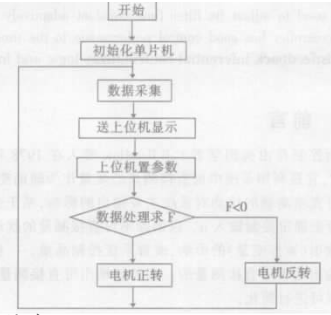
基于STM32F407設計并制作一套簡易旋轉倒立擺及其控制裝置。旋轉倒立擺的結構如圖 1 所 示。電動機 A 固定在支架 B 上,通過轉軸 F 驅動旋轉臂 C 旋轉。擺桿 E 通過轉軸 D 固定
2019-08-26 20:45:23
概述:ET44M210芯片是一款低價格、高性能,采用CMOS工藝制造,具有RISC架構的8位微控制器芯片。ET44M210微處理器采用精簡指令集的結構(RISC),外接6MHz的晶振,除條件轉移指令需要二個時鐘...
2021-04-12 06:14:18
劉洋意法半導體(STMicroelectronics)目前宣布其首批整合其高性能8位架構的超低功耗8位微控制器STM8L系列開始量產。STM8L系列以節省運行和待機功耗為特色,該平臺采用意法半導體
2019-07-24 08:03:04
等突出優點被廣泛應用于家用電器、計算和外設、通訊、工業控制、自動化生產、智能化設備以及儀器儀表等領域,成為科研、教學、工業技術改造最得力的工具。從最初采用普林斯頓結構的簡單微控制器到現在普遍采用哈佛
2019-07-04 06:23:24
系列中已經漸漸的融合進了RISC思想;對于采用RISC指令系統的微控制器來說,更多的做法仍然是針對高性能低功耗的需求對其整個體系架構不斷地進行優化和改善,尤其是流水線結構的改進最為多見。深聯華的89F5162單片機是基于8051兼容流水指令的8位單片機`
2014-01-03 14:45:00
概述:MAXQ613是一款低功耗、16位MAXQ 微控制器 ,設計用于通用 遙控器 、消費類 電子 和白色家電等低功耗產品。器件結合了強大的16位RISC微控制器和集成外設,包括一個通用同步/異步 收發器...
2021-04-13 07:35:16
概述:MAXQ61H采用四面QFN32腳封裝。是一款低功耗、16位MAXQ 微控制器 ,設計用于通用 遙控器 、消費類 電子 和白色家電等低功耗產品。
2021-04-13 07:06:38
概述:MAXQ610是MAXIM公司生產的一款低功耗、16位MAXQ?微控制器,設計用于通用遙控器、消費類電子和白色家電等低功耗產品。 MAXQ610結合了強大的16位RISC微控制器和集成外設,包括兩個US...
2021-04-21 07:47:00
相對較大,因此設計人員需要選擇并應用合適的架構以滿足這些應用的需求。事實證明,多數情況下16位微控制器正是最佳選擇。雖然8位微控制器的功能逐漸強大,但是鑒于處理能力和可尋址存儲器有限,性能上...
2021-11-26 06:26:18
16位Σ-Δ A/D轉換器AD7705與微控制器的接口設計16位Σ-Δ A/D轉換器AD7705與微控制器的接口設計16位Σ-Δ A/D轉換器AD7705與微控制器的接口設計摘要:介紹了16位
2012-08-23 19:56:41
16位的寄存器,但實際上它是由兩個8位的存貯單元組成的,輸出時MSB在前,如果接收微控制器需要LSB在前,例如8051系列,讀取的時候應該分兩次讀,每次讀出8位分別倒序,而不是整個16位倒序。其他
2018-12-18 10:21:14
前一段時間參加了電子設計大賽,做的是旋轉倒立擺,在網上看了看別人的作品,大多數都是簡單的一級倒立擺,現在想嘗試一下做二級倒立擺。看了看該款主控芯片的資源,能滿足該作品的需求,所以最終決定做二級倒立擺,懇請組委會審核!
