ms)。
為保證CPU可靠運行,各任務的λ不應超過80%。此外,為了提高實時多任務的處理能力,PCC在硬件上采用雙CPU結構,一個負責與其它輸入/輸出模塊的通訊,另一個CPU專門用于處理用戶程序。
2PCC在自動校直切斷機上的應用
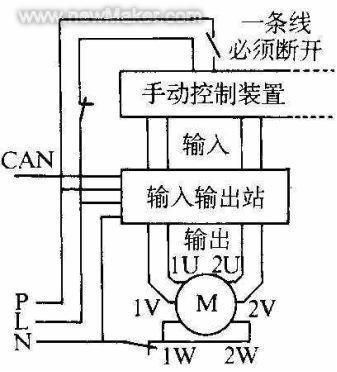
(1)液壓系統
液壓系統原理如圖3所示。圖中1、2為雙聯液壓泵。切斷缸9下行時,電磁鐵8斷電,高壓小流量泵1和低壓大流量泵2同時對切斷缸供油,使其快速下行。切斷鋼筋時負載壓力升高,單向閥6閉合,僅由高壓小流量泵1供油。切斷后,泵2為跟切缸供油,使跟切缸10快速跟切及返回。閥4用于系統短時不工作時對大流量泵卸荷。由于跟切和落料運作幾乎同時進行,高速切斷時兩缸所需流量均較大,故此,落料缸12采用液壓泵3獨立供油,以避免泵的流量過大和兩個液壓系統的相互干擾。節流閥14用于調節落料缸12的工作速度。

圖3液壓系統原理圖

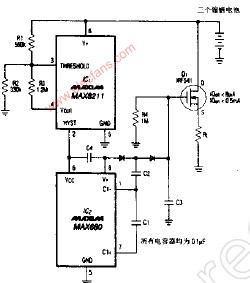
1、2、3. 電機4. 接觸器系統5. SMC6、13. 保護裝置7. 隔離變壓器8、9. 開關電源10. 固態繼電器組11. 電磁鐵組12. 接觸器控制線圈組15. CPU模塊16. DI13517. DI43918. DO43519. DO72014. 手動按鈕組20. 光電轉換器
圖4電氣系統原理圖
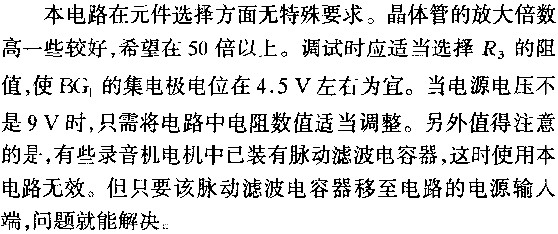
(2)PCC及電氣系統
圖3中電機1用于帶動校直輥對鋼筋校直,電機2是切斷和跟切液壓系統的驅動電機,3是落料液壓系統的驅動電機。中間繼電器組用于PCC的輸出模塊和液壓閥電磁鐵之間的隔離及信號放大,接觸器組用于電機軟啟動、停止及速度轉換。由于1、2兩臺電機的功率較大,為了減小電機啟動過程中對電網的沖擊,采用電機軟啟動器SMC對電機進行軟啟動。
PCC的模塊配置如圖2所示。CP774是CPU模塊,也是PCC的核心模塊。DI135是高速計數模塊。校直輥在校直鋼筋的同時,帶動光電型位置傳感器,位置傳感器的信號經光電轉換器放大整形后送入DI135模塊,對被校鋼筋長度進行檢測。DO435是直流輸出模塊,其輸出觸點控制中間繼電器,中間繼電器輸出觸點控制電磁閥的動作。DO720是交流輸出模塊,其輸出觸點控制交流接觸器的控制線圈,通過交流接觸器實現對三臺電機的啟停控制及校直電機的高低速控制。DI439是輸入模塊,手動按鈕主要用于系統的調試。PanelWare是與PCC配套的人機交互設備,通過RS232通訊電纜與PCC交互信息。通過PanelWare的面板鍵和顯示屏可設定被加工鋼筋的規格、切斷長度、切斷根數等。
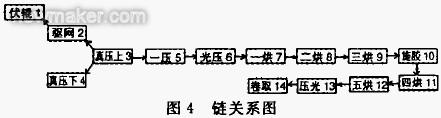
PanelWare的人機交互程序在PanelWare Studio的開發平臺上開發,主要是人機界面的設計、輸入設定參數、設定并讀取控制鍵等功能。PCC的編程采用Pg2000語言,Pg2000語言是一種類似C語言的編程語言,它結合了C語言和Pascal語言兩者的優點。C語言的大部分語法規則都適用于Pg2000語言。由于PCC的系統軟件支持多任務處理,本設計中按工藝流程應實現的控制功能將整個控制過程劃分成14個任務模塊(程序模塊),其中主要有參數讀取模塊、自動切模塊、自動跟切模塊、自動落料模塊、自動停車模塊、速度控制模塊、連續切控制模塊等。這14個模塊根據實時性要求的不同,又劃分為三個任務級別。由于自動切模塊除了控制切刀的動作外,還負責接收計數器計數值,將其設置為任務級別最高的任務模塊,其執行周期最短,從而將計數誤差控制到最小限度并及時控制閥的動作。而讀取參數模塊是讀取操作人員輸入的加工參數設定值,對實時性要求較低,可以將其設定為低級別的任務模塊,加大執行周期,以減輕對CPU的壓力。
3結束語
具有多任務處理功能的PCC是近年來發展起來的新一代PLC,它不僅適用于小規模的控制,更能勝任復雜的對實時性要求高的控制場合,而且其趨勢是系統的可擴展性和對現場總線和網絡的支援也在不斷增強,隨著規模的不斷擴大,多任務處理能力越來越顯示出生命力。采用PCC控制的自動校直切斷機其校直速度提高到了原來的4倍,除生產效率大幅度提高外,其性能、易操作性也有較大的改善。












 工商網監
工商網監
評論