 電子發(fā)燒友App
電子發(fā)燒友App


DCS是以計(jì)算機(jī)技術(shù)、CRT技術(shù)、控制技術(shù)和通信技術(shù)為基礎(chǔ)發(fā)展起來的先進(jìn)控制系統(tǒng)。其大小各異,種類繁多,廣泛應(yīng)用于化工、冶金、電力、煤炭等各個(gè)行業(yè)。我廠采用的DCS主要用于冶練、制氧和硫酸生產(chǎn),4年多時(shí)間的使用證明這套系統(tǒng)完全滿足生產(chǎn)的需要。但是,使用過程中的經(jīng)驗(yàn)和教訓(xùn)也值得探討。
理論上,DCS由上述四大技術(shù)組成,但在實(shí)際應(yīng)用中可根據(jù)硬件組成和網(wǎng)絡(luò)的拓?fù)浣Y(jié)構(gòu)分成控制部分、通信部分、人機(jī)接口三部分。
選型過程中應(yīng)注意的問題
DCS的選型原則應(yīng)該是可靠、足夠、適用、先進(jìn)。
實(shí)際選型時(shí)切不可片面追求先進(jìn)性而忽略可靠性。例如我廠DCS的人機(jī)接口有兩種類型,其中一類通過長期使用,在可靠性方面無可挑剔;另一類是剛剛推出的產(chǎn)品,盡管它在硬件的性能上,在流程圖畫面編程平臺上比前者先進(jìn)很多,但新產(chǎn)品未經(jīng)過長期使用的檢驗(yàn),在可靠性方面卻略遜于前者。另外,人機(jī)接口中的打印機(jī)、CRT最好選擇國內(nèi)普遍采用的成熟的有可靠服務(wù)保障的產(chǎn)品。筆者甚至認(rèn)為,用戶應(yīng)建議DCS制造廠商提供國內(nèi)流行的商用機(jī)或工控機(jī)作為人機(jī)接口,這樣不但方便維修,更換起來價(jià)格便宜、交貨期又短。
DCS系統(tǒng)選型的主要注意事項(xiàng)
系統(tǒng)總體設(shè)計(jì)選型
目前DCS系統(tǒng)的設(shè)計(jì)理念為高可靠性、高可用性相結(jié)合的設(shè)計(jì)理念;所有的核
心組件全部支持冗余設(shè)計(jì)。
總體設(shè)計(jì)在硬件結(jié)構(gòu)上分為兩個(gè)流派:集中板卡式和分散模塊式。
集中板卡式:機(jī)柜先安裝機(jī)籠,I/O模塊以板卡形式插在機(jī)籠中。這種安裝方式的優(yōu)先是抗震性能好,電路板上方便布置多器件,因而通道數(shù)量較多。缺點(diǎn)是受機(jī)籠限制,安裝不靈活。因另外需要控制布置接線端子,占用空間大,只能證明布置卡件,反面布置接線端子板,需要采用專門機(jī)柜。
分散模塊式:機(jī)柜無需機(jī)籠,I/O模塊以獨(dú)立模塊形式安裝在機(jī)柜中。這個(gè)安裝方式的優(yōu)點(diǎn)是靈活方便可以在任意空間安裝、占用空間小、散熱良好。缺點(diǎn)抗震性能低于板卡式。因模塊體積小,通道數(shù)量會(huì)受限制。