2013-10-28 10:02:39
正在做一個環形倒立擺(C51單片機控制)!!遇到問題如下 請大家指點迷津{:1:};我用的是10位絕對型倒立擺 ,有10條數據線,輸出格雷碼. 請問這10條數據線是否直接與單片機 IO口相連,連完之后又該如何對這組格雷碼進行檢測并輸出二進制數!!{:21:}大神大神 請幫助一下
2014-07-28 22:03:58
目錄一、倒立擺系統簡介二、二級倒立擺模型構建三、二級倒立擺的線性化模型四、二級倒立擺的狀態空間模型一、倒立擺系統簡介倒立擺控制系統作為實驗裝置在控制理論領域的教學與科研工作中擔任著不可或缺的角色
2021-09-01 07:14:57
國賽c題的倒立擺題目,大家是選什么材料當轉軸D的?滑輪?滑輪會不會太滑,不好控制?還有什么其他好的材料用轉軸的?
2013-09-05 13:54:37
什么是倒立擺?倒立擺該如何去實現呢?
2021-12-23 06:18:33
本文介紹了一種采用PLD和數據通路(datapath)來解放微控制器系統中CPU任務的方案。在大多數微控制器結構中,智能的CPU身邊總會環繞著一系列不可編程的外設。外設的功能有限,通常它們只負責數據
2019-08-16 08:03:34
了更新換代的趨勢。預計在未來的市場中,低階應用將會以8位微控制器為主,而高階應用將會由32位微控制器稱霸。當然,也有可能沖出一個比32位微控制器更強大的產品,如果能夠控制成本,則32位微控制器將面臨很快
2019-06-25 06:19:25
LPC2131 PHILIPS單片16/32位微控制器,詳細介紹,結構框圖,管腳配置,存儲器映射.[hide][/hide]
2011-08-02 10:52:24
海都。不知何故,我知道PIC16F87A(8位微控制器)…現在我想學習和工作16位和32位微控制器。如PIC16F87A,主要根據我的知識使用8位MCU。現在我想繼續使用16位和32位微控制器。請說
2020-03-05 09:08:16
愛特梅爾(Atmel)公司的SMART SAM4C微控制器是系統級芯片解決方案,用于智能電源應用,它是基于兩個高性能的32位ARM Cortex-M4 RISC處理器構建。這些器件運行速度為
2020-11-23 12:19:07
ST32位最小系統微控制器STM32F401的知識點分享
2021-12-15 07:31:29
在各行業領域。意法半導體MCU型號STM32F030K6T6微控制器采用高性能的內核M0的48兆赫茲32位RISC
2021-07-23 10:11:49
硬件需求8、低功耗模式二、STM32庫函數及程序開發1、STM32固件庫二、搭建開發環境及如何開發一、STM32微控制器概述STM32系列32位閃存微控制器使用ARM公司的Cortex-M3內核,按...
2021-11-26 07:56:40
STM32系列32位微控制器有哪些特點?STM32系列32位微控制器是如何進行劃分的?分為哪幾類?
2021-09-22 07:08:42
STM8系列微控制器,8位微控制器平臺基于高性能8位內核和先進外設集,在8位單片機行業中占據著舉足輕重的市場地位,該平臺采用意法半導體專有的130 nm嵌入式非易失性存儲器技術制造而成。STM8
2019-07-10 07:00:24
的、不穩定的,非線性系統,我做的旋轉倒立擺也是四年前2013全國大學生電子設計競賽的一道賽題,實現倒立是最基本的一個要求。利用IntoRobot Neutron,采集ADC,利用 PWM控制直流電機,利用外部
2017-06-29 15:59:40
其操作及其庫函數,驗證其性能,我選擇了倒立擺這個經典的控制系統。項目中用到的資源: 定時器——Neutron提供最多十個由FreeRTOS接管的定時器。ADC模數轉換——Neutron精度為12位
2017-07-14 17:31:27
本帖最后由 小Z 于 2014-3-13 11:38 編輯
《ARM Cortex微控制器教程》作 者:馬忠梅,徐琰,葉青林 編著內容簡介本書是32位微控制器教材,基于ARM Cortex
2014-03-13 11:35:46
和指令集特征三個方面:一,硬件結構是一個單芯片CPU,而則在一塊集成電路芯片中集成了CPU和其他電路,構成了一個完整的微型計算機系統。除了CPU,微控制器還包括RAM、ROM、一個串行接口、一個并行接口
2017-11-17 14:10:37
一級倒立擺的Simulink仿真 單級倒立擺穩定控制 直線一級倒立擺系統在忽略了空氣阻力及各種摩擦之后,可抽象成小車和勻質擺桿組成的系統,如圖1所示。m g?桿長為 ?2u圖1 直線一級倒立擺系統圖
2021-09-01 06:45:42
什么時候適合采用CPLD替代微控制器?什么時候可以采用CPLD作為微控制器的輔助器件?
