[導(dǎo)讀] 大家好,我是逸珺。今天想分享一種超級(jí)實(shí)用的步進(jìn)電機(jī)調(diào)速算法,這種算法在步進(jìn)電機(jī)調(diào)速方案中可以說(shuō)是一種非常優(yōu)異的方案。梯形調(diào)速算法 為啥需要設(shè)計(jì)一個(gè)調(diào)速算法呢?步進(jìn)電機(jī)不是給多少脈...
2021-09-01 07:53:17
步進(jìn)電機(jī)的工作原理是什么?51單片機(jī)如何調(diào)速步進(jìn)電機(jī)?
2021-10-19 07:44:43
通過(guò)keil和proteus仿真模擬51單片機(jī)控制步進(jìn)電機(jī)的正反轉(zhuǎn)與調(diào)速,簡(jiǎn)單實(shí)現(xiàn)7擋可調(diào)速功能。
2021-06-29 07:10:45
變流器供電的調(diào)速方法 直流電機(jī)維修改變電樞電壓調(diào)速是直流電機(jī)調(diào)速系統(tǒng)中應(yīng)用最廣的一種調(diào)速方法。 4. 直流電機(jī)采用大功率半導(dǎo)體器件的直流電機(jī)脈寬調(diào)速方法 這種方法最為常見(jiàn) 5. 直流電機(jī)改變勵(lì)磁電
2017-06-05 16:03:04
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(及步進(jìn)角)。您可以通過(guò)控制脈沖個(gè)來(lái)控制角位移量,從而達(dá)到準(zhǔn)確
2021-06-28 07:52:13
一種利用限位開(kāi)關(guān)實(shí)現(xiàn)步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)和停轉(zhuǎn)的方法這種方法還是存在一些誤差,只是將程序中的循環(huán)的步進(jìn)數(shù)目修改成0,即可實(shí)現(xiàn)步進(jìn)電機(jī)的上電停轉(zhuǎn)。//本次實(shí)驗(yàn)電機(jī)驅(qū)動(dòng)采用共陰極接線(xiàn)方式//將步進(jìn)電機(jī)的參數(shù)
2021-08-31 07:54:17
一種新型恒功率超級(jí)電容器快速充電機(jī)設(shè)計(jì)
2012-08-10 12:58:42
計(jì)算機(jī)控制步進(jìn)電機(jī)原理是什么?怎么設(shè)置步進(jìn)電機(jī)的正轉(zhuǎn)反轉(zhuǎn)?步進(jìn)電機(jī)調(diào)速工作原理及程序控制原理是什么?
2021-10-21 06:19:50
步進(jìn)電機(jī)S加減速算法與查表方式哪個(gè)更好,有誰(shuí)用過(guò),能否提供實(shí)例?
2023-11-08 08:10:26
步進(jìn)電機(jī)S型曲線(xiàn)加減速算法與實(shí)現(xiàn)Monte-Carlo2017-05-18 10:06:232653收藏2分類(lèi)專(zhuān)欄:機(jī)器人運(yùn)動(dòng)學(xué)一年前做過(guò)的S型曲線(xiàn)加減速算法,再次做的時(shí)候竟然犯錯(cuò),在此總結(jié)記錄一
2021-07-08 09:56:46
固定的角度一步一步運(yùn)行的。可以通過(guò)控制脈沖個(gè)數(shù)來(lái)控制角位移量,從而達(dá)到準(zhǔn)確定位的目的;同時(shí)可以通過(guò)控制脈沖頻率來(lái)控制電機(jī)轉(zhuǎn)動(dòng)的速度和加速度,從而達(dá)到調(diào)速的目的。步進(jìn)電機(jī)可以作為一種控制用的特種電機(jī),利用其沒(méi)有...
2021-07-12 08:59:24
步進(jìn)電機(jī)為啥需要設(shè)計(jì)一個(gè)調(diào)速算法?