隨著電子元器件的發(fā)展,小型化、智能化是發(fā)展趨勢,模塊式越來越顯示出靈活多變的優(yōu)勢,板卡式初步淘汰。因此YOKOGAWA和Honeywell都完成了由大板卡式向小模塊式的轉(zhuǎn)變, ABB全系列。Emerson的DeltaV、Invensys的I/A、Ovation等都采用分散模塊結(jié)構(gòu)。國內(nèi)的和利時(shí)的最新K系列和浙江中控的ECS700都采用分散模塊式結(jié)構(gòu)。
總體設(shè)計(jì)在軟件結(jié)構(gòu)上分為兩個(gè)流派:對等網(wǎng)結(jié)構(gòu)(P/P)和客戶/服務(wù)器C/S結(jié)構(gòu)。
對等網(wǎng)結(jié)構(gòu)(P/P):控制站同操作員站的地位對等,通訊方式點(diǎn)對點(diǎn)。優(yōu)點(diǎn)是通訊不依賴于通訊節(jié)點(diǎn),危險(xiǎn)相對分散。缺點(diǎn)是一個(gè)域的系統(tǒng)規(guī)模受限制。數(shù)據(jù)處理量也受限制。難以適合核電等超大規(guī)模系統(tǒng)結(jié)構(gòu)。
客戶/服務(wù)器C/S結(jié)構(gòu):控制器和操作站的通訊通過服務(wù)器節(jié)點(diǎn)通訊。優(yōu)點(diǎn)是利于做大型和超大型系統(tǒng),缺點(diǎn)是通訊依賴于冗余的服務(wù)器節(jié)點(diǎn),對服務(wù)器的可靠性要求高。
鑒于對等網(wǎng)結(jié)構(gòu)(P/P)和客戶/服務(wù)器C/S結(jié)構(gòu)各有優(yōu)勢,最先進(jìn)的系統(tǒng)是可以混合結(jié)構(gòu),兩種通訊結(jié)構(gòu)都支持,而且可以同時(shí)存在于一套系統(tǒng)中。如Honeywell的PKS-C300系列和和利時(shí)的MACS-K系列。既可以危險(xiǎn)分散又可適應(yīng)大規(guī)模。
硬件選型
1)控制器
控制器選擇的考慮因素主要有響應(yīng)周期、帶模塊能力和擴(kuò)展能力。運(yùn)算周期決定用于裝置需要的反應(yīng)速度;帶模塊能力決定了系統(tǒng)規(guī)模;擴(kuò)展能力決定了接第三方儀表的能力。
2)響應(yīng)周期
控制器的響應(yīng)周期包括采樣周期和運(yùn)算周期兩部分,采樣周期取決于I/O模塊采樣速度和I/O模塊總線速度。運(yùn)算周期取決于CPU運(yùn)算速度。先進(jìn)的控制器通常具備可設(shè)置不同的運(yùn)算周期以滿足控制的需要。通常為100ms、200ms、500ms、1000ms、2000ms可選,不同的控制對象可以用不同的運(yùn)算周期,是衡量控制器技術(shù)是否先進(jìn)的重要標(biāo)志。
