增量光電編碼器基本波形和電路
?
采用旋轉(zhuǎn)式光電編碼器,把它的轉(zhuǎn)軸與重力測(cè)量?jī)x中補(bǔ)償旋鈕軸相連。重力測(cè)量?jī)x中補(bǔ)償旋鈕的角位移
2009-09-26 17:28:45 5681
5681 增量式光電編碼器原理及其結(jié)構(gòu)
增量式光電編碼器的特點(diǎn)是每產(chǎn)生一個(gè)輸出脈沖信號(hào)就對(duì)應(yīng)于
2010-06-02 22:50:4618420 `8.5020.4551.1024 KUBLER增量編碼器增量型, 標(biāo)準(zhǔn), 光電編碼器 Sendix 5020特征:Sendix 5000 和 5020 系列編碼器采用了 Safety-Lock
2019-12-20 11:57:18
編碼器共用時(shí)。這一點(diǎn)應(yīng)特別注意。第二、干擾造成的信號(hào)波動(dòng)所有的編碼器周邊環(huán)境的干擾都會(huì)使增量型拉繩編碼器輸出信號(hào)造成干擾。所以,拉線(xiàn)電阻尺的輸出線(xiàn)與別的線(xiàn)束要分開(kāi)布線(xiàn),并應(yīng)有可靠接地。如出現(xiàn)信號(hào)波動(dòng)
2018-12-19 16:22:43
、干擾造成的信號(hào)波動(dòng)所有的編碼器周邊環(huán)境的干擾都會(huì)使增量型拉繩編碼器輸出信號(hào)造成干擾。所以,拉線(xiàn)電阻尺的輸出線(xiàn)與別的線(xiàn)束要分開(kāi)布線(xiàn),并應(yīng)有可靠接地。如出現(xiàn)信號(hào)波動(dòng)現(xiàn)象,應(yīng)逐一排除干擾源。第三、輸出數(shù)值
2018-12-21 11:37:27
什么呢?1、增量拉繩編碼器有分辨率的差異,使用編碼器的線(xiàn)性決定了它的分辨率,脈沖數(shù)越高,分辨率越高;這是選型的重要依據(jù)之一。2、增量型編碼器通常有三路信號(hào)輸出(差分有六路信號(hào)):A,B和Z,一般采用
2018-12-24 10:25:31
本帖最后由 這般緣 于 2016-5-13 11:03 編輯
如題,我現(xiàn)在角度編碼器加電后A,B相用示波器看能看到波形。選的計(jì)數(shù)器卡是NI6284的,角度編碼器的A,Z,B與6284ctr0
2016-05-13 10:59:13
增量式編碼器與絕對(duì)值式編碼器的區(qū)別是什么?直流電機(jī)和交流電機(jī)的區(qū)別是什么?
2021-10-12 06:17:13
增量式編碼器輸出的脈沖波形信號(hào)形式常見(jiàn)的有哪幾種?增量式編碼器倍頻技術(shù)的M法究竟是怎樣測(cè)速的?
2021-11-09 07:08:29
增量式編碼器如何使用外部中斷實(shí)現(xiàn)測(cè)速?
2021-11-16 08:25:38
大神們!增量式編碼器是怎樣使用的
2015-08-02 08:23:42
首先來(lái)看一下增量式編碼器的輸出信號(hào)和它的信號(hào)倍頻技術(shù)。增量式編碼器輸出的脈沖波形信號(hào)形式常見(jiàn)的有兩種:一種是占空比50%的方波,通道A和B相位差為90°;另一種則是正弦波這類(lèi)模擬信號(hào),通道A和B
2021-08-06 09:25:37
編碼器的使用1.1 增量式編碼器倍頻計(jì)數(shù)增量式編碼器的脈沖波形型號(hào)形式常見(jiàn)的有兩種:一種是占空比為50%的方波,通道A和B相位差為90°;另外一種是正弦波這類(lèi)模擬信號(hào),通道A和B相位差也是90
2021-09-01 06:58:40
,便可以達(dá)到測(cè)速的效果(v=s/t),通過(guò)對(duì)脈沖信號(hào)的累加,和編碼器的碼盤(pán)的周長(zhǎng)(轉(zhuǎn)一圈對(duì)應(yīng)距離) 便可以達(dá)到計(jì)算行走距離的效果(s=n*d)編碼器信號(hào):A 脈沖輸出B 脈沖輸出...
