。其中,伺服電機(jī)被稱為“工業(yè)機(jī)器人的心臟”,成本占比約35%,一般安裝在機(jī)器人的“關(guān)節(jié)”處,為工業(yè)機(jī)器人提供精準(zhǔn)的控制效果。伺服電機(jī)廣泛應(yīng)用于先進(jìn)制造業(yè),替代需求+新
2023-08-14 09:51:44 350
350 
泰科伺服生產(chǎn)的MT無(wú)刷伺服系統(tǒng)主要由IDM系列伺服驅(qū)動(dòng)器與兼容NEMA法蘭尺寸的直流無(wú)刷伺服電機(jī)組合而成。采用直流供電,最大功率可達(dá)600W,主要應(yīng)用于小型移動(dòng)機(jī)器人、自動(dòng)化檢測(cè)組裝、醫(yī)療設(shè)備等行業(yè)
2023-04-20 10:45:52
定位, 且轉(zhuǎn)動(dòng)慣性小,動(dòng)態(tài)響應(yīng)快。主要應(yīng)用包括自動(dòng)化生產(chǎn)線,機(jī)器人關(guān)節(jié),機(jī)器人關(guān)節(jié)、醫(yī)醫(yī)療儀器及設(shè)備、精密儀器和工業(yè)控制系統(tǒng),以及其他許多的應(yīng)用。
2023-04-20 10:07:10
RDM協(xié)作機(jī)器人關(guān)節(jié)伺服驅(qū)動(dòng)模塊是一款基于FPGA 先進(jìn)技術(shù)開(kāi)發(fā)而成的高性能、直流供電、結(jié)構(gòu)極其緊湊的全數(shù)字通用伺服驅(qū)動(dòng)器,最大功率可達(dá) 1000W。通過(guò)EtherCAT/CANopen 總線控制
2023-04-19 15:39:40
RJS-II系列關(guān)節(jié)模組是泰科智能推出的一款基于模塊化理念設(shè)計(jì)、輕巧、高精度的協(xié)作機(jī)器人關(guān)節(jié),一體化集成的RJS-II不僅結(jié)構(gòu)尺寸更小,性價(jià)比更高,為您解決機(jī)器人在更多復(fù)雜環(huán)境中的適應(yīng)性和穩(wěn)定性
2023-04-19 15:03:00
深圳泰科智能TA6系列協(xié)作機(jī)器人是泰科智能自主研發(fā)的6自由度的協(xié)作機(jī)器人,具有拖動(dòng)示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設(shè)計(jì)的RJS系列關(guān)節(jié)模組,既輕便靈活、運(yùn)行平滑柔順,同時(shí)滿足
2023-04-19 11:14:26
工業(yè)領(lǐng)域之中。 發(fā)展歷史編輯 播報(bào)20世紀(jì)50年代末,工業(yè)機(jī)器人最早開(kāi)始投入使用。約瑟夫·恩格爾貝格(Joseph F.Englberger)利用伺服系統(tǒng)的相關(guān)靈感,與喬治·德沃爾(GeorgeDevol)共同開(kāi)發(fā)了一臺(tái)工業(yè)機(jī)器人——“尤尼梅特”(Unimate)
2023-04-19 10:54:061002 RJU系列關(guān)節(jié)模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機(jī)器人關(guān)節(jié),而是一款能夠給機(jī)器人更多設(shè)計(jì)空間,和應(yīng)用領(lǐng)域的關(guān)節(jié),客戶可根據(jù)自身產(chǎn)品方向,自由定位
2023-04-19 10:53:03
RJU系列關(guān)節(jié)模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機(jī)器人關(guān)節(jié),而是一款能夠給機(jī)器人更多設(shè)計(jì)空間,和應(yīng)用領(lǐng)域的關(guān)節(jié),客戶可根據(jù)自身產(chǎn)品方向,自由定位
2023-04-19 10:48:11
