顧名思義,絕對(duì)編碼器會(huì)直接輸出正在測(cè)量的軸的確切位置。每個(gè)旋轉(zhuǎn)點(diǎn)都具有唯一的位置值或數(shù)據(jù)字,并在隨軸一起旋轉(zhuǎn)的碼盤上編碼。碼盤上唯一代碼的數(shù)量決定了位置的表示精度。編碼器一旦開啟,便立即使用光
2019-01-17 08:59:00 8161
8161 ● 1602 LCD顯示屏 ● 連接電線 ● 面包板 旋轉(zhuǎn)編碼器 旋轉(zhuǎn)編碼器(Rotary Encoder),也稱為軸編碼器,是一種機(jī)電設(shè)備,可將軸或軸的角位置或運(yùn)動(dòng)轉(zhuǎn)換為模擬或數(shù)字輸出信號(hào)。旋轉(zhuǎn)編碼器有兩種主要類型:絕對(duì)式和增量式。絕對(duì)值編碼器的輸出指示當(dāng)前軸位置,從而使其成為角度
2020-10-26 15:47:247056 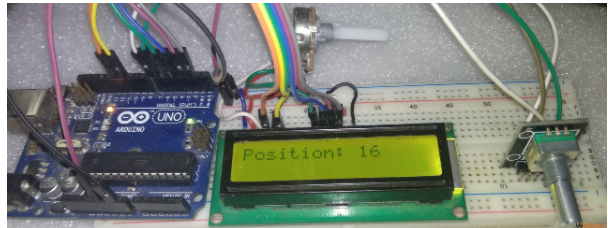
絕對(duì)編碼器會(huì)直接輸出正在測(cè)量的軸的確切位置。每個(gè)旋轉(zhuǎn)點(diǎn)都具有唯一的位置值或數(shù)據(jù)字,并在隨軸一起旋轉(zhuǎn)的碼盤上編碼。碼盤上唯一代碼的數(shù)量決定了位置的表示精度。編碼器一旦開啟,便立即使用光學(xué)、電容式或磁性
2019-08-26 10:15:198889 大家有沒有用51單片機(jī)寫過三相8線即A A- B B- Z Z- VCC GND旋轉(zhuǎn)編碼器的程序,求相應(yīng)的參考程序,先謝謝了
2016-05-29 20:45:37
我現(xiàn)在想買一個(gè)旋轉(zhuǎn)編碼器,用來反饋電機(jī)的位置(只是反饋電機(jī)的位置信號(hào),并不是驅(qū)動(dòng)電機(jī),因?yàn)槲矣?b class="flag-6" style="color: red">旋轉(zhuǎn)變壓器跟驅(qū)動(dòng)器來驅(qū)動(dòng)電機(jī),只是想用電機(jī)的位置信號(hào)),但是旋轉(zhuǎn)編碼器的輸出信號(hào)是方波信號(hào),我應(yīng)該怎么處理成正弦波信號(hào)呢?比如說轉(zhuǎn)一轉(zhuǎn)輸出一個(gè)正弦波,先謝謝大家了。
2017-07-13 10:17:04
fpga初學(xué)者現(xiàn)在要用到旋轉(zhuǎn)編碼器但編碼器順時(shí)針和逆時(shí)針轉(zhuǎn)時(shí) out A 和out B 有一個(gè)相位差圖 1給出了光電編碼器的輸出信號(hào) , 對(duì)于差分輸出型有六個(gè)通道輸出信號(hào) : A、 ? A、 B
2013-12-30 22:27:25
旋轉(zhuǎn)編碼器是一種經(jīng)過驗(yàn)證的流行解決方案,用于測(cè)量旋轉(zhuǎn)軸的速度,運(yùn)動(dòng)方向或位置。有幾種不同的類型,主要的兩種是絕對(duì)編碼器和增量編碼器。是如何工作的?有什么不同?如何為應(yīng)用選擇合適的類型?
2021-01-01 07:46:31
旋轉(zhuǎn)編碼器的主要原理是什么?
2022-01-21 07:08:12
在數(shù)字時(shí)代,需要快速高效地測(cè)量電機(jī)或旋轉(zhuǎn)儀器旋鈕上的機(jī)械軸的旋轉(zhuǎn)。諸如電位計(jì)和旋轉(zhuǎn)開關(guān)之類的模擬方法正在被可將旋轉(zhuǎn)運(yùn)動(dòng)直接數(shù)字化的旋轉(zhuǎn)編碼器所取代,但設(shè)計(jì)人員需要能夠理解各種編碼器類型之間的差異,并
2021-02-22 06:09:31
信號(hào)。該信號(hào)經(jīng)后繼電路處理后,輸出脈沖或代碼信號(hào)。其特點(diǎn)是體積小,重量輕,品種多,功能全,頻響高,分辨能力高,力矩小,耗能低,性能穩(wěn)定,可靠使用壽命長(zhǎng)等特點(diǎn)。1、增量式編碼器 增量式編碼器軸旋轉(zhuǎn)時(shí),有相應(yīng)的相位輸出。其旋轉(zhuǎn)方向的判別和脈沖數(shù)量的增減,需借助后部的判...