2021-10-29 07:29:16
步進(jìn)電機(jī)加減速算法
2022-01-11 06:45:22
模式被稱(chēng)為半步進(jìn)模式,其電機(jī)每個(gè)勵(lì)磁的有效步距角減少了一半,其輸出的扭矩也較低。以上3種模式均可用于反方向轉(zhuǎn)動(dòng)(逆時(shí)針?lè)较?,如果順序相反則不行。通常,步進(jìn)電機(jī)具有多極,以便減小步距角,但是,繞組的數(shù)量和驅(qū)動(dòng)順序是不變的。`
2014-01-22 10:49:38
實(shí)驗(yàn)二十三:步進(jìn)電機(jī)步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(及步進(jìn)角)。你可以通過(guò)控制脈沖個(gè)數(shù)來(lái)控制
2021-07-08 09:05:44
步進(jìn)電動(dòng)機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu),當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(這個(gè)角度叫做歩距角)。我們可以通過(guò)控制脈沖的個(gè)數(shù)來(lái)控制電機(jī)的角位移量
2021-07-08 10:12:17
步進(jìn)電機(jī)最簡(jiǎn)單的驅(qū)動(dòng)方法,了解四軸步進(jìn)電機(jī)驅(qū)動(dòng)器原理 四軸步進(jìn)電機(jī)驅(qū)動(dòng)器原理-簡(jiǎn)介四軸步進(jìn)電機(jī)驅(qū)動(dòng)器,其實(shí)就是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。首先步進(jìn)驅(qū)動(dòng)器會(huì)接收到一個(gè)脈沖信號(hào),然后它按設(shè)定
2021-07-12 08:18:40
目錄步進(jìn)電機(jī)梯形加減速梯形加減速算法原理分析算法實(shí)現(xiàn)步進(jìn)電機(jī)梯形加減速電機(jī)的控制方式一般分為開(kāi)環(huán)控制與閉環(huán)控制兩種控制方式,其中開(kāi)環(huán)控制原理框圖如下:這種種控制方式的特點(diǎn)是:控制簡(jiǎn)單、實(shí)現(xiàn)容易、價(jià)格
2021-07-07 07:53:48
最近公司的一個(gè)項(xiàng)目用帶驅(qū)動(dòng)器的步進(jìn)電機(jī),奈何,經(jīng)理讓我搞個(gè)勻加速的啟動(dòng)和停止。以前從來(lái)沒(méi)考慮過(guò)算法的我,走了很多彎路,不過(guò)最后還是解決了這個(gè)問(wèn)題。梯形加減速應(yīng)該是指數(shù)加速算法和S型加速算法中最簡(jiǎn)單也
2021-07-08 06:49:48
一年前做過(guò)的S型曲線(xiàn)加減速算法,再次做的時(shí)候竟然犯錯(cuò),在此總結(jié)記錄一下,方便以后查閱,同時(shí)希望幫助初學(xué)者提供簡(jiǎn)單的參考資料(注:本項(xiàng)目采用的帶細(xì)分的驅(qū)動(dòng)器,MCU的OC比較輸出模塊產(chǎn)生50%的PWM
2021-06-28 08:41:08
步進(jìn)電機(jī)工作原理就是一種將電脈沖轉(zhuǎn)化為角位移的;即當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度。我們可以通過(guò)控制脈沖的個(gè)數(shù)來(lái)控制電機(jī)的角位移量,從而達(dá)到精確定位的目的;同時(shí)還可以通過(guò)控制脈沖頻率來(lái)控制電機(jī)轉(zhuǎn)動(dòng)的速度,從而達(dá)到調(diào)速的目的。
2021-12-07 12:21:46
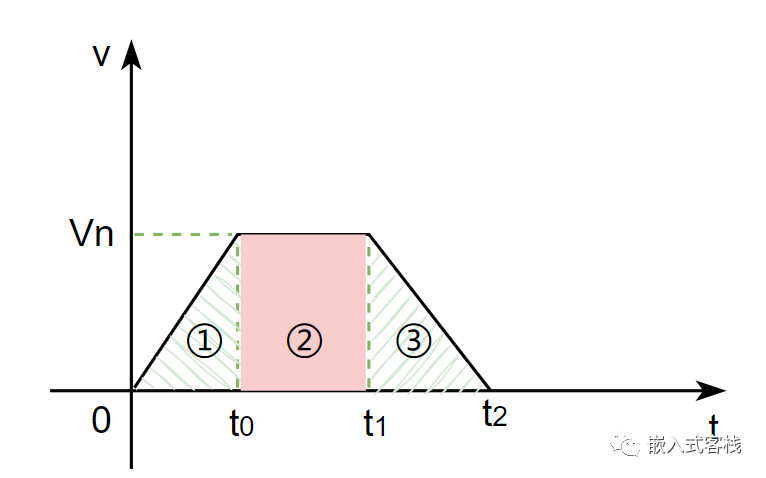
目錄步進(jìn)電機(jī)S形加減速簡(jiǎn)介七段S形加減速算法原理分析五段S形加減速算法實(shí)現(xiàn)算法分析查表法編程實(shí)現(xiàn)思路及方法S曲線(xiàn)加減速流程圖步進(jìn)電機(jī)S形加減速簡(jiǎn)介一個(gè)物體從起點(diǎn)運(yùn)動(dòng)到終點(diǎn)要經(jīng)歷加速、勻速、減速的過(guò)程
2021-07-08 09:18:53
步進(jìn)電機(jī)調(diào)速控制系統(tǒng)設(shè)計(jì)C語(yǔ)言程序及說(shuō)明.doc步進(jìn)電機(jī)調(diào)速控制系統(tǒng)設(shè)計(jì)C語(yǔ)言程序調(diào)速。實(shí)現(xiàn)控制功能以8051單片機(jī)為控制器,系統(tǒng)設(shè)四個(gè)按鍵“工作/停止按鍵”、“加速按鍵”、“減速按鍵”、“正反向控制按鍵”。系統(tǒng)上電后,按下“正反向控制按鍵”,控制電機(jī)正反轉(zhuǎn);每按一次“加速按鍵”后,步進(jìn)電機(jī)...