定位, 且轉(zhuǎn)動(dòng)慣性小,動(dòng)態(tài)響應(yīng)快。主要應(yīng)用包括自動(dòng)化生產(chǎn)線,機(jī)器人關(guān)節(jié),機(jī)器人關(guān)節(jié)、醫(yī)醫(yī)療儀器及設(shè)備、精密儀器和工業(yè)控制系統(tǒng),以及其他許多的應(yīng)用。
2023-04-18 17:35:19
產(chǎn)品優(yōu)勢(shì)專注機(jī)器人關(guān)節(jié)研發(fā),RJS系列關(guān)節(jié)模組具有定位精度高、性能可靠等特點(diǎn)。 模塊化設(shè)計(jì)RJS關(guān)節(jié)模組集成無(wú)框電機(jī)、驅(qū)動(dòng)器、諧波減速器、編碼器、制動(dòng)器于一體,結(jié)構(gòu)小巧緊湊,6軸RJS關(guān)節(jié)
2023-04-18 14:04:34
RDM協(xié)作機(jī)器人關(guān)節(jié)伺服驅(qū)動(dòng)模塊是一款基于FPGA 先進(jìn)技術(shù)開(kāi)發(fā)而成的高性能、直流供電、結(jié)構(gòu)極其緊湊的全數(shù)字通用伺服驅(qū)動(dòng)器,最大功率可達(dá) 1000W。通過(guò)EtherCAT/CANopen
2023-04-17 18:13:06
RJU系列關(guān)節(jié)模組——面向商業(yè)、生活服務(wù)類應(yīng)用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機(jī)器人關(guān)節(jié),而是一款能夠給機(jī)器人更多設(shè)計(jì)空間,和應(yīng)用領(lǐng)域的關(guān)節(jié),客戶
2023-04-17 17:40:55
RJU系列關(guān)節(jié)模組——面向商業(yè)、生活服務(wù)類應(yīng)用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機(jī)器人關(guān)節(jié),而是一款能夠給機(jī)器人更多設(shè)計(jì)空間,和應(yīng)用領(lǐng)域的關(guān)節(jié),客戶
2023-04-17 16:25:29
深圳泰科智能TB6-R5協(xié)作機(jī)器人是一款靈活的輕型工業(yè)協(xié)作機(jī)器人,具有精巧的機(jī)械結(jié)構(gòu)設(shè)計(jì)。這款協(xié)作機(jī)器人有效負(fù)載為5KG,自重僅為23KG,重復(fù)定位精度可達(dá)±0.05mm,適應(yīng)多樣性、柔性生產(chǎn)
2023-04-17 16:12:03
RJS-II系列關(guān)節(jié)模組是泰科智能推出的一款基于模塊化理念設(shè)計(jì)、輕巧、高精度的協(xié)作機(jī)器人關(guān)節(jié),一體化集成的RJS-II不僅結(jié)構(gòu)尺寸更小,性價(jià)比更高,為您解決機(jī)器人在更多復(fù)雜環(huán)境中的適應(yīng)性和穩(wěn)定性
2023-04-17 15:02:00
工業(yè)機(jī)器人的基礎(chǔ)知識(shí)工業(yè)機(jī)器人是能模仿人體某些器官的功能(主要是動(dòng)作功能)、有獨(dú)立的控制系統(tǒng)、可以改變工作程序和編程的多用途自動(dòng)操作裝置。 工業(yè)機(jī)器人在工業(yè)生產(chǎn)中能代替人做某些單調(diào)、頻繁和重復(fù)
2010-05-18 22:03:02
完成沿著X、Y、Z、(A、B、C)軸上的線性運(yùn)動(dòng)來(lái)進(jìn)行的。 直坐標(biāo)機(jī)器人 直坐標(biāo)機(jī)器人控制系統(tǒng) ? 關(guān)節(jié)機(jī)器人 關(guān)節(jié)機(jī)器人,也稱關(guān)節(jié)機(jī)械手臂或多關(guān)節(jié)機(jī)器人,其各個(gè)關(guān)節(jié)的運(yùn)動(dòng)都是轉(zhuǎn)動(dòng),與人的手臂類似。關(guān)節(jié)機(jī)器人是當(dāng)今工業(yè)領(lǐng)域中最