2021-07-06 07:56:36
深入理解Android
2012-08-20 15:30:08
這里有三個(gè)對(duì)深入理解C語言的資料,覺得不錯(cuò),分享一下
2014-08-07 21:37:55
時(shí)鐘系統(tǒng)是處理器的核心,所以在學(xué)習(xí)STM32所有外設(shè)之前,認(rèn)真學(xué)習(xí)時(shí)鐘系統(tǒng)是必要的,有助于深入理解STM32。下面是從網(wǎng)上找的一個(gè)STM32時(shí)鐘框圖,比《STM32中文參考手冊(cè)》里面的是中途看起來清晰一些:重要的時(shí)鐘:PLLCLK,SYSCLK,HCKL,PCLK1,...
2021-08-12 07:46:20
的前生今世感興趣,建議仔細(xì)閱讀《嵌入式操作系統(tǒng)史話》這個(gè)連載的文章,作者何小慶教授花了很多精力編寫了這組資料。深入理解和實(shí)現(xiàn)RTOS_連載2_多任務(wù)機(jī)制概述在前面我們?cè)榻B了多任務(wù)系統(tǒng)是如何演化的。和前后
2014-05-29 11:20:54
,其中的每個(gè)任務(wù)都專注自己處理的問題,而這些任務(wù)間則需要處理一下彼此的溝通問題......深入理解和實(shí)現(xiàn)RTOS_連載3_多任務(wù)機(jī)制設(shè)計(jì)前面我們已經(jīng)介紹過了在單核處理器上的多任務(wù)機(jī)制的基本知識(shí)。如果讀者
2014-05-30 01:02:26
深入理解計(jì)算機(jī)系統(tǒng)第9章 虛擬存儲(chǔ)器
2019-06-25 09:49:40
相比傳統(tǒng)的光學(xué)編碼器,磁性編碼器有哪些優(yōu)點(diǎn)?磁性編碼器技術(shù)在電機(jī)的旋轉(zhuǎn)位置反饋中有什么應(yīng)用?磁性編碼器有哪些短板?
2021-07-13 08:10:07
為了實(shí)現(xiàn)多對(duì)極磁電式軸角編碼器的高分辨率絕對(duì)式檢測(cè)并降低其成本,基于改進(jìn)格雷碼構(gòu)建了一種新型多極磁電軸角編碼器模型,提出一種基于校準(zhǔn)查表的信號(hào)處理方式,以消除磁場(chǎng)非線性和裝配誤差對(duì)測(cè)量精度
2010-06-02 10:04:24
絕對(duì)編碼器會(huì)直接輸出正在測(cè)量的軸的確切位置。每個(gè)旋轉(zhuǎn)點(diǎn)都具有唯一的位置值或數(shù)據(jù)字,并在隨軸一起旋轉(zhuǎn)的碼盤上編碼。碼盤上唯一代碼的數(shù)量決定了位置的表示精度。編碼器一旦開啟,便立即使用光學(xué)、電容式或磁性
2018-12-20 16:31:09
做到多圈旋轉(zhuǎn)位置測(cè)量。增量式編碼器是直接利用光電轉(zhuǎn)換原理輸出三組方波脈沖A、B和Z相。由一個(gè)中心有軸的光電碼盤,其上有環(huán)形通、暗的刻線,有光電發(fā)射和接收器件讀取,獲得兩組正弦波信號(hào)組合成A、B,每個(gè)
2023-04-20 16:19:54
結(jié)構(gòu)連成一體的精密組合的器件,充分利用旋轉(zhuǎn)增量值編碼器以轉(zhuǎn)動(dòng)時(shí)輸出的脈沖,通過計(jì)數(shù)儀表計(jì)算出位置,架構(gòu)簡(jiǎn)單,安裝方便;絕對(duì)值拉繩位移編碼器采用金屬外殼,材料為進(jìn)口鋁合金經(jīng)過精密加工而成,表面則通過
2018-11-12 10:58:42
有一臺(tái)異步電機(jī)55KW安裝歐姆龍的差分編碼器CWZ1X,編碼器安裝在軸端托盤架子上,用三條螺栓固定在電機(jī)上,托盤和電機(jī)絕對(duì)是同心的,編碼器安裝在托盤中間小軸上,用三個(gè)螺絲固定在托盤上,電機(jī)伸出軸端
2024-03-06 17:34:21
實(shí)際上就是光電編碼器,分為增量式和絕對(duì)式,較其它檢測(cè)元件有直接輸出數(shù)字量信號(hào),慣量低,低噪聲,高精度,高分辨率,制作簡(jiǎn)便,成本低等優(yōu)點(diǎn)。增量式編碼器結(jié)構(gòu)簡(jiǎn)單,制作容易,一般在碼盤上刻A、B、Z三道
2012-02-24 22:03:25
、絕對(duì)式以及混合式三種。增量式編碼器:增量式編碼器是直接利用光電轉(zhuǎn)換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90度,從而可方便的判斷出旋轉(zhuǎn)方向,而Z相為每轉(zhuǎn)一個(gè)脈沖,用于基準(zhǔn)點(diǎn)定位。它
2019-10-13 08:00:00
一、編碼器的分類根據(jù)檢測(cè)原理,編碼器可分為光學(xué)式、磁式、感應(yīng)式和電容式,根據(jù)其刻度方法及信號(hào)輸出形式,可分為增量式、絕對(duì)式以及混合式三種。1、增量式編碼器 增量式編碼器是直接利用光電轉(zhuǎn)換原理輸出三