2021-04-28 06:16:59
系列8位微控制器等。在16位RISC架構的微控制器中,Maxim公司推出的MAXQ系列微控制器以其高性能、低功耗和卓越的代碼執行效率,成為許多需要高精度混合信號處理以及便攜式系統和電池供電系統的理想
2011-11-14 14:30:49
定時器,實時時鐘,外部事件計數器,脈沖調制模擬信號處理: 運算放大器,模擬比較器輸入輸出: 通用數字輸入輸出電路,并行存儲接口圍繞一個16位微控制器設計的這個傳感器子系統支持電路微控制器包含了各種不能
2022-04-11 10:14:06
計算機的8位微控制器。采用這種矢量計算機,執行FOC功能時,只需占用CPU約一半的處理性能,這在整個業界也是獨一 無二的。FOC功能——在XC886/888、XC878和即將面世的XC83x產品中采用——將
2018-12-04 09:58:29
你們做倒立擺時對倒立擺進行建模了嗎?感覺數學水平不夠,建模有點難。但是做倒立擺時對PID的整定不建模怎么辦,就通過不斷的試嗎?有在搞這個的么,求經驗!!
2015-07-29 18:29:44
**PacketTracer模擬器物聯網教程2—MCU微控制器編程**一、目的使用MCU微控制器實現對物聯網設備的控制二、設備1.臺燈2.SBC-PT微控制器3.Push Button按鈕用到的線
2021-11-01 07:36:22
最近小弟在做一個小車倒立擺的結構,但是電機要通過計算去選取,大佬們有什么好的建議嗎?另外還想做一下機械運動仿真,因為實在是不懂,所以請問用proe能做出倒立擺結構的運動仿真嗎?
2020-04-23 00:52:59
在調節倒立擺時如何將精密電位器的角度值與電機的pwm調節聯系起來,想通過增量式pid算法調節倒立擺。還有,pid參數調節有沒有相關軟件,麻煩推薦一下。O(∩_∩)O謝謝!!!
2017-07-27 10:47:46
倒立擺分析、建模與仿真引言倒立擺是機器人學中一個非常重要的模型,火箭、導彈、雙足機器人、四足機器人,基本都是倒立擺的變形。問題描述關于倒立擺的問題描述如下:如圖所示的倒立擺系統。擺的關節連接在一個可
2021-09-07 06:59:42
AD7705的內部結構16位Σ-Δ A/D轉換器AD7705與微控制器的接口設計
2021-04-08 06:30:58
最近需要設計單級倒立擺,可是對此一竅不通,有知道或者設計過的的大神么?求指導!!!
2014-03-22 18:50:20
;對于采用RISC指令系統的微控制器來說,更多的做法仍然是針對高性能低功耗的需求對其整個體系架構不斷地進行優化和改善,尤其是流水線結構的改進最為多見。本文正是在種形勢下提出的,主要討論RISC體系架構的8
2011-04-15 09:36:28
Brett Novak 營銷經理 德州儀器 (TI)簡介現在,越來越多的設計師開始轉向電子微控制器,以在電機控制和數字電源系統中控制功率級。 使用微控制器(例如德州儀器 (TI) 的 C2000
2019-07-19 07:38:46
在很多嵌入式控制系統中,系統既要完成大量的信息采集和復雜的算法,又要實現精確的控制功能。采用運行有嵌入式Linux操作系統的ARM9微控制器完成信號采集及實現上層控制算法,并向DSP芯片發送上層算法得到控制參數,DSP芯片根據獲得的參數和下層控制算法實現精確、可靠的閉環控制。
2019-08-19 06:29:34
倒立擺制作全過程最近在練習pid的控制算法,就選用了2013年的電子設計國賽題目:倒立擺。首先給你們看看我的成果注意哦:倒立擺不是靠上面黃色的傳感器保持平衡的,而是通過下面的電機左右扭動使得擺桿不掉
2022-01-14 07:22:02
目錄物理設置創建世界框架和基本配置組裝底盤和推車擺放在一對手推車連接到擺選擇用于控制器和角度轉換的輸出為擺錘和手推車創造原型閉環設置控制器實施物理設置在本節中,我們將展示如何使用Simscape
2021-07-07 06:16:10
理論到實踐的轉化提供了橋梁。因此,對倒立擺系統的研究在理論上和方法論上均具有深遠意義。本文針對本科自動控制原理課程設計中倒立擺擺桿偏角控制器的在線仿真存在:手扶擺桿起擺不安全,單變量擺桿角度控制器無法
2020-04-01 07:11:00
的是CotexM4,STM32F103RBT6采用的是CotexM3,都是采用三級流水線結構。STM32G431RBT6數據手冊里面可以查到擁有128KB得Flash。嵌入式競賽平臺上板載的微控制器提供了 2 個逐次逼近模擬數字轉換器,在12位、右對齊模式下,參考電壓3.3V,當ADC數據寄存器中的值為0x381
2021-11-08 06:09:00
概述:MAXQ61C是一款低功耗、16位MAXQ 微控制器 ,設計用于通用遙控器 、消費類電子和白色家電等低功耗產品。器件結合了功能強大的16位RISC微控制器和集成外設,包括兩個通用同步/異步接收- 發送器 ...