2022-11-02 14:59:561339 
工業(yè)機(jī)器人大體上分類為線性機(jī)器人(又叫直角坐標(biāo)機(jī)器人)、多自由度機(jī)器人(又叫多關(guān)節(jié)機(jī)器人)、并聯(lián)機(jī)器人(又叫deltaΔ機(jī)器人)和水平多關(guān)節(jié)機(jī)器人(又叫scara機(jī)器人)。由各種類型的關(guān)節(jié)機(jī)械手臂和自動(dòng)化傳輸設(shè)備結(jié)合而成的自動(dòng)化島。不同功能的自動(dòng)化島鏈接而成自動(dòng)化線,不同的自動(dòng)化線結(jié)合組成自動(dòng)化車間。
2022-11-01 14:34:211513 電子發(fā)燒友網(wǎng)站提供《Arduino和微型伺服系統(tǒng)制作的機(jī)器人.zip》資料免費(fèi)下載
2022-10-19 09:12:33 0
0 工業(yè)機(jī)器人有4大組成部分,分別為本體、伺服、減速器和控制器。而其中,工業(yè)機(jī)器人電動(dòng)伺服系統(tǒng)的一般結(jié)構(gòu)為三個(gè)閉環(huán)控制,即電流環(huán)、速度環(huán)和位置環(huán)。一般情況下,對(duì)于交流伺服驅(qū)動(dòng)器,可通過(guò)對(duì)其內(nèi)部功能參數(shù)進(jìn)行人工設(shè)定而實(shí)現(xiàn)位置控制、速度控制、轉(zhuǎn)矩控制等多種功能。
2022-09-09 14:21:381478 電子發(fā)燒友網(wǎng)報(bào)道(文/李寧遠(yuǎn))在機(jī)器人行業(yè)里,伺服驅(qū)動(dòng)是一個(gè)老生常談的話題了。隨著工業(yè)4.0的加速更迭,機(jī)器人的伺服驅(qū)動(dòng)也隨之升級(jí)。現(xiàn)在的機(jī)器人系統(tǒng)既要求驅(qū)動(dòng)系統(tǒng)能控制更多的軸數(shù),還要能實(shí)現(xiàn)更多
2022-08-25 08:10:002865 
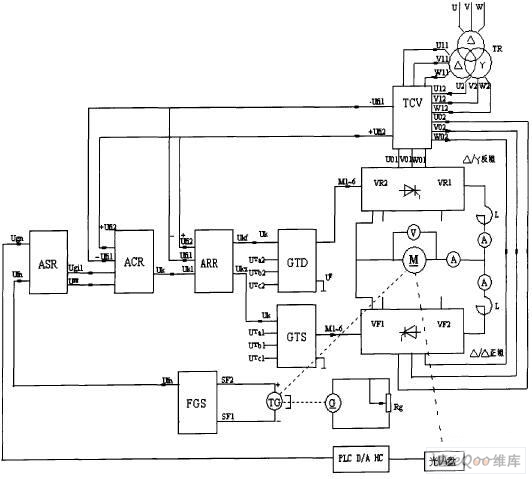
PLC的工業(yè)機(jī)器人關(guān)節(jié)直流伺服系統(tǒng)(安徽力普拉斯電源技術(shù)有限公司湖州地區(qū)電話)-文檔為PLC的工業(yè)機(jī)器人關(guān)節(jié)直流伺服系統(tǒng)總結(jié)文檔,是一份不錯(cuò)的參考資料,感興趣的可以下載看看,,,,,,,,,,,,,,
2021-09-17 15:54:5813 機(jī)器人關(guān)節(jié)伺服控制系統(tǒng)設(shè)計(jì)與仿真
2021-06-22 14:53:1033 機(jī)器人關(guān)節(jié)是機(jī)器人各個(gè)零部件之間發(fā)生相對(duì)運(yùn)動(dòng)的機(jī)構(gòu)。關(guān)節(jié)之中,單獨(dú)驅(qū)動(dòng)的為主動(dòng)關(guān)節(jié),反之稱為從動(dòng)關(guān)節(jié)。機(jī)器人關(guān)節(jié)模組通常采用超聲波電機(jī)、伺服電機(jī)、諧波減速器、VR減速器、行星齒輪箱電機(jī)等。 機(jī)器人
2021-06-13 10:00:008948 機(jī)器人關(guān)節(jié)是機(jī)器人各個(gè)零部件之間發(fā)生相對(duì)運(yùn)動(dòng)的機(jī)構(gòu)。關(guān)節(jié)之中,單獨(dú)驅(qū)動(dòng)的為主動(dòng)關(guān)節(jié),反之稱為從動(dòng)關(guān)節(jié)。機(jī)器人關(guān)節(jié)模組通常采用超聲波電機(jī)、伺服電機(jī)、諧波減速器、VR減速器、行星齒輪箱電機(jī)等。