2021-07-05 07:05:35
調(diào)速電機(jī)是利用改變電機(jī)的級(jí)數(shù)、電壓、電流、頻率等方法改變電機(jī)的轉(zhuǎn)速,以使電機(jī)達(dá)到較高的使用性能的一種電機(jī)。
2020-03-11 09:01:08
項(xiàng)目中需要對(duì)步進(jìn)電機(jī)進(jìn)行較為精準(zhǔn)的控制。之前寫(xiě)過(guò)采用定時(shí)器主從模式輸出精準(zhǔn)脈沖個(gè)數(shù)的文章。后來(lái)項(xiàng)目推進(jìn),對(duì)步進(jìn)電機(jī)的運(yùn)行速度有一定的要求。但步進(jìn)電機(jī)的啟動(dòng)頻率較低,不能直接達(dá)到較高的速度。故嘗試
2021-07-08 09:52:37
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。可以通過(guò)控制脈沖數(shù)來(lái)控制步進(jìn)電機(jī)的角位移量,從而達(dá)到準(zhǔn)確定位的目的,同時(shí)可以通過(guò)控制脈沖頻率來(lái)控制電機(jī)的速度和加速度,從而達(dá)到調(diào)速的目的。由于步進(jìn)電機(jī)控制簡(jiǎn)單、運(yùn)行可靠,所以被廣泛應(yīng)用于各種控制裝置中。
2019-08-19 07:31:47
通過(guò)FPGA實(shí)現(xiàn)輸出有限個(gè)PWM個(gè)數(shù),實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)精確控制,順便說(shuō)一句,這個(gè)問(wèn)題16年就有人咨詢(xún)過(guò)了,一個(gè)人做出來(lái)就出來(lái)得瑟,有啥裝的。我給大家分享一下。順便把這個(gè)人掛出來(lái)下面我截圖一下FPGA的程序同時(shí),基于這個(gè)程序,就可以嘗試編寫(xiě)S加減速算法和T型算法
2022-09-01 17:28:57
STM32控制步進(jìn)電機(jī)的怎么實(shí)現(xiàn)平滑調(diào)速
2023-10-23 06:39:41
項(xiàng)目中對(duì)步進(jìn)電機(jī)運(yùn)行速度有了新要求,所以嘗試實(shí)現(xiàn)梯形加減速算法,S形加減速算法。本文主要實(shí)現(xiàn)S形加減速算法。原理/思路步進(jìn)電機(jī)有啟動(dòng)頻率這一概念。在啟動(dòng)時(shí)有一個(gè)最大啟動(dòng)頻率,在低于最大啟動(dòng)頻率的速度
2021-06-28 10:07:24
一年前做過(guò)的S型曲線(xiàn)加減速算法,再次做的時(shí)候竟然犯錯(cuò),在此總結(jié)記錄一下,方便以后查閱,同時(shí)希望幫助初學(xué)者提供簡(jiǎn)單的參考資料(注:本項(xiàng)目采用的帶細(xì)分的驅(qū)動(dòng)器,MCU的OC比較輸出模塊產(chǎn)生50%的PWM
2021-08-31 08:55:42
最近幾年的人臉檢測(cè)算法和一種新的快速算法,與大家探討特征、弱分類(lèi)器、收斂準(zhǔn)則、樣本選擇等對(duì)人臉檢測(cè)性能的影響,并嘗試分析人臉姿態(tài)、表情、遮擋、年齡、種族等影響因素。2013年全國(guó)圖像圖形處理技術(shù)應(yīng)用大會(huì)
2013-09-26 15:13:24
1.什么是步進(jìn)電機(jī)?步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)驅(qū)動(dòng)器接收到 一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(及步進(jìn)角)。您可以通過(guò)控制脈沖個(gè)來(lái)控制
2021-07-08 07:35:46
步進(jìn)電機(jī)小知識(shí)(轉(zhuǎn))1.什么是步進(jìn)電機(jī)? 步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(及步進(jìn)角)。您可
2021-07-08 06:11:15
取代模擬控制技術(shù)已成為發(fā)展趨勢(shì)。電機(jī)交流變頻調(diào)速技術(shù)是當(dāng)今節(jié)電、改善工藝流程以提高產(chǎn)品質(zhì)量和改善環(huán)境、推動(dòng)技術(shù)進(jìn)步的一種主要手段。變頻調(diào)速以其優(yōu)異的調(diào)速和起制動(dòng)性能,高效率、高功率因...