2022-01-20 06:47:46
、絕對(duì)式以及混合式三種。 1.1 增量式編碼器 增量式編碼器是直接利用光電轉(zhuǎn)換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90度,從而可方便的判斷出旋轉(zhuǎn)方向,而Z相為每轉(zhuǎn)一個(gè)脈沖,用于基準(zhǔn)點(diǎn)
2017-11-24 19:00:47
AS5048A-HTSP 14位絕對(duì)式旋轉(zhuǎn)編碼器IC
2016-11-07 13:24:08
空心軸增量式編碼器 軸增量式編碼器輪轂軸增量式編碼器無軸承增量式編碼器套件/模塊化增量式編碼器光學(xué)增量式編碼器磁增量式編碼器危險(xiǎn)等級(jí)遞增編碼器軸絕對(duì)編碼器輪轂軸絕對(duì)編碼器空心軸絕對(duì)編碼器光學(xué)絕對(duì)編碼器磁絕對(duì)編碼器微型旋轉(zhuǎn)編碼器非接觸式旋轉(zhuǎn)編碼器
2020-07-17 09:54:48
輸出信號(hào)),從而可以方便地判斷出旋轉(zhuǎn)方向。同時(shí)還有用作參考零位的Z相標(biāo)志(指示)脈沖信號(hào),碼盤每旋轉(zhuǎn)一周,只發(fā)出一個(gè)標(biāo)志信號(hào)。標(biāo)志脈沖通常用來指示機(jī)械位置或?qū)Ψe累量清零。增量式光電編碼器主要由光源
2021-05-17 13:20:52
老師VS嵌入式LINUX應(yīng)用開發(fā)完全手冊(cè)【高手問答】第11期——與張飛老師一起成為硬件電路設(shè)計(jì)的expert【高手問答】第10期——宋雪松老師l手把手教你學(xué)51單片機(jī)【高手問答】第9期——張工帶你玩轉(zhuǎn)
2014-11-21 14:47:53
***********************Elecfans高手問答往期回顧:【高手問答】12—韋東山老師VS嵌入式LINUX應(yīng)用開發(fā)完全手冊(cè)【高手問答】11——與張飛老師一起成為硬件電路設(shè)計(jì)的expert【高手問答】第10期—宋雪松老師l手把手
2014-06-30 16:37:03
————————————————————————————————————————往期回顧【高手問答】第19期——看sushu如何在三年內(nèi)精通LabVIEW數(shù)據(jù)庫開發(fā)【高手問答】第18期——9年IC布局工程師來做客,聊聊PADS、信號(hào)完整性【高手問答】第17期——小梅哥和你一起深入
2015-01-15 15:30:03
—韋東山老師VS嵌入式LINUX應(yīng)用開發(fā)完全手冊(cè)【高手問答】11——與張飛老師一起成為硬件電路設(shè)計(jì)的expert【高手問答】第10期—宋雪松老師l手把手教你學(xué)51單片機(jī)【高手問答】第9期——張工帶你玩轉(zhuǎn)
2014-07-07 14:30:15
`STM32硬件問答高手問答第5期 小編導(dǎo)讀:本期高手問答(7月28~8月4日)我們請(qǐng)來了@1402609807為大家解答關(guān)于STM32硬件方面的問題。杜工簡(jiǎn)介: 杜工是一個(gè)不怎么愛說話工程師
2014-07-28 10:36:42
張工帶你玩轉(zhuǎn)STM32問答高手問答第9期小編導(dǎo)讀: 一周一期的高手問答,又在周一與大家相見了。本期(8.25~8.31)的主題是與STM32相關(guān)的問答。我們請(qǐng)到了擁有豐富經(jīng)驗(yàn)的張工。簡(jiǎn)介: 張工
2014-08-25 10:20:32
[導(dǎo)讀] 從這篇文章開始,將會(huì)不定期更新關(guān)于嵌入式C語言編程相關(guān)的個(gè)人認(rèn)為比較重要的知識(shí)點(diǎn),或者踩過的坑。為什么要深入理解棧?做C語言開發(fā)如果棧設(shè)置不合理或者使用不對(duì),棧就會(huì)溢出,溢出就會(huì)遇到無法
2022-02-15 06:09:14
光柵編碼器可分為兩大類,一是旋轉(zhuǎn)編碼器,用于轉(zhuǎn)角、轉(zhuǎn)速的測(cè)量;二是直尺型編碼器,用于直線位移、運(yùn)動(dòng)速度的測(cè)量。在旋轉(zhuǎn)編碼器中,又可分為絕對(duì)式編碼器和增量式編碼器。
2019-10-18 09:03:30
最近想測(cè)電機(jī)轉(zhuǎn)動(dòng)的角度,第一想到了絕對(duì)式編碼器。。但是沒用過,所以不懂那款絕對(duì)式編碼器可以跟51單片機(jī)連接到一起使用。。求做過或者有經(jīng)驗(yàn)的大神給個(gè)用過的例子參考下。或者給個(gè)建議,我該選用什么型號(hào),什么樣子的編碼器。。。該怎么測(cè)側(cè)角度。。
2016-12-30 20:12:21
5腳增量式旋轉(zhuǎn)編碼器,想測(cè)轉(zhuǎn)角和轉(zhuǎn)數(shù),完全沒有頭緒,接線也有疑問,知道怎么弄的快來!!