選擇控制器的運(yùn)算速度不能只看CPU的主頻,因?yàn)椴煌南到y(tǒng)構(gòu)架,系統(tǒng)運(yùn)算的效率差別較大。目前主要有基于PowerPC、ARM和X86構(gòu)架,其中X86構(gòu)架的CPU雖然主頻很高,但運(yùn)算效率不一定很高,同樣構(gòu)架下采用RISC(Reduced Instruction-Set Computer)指令相比CISC(complex instruction set computer)指令效率更高。
對于常規(guī)控制回路要求從IO經(jīng)過PID運(yùn)算,至AO輸出的累積響應(yīng)周期最快可達(dá)到250ms、500ms和1000ms三檔,同時(shí)控制器應(yīng)具備快速控制能力,從IO經(jīng)過PID運(yùn)算,至AO輸出的累積響應(yīng)周期最快可達(dá)到120ms。
3)帶模塊能力
帶模塊能力決定了單控制站系統(tǒng)規(guī)模,大多數(shù)DCS系統(tǒng)都在60~120個(gè)范圍,市面上單模塊點(diǎn)數(shù)在模擬量8/16點(diǎn),開關(guān)量16/32點(diǎn)。單控制站容量在600-1200點(diǎn)左右。帶模塊能力與控制響應(yīng)速度是一對矛盾,當(dāng)響應(yīng)時(shí)間短的控制場合,需要相應(yīng)減少帶模塊數(shù)量。特別要限制快速控制回路模塊數(shù)量。一般以控制器負(fù)荷不大于50%為最終要求。
4)擴(kuò)展能力
需要現(xiàn)場總線儀表接入的場合,要求控制器具備第三方總線儀表接入的能力,目前是DP總線、PA總線、Modbus總線和FF總線較為普遍。這就要求控制器具備下掛網(wǎng)關(guān)總線模塊的能力。
控制器冗余是DCS選型的必須要求,冗余切換的時(shí)間一般要求不大于2ms,這對于現(xiàn)代電子技術(shù)來說很容易,診斷電路的快速和準(zhǔn)確性,決定了切換的時(shí)間。但軟件的無擾切換直接影響現(xiàn)場設(shè)備,因此軟件輸出數(shù)據(jù)的無擾切換是才是衡量控制器冗余技術(shù)的關(guān)鍵技術(shù)。一般要求不大于最小控制周期。因此兩個(gè)控制器的數(shù)據(jù)同步技術(shù)是保證無擾切換的關(guān)鍵。DCS控制器冗余原理見圖4-1-2。
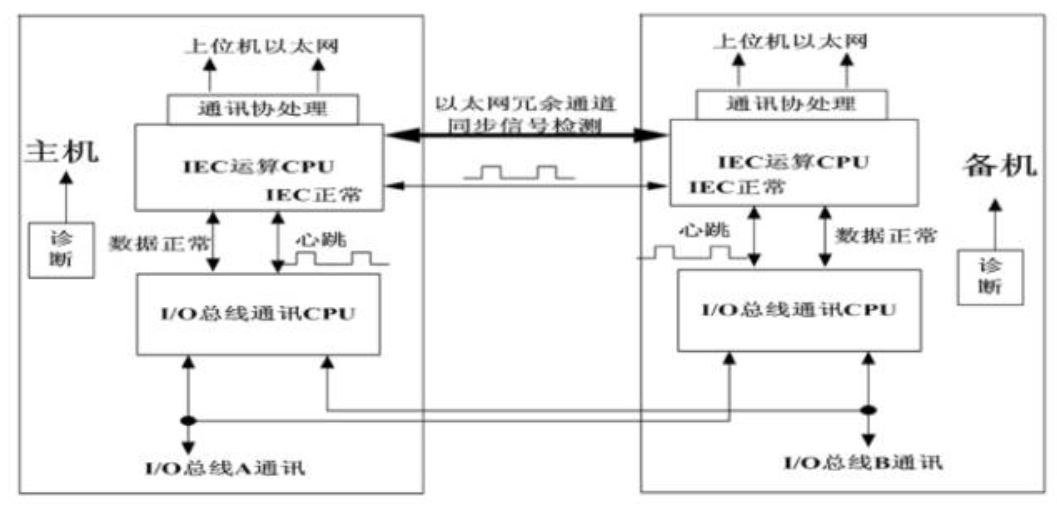
圖4-1-2 DCS控制器冗余原理圖
5)通訊網(wǎng)絡(luò)
控制器與人機(jī)界面操作站之間的通訊網(wǎng)絡(luò)一般由以太網(wǎng)構(gòu)成的冗余網(wǎng)絡(luò)。通訊速率為100/1000Mbps.控制站與內(nèi)部I/O模塊之間的網(wǎng)絡(luò)一般有自定義的冗余總線構(gòu)成,通訊速率為500Kbps到10Mbps不等。控制器與I/O模塊的總線分為并行總線和串行總線兩種,因串行總線在抗干擾,可擴(kuò)展性要更好,已經(jīng)形成發(fā)展大趨勢。