2021-09-03 08:03:53
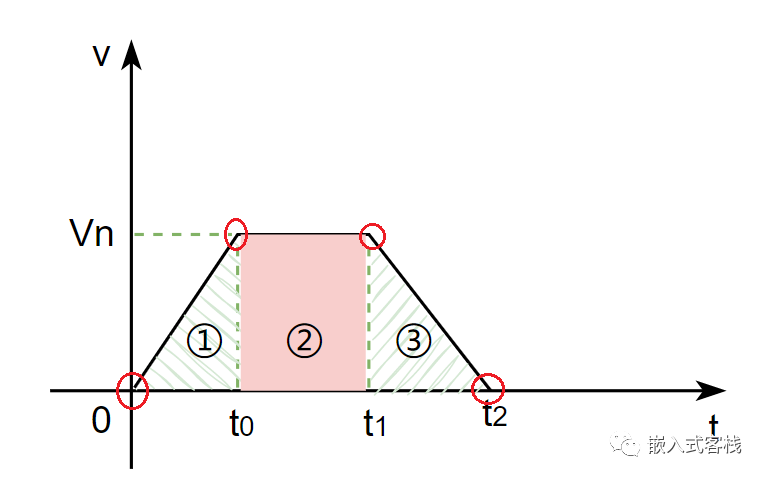
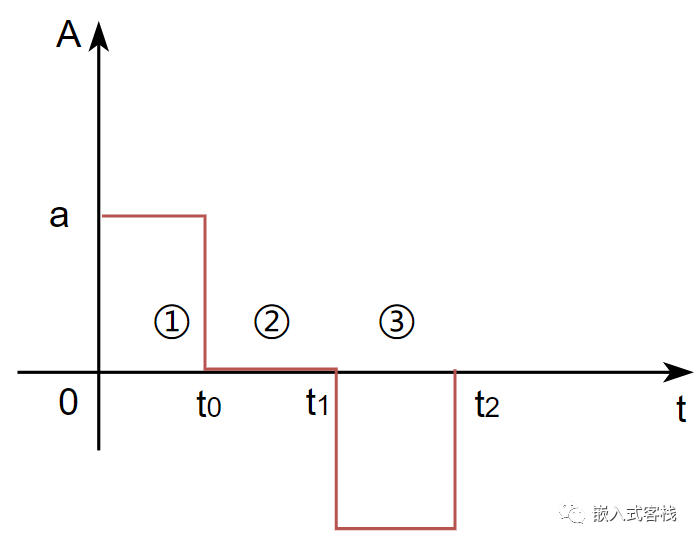
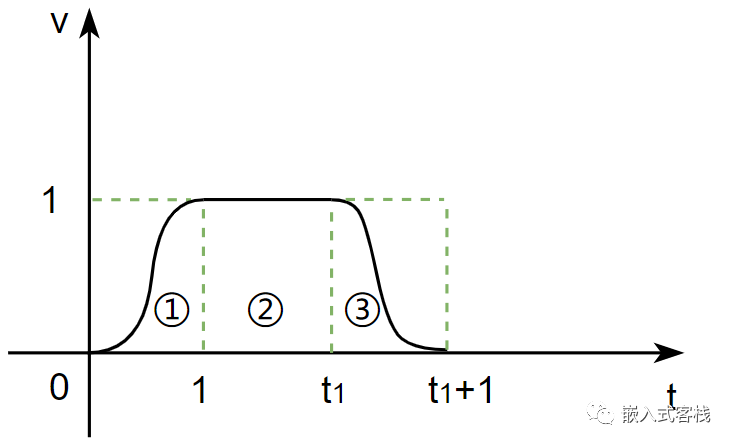
[導(dǎo)讀] 大家好,我是逸珺。今天想分享一種超級(jí)實(shí)用的步進(jìn)電機(jī)調(diào)速算法,這種算法在步進(jìn)電機(jī)調(diào)速方案中可以說(shuō)是一種非常優(yōu)異的方案。梯形調(diào)速算法為啥需要設(shè)計(jì)一個(gè)調(diào)速算法呢?步進(jìn)電機(jī)不是給多少脈沖就動(dòng)多少步
2021-09-03 09:05:44
電機(jī)加減速算法目的:對(duì)于上述2、3的場(chǎng)合,步進(jìn)電機(jī)容易出現(xiàn)丟步和過(guò)沖甚至無(wú)法啟動(dòng)的現(xiàn)象,所以加入該算法來(lái)解決這一問(wèn)題。3. 算法實(shí)現(xiàn)3.1加減速期望曲線(xiàn)...
2021-07-07 07:58:50
本文提出一種基于TM1300的4x4整數(shù)變換的快速算法,使用了并行算是技術(shù)大大減少了計(jì)算量。
2021-06-04 06:41:35
直流電機(jī)調(diào)速系統(tǒng)是由哪些部分組成的?如何去實(shí)現(xiàn)一種基于STM32的直流電機(jī)調(diào)速系統(tǒng)設(shè)計(jì)?
2021-10-18 11:32:14
新型電機(jī)調(diào)速系統(tǒng)的基本工作原理是什么?新型電機(jī)調(diào)速系統(tǒng)的硬件結(jié)構(gòu)是由哪些部分構(gòu)成的?如何對(duì)新型電機(jī)調(diào)速系統(tǒng)進(jìn)行調(diào)試?
2021-06-15 09:15:56
的AC電動(dòng)機(jī)和伺服電動(dòng)機(jī)的功率(W)是指電動(dòng)機(jī)在“額定轉(zhuǎn)速”下運(yùn)轉(zhuǎn)時(shí)的功率(W),即“額定功率”。步進(jìn)電機(jī)一般在較大范圍內(nèi)調(diào)速使用、其功率是變化的,代入不同的轉(zhuǎn)速算出的功率(W)也會(huì)有所不同一般只用...