2022-01-10 06:08:32
如題,我現(xiàn)在角度編碼器加電后A,B相用示波器看能看到波形。選的計(jì)數(shù)器卡是NI6624的,角度編碼器的A,Z,B與6624ctr0的 ,SU,GATE,AUX對(duì)接好了。可是用NI MAX的計(jì)數(shù)器功能,和labview角度編碼器的范例怎么都調(diào)試不出來(lái)。求大神賜教
2019-10-24 10:35:00
位移變化(速度)的傳感方法,它是相對(duì)于某個(gè)基準(zhǔn)點(diǎn)的相對(duì)位置增量,不能夠直接檢測(cè)出軸的絕對(duì)位置信息。一般來(lái)說(shuō),增量式光電編碼器輸出A、B兩相互差 電度角的脈沖信號(hào)(即所謂的兩組正交輸出信號(hào)),從而可方便地
2020-03-16 13:33:58
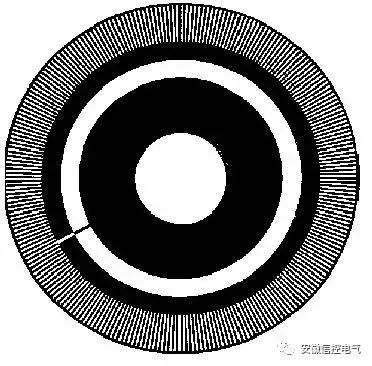
增量式光電編碼器結(jié)構(gòu)和原理增量式光電編碼器結(jié)構(gòu)如圖1所示。在它的編碼盤(pán)邊緣等間隔地制出n個(gè)透光槽。發(fā)光二極管(LED)發(fā)出的光透過(guò)槽孔被光敏二極管所接收。當(dāng)碼盤(pán)轉(zhuǎn)過(guò)1/n圈時(shí),光敏二極管即發(fā)出一個(gè)
2016-09-12 13:43:01
請(qǐng)問(wèn)有沒(méi)有了解增量式旋轉(zhuǎn)編碼器的高手,幫我解決一下一直困擾我問(wèn)題:1.關(guān)于編碼器內(nèi)部的內(nèi)插細(xì)分 有的碼器的內(nèi)插細(xì)分值有1,2,4,6,10,16等,每一個(gè)旋轉(zhuǎn)編碼器有一個(gè)固定的內(nèi)插細(xì)分值還是有多個(gè)
2011-10-16 14:30:25
增量式旋轉(zhuǎn)編碼器怎么用的??怎么把它和減速步進(jìn)電機(jī)用51單片機(jī)聯(lián)系起來(lái)啊??
2015-07-30 21:12:59
閱讀目錄一、增量式旋轉(zhuǎn)編碼器二、硬件設(shè)計(jì)三、軟件設(shè)計(jì)Development kit:MDK5.14IDE:UV4MCU:STM32F103C8T6回到頂部一、增量式旋轉(zhuǎn)編碼器1、簡(jiǎn)介編碼器
2021-12-01 07:57:34
A、B相是4分頻的,增量編碼器是相對(duì)編碼方式,Z相作為參考位置。對(duì)編碼器脈沖進(jìn)行計(jì)數(shù)。得到的計(jì)數(shù)值可以通過(guò)公式自己轉(zhuǎn)換成旋轉(zhuǎn)角度值,程序里面沒(méi)有給出。
2013-09-11 14:26:11
編碼器A相/B相/Z相信號(hào)是什么?