網(wǎng)絡(luò)具有物理層和協(xié)議層雙重隔離,通訊負(fù)荷要求不超過40%。
6)電源設(shè)計(jì)
DCS電源交流為AC220V為主,電源輸入穩(wěn)定度要求不大于10%,頻率輸入穩(wěn)定度不大于2%。DC24V電壓輸出波動(dòng)不大于5%,DC48V電壓輸出波動(dòng)不大于10%。
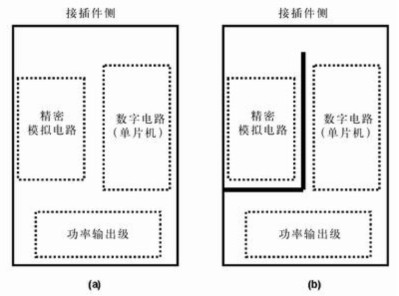
DCS實(shí)際分為模擬部分電源和數(shù)字部分電源兩大部分供電,要求系統(tǒng)自帶電源將模擬部分和數(shù)字部分隔離供電。電源也要求冗余供電,且要求只剩單個(gè)電源時(shí),負(fù)載不超過額定功率的70%。現(xiàn)場儀表設(shè)備的供電要求與DCS系統(tǒng)隔離供電。電源要求有自保護(hù)功能,局部誤接入高壓或外部設(shè)備短路,不會(huì)造成控制站電源系統(tǒng)故障,系統(tǒng)電源模塊故障次數(shù)不大于2次/年。
7)IO模塊選型
IO設(shè)計(jì)從開始推出時(shí)的單點(diǎn)卡,到后期的多點(diǎn)卡,高密度卡;系統(tǒng)的模塊采用背板插裝方式,到目前逐步采用獨(dú)立模塊設(shè)計(jì);系統(tǒng)的整體設(shè)計(jì)可靠性提升,且最大便利提供用戶的易維護(hù)性。任意模塊故障不影響其他模塊,任意通道故障不影響其他通道,系統(tǒng)中I/O模塊故障次數(shù)不大于4次/年。
模塊類型應(yīng)該滿足目前國際上通用的信號采樣標(biāo)準(zhǔn):
AI、AO、DI、DO、PI(脈沖輸入)、SOE、
RTD、TC等。
I/O卡配置原則:
控制用AI/AO卡應(yīng)1:1冗余配置。
聯(lián)鎖用DI/DO卡應(yīng)1:1冗余配置。
監(jiān)測用AI/TC/RTD通道數(shù)不超過32點(diǎn)。
監(jiān)測用脈沖通道數(shù)不超過16點(diǎn)。
DI點(diǎn)通道數(shù)不超過16點(diǎn),來自電氣的DI必須采用繼電器隔離。
DO點(diǎn)聯(lián)鎖時(shí)卡件通道數(shù)不超過16點(diǎn),必須采用繼電器隔離。
危險(xiǎn)氣體監(jiān)測卡需要單獨(dú)設(shè)置卡件。
系統(tǒng)一般預(yù)留20%的備用卡件,同時(shí)預(yù)留15%的擴(kuò)展空間。
全部I/O卡基于惡劣的工業(yè)環(huán)境設(shè)計(jì),符合EMC的設(shè)計(jì)規(guī)范,應(yīng)帶電磁隔離或光電隔離,抗干擾性符合工業(yè)環(huán)境下的國際標(biāo)準(zhǔn)IEC61000。有防腐需要時(shí)系統(tǒng)防腐蝕能力滿足ISA S71.04標(biāo)準(zhǔn)G3等級要求。I/O模塊需要有斷線、短路、超量程、通訊等報(bào)警功能。
需要防爆的場合,需要選配安全柵或帶本安防爆的卡件。