2016-08-28 11:53:30
請(qǐng)問有沒有了解增量式旋轉(zhuǎn)編碼器的高手,幫我解決一下一直困擾我問題:1.關(guān)于編碼器內(nèi)部的內(nèi)插細(xì)分 有的碼器的內(nèi)插細(xì)分值有1,2,4,6,10,16等,每一個(gè)旋轉(zhuǎn)編碼器有一個(gè)固定的內(nèi)插細(xì)分值還是有多個(gè)
2011-10-16 14:30:25
增量式旋轉(zhuǎn)編碼器怎么用的??怎么把它和減速步進(jìn)電機(jī)用51單片機(jī)聯(lián)系起來啊??
2015-07-30 21:12:59
閱讀目錄一、增量式旋轉(zhuǎn)編碼器二、硬件設(shè)計(jì)三、軟件設(shè)計(jì)Development kit:MDK5.14IDE:UV4MCU:STM32F103C8T6回到頂部一、增量式旋轉(zhuǎn)編碼器1、簡(jiǎn)介編碼器
2021-12-01 07:57:34
增量式編碼器與絕對(duì)值式編碼器的區(qū)別是什么?直流電機(jī)和交流電機(jī)的區(qū)別是什么?
2021-10-12 06:17:13
計(jì)數(shù)脈沖,計(jì)數(shù)器對(duì)脈沖的個(gè)數(shù)進(jìn)行加減增量計(jì)數(shù),從而判斷編碼盤旋轉(zhuǎn)的相對(duì)角度。為了得到編碼器轉(zhuǎn)動(dòng)的絕對(duì)位置,還須設(shè)置一個(gè)基準(zhǔn)點(diǎn),如圖中的“零位標(biāo)志槽”。為了判斷編碼盤轉(zhuǎn)動(dòng)的方向,實(shí)際上設(shè)置了兩套光電元件
2016-09-12 13:43:01
如何使用高精度旋轉(zhuǎn)編碼器BH60測(cè)量步進(jìn)電機(jī)轉(zhuǎn)動(dòng)角度?
2021-10-28 06:35:20
如何更加深入理解MOSFET開關(guān)損耗?Coss產(chǎn)生開關(guān)損耗與對(duì)開關(guān)過程有什么影響?
2021-04-07 06:01:07
為什么要深入理解棧?做C語言開發(fā)如果棧設(shè)置不合理或者使用不對(duì),棧就會(huì)溢出,溢出就會(huì)遇到無法預(yù)測(cè)亂飛現(xiàn)象。所以對(duì)棧的深入理解是非常重要的。注:動(dòng)畫如果看不清楚可以電腦看更清晰啥是棧先來看一段動(dòng)畫:沒有
2022-02-15 07:01:00
本文針對(duì)旋轉(zhuǎn)編碼器在工業(yè)現(xiàn)場(chǎng)中的應(yīng)用,基于LPCI768硬件平臺(tái),設(shè)計(jì)出一種旋轉(zhuǎn)編碼器采集模塊,該模塊內(nèi)部具有高精度分析、整形、解碼電路,可同時(shí)對(duì)2路編碼器輸入信號(hào)進(jìn)行分析、解碼。
2021-05-21 06:47:35
跟大家一起探討一下。平時(shí)我們經(jīng)常會(huì)聽客戶提到拉線式編碼器你的精度是多少,,此時(shí)客戶所說的精度有很多理解,有可能是拉線式位移傳感器的線性精度或者說是拉線位移傳感器的誤差,它是一個(gè)固定的百分比,我們星峰
2020-06-11 10:23:54
描述這是一種增量式旋轉(zhuǎn)編碼器,使用非接觸式磁性感應(yīng)來檢測(cè)旋轉(zhuǎn)速度和方向。兩個(gè)霍爾效應(yīng)傳感器可測(cè)量 66 極環(huán)形磁體并輸出兩個(gè)正交信號(hào)。此汽車級(jí)解決方案具有低成本特點(diǎn),由于使用固態(tài)檢測(cè),不受物理磨損
2018-10-10 09:22:57
我用labview對(duì)海德漢絕對(duì)式編碼器進(jìn)行編程,設(shè)定一個(gè)幾毫秒的采樣周期,將讀取到的位置值經(jīng)過計(jì)算轉(zhuǎn)化成速度值,并有過零判斷,但是讀出的轉(zhuǎn)速值波動(dòng)較大,海德漢25位精度的,本身精度特別高,但是測(cè)試幾百轉(zhuǎn)的轉(zhuǎn)速波動(dòng)能達(dá)到幾十轉(zhuǎn),請(qǐng)問大家遇到過這種情況嗎?有什么可能的原因嗎?萬分感激。