2021-11-15 07:15:01
1.編碼器簡(jiǎn)介編碼器分類(lèi): 按工作原理:光電式、磁電式和觸點(diǎn)電刷式 按碼盤(pán)的刻孔方式:增量式和絕對(duì)式兩類(lèi) 由于博主接觸面還不是很廣,一共就用過(guò)兩個(gè)種類(lèi)的編碼器,都是屬于光電的差分編碼器:一般由8根線(xiàn)
2021-08-19 08:28:28
實(shí)際上就是光電編碼器,分為增量式和絕對(duì)式,較其它檢測(cè)元件有直接輸出數(shù)字量信號(hào),慣量低,低噪聲,高精度,高分辨率,制作簡(jiǎn)便,成本低等優(yōu)點(diǎn)。增量式編碼器結(jié)構(gòu)簡(jiǎn)單,制作容易,一般在碼盤(pán)上刻A、B、Z三道
2012-02-24 22:03:25
、絕對(duì)式以及混合式三種。增量式編碼器:增量式編碼器是直接利用光電轉(zhuǎn)換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90度,從而可方便的判斷出旋轉(zhuǎn)方向,而Z相為每轉(zhuǎn)一個(gè)脈沖,用于基準(zhǔn)點(diǎn)定位。它
2019-10-13 08:00:00
一、編碼器的分類(lèi)根據(jù)檢測(cè)原理,編碼器可分為光學(xué)式、磁式、感應(yīng)式和電容式,根據(jù)其刻度方法及信號(hào)輸出形式,可分為增量式、絕對(duì)式以及混合式三種。1、增量式編碼器 增量式編碼器是直接利用光電轉(zhuǎn)換原理輸出三
2022-01-20 06:47:46
、絕對(duì)式以及混合式三種。 1.1 增量式編碼器 增量式編碼器是直接利用光電轉(zhuǎn)換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90度,從而可方便的判斷出旋轉(zhuǎn)方向,而Z相為每轉(zhuǎn)一個(gè)脈沖,用于基準(zhǔn)點(diǎn)
2017-11-24 19:00:47
,會(huì)停止在最大或最小限位點(diǎn);增量型旋轉(zhuǎn)編碼器可向任意轉(zhuǎn)向進(jìn)行無(wú)限旋轉(zhuǎn)。增量型旋轉(zhuǎn)編碼器采用正交編碼器生成其A和B的輸出信號(hào)。從A和B輸出發(fā)射的脈沖是正交編碼的,這意味著當(dāng)增量編碼器以恒定速度運(yùn)動(dòng)時(shí),A
2022-11-30 08:56:57
空心軸增量式編碼器 軸增量式編碼器輪轂軸增量式編碼器無(wú)軸承增量式編碼器套件/模塊化增量式編碼器光學(xué)增量式編碼器磁增量式編碼器危險(xiǎn)等級(jí)遞增編碼器軸絕對(duì)編碼器輪轂軸絕對(duì)編碼器空心軸絕對(duì)編碼器光學(xué)絕對(duì)編碼器磁絕對(duì)編碼器微型旋轉(zhuǎn)編碼器非接觸式旋轉(zhuǎn)編碼器
2020-07-17 09:54:48
請(qǐng)問(wèn)FM350-2可以帶8路增量式編碼器采集速度嗎? FM350-2是8 通道智能計(jì)數(shù)器模塊,我想用來(lái)采集8路增量式編碼器,采用速度測(cè)量模式來(lái)得到轉(zhuǎn)速信號(hào),請(qǐng)問(wèn)各位高手,可以實(shí)現(xiàn)嗎?