2021-05-28 09:11:441 目前,工業(yè)機(jī)器人關(guān)節(jié)主要是采用交流伺服系統(tǒng)進(jìn)行控制,本研究將技術(shù)成熟、編程方便、可靠性高、體積小的SIEMENS S-200可編程控制器 ,應(yīng)用于可控環(huán)流可逆調(diào)系統(tǒng),研制出機(jī)器人關(guān)節(jié)直流伺服系統(tǒng),用以對(duì)工業(yè)機(jī)器人關(guān)節(jié)進(jìn)行伺服控制。
2021-04-11 08:51:009677 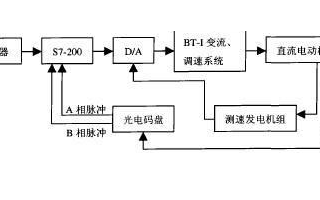
本文對(duì)機(jī)器人視覺(jué)伺服技術(shù)進(jìn)行了綜述,介紹了機(jī)器人視覺(jué)伺服系統(tǒng)的概念及發(fā)展歷程和分類,重點(diǎn)介紹了基于位置的視覺(jué)伺服系統(tǒng)和基于圖像的視覺(jué)伺服系統(tǒng)。對(duì)機(jī)器人視覺(jué)所涉及的前沿問(wèn)題做了概括,并指出了目前研究中所存在的問(wèn)題及今后發(fā)展方向。
2021-04-08 09:11:5310893 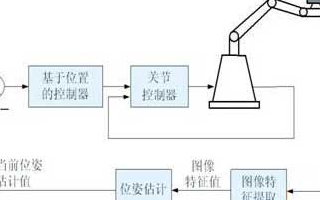
零部件研發(fā)制造主要包括伺服系統(tǒng)、減速器和控制器等,占工業(yè)機(jī)器人成本的70%左右。減速器、伺服系統(tǒng)(包括伺服電機(jī)和伺服驅(qū)動(dòng))及控制器直接決定工業(yè)機(jī)器人的性能、可靠性和負(fù)荷能力,對(duì)機(jī)器人整機(jī)起著至關(guān)重要的作用。 中游是工
2021-03-29 10:57:183266 
《2019年全球工業(yè)機(jī)器人伺服電機(jī)行業(yè)報(bào)告》預(yù)計(jì)到2019年,中國(guó)市場(chǎng)對(duì)伺服電機(jī)的需求將達(dá)到18.2萬(wàn)臺(tái)。 伺服系統(tǒng)是工業(yè)機(jī)器人的必不可少的關(guān)鍵零部件,是利用各種電機(jī)產(chǎn)生的力矩和力,直接或間接地驅(qū)動(dòng)機(jī)器人
2020-06-12 14:52:431150 什么是工業(yè)機(jī)器人伺服系統(tǒng)?
2019-05-04 08:57:004639 
機(jī)器人視覺(jué)伺服系統(tǒng)是機(jī)器視覺(jué)和機(jī)器人控制的有機(jī)結(jié)合,是一個(gè)非線性、強(qiáng)耦合的復(fù)雜系統(tǒng),其內(nèi)容涉及圖象處理、機(jī)器人運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)、控制理論等研究領(lǐng)域。隨著攝像設(shè)備性能價(jià)格比和計(jì)算機(jī)信息處理速度的提高,以及有關(guān)理論的日益完善,視覺(jué)伺服已具備實(shí)際應(yīng)用的技術(shù)條件,相關(guān)的技術(shù)問(wèn)題也成為當(dāng)前研究的熱點(diǎn)。
2019-05-03 10:32:003214 從市場(chǎng)情況來(lái)看,2018年交流伺服系統(tǒng)市場(chǎng)規(guī)模增速下滑明顯,而工業(yè)機(jī)器人用伺服系統(tǒng)的需求規(guī)模逐年增加,且工業(yè)機(jī)器人專用伺服占交流伺服系統(tǒng)市場(chǎng)比重逐年上升。
2019-04-29 09:10:066833 
和伺服機(jī)構(gòu)控制的重要部分。因而要了解機(jī)器人的運(yùn)作過(guò)程,必然繞不過(guò)伺服系統(tǒng)。 伺服系統(tǒng) 伺服系統(tǒng)是以變頻技術(shù)為基礎(chǔ)發(fā)展起來(lái)的產(chǎn)品,是一種以機(jī)械位置或角度作為控制對(duì)象的自動(dòng)控制系統(tǒng)。