控制I/O模塊要求冗余配置,常用的是AI冗余有兩種原理,以Honeywell C300硬件為代表采用并聯(lián)冗余機(jī)制,原理是將電流信號通過同一個(gè)250歐姆電阻,轉(zhuǎn)換為電壓信號,再并聯(lián)兩個(gè)測電壓模塊同時(shí)測量,同時(shí)送控制器,由控制器挑選品質(zhì)好的模塊運(yùn)算。并聯(lián)式冗余示意圖如圖4-1-3。
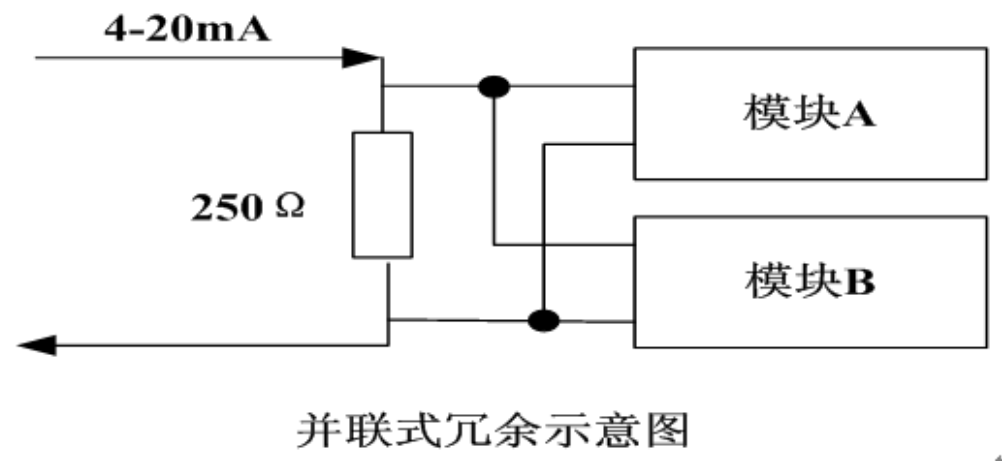
圖4-1-3 I/O模塊并聯(lián)式冗余示意圖
以Yokogawa CS3000、Emerson DeltaV為代表的采用切換式冗余機(jī)制,原理是冗余的模塊內(nèi)藏切換開關(guān),只有主模塊開關(guān)才接通,備用模塊開關(guān)不接通。切換式冗余示意圖如下:
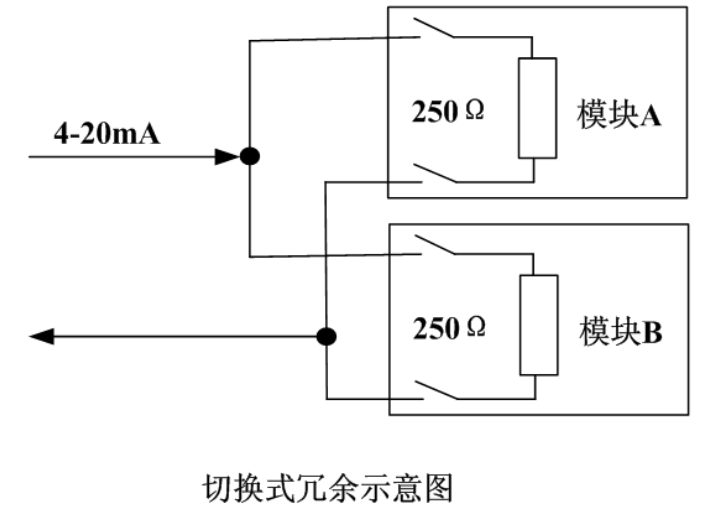
圖4-1-4 I/O模塊切換式冗余示意圖
并聯(lián)式冗余和切換式冗余各有利弊:并聯(lián)式冗余優(yōu)點(diǎn)是不存在切換后重新建立穩(wěn)態(tài)的時(shí)間,響應(yīng)速度快,缺點(diǎn)是共用一個(gè)取樣電阻,危險(xiǎn)集中,一旦該電阻損壞,兩個(gè)模塊都不起作用了。另外取樣電阻同模塊分離,精度和穩(wěn)定性控制難度大。切換式冗余優(yōu)點(diǎn)是危險(xiǎn)分散,沒有共用器件。取樣在模塊內(nèi)部一體化,精度和穩(wěn)定性高。缺點(diǎn)是切換后需要重新建立穩(wěn)態(tài)工作環(huán)境,時(shí)間比并聯(lián)式長。
現(xiàn)場總線通訊模塊主要包括:
1)Serial Card串行通訊模塊,主要用于Modbus等協(xié)議通訊。
2)Foundation FieldBus Card FF總線通訊模塊。
3)ProfiBus DP/PA Card ,用于DP/PA總線通訊。
4)Wireless Communication Card,用于無線儀表通訊。
5)DeviceNet和AS-Interface,工廠自動(dòng)化主流現(xiàn)場總線。
現(xiàn)場總線模塊需要同第三方總線設(shè)備進(jìn)行兼容性測試通過后,才能選型具體總線儀表,否則將有通訊不兼容風(fēng)險(xiǎn)。同傳統(tǒng)儀表不同,總線儀表在使用過程中,與通訊模塊的配合升級將難以避免。因此維護(hù)工作需要較高的水平。
軟件選型
1)組態(tài)管理軟件