2021-07-08 09:01:54
基于永磁同步電機(jī)伺服系統(tǒng)的控制算法是什么?如何對(duì)一種基于永磁同步電機(jī)伺服系統(tǒng)的控制算法進(jìn)行仿真?
2021-07-13 08:12:47
如何通過(guò)步進(jìn)電機(jī)去控制機(jī)械臂?如何通過(guò)步進(jìn)電機(jī)去實(shí)現(xiàn)一種插補(bǔ)算法?
2021-07-08 06:54:36
怎么實(shí)現(xiàn)步進(jìn)電機(jī)S型曲線(xiàn)加減速算法?
2021-10-12 10:02:51
怎么實(shí)現(xiàn)STM32步進(jìn)電機(jī)S型加減速算法?
2021-10-11 07:57:55
怎么實(shí)現(xiàn)S形加減速算法?
2021-10-09 09:16:34
怎么實(shí)現(xiàn)基于單片機(jī)的步進(jìn)電機(jī)調(diào)速系統(tǒng)的設(shè)計(jì)?
2021-10-19 06:26:59
1、引言步進(jìn)電機(jī)是一種離散運(yùn)動(dòng)的裝置,它和現(xiàn)代數(shù)字控制技術(shù)有著緊密的本質(zhì)的聯(lián)系。步進(jìn)電機(jī)亦是一種將電脈沖轉(zhuǎn)化為角位移或直線(xiàn)位移的執(zhí)行機(jī)構(gòu),當(dāng)步進(jìn)電機(jī)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定
2021-11-24 08:28:18
基于51單片機(jī)的步進(jìn)電機(jī)正反轉(zhuǎn)調(diào)速系統(tǒng)控制_仿真+源程序+詳細(xì)教程先上圖:代碼:main.c
2021-07-08 07:07:56
什么是光耦?光耦有何作用?驅(qū)動(dòng)電路是指什么?常用的驅(qū)動(dòng)芯片有哪些?怎樣去設(shè)計(jì)一種基于STM32的直流電機(jī)PWM調(diào)速系統(tǒng)?