2023-12-20 08:19:17
本帖最后由 美麗時(shí)光2017 于 2017-6-7 11:35 編輯
自己寫(xiě)的小模塊,不足之處敬請(qǐng)指教!/*編碼器輸入模塊(增量型A,B,Z)*/module ENCODER(input
2017-06-07 11:35:25
剛剛學(xué)習(xí)fpga方面的知識(shí),fpga如何測(cè)量一個(gè)增量式編碼器,消除抖動(dòng)的話(huà)是否也是在上升沿和下降沿都進(jìn)行計(jì)數(shù)處理,這樣的話(huà)怎樣設(shè)定可以保障計(jì)數(shù)器可以同時(shí)在兩個(gè)always 下進(jìn)行計(jì)數(shù),可以給一下大概的例程最好
2016-01-11 18:27:47
我想問(wèn)一下,TI的PMSM的例程庫(kù)里,增量編碼器永磁同步電機(jī),初始位置是通過(guò)什么方式實(shí)現(xiàn)的。在例程的那個(gè)位置,謝謝
2018-10-30 15:58:42
。本文講述常見(jiàn)的增量式編碼器,增量式編碼器也可以叫正交編碼器,也就是說(shuō)可以通過(guò)其A、B的相位知道編碼器是正轉(zhuǎn),還是反轉(zhuǎn),還可以根據(jù)編碼器參數(shù)得出旋轉(zhuǎn)了多少角度等。常見(jiàn)的增量式編碼器A、B、Z三根線(xiàn)代表
2020-05-28 08:00:00
` 本帖最后由 YSHL2016 于 2016-9-28 08:44 編輯
在simulink中的matlab function寫(xiě)的增量式編碼器仿真模型。模型輸入為電機(jī)模型輸出的機(jī)械角度thet
2016-09-28 08:34:22
stm32f4編碼器模式花費(fèi)一下午時(shí)間研究編碼器的使用,簡(jiǎn)單總結(jié)如下E6B2-CWZ1X編碼器stm32f407 定時(shí)器編碼器模式一、編碼器簡(jiǎn)介1、分類(lèi)編碼器可按以下方式來(lái)分類(lèi)。(1)增量型:每轉(zhuǎn)過(guò)
2021-08-04 08:29:06
stm32 的Encoder 使用增量式編碼器在實(shí)際應(yīng)用中還是很常見(jiàn)。stm32的定時(shí)器帶的也有編碼器模式。所用的編碼器是有ABZ三相,其中ab相是用來(lái)計(jì)數(shù),z相輸出零點(diǎn)信號(hào)。AB相根據(jù)旋轉(zhuǎn)的方向
2021-08-04 08:11:00
續(xù)位移量離散化或增量化以及位移變化(速度)的傳感方法,它相對(duì)于某個(gè)基準(zhǔn)點(diǎn)的相對(duì)位置增量,不能夠直接檢測(cè)出軸的絕對(duì)位置信息。一般來(lái)說(shuō),增量式光電編碼器輸出A、B兩相互差90讀電角度的脈沖信號(hào)(也即是兩組正交
2021-05-17 13:20:52
我把增量式光電旋轉(zhuǎn)編碼器AB兩端插在開(kāi)發(fā)板的led上,A端處的LED閃爍,B端不閃爍,始終為低電平。請(qǐng)大神告之原因。
2013-08-31 20:20:49
5腳增量式旋轉(zhuǎn)編碼器,想測(cè)轉(zhuǎn)角和轉(zhuǎn)數(shù),完全沒(méi)有頭緒,接線(xiàn)也有疑問(wèn),知道怎么弄的快來(lái)!!
2016-08-28 11:53:30
利用Arduino、增量式光電編碼器測(cè)量速度、方向、位移。材料:Arduino mega 2560分辨率256ABZ相增量式編碼器pc編碼器...
2021-09-03 06:02:43
增量式編碼器工作原理是什么?增量式編碼器的結(jié)構(gòu)是由哪些部分組成的?光電旋轉(zhuǎn)編碼器使用方法是什么?單片機(jī)讀取光柵編碼器角度的方法是什么?