組態(tài)軟件用來配置、部署和管理整個(gè)DCS系統(tǒng),承擔(dān)組態(tài)流程中主要的組態(tài)過程。離線組態(tài)軟件包括工程總控、圖形編輯、控制邏輯組態(tài)軟件、報(bào)表組態(tài)軟件等,以及完成工程的編譯、下裝、項(xiàng)目管理、工程管理等功能。組態(tài)管理軟件應(yīng)該符合IEC61131-3的控制算法編程軟件,支持CFC、SFC、LD、ST組態(tài)語言,支持用戶自定義各類功能塊和腳本語言。任何組態(tài)修改均可在線完成,包括對控制算法、硬件配置的增加、刪除、修改,系統(tǒng)數(shù)據(jù)庫、圖形組態(tài)、系統(tǒng)配置等各項(xiàng)組態(tài)內(nèi)容,都可以做到現(xiàn)場不停車無擾下裝與修改,大大提高系統(tǒng)的可維護(hù)性以及可用性。組態(tài)軟件需關(guān)注控制功能的完善程度,如報(bào)警診斷、自定義、自整定、優(yōu)化算法、復(fù)雜算法、行業(yè)應(yīng)用包等。
2)在線運(yùn)行軟件
監(jiān)控系統(tǒng)面向操作者,以模擬流程圖、棒狀圖、數(shù)值表、趨勢曲線、報(bào)表、按鈕、對話框等方式為用戶提供數(shù)據(jù),執(zhí)行操作指令并發(fā)送至現(xiàn)場控制站。監(jiān)控系統(tǒng)面向操作者,以模擬流程圖、棒狀圖、數(shù)值表、趨勢曲線、報(bào)表、按鈕、對話框等方式為用戶提供數(shù)據(jù),執(zhí)行操作指令并發(fā)送至現(xiàn)場控制站。在線允許軟件需關(guān)注支持的系統(tǒng)規(guī)模、人機(jī)界面優(yōu)化性、報(bào)警診斷完善、操作質(zhì)量下發(fā)指令實(shí)時(shí)性、畫面響應(yīng)時(shí)間、歷史存儲數(shù)量和時(shí)間等參數(shù)。
通過監(jiān)控系統(tǒng),操作者和工程師可以完成:監(jiān)控自動(dòng)控制過程,實(shí)時(shí)人工干預(yù),自動(dòng)打印或者按需求打印工作報(bào)表等任何所需資料,還可以通過廠級監(jiān)控的MIS等網(wǎng)絡(luò)將畫面和數(shù)據(jù)提供給管理者。可以完成實(shí)時(shí)數(shù)據(jù)采集、動(dòng)態(tài)數(shù)據(jù)顯示、過程自動(dòng)控制、順序控制、高級控制、報(bào)警和日志檢測、監(jiān)視、操作,可以對數(shù)據(jù)進(jìn)行記錄、統(tǒng)計(jì)、顯示、打印等處理。
3)控制器軟件
用來完成現(xiàn)場信號采集、工程單位變換、控制和聯(lián)鎖控制算法、控制輸出、通過系統(tǒng)網(wǎng)絡(luò)將數(shù)據(jù)和診斷結(jié)果傳送到操作員站等功能。
4)輔助軟件
用于完成DCS系統(tǒng)的一些輔助組態(tài)和系統(tǒng)查詢、管理功能,包括:OPC通訊軟件、歷史離線查詢工具、系統(tǒng)升級工具、軟件版本管理工具、系統(tǒng)仿真軟件、授權(quán)管理工具等。














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論