2021-04-13 07:16:02
怎么用單片機很好控制倒立擺呢
2015-08-01 15:38:31
1 緒論1.1倒立擺系統簡介倒立擺系統是一種很常見的又和人們的生活密切相關的系統,它深刻揭示了自然界一種基本規律,即自然不穩定的被控對象,通過控制手段可使之具有良好的穩定性。倒立擺系統是一個非線性
2021-09-15 07:23:55
復雜問題的設計選項已開始嶄露頭角——即模擬元件與ARM?微控制器內核的智能集成。這種方案與傳統模擬集成的區別在于,新方案具有超高的性能,還經過了多種優化,以解決具體的系統級問題。雖然每個市場對這些提升領域
2018-10-15 09:55:02
有什么方法可以引進微控制器系統級芯片嗎?
2021-04-30 06:57:41
模糊控制倒立擺程序
2018-10-04 10:42:46
瑞薩16位微控制器跟MSP430以及80196有什么區別?共同點是什么?
2015-01-28 18:10:39
#具體操作寫好倒立擺程序的關鍵是確定pid算法的程序和參數值。我根據網上查找的資料寫了用stm32F407控制倒立擺的pid程序,現在我將程序分享給大家。我的程序主要是根據位置式離散pid公式pwm
2022-01-14 07:33:37
程度,有時需要增加一個微控制器(8/16位)。采用自主微控制器可提高控制單元的功能可靠性。軟件可分別監控微控制器和系統。系統通電后,軟件會對微控制器硬件部件(包括閃存故障修正)、操作碼解碼器、中斷仲裁
2018-12-06 10:03:58
一、倒立擺系統的研究目的和意義倒立擺控制系統(InvertedPendulumSystem簡稱IPS)是一個復雜的、不穩定的、非線性系統,是進行控制理論教學及開展各種控制實驗的理想實驗平臺。倒立擺
2021-09-01 07:04:20
簡易旋轉倒立擺及控制裝置中如何使直流電機加快轉速?
2013-09-04 16:01:18
簡易旋轉擺倒立控制裝置報告中的擺桿狀態檢測,是要測什么啊?!具體點
2013-09-05 10:10:13
羅姆推出支持近距離無線通信NFC*1的車載無線充電解決方案,采用意法半導體NFC讀取器IC和8位微控制器。~將Qi標準和NFC技術相結合,助力車載應用的技術創新~本解決方案由羅姆開發中的車載級(滿足
2019-04-25 22:58:14
萌新求助,求大佬分享一級倒立擺MATLAB仿真程序
2021-11-01 07:32:44
微控制器到現在普遍采用哈佛總線結構的RISC微控制器,微控制器取得了飛速的發展[1]。 8位微控制器是目前應用數量最大的微控制器,也是目前最多公司致力耕耘的市場;其市場及價格競爭都極為激烈,各種多功能
2019-06-24 07:35:21
請問一下倒立擺系統的原理是什么?
2021-10-29 07:05:38
想學習倒立擺,誰有程序借來學習學習
2015-06-09 08:29:17
由運放組成的二級放大電路,級間電阻如何選擇?第二級放大16倍。電阻該怎么選?是阻抗匹配嗎?要怎么匹配?