2021-06-30 07:29:18
決這個(gè)問(wèn)題?在IC1引腳(A+)和IC2引腳(B+)上,可以用連接的增量編碼器測(cè)量角速度/速度嗎?我使用的是DSPIC30F4012微控制器。
2020-03-13 09:58:57
有(A&B)二正交信號(hào)及零位信號(hào)(I),同時(shí)有電機(jī)磁極位置信號(hào)U、V、W,該編碼器具有出色的開(kāi)關(guān)精度和高響應(yīng)速度,這使編碼器成為紡織機(jī)的伺服電機(jī)位置檢測(cè)的理想選擇之一。 6通道增量式編碼器48T2
2019-06-14 05:00:01
,不能夠直接檢測(cè)出軸的絕對(duì)位置信息。一般來(lái)說(shuō),增量式光電編碼器輸出A、B 兩相互差90°電度角的脈沖信號(hào)(即所謂的兩組正交輸出信號(hào)),從而可方便地判斷出旋轉(zhuǎn)方向。同時(shí)還有用作參考零位的Z 相標(biāo)志(指示
2010-06-02 23:01:05
,用脈沖的個(gè)數(shù)表示位移的大小。絕對(duì)式編碼器的每一個(gè)位置對(duì)應(yīng)一個(gè)確定的數(shù)字碼,因此它的示值只與測(cè)量的起始和終止位置有關(guān),而與測(cè)量的中間過(guò)程無(wú)關(guān)。 1、增量式 增量式編碼器通常有3個(gè)輸出口,分別為A相、B相
2016-06-27 16:43:31
對(duì)這些脈沖進(jìn)行跟蹤或計(jì)數(shù)。圖 2:增量編碼器產(chǎn)生具有 90° 相位差的脈沖波形。(圖片來(lái)源:CUI, Inc.)增量編碼器的分辨率以每轉(zhuǎn)脈沖數(shù) (PPR) 表示,相當(dāng)于任一方波輸出的高脈沖數(shù)。您可以閱讀
2018-12-20 16:31:09
做到多圈旋轉(zhuǎn)位置測(cè)量。增量式編碼器是直接利用光電轉(zhuǎn)換原理輸出三組方波脈沖A、B和Z相。由一個(gè)中心有軸的光電碼盤(pán),其上有環(huán)形通、暗的刻線(xiàn),有光電發(fā)射和接收器件讀取,獲得兩組正弦波信號(hào)組合成A、B,每個(gè)
2023-04-20 16:19:54
那個(gè)增量式編碼器輸出的信號(hào)然后怎么通過(guò)無(wú)線(xiàn)模塊發(fā)射出去
2012-04-17 23:31:38
,不宜實(shí)現(xiàn)小型化。增量式光電編碼器不具有計(jì)數(shù)和接口電路,一般輸出A、B、Z脈沖信號(hào),價(jià)格較低,在實(shí)際工程中比較常用。文中設(shè)計(jì)了一個(gè)基于FPGA的簡(jiǎn)單且精度高的接口電路,其結(jié)構(gòu)簡(jiǎn)單、性能可靠。具有濾波
2019-06-10 05:00:08
增量 型 編 碼器是一種角位移和角速度測(cè)量元件,可以直接將角位移或角速度變成相應(yīng)的脈沖序列信號(hào),在檢測(cè)物體的位移和角度等方面有著廣泛的應(yīng)用。增量型編碼器有A,B,Z三相
2008-10-19 16:49:21 45
45 ;其中RCI58B開(kāi)頭的型號(hào),說(shuō)明了是增量型,外徑尺寸58mm,盲孔;RCI58B法國(guó)雷恩Precilec增量編碼器主要是用來(lái)精確測(cè)量轉(zhuǎn)軸的速度,位置在工業(yè)環(huán)境中,比
2022-06-13 09:17:26
如果要在增量型編碼器后方安裝額外的部件,就可以使用RHI 74產(chǎn)品線(xiàn)系列的增量型編碼器.為此,該旋轉(zhuǎn)編碼器使用一個(gè)安全穿過(guò)本體的空心軸套.該增量型旋轉(zhuǎn)編碼器直接安裝