2017-05-05 22:40:54
是工業(yè)中常用的電機(jī)定位設(shè)備,可以精確的測(cè)試電機(jī)的角位移和旋轉(zhuǎn)位置。 二、編碼器分類 按照工作原理編碼器可分為增量式和絕對(duì)式兩類。增量式編碼器是將位移轉(zhuǎn)換成周期性的電信號(hào),再把這個(gè)電信號(hào)轉(zhuǎn)變成計(jì)數(shù)脈沖
2016-06-27 16:43:31
用于旋轉(zhuǎn)范圍360度以內(nèi)的測(cè)量,稱為 單圈絕對(duì)式編碼器。優(yōu)點(diǎn)為:調(diào)節(jié)精度(精確度)高,沒有噪聲,有極長(zhǎng)的工作壽命,無機(jī)械磨損(零部件失效的一種基本類型),數(shù)據(jù)可讀/寫,具有配置寄存器和數(shù)據(jù)寄存器,多電平量存儲(chǔ)功能,易于軟件控制,體積小,易于裝配。它適于家庭影院系統(tǒng),音頻環(huán)繞控制、音響功放和有線電視設(shè)備。
2023-04-20 14:04:39
,這樣就不符合絕對(duì)編碼唯一的原則,這樣的編碼器只能用于旋轉(zhuǎn)范圍360度以內(nèi)的測(cè)量,稱為 單圈絕對(duì)式編碼器。優(yōu)點(diǎn)為:調(diào)節(jié)精度(精確度)高,沒有噪聲,有極長(zhǎng)的工作壽命,無機(jī)械磨損(零部件失效的一種基本類
2023-04-26 09:21:09
操作都要先找參考點(diǎn)。但是這樣的編碼器它不受停電、干擾的影響。圖2增量式編碼器可利用光電轉(zhuǎn)換原理輸出A、B和Z三組方波脈沖;A、B兩組脈沖相位差90度,能夠判斷出電機(jī)的旋轉(zhuǎn)方向,而Z相為每轉(zhuǎn)一圈輸出一個(gè)
2016-01-26 15:25:43
怎么設(shè)計(jì)一種旋轉(zhuǎn)編碼器采集模塊?如何實(shí)現(xiàn)旋轉(zhuǎn)編碼器采集模塊的硬件設(shè)計(jì)?如何實(shí)現(xiàn)旋轉(zhuǎn)編碼器采集模塊的軟件設(shè)計(jì)?
2021-04-19 08:12:53
旋轉(zhuǎn)測(cè)量技術(shù):絕對(duì)多圈軸型Ether CAT編碼器
2010-08-25 09:38:22 18
18 增量型編碼器與絕對(duì)型編碼器的區(qū)別
編碼器如以信號(hào)原理來分,有增量型編碼器,絕對(duì)型編碼器。 增 量 型 編 碼 器 (旋轉(zhuǎn)
2009-09-26 17:36:292348 旋轉(zhuǎn)式編碼器,旋轉(zhuǎn)式編碼器是什么意思
旋轉(zhuǎn)式編碼器概要
旋轉(zhuǎn)式編碼器的定義 旋轉(zhuǎn)式編碼
2010-03-03 15:27:382205 《深入理解Android》文前
2017-03-19 11:23:200 《深入理解Android:卷I》
2017-03-19 11:23:450 便捷手搖型增量旋轉(zhuǎn)編碼器特點(diǎn):適用于數(shù)控機(jī)床,磨床等的手動(dòng)脈沖輸入、緊急停止開關(guān),ENABLE開關(guān)、適用于4位,6位旋轉(zhuǎn)開關(guān)。編碼器如以信號(hào)原理來分,有增量型編碼器,絕對(duì)型編碼器。我們通常用的是增量
2017-10-25 09:47:3219 光電編碼器主要有增量式編碼器、絕對(duì)式編碼器、混合式絕對(duì)值編碼器、旋轉(zhuǎn)變壓器、正余弦伺服電機(jī)編碼器等,其中增量式編碼器、絕對(duì)式編碼器、混合式絕對(duì)值編碼器屬于數(shù)字量編碼器,旋轉(zhuǎn)變壓器、正余弦伺服電機(jī)編碼器屬于模擬量編碼器。