2021-06-29 09:30:00
步進(jìn)電機(jī)的基本原理是什么?步進(jìn)電機(jī)的驅(qū)動(dòng)方式有哪幾種?怎樣去設(shè)計(jì)一種基于ULN2003芯片的步進(jìn)電機(jī)驅(qū)動(dòng)電路?
2021-10-14 09:09:43
步進(jìn)電機(jī)是什么?步進(jìn)電機(jī)有哪些應(yīng)用?怎樣去設(shè)計(jì)一種基于單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)?怎樣去設(shè)計(jì)一種基于C++Builder下環(huán)狀閥片位移檢測(cè)系統(tǒng)?
2021-07-06 06:25:55
如何對(duì)對(duì)無(wú)刷直流電機(jī)進(jìn)行加減速控制?怎樣去設(shè)計(jì)一種基于單片機(jī)的無(wú)刷直流電機(jī)PID調(diào)速控制系統(tǒng)?
2021-08-06 06:48:12
怎樣去設(shè)計(jì)一種基于單片機(jī)的無(wú)刷直流電機(jī)PID調(diào)速控制系統(tǒng)?其代碼程序該如何去編寫(xiě)?
2021-07-23 08:19:12
是不是每一種步進(jìn)電機(jī)都支持細(xì)分
2015-02-06 16:38:31
本文介紹一種基于嵌入式實(shí)時(shí)內(nèi)核ARTXl66的電子差速算法
2021-05-13 06:46:56
一年前做過(guò)的S型曲線(xiàn)加減速算法,再次做的時(shí)候竟然犯錯(cuò),在此總結(jié)記錄一下,方便以后查閱,同時(shí)希望幫助初學(xué)者提供簡(jiǎn)單的參考資料(注:本項(xiàng)目采用的帶細(xì)分的驅(qū)動(dòng)器,MCU的OC比較輸出模塊產(chǎn)生50%的PWM
2021-09-03 08:35:55
摘要本文針對(duì)第十二屆全國(guó)大學(xué)生智能汽車(chē)競(jìng)賽電磁節(jié)能組,設(shè)計(jì)一種采用超級(jí)電容器單獨(dú)供電的無(wú)刷直流電機(jī)(BLDC)調(diào)速控制系統(tǒng)。該裝置在實(shí)現(xiàn)超級(jí)電容器充分放電及對(duì)電能的最大利用的前提下,實(shí)現(xiàn)了控制系統(tǒng)
2021-09-13 07:12:27
請(qǐng)問(wèn)一下如何去實(shí)現(xiàn)一種42步進(jìn)電機(jī)的程序呢?
2021-12-20 07:17:12
本文檔作備份用。摘要: 設(shè)計(jì)了一種具有多模式的步進(jìn)電機(jī)控制裝置,本裝置基于STC的一款單片機(jī)STC89C52,軟件部分由C51編寫(xiě),包含啟停中斷程序、轉(zhuǎn)向中斷程序、步進(jìn)電機(jī)調(diào)速程序以及鍵盤(pán)信號(hào)檢測(cè)
2021-07-07 06:18:01
直流無(wú)刷電機(jī)基本工作原理是什么?怎樣去搭建一種直流無(wú)刷電機(jī)調(diào)速系統(tǒng)仿真模型?為什么要設(shè)計(jì)一種基于模糊優(yōu)化的PID調(diào)速系統(tǒng)?怎樣去設(shè)計(jì)一種基于模糊優(yōu)化的PID調(diào)速系統(tǒng)?
2021-07-20 07:42:33
模擬直流調(diào)速系統(tǒng)的組成和工作原理是什么?怎樣去設(shè)計(jì)一種模擬直流調(diào)速系統(tǒng)?