2018-08-04 17:33:35
簡介 現在,越來越多的設計師開始轉向電子微控制器,以在電機控制和數字電源系統中控制功率級。 使用微控制器(例如德州儀器 (TI) 的 C2000? Piccolo? 微控制器)的集成模擬比較器功能
2019-07-17 07:27:22
、MC9S08FL16/8系列MCU。這些高度集成微控制器產品采用了8位 HCS08 中央處理單元 (CPU),利用小型封裝、低管腳數的設計來提高器件的靈活性。
2019-07-18 08:18:56
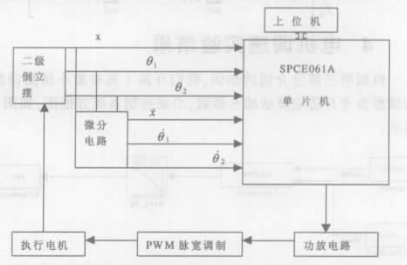
本文簡要說明了二級倒立擺系統及其建模,并分析了這個系統的特點。著重于建立一個單片機系統,在狀態反饋的基礎上實現對倒立擺的控制。關鍵詞:倒立擺 單片機 狀態反饋
2009-06-26 10:32:13 49
49 本文在MATLAB 環境下建立了二級倒立擺的半物理實時仿真模型,并應用線性二次型最優控制策略,設計了一個二級倒立擺LQR 控制器。在實驗中,運行該半實物仿真模型,成功的
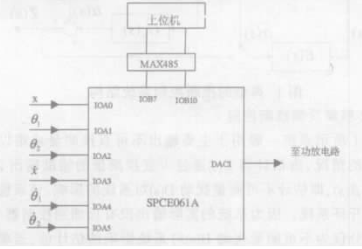
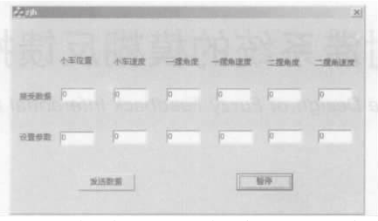
2009-07-31 08:51:3127 本文介紹了一種基于SPCE061A 單片機的二級倒立擺控制系統。主要闡述了狀態空間法在本系統中的應用以及功能設計,并簡要介紹了系統的軟件設計思路。關鍵詞:單片機; 狀
2009-08-04 08:42:0925 倒立擺系統是多變量、非線性、強耦合的控制系統。采用模糊控制理論研究二級倒立擺控制問題。運用最優控制方法設計融合函數以降低模糊控制器的維數,減少模糊控制規則數,
2010-12-29 17:29:0846 引言
倒立擺系統在控制理論研究中是一種較為理想的實驗裝置。倒立擺系統可以用多種理論和方法來實現其穩定控制,如PID、自適應、狀態反饋、智
2009-01-01 21:05:33 712
712 
二級倒立擺的模糊控制研究
1 引言
在控制理論發展的過程中,某一理論的正確性及實際應用中的可行性都需要一個按其理論設計的控制器控制一個