2018-10-21 10:32:2914399 上的音量旋鈕。對(duì)于這些旋鈕,可以為求低價(jià)、高精度和絕對(duì)讀數(shù)值而選擇電位器,但它們行程有限,通常不到340°,或者可選擇光機(jī)式旋轉(zhuǎn)編碼器,它的行程沒有限制,但價(jià)格較高,精度低,只有相對(duì)讀數(shù)值。本設(shè)計(jì)實(shí)例嘗試將兩者結(jié)合起來,兼具
2018-12-03 11:46:01776 基于絕對(duì)式光電旋轉(zhuǎn)編碼器測(cè)量精度高、具有掉電記憶功能的優(yōu)點(diǎn), 探討了絕對(duì)式光電旋轉(zhuǎn)編碼器在電機(jī)旋轉(zhuǎn)位置測(cè)量方面的應(yīng)用, 并提出了一種嵌入式系統(tǒng)實(shí)現(xiàn)方案。結(jié)合單片機(jī)和絕對(duì)式編碼器的特點(diǎn), 詳細(xì)介紹
2019-07-04 17:33:3940 本文主要介紹了旋轉(zhuǎn)編碼器參數(shù)以及與plc的連接方法。在我們選擇旋轉(zhuǎn)編碼器的時(shí)候會(huì)有一些專業(yè)術(shù)語的參數(shù),這些專業(yè)術(shù)語是什么含義呢?我們來了解一下后更清楚的定位我們需要的旋轉(zhuǎn)編碼器參數(shù)才會(huì)更準(zhǔn)確。
2019-08-06 11:24:175203 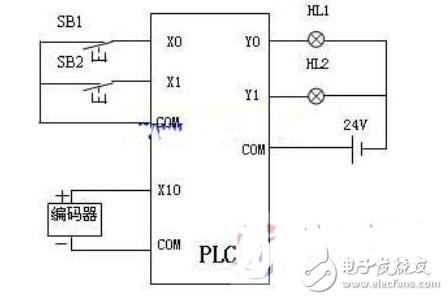
本文主要介紹了旋轉(zhuǎn)編碼器測(cè)量及安裝方法。旋轉(zhuǎn)編碼器檢測(cè)直線位移方法具體如下:使用“彈性連軸器”將旋轉(zhuǎn)編碼器與驅(qū)動(dòng)直線位移的動(dòng)力裝置的主軸直接聯(lián)軸。
2019-08-06 11:40:503377 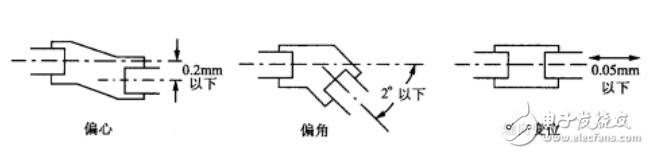
本文首先介紹了旋轉(zhuǎn)編碼器拆卸方法,其次闡述了旋轉(zhuǎn)編碼器更換步驟,最后介紹了旋轉(zhuǎn)編碼器型號(hào)說明。
2019-08-06 11:48:3316767 本文主要闡述了增量式編碼器與絕對(duì)式編碼器的區(qū)別。
2019-11-06 14:56:4060890 絕對(duì)式旋轉(zhuǎn)光電編碼器如圖4-13所示,絕對(duì)編碼器由機(jī)械位置決定每個(gè)位置的唯一性,它無須記憶,無須找參考點(diǎn),而且不用一直計(jì)數(shù),什么時(shí)候需要知道位置,什么時(shí)候就去讀取它的位置。這樣,編碼器的抗干擾特性、數(shù)據(jù)的可靠性大大提高,目前已經(jīng)越來越廣泛地應(yīng)用于各種工業(yè)系統(tǒng)的角度、長(zhǎng)度測(cè)量和定位控制中。
2019-11-06 16:09:0115779 本文首先闡述了絕對(duì)值編碼器的原理,其次闡述了絕對(duì)式編碼器的特點(diǎn),最后闡述了絕對(duì)值編碼器應(yīng)用。
2019-11-06 16:27:0211172 旋轉(zhuǎn)編碼器是工業(yè)中重要的機(jī)械位置角度、長(zhǎng)度、速度反饋并參與控制的傳感器,旋轉(zhuǎn)編碼器分增量值編碼器、絕對(duì)值編碼器、絕對(duì)值多圈編碼器。
2020-03-12 15:59:054680 旋轉(zhuǎn)編碼器分為增量型編碼器絕對(duì)型編碼器兩種,型號(hào)有EC08、EC11、EC12、EC16;增量型編碼器比較通用;絕對(duì)型編碼器價(jià)格要貴一些,而且絕對(duì)型編碼器有量程范圍,所以一般在特殊需要的機(jī)床
2020-12-02 17:34:044040 編碼器的分辨率如何理解,常見的編碼器類型有絕對(duì)式編碼器和增量式編碼器,絕對(duì)和增量的概念大家應(yīng)該清楚,最大的區(qū)別就是絕對(duì)位置是帶有記憶的,編碼器旋轉(zhuǎn)的每個(gè)刻度都帶有標(biāo)記,斷電重新上電后是可以記住位置的,而增量式的就是一個(gè)技術(shù),旋轉(zhuǎn)多少計(jì)多少數(shù),斷電后不記住位置。