2021-04-30 06:18:57
文中介紹了一種應(yīng)用于舞臺(tái)電腦燈控制系統(tǒng)的高性能步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng),以及步進(jìn)電機(jī)的細(xì)分驅(qū)動(dòng)原理和自適應(yīng)調(diào)速算法。使用細(xì)分驅(qū)動(dòng)可以顯著地減小步進(jìn)電機(jī)的低頻振動(dòng)
2009-08-13 09:11:00 19
19 序列圖像運(yùn)動(dòng)目標(biāo)檢測(cè)的一種快速算法:研究了序列視頻圖像中運(yùn)動(dòng)目標(biāo)的檢測(cè)與跟蹤快速算法.研究基于Kalman濾波理論的漸消記憶最小二乘法,用該方法重建背景圖像;采用圖像差
2009-10-26 11:23:2337 加減速控制是數(shù)控系統(tǒng)的關(guān)鍵技術(shù),對(duì)提高數(shù)控系統(tǒng)的精度及速度有重要的意義。提出了一種步進(jìn)電機(jī)三軸聯(lián)動(dòng)的快速加減速算法--動(dòng)態(tài)查表法,該算法結(jié)合DDA 插補(bǔ)算法,可以用
2010-01-18 15:33:41106 摘要:介紹了一種基于微機(jī)和單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng),利用上、下位機(jī)控制步進(jìn)電機(jī)的多種運(yùn)行方式,可實(shí)現(xiàn)步進(jìn)電機(jī)正反轉(zhuǎn)控制以及步進(jìn)電機(jī)的無(wú)級(jí)調(diào)速。程序采用模塊化設(shè)計(jì),通
2010-07-22 21:16:4176
反應(yīng)式步進(jìn)電機(jī)PWM調(diào)速電路
反應(yīng)式步
2009-02-09 16:10:46 1588
1588 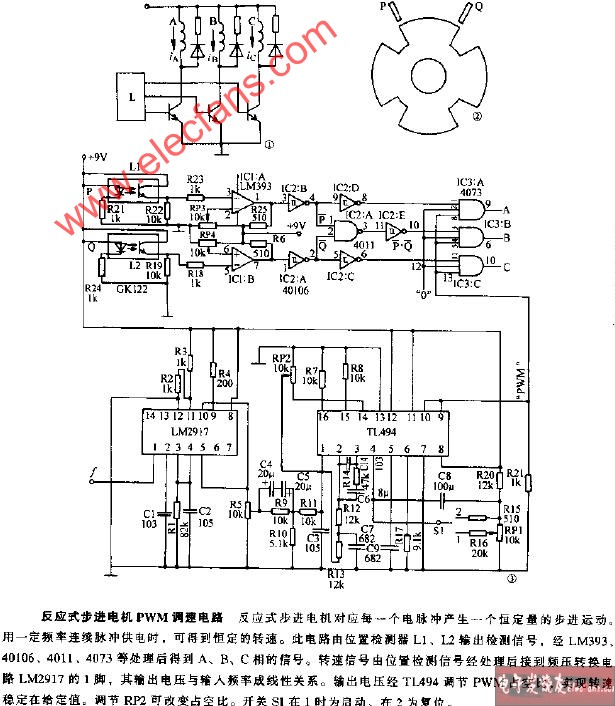
高效的步進(jìn)電機(jī)控制算法
2011-05-07 12:08:081443 
電機(jī)類(lèi)調(diào)速器分為兩種1.步進(jìn)電機(jī)2.伺服電機(jī)。在基于間接數(shù)字控制模式的調(diào)速器中,全數(shù)字式交流伺服電機(jī)調(diào)速器比步進(jìn)電機(jī)具有優(yōu)越性。
2012-01-10 15:34:214538 三相多電平逆變器SVPWM的一種統(tǒng)一快速算法
2016-03-30 14:59:5911 步進(jìn)電機(jī)調(diào)速控制系統(tǒng)資料,有興趣的同學(xué)可以下載學(xué)習(xí)
2016-04-28 15:45:3125 一種新型柔性加減速算法,有需要的下來(lái)看看
2016-04-29 17:57:0911 步進(jìn)電機(jī)調(diào)速控制系統(tǒng)資料,很好設(shè)計(jì)資料,快來(lái)學(xué)習(xí)吧。
2016-05-09 17:10:0130 步進(jìn)電機(jī)調(diào)速系統(tǒng)設(shè)計(jì)資料,很好設(shè)計(jì)資料,快來(lái)學(xué)習(xí)吧。
2016-05-09 17:10:0115 根據(jù)步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)負(fù)載對(duì)加減速響應(yīng)的高速要求,設(shè)計(jì)出一種基于單片視的步進(jìn)電機(jī)調(diào)速離散控制方法
2016-07-12 15:29:432 根據(jù)步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)負(fù)載對(duì)加減速響應(yīng)的高速要求,設(shè)計(jì)出一種基于單片視的步進(jìn)電機(jī)調(diào)速離散控制方法
2016-07-12 15:29:436 基于PWM細(xì)分的步進(jìn)電機(jī)調(diào)速 包括原理圖、PCB、源程序仿真、元件。
2016-07-21 16:35:2821 一種改進(jìn)的增維型雙邊濾波的快速算法_李俊峰
2017-01-07 16:00:430 一種基于ImpulseC的素域橢圓曲線(xiàn)點(diǎn)乘快速算法_崔強(qiáng)強(qiáng)
2017-03-19 11:46:350 STM32 多步進(jìn)電機(jī)加減速算法精確控制 親測(cè)可用~~~
2017-04-02 16:20:45270 本文主要介紹了基于PWM細(xì)分的步進(jìn)電機(jī)調(diào)速設(shè)計(jì).