2009-12-23 09:53:182265 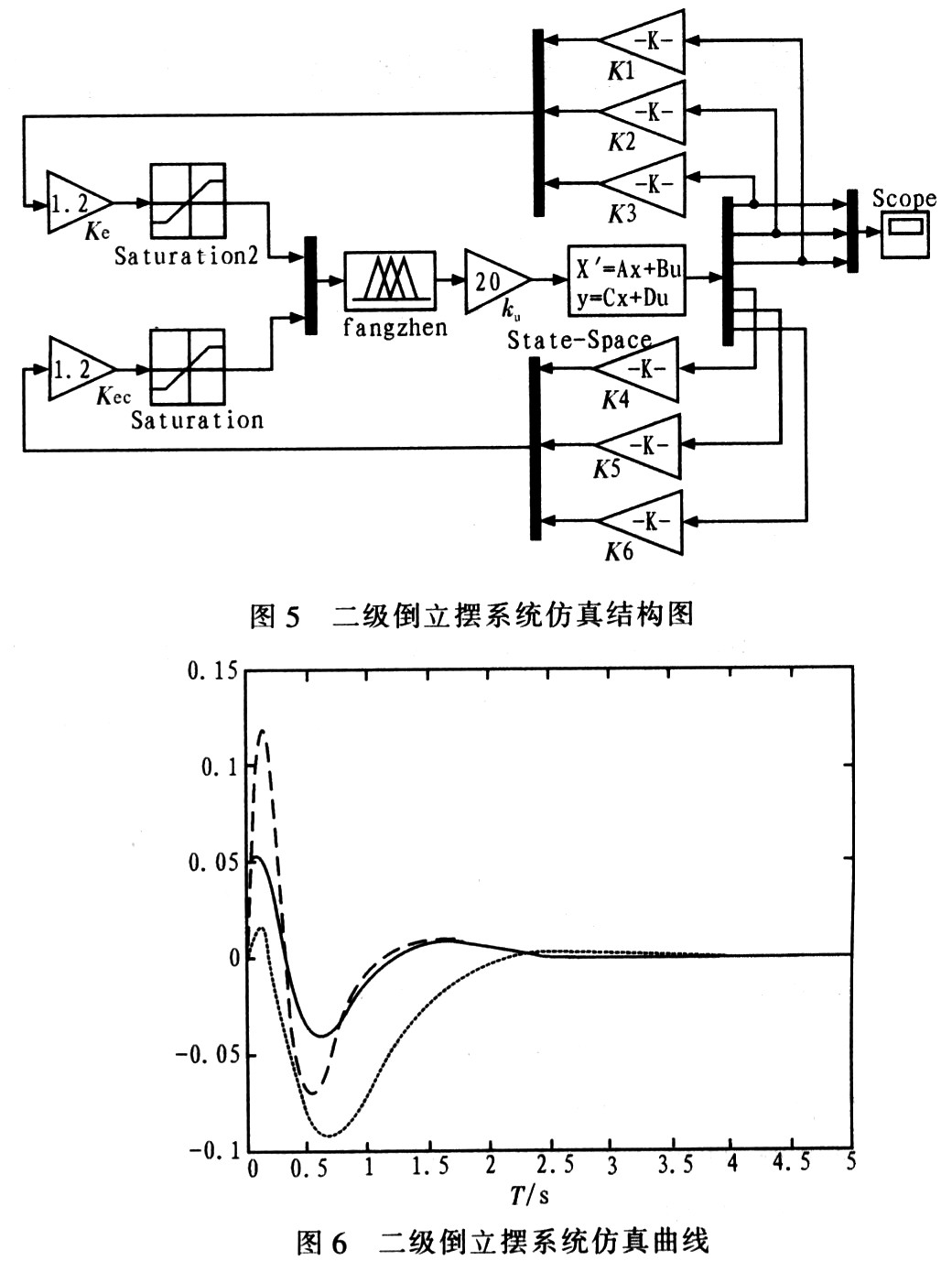
在對 二級倒立擺 系統的動力學方程進行建模的基礎上將其轉化為線性定常系統的狀態控制問題,提出了基于matlab的二級倒立擺控制系統
2011-07-06 18:05:25111 為了實現一級倒:芷擺系統自擺起和穩定控制,該文采用了最優控制與PID控制相結合的控制方法。首先,采用BangBang控制理論設計開環時間最優控制器,實現倒立擺的平穩快速擺起,同
2012-01-18 15:00:3492 為實現二級倒立擺系統的實時穩定控制,以深圳固高直線二級倒立擺裝置作為控制對象,在MATLAB環境下,利用基于二次型最優控制理論的線性二次型(Linear Quadratic Regulator,LQR)最優控制器
2012-01-18 15:07:3053 倒立擺系統是一種典型的控制系統模型,能夠將實際與理論相結合,可以開發出新的控制算法來應用在系統模型之上。采用模糊控制算法研究二級倒立擺系統的控制問題,設計模糊控制
2012-08-29 15:04:08111 為進行性線控制器的設計首先需要對被控制系統進行建模.二級倒立擺系統數學模型的建立
2016-06-14 15:29:5616 本文介紹了一種簡易環形倒立擺控制系統的設計實現
2016-08-23 16:27:2420 模糊趨近律滑模變結構的二級倒立擺系統控制仿真_張志強
2017-01-30 23:17:311 通過對一階旋轉倒立擺系統原理的分析,選用單片機作為控制器,直流電機作為執行器,電位器式角度傳感器作為反饋環節,采用PID控制算法設計實現了一階旋轉倒立擺控制系統。實驗結果表明該系統在穩定的基礎上具有
2017-10-19 15:21:0957 針對存在模型參數不確定性和外部擾動的直線型二級倒立擺系統的穩擺控制問題,對如何實現倒立擺系統魯棒穩定的同時,還保證其達到期望的最優控制性能和H性能指標的穩定性控制問題進行了研究。基于狀態反饋
2018-03-06 14:11:581
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論