2021-03-14 15:18:2818535 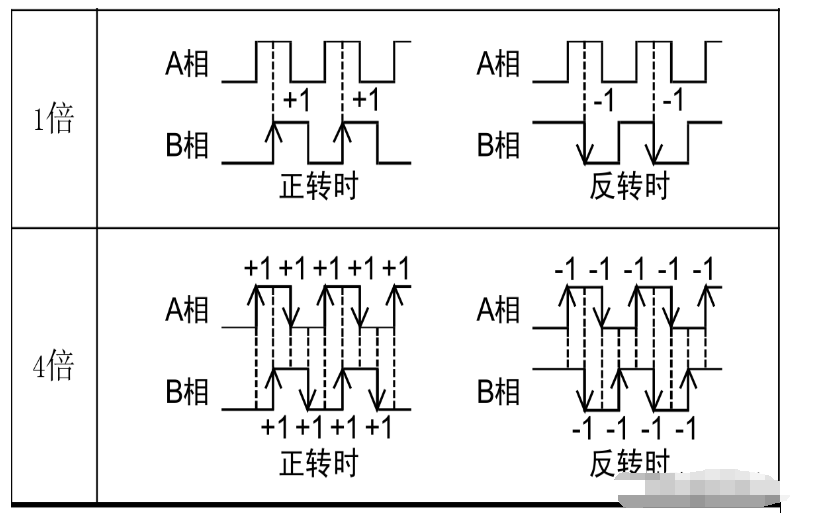
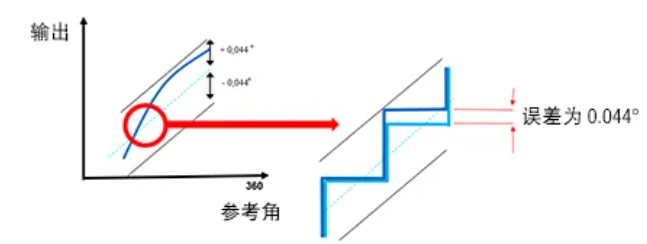
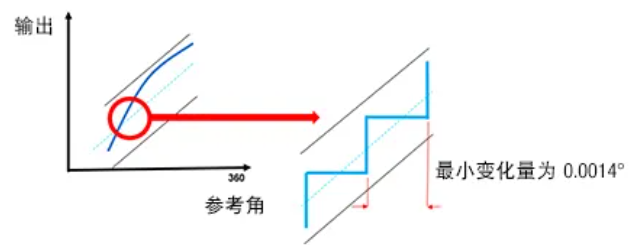
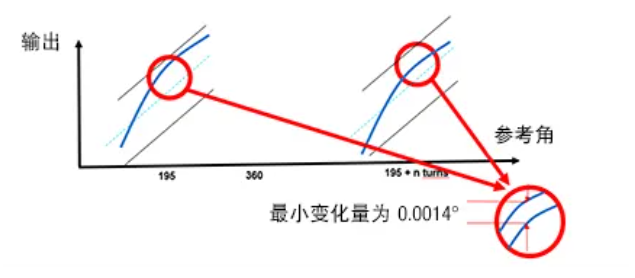
我們?cè)诓榭?Vishay 的非接觸式絕對(duì)式旋轉(zhuǎn)磁性編碼器的性能介紹時(shí),會(huì)遇到精度、分辨率和重復(fù)精度等參數(shù),請(qǐng)問它們的定義分別是什么?
2021-12-13 11:46:422601 
想找到一款對(duì)雷電免疫,并能在長(zhǎng)距離內(nèi)運(yùn)行的適用于軌道交通的傳感器?想要在MRI中實(shí)現(xiàn)動(dòng)態(tài)監(jiān)測(cè)位置、速度和加速度?那虹科增量式&絕對(duì)式編碼器將是您的不二選擇。如果您有相關(guān)需求,歡迎隨時(shí)聯(lián)系我們!
2022-11-01 16:35:48388 
虹科MR430&330系列絕對(duì)式光纖編碼器是用于確定軸位置的角度計(jì),均為純光學(xué)無源設(shè)計(jì)。HK-MR330系列適用于間隔距離較大的編碼器和控制器,HK-MR430 系列適用于由于體積小而提供小空間的系統(tǒng)。與增量式旋轉(zhuǎn)編碼器相比,測(cè)量值在開啟后立即可用,無需參考。
2022-11-17 14:37:01624 增量式編碼器和絕對(duì)值編碼器哪個(gè)好? 編碼器是伺服系統(tǒng)上的重要組成部分,可以發(fā)送脈沖給驅(qū)動(dòng)器,用于運(yùn)動(dòng)位置的矯正,實(shí)現(xiàn)閉環(huán)控制。目前,常見的伺服編碼器類型有增量式編碼器以及絕對(duì)值編碼器兩種,它們哪個(gè)
2023-03-19 23:30:032562 單圈絕對(duì)值編碼器 PVS78E Mining 旋轉(zhuǎn)編碼是用于檢測(cè)旋轉(zhuǎn)角度及其衍生機(jī)械參數(shù)的一類傳感器,包括速度和加速度等,可檢測(cè)旋轉(zhuǎn)、直線等傳動(dòng)運(yùn)動(dòng)。由于應(yīng)用廣泛,現(xiàn)代旋轉(zhuǎn)編碼器可見于諸多機(jī)械
2023-04-25 14:16:582264 、液體和油脂等污染物以及震動(dòng)和振動(dòng)不敏感。下圖是電機(jī)控制系統(tǒng)框圖:電機(jī)控制框圖中科阿爾法磁性旋轉(zhuǎn)編碼器AME256可以達(dá)到12bit的高精度,該芯片內(nèi)部包含了兩對(duì)互
2022-10-17 14:43:16782 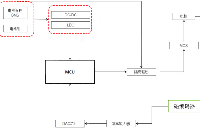
虹科增量式&絕對(duì)式編碼器案例研究(上)簡(jiǎn)介軌道交通醫(yī)療想找到一款對(duì)雷電免疫,并能在長(zhǎng)距離內(nèi)運(yùn)行的適用于軌道交通的傳感器?想要在MRI中實(shí)現(xiàn)動(dòng)態(tài)監(jiān)測(cè)位置、速度和加速度?那虹科增量式&
2022-11-03 17:54:06396 
|虹科新品|HK-MR430&330絕對(duì)式光纖編碼器(上)虹科MR430&330系列絕對(duì)式光纖編碼器是用于確定軸位置的角度計(jì),均為純光學(xué)無源設(shè)計(jì)。HK-MR330系列適用于間隔
2022-11-18 09:55:08494 什么是絕對(duì)值編碼器?絕對(duì)值編碼器裝置在多圈旋轉(zhuǎn)后仍然能提供絕對(duì)位置,不用時(shí)歸零。多回轉(zhuǎn)裝置包括內(nèi)部傳動(dòng)裝置,這是給用戶提供最好的解決方案。主接口是BiSS-C或SSI。對(duì)于某些設(shè)備,具體位置載入的延遲可能是一個(gè)難題。
2023-03-24 11:26:182776 