2018-06-25 08:00:00111 本文主要闡述了步進(jìn)電機(jī)驅(qū)動(dòng)器調(diào)速方法及步進(jìn)電機(jī)驅(qū)動(dòng)器的作用。
2020-04-20 09:10:2810073 簡(jiǎn)要介紹利用PIC控制步進(jìn)電機(jī)對(duì)執(zhí)行元件進(jìn)行自動(dòng)分度,重點(diǎn)介紹一種PIC控制步進(jìn)電機(jī)的分度算法,可實(shí)現(xiàn)360°內(nèi)轉(zhuǎn)角誤差為0,保證了精確分度,并給出分度算法梯形圖。
2021-04-14 17:01:218 為啥需要設(shè)計(jì)一個(gè)調(diào)速算法呢?步進(jìn)電機(jī)不是給多少脈沖就動(dòng)多少步嗎?但是帶上負(fù)載了就可能失步,所謂失步,簡(jiǎn)單理解就是實(shí)際電機(jī)軸轉(zhuǎn)過(guò)...
2022-01-25 17:23:376 隨著電力電子技術(shù)的飛速發(fā)展,變頻調(diào)速的性能指標(biāo)完全可以達(dá)到甚至超過(guò)直流電機(jī)調(diào)速系統(tǒng)。步進(jìn)電機(jī)驅(qū)動(dòng)器通過(guò)調(diào)節(jié)輸入驅(qū)動(dòng)器的脈沖頻率以及驅(qū)動(dòng)器的細(xì)分參數(shù)來(lái)達(dá)到調(diào)節(jié)步進(jìn)電機(jī)轉(zhuǎn)速的作用,其實(shí)就是控制單位時(shí)間內(nèi)步進(jìn)電機(jī)的步數(shù)。
2022-08-15 10:39:106404 在2021年接觸到步進(jìn)電機(jī),當(dāng)時(shí)是用來(lái)驅(qū)動(dòng)熱敏打印機(jī),沒(méi)有用到加減速算法,速度時(shí)間表好像是日本客戶(hù)那邊提供過(guò)來(lái)的,這次調(diào)試加減速算法,遇到了不少問(wèn)題,在這里記錄一下,希望能幫到未來(lái)對(duì)此有困惑的自己,如果能幫到其他人也算是有幸。
2023-01-12 17:00:447875 
目錄 步進(jìn)電機(jī)梯形加減速 梯形加減速和S型曲線(xiàn)比較 如何產(chǎn)生PWM波及TIMx定時(shí)器配置 梯形加減速算法原理分析 1.梯形加減速 2.步進(jìn)電機(jī)基礎(chǔ)方程 3.精確計(jì)算步進(jìn)時(shí)間間隔 4. 加速度的變化
2023-03-17 15:08:376 為啥需要設(shè)計(jì)一個(gè)調(diào)速算法呢?步進(jìn)電機(jī)不是給多少脈沖就動(dòng)多少步嗎?但是帶上負(fù)載了就可能失步,所謂失步,簡(jiǎn)單理解就是
實(shí)際電機(jī)軸轉(zhuǎn)過(guò)的度數(shù),沒(méi)有輸入脈沖對(duì)應(yīng)度數(shù)多。為什么會(huì)這樣呢?電機(jī)的扭矩有可能無(wú)法
2023-03-23 10:53:140
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論