2018-07-10 01:04:0024526 的“大腦”;伺服系統(tǒng)主要以伺服電機(jī)為主,相當(dāng)于機(jī)器人的“神經(jīng)系統(tǒng)”;減速器則是技術(shù)壁壘最高的領(lǐng)域,往往安裝于運(yùn)動(dòng)關(guān)節(jié)處。
2018-07-02 15:50:002346 
對(duì)工業(yè)機(jī)器人的總體結(jié)構(gòu)和設(shè)計(jì)要求進(jìn)行縫隙,對(duì)伺服控制系統(tǒng)和工業(yè)機(jī)器人的驅(qū)動(dòng)特點(diǎn)進(jìn)行了論述,確定工業(yè)機(jī)器人驅(qū)動(dòng)采用全數(shù)字交流伺服控制系統(tǒng),完成伺服電機(jī)和驅(qū)動(dòng)器的研究。
2017-10-13 17:34:2712 針對(duì)用于激光焊接的關(guān)節(jié)型工業(yè)機(jī)器人運(yùn)動(dòng)誤差控制問(wèn)題,根據(jù)關(guān)節(jié)型工業(yè)機(jī)器人伺服控制和運(yùn)動(dòng)學(xué)原理,分析了機(jī)器人運(yùn)動(dòng)誤差的積累過(guò)程,并對(duì)運(yùn)動(dòng)誤差和伺服系統(tǒng)誤差分別進(jìn)行了測(cè)量和比較。結(jié)果表明,伺服系統(tǒng)誤差是運(yùn)動(dòng)誤差的重要組成部分。該結(jié)論對(duì)機(jī)器人激光焊接的路徑控制具有一定參考意義。
2017-10-12 18:19:066 隨著工業(yè)自動(dòng)化的發(fā)展,越來(lái)越多的領(lǐng)域開(kāi)始使用工業(yè)機(jī)器人代替人力。對(duì)于機(jī)器人制造商和機(jī)器人消費(fèi)者而言,選擇合適的伺服電機(jī)始終是一項(xiàng)艱難的任務(wù)。機(jī)器人的關(guān)節(jié)驅(qū)動(dòng)離不開(kāi)伺服系統(tǒng),關(guān)節(jié)越多,機(jī)器人的柔性
2017-09-29 11:45:344 機(jī)器人視覺(jué)伺服系統(tǒng)是機(jī)器人領(lǐng)域中的重要研究方向,起源于80年代初,隨著計(jì)算機(jī)技術(shù)、圖像處理技術(shù)、控制理論的發(fā)展,取得了很大進(jìn)步,有一些系統(tǒng)已投入使用。視覺(jué)伺服跟通常所
2011-10-08 16:04:421779 基于PLC研制的直流伺服系統(tǒng),利用PLC擴(kuò)展能力強(qiáng)的特點(diǎn),添裝手動(dòng)輸放裝置,實(shí)現(xiàn)工業(yè)機(jī)器人關(guān)節(jié)直流伺服系統(tǒng)的可視操作。
2011-05-11 10:13:403950 
基于MatlabRTW 的機(jī)器人伺服系統(tǒng)設(shè)計(jì)方案:機(jī)器人伺服控制系統(tǒng)是非線性多變量的控制系統(tǒng),這給系統(tǒng)的開(kāi)發(fā)提出了更多、更復(fù)雜的問(wèn)題,使得機(jī)器人控制系統(tǒng)的開(kāi)發(fā)困難.文中提出一
2009-10-06 10:12:0334 機(jī)器人視覺(jué)伺服系統(tǒng)是機(jī)器人領(lǐng)域一項(xiàng)重要的研究方向,它的研究對(duì)于開(kāi)發(fā)手眼協(xié)調(diào)的機(jī)器人在工業(yè)生產(chǎn)、航空航天等方面的應(yīng)用有著重要的意義。本文針對(duì)機(jī)器人視覺(jué)伺服系統(tǒng)的
2009-05-30 11:34:0127
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論