增量型編碼器與絕對(duì)值型編碼器怎么選擇?在進(jìn)行編碼器選擇時(shí),增量型編碼器和絕對(duì)值型編碼器是兩種常見的選擇。增量型編碼器是一種基于脈沖計(jì)數(shù)的編碼器,通常由光電編碼器和霍爾編碼器組成。這種編碼器的主要優(yōu)點(diǎn)
2023-05-08 11:28:331341 
旋轉(zhuǎn)編碼器是什么?淺讀旋轉(zhuǎn)編碼器工作原理與特點(diǎn)及應(yīng)用:旋轉(zhuǎn)編碼器是一種常見的傳感器,它能夠通過檢測(cè)旋轉(zhuǎn)軸的轉(zhuǎn)動(dòng)實(shí)現(xiàn)實(shí)時(shí)位置監(jiān)測(cè)與控制。它具有高精度、長(zhǎng)壽命、可重復(fù)性高、體積小等特點(diǎn),因此在機(jī)器人控制、自動(dòng)化生產(chǎn)、醫(yī)療設(shè)備、輪廓檢測(cè)等方面被廣泛應(yīng)用。
2023-05-29 09:21:152031 
增量式編碼器和絕對(duì)值編碼器有哪些區(qū)別?增量式編碼器通過對(duì)變化量進(jìn)行計(jì)數(shù)來測(cè)量位置變化,而絕對(duì)值編碼器可提供實(shí)際位置值。因此,增量式編碼器對(duì)于測(cè)量無限循環(huán)的運(yùn)動(dòng)比較有用,因?yàn)樗鼈兛梢允褂糜?jì)數(shù)器來跟蹤旋轉(zhuǎn)次數(shù)和速度。相比之下,絕對(duì)值編碼器適用于任務(wù)需要直接獲得位置信息的情景,如機(jī)器人運(yùn)動(dòng)。
2023-07-05 13:34:282249 
絕對(duì)值編碼器是一種用于測(cè)量旋轉(zhuǎn)位置或線性位移的傳感器。與增量編碼器不同,絕對(duì)值編碼器可以提供特定位置的唯一輸出值,而不需要進(jìn)行校準(zhǔn)。這使得絕對(duì)值編碼器在需要高精度位置測(cè)量的應(yīng)用中非常有用,例如機(jī)器人、自動(dòng)化系統(tǒng)和醫(yī)療設(shè)備。
2023-07-26 09:53:329976 在旋轉(zhuǎn)、直線編碼器及磁柵尺中得到廣泛應(yīng)用的兩款產(chǎn)品:“磁性傳感器”及“插補(bǔ)細(xì)分器”。
2023-10-12 18:17:13499 磁性編碼器是一種先進(jìn)的技術(shù)裝置,它通過利用磁性材料來實(shí)現(xiàn)精確的編碼功能。無論在哪個(gè)領(lǐng)域,磁性編碼器都扮演著重要的角色,為各種精密設(shè)備提供準(zhǔn)確的測(cè)量和控制。1、磁性編碼器的結(jié)構(gòu):磁性編碼器由兩個(gè)主要
2023-11-08 11:03:05549 
26位多圈絕對(duì)值編碼器是什么?26位多圈絕對(duì)值編碼器是一種用于測(cè)量旋轉(zhuǎn)角度的裝置,它可以提供高精度的角度測(cè)量結(jié)果,而且具有較高的可靠性和穩(wěn)定性。下面我們就介紹26位多圈絕對(duì)值編碼器的結(jié)構(gòu)、工作原理以及應(yīng)用領(lǐng)域。
2023-11-08 11:18:08749 
磁性編碼器的工作原理? 磁性編碼器是一種常見的測(cè)量裝置,用于測(cè)量物體的位置和運(yùn)動(dòng)。它可以通過檢測(cè)磁性材料的變化來進(jìn)行精確的測(cè)量。本文將詳細(xì)介紹磁性編碼器的工作原理。 磁性編碼器主要由兩部分組成:磁性
2023-12-18 14:36:55511 或北極極化,主要取決于應(yīng)用程序需要什么樣的輸出信號(hào)。磁性編碼器的工作原理:當(dāng)標(biāo)尺旋轉(zhuǎn)或移動(dòng)時(shí),它會(huì)通過讀頭。因?yàn)樽x頭內(nèi)部有一組傳感器,這種傳感器可以檢測(cè)到每個(gè)磁條通過
2024-01-22 11:24:40275 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論