2010-10-08 07:49:5545
增量型編碼器相位差輸出電路
2009-04-26 12:04:361864 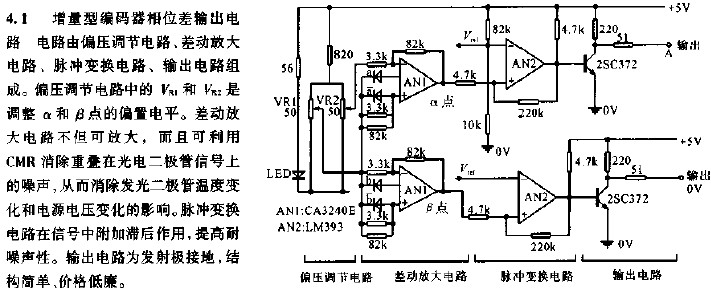
SPMC75增量編碼器接口應(yīng)用
增量式編碼器是直接利用光電轉(zhuǎn)換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90o,從而可方便地判斷出旋轉(zhuǎn)方向,而Z相為每轉(zhuǎn)一
2009-09-19 10:30:071119 
如何使用增量編碼器
1,增量型旋轉(zhuǎn)編碼器有分辨率的差異,使用每圈產(chǎn)生的脈沖數(shù)來(lái)計(jì)量,數(shù)目從6到5400或更高,脈沖數(shù)越多,分辨
2009-09-26 17:35:044057 增量型編碼器與絕對(duì)型編碼器的區(qū)別
編碼器如以信號(hào)原理來(lái)分,有增量型編碼器,絕對(duì)型編碼器。 增 量 型 編 碼 器 (旋轉(zhuǎn)
2009-09-26 17:36:292348 增量光電編碼器基本波形和電路圖
增量編碼器是以脈沖形式輸出的傳感器,其碼盤(pán)比絕對(duì)編碼器碼盤(pán)要簡(jiǎn)單得多
2009-10-29 22:55:062247 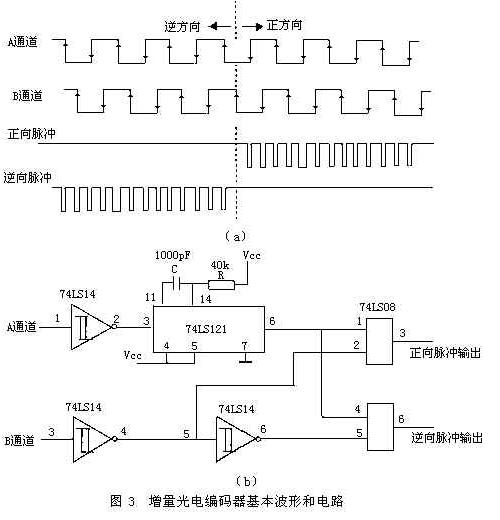
增量編碼器
增量編碼器又稱(chēng)脈沖編碼器,其結(jié)構(gòu)簡(jiǎn)單,一般只有三個(gè)碼道,不能直接產(chǎn)生幾位編碼輸出,如圖12.3.2所示。它是一個(gè)被劃分成若干個(gè)交替透明和
2009-10-29 23:05:144374 針對(duì)目前增量式光電編碼器辨向計(jì)數(shù)電路脈沖或抖動(dòng)干擾抑制能力差的問(wèn)題,提出了一種基于有限狀態(tài)機(jī)的編碼器接口電路設(shè)計(jì)方案,并給出了硬件實(shí)現(xiàn)。首先將光電編碼器輸出的A、
2011-09-07 14:52:07169 分析機(jī)械式增量型編碼器的毛刺產(chǎn)生機(jī)理,結(jié)合編碼器有效旋轉(zhuǎn)波形和幾種毛刺波形的特點(diǎn),提出一種新的去毛刺算法,在編碼器的相位超前輸出端的下降沿,判斷一次相位滯后端的輸
2011-09-07 14:59:5480 分析了光電編碼器4倍頻原理,提出了一種基于可編程邏輯器件FPGA對(duì)光電增量式編碼器輸出信號(hào)4倍頻、鑒相、計(jì)數(shù)的具體方法,它對(duì)提高編碼器分辨率與實(shí)現(xiàn)高精度、高穩(wěn)定性的信號(hào)檢測(cè)
2011-11-03 15:13:1675 E100H系列外徑100mm中空軸型增量旋轉(zhuǎn)編碼器的特點(diǎn): 1、超強(qiáng)耐久性 2、高穩(wěn)定輸出 3、適用于電梯行業(yè)
2017-09-28 10:39:329 增量型編碼器就是每轉(zhuǎn)過(guò)單位的角度就發(fā)出一個(gè)脈沖信號(hào)(也有發(fā)正余弦信號(hào),然后對(duì)其進(jìn)行細(xì)分,斬波出頻率更高的脈沖),通常為A相、B相、Z相輸出,A相、B相為相互延遲1/4周期的脈沖輸出,根據(jù)延遲關(guān)系可以
2017-10-23 10:31:563 便捷手搖型增量旋轉(zhuǎn)編碼器特點(diǎn):適用于數(shù)控機(jī)床,磨床等的手動(dòng)脈沖輸入、緊急停止開(kāi)關(guān),ENABLE開(kāi)關(guān)、適用于4位,6位旋轉(zhuǎn)開(kāi)關(guān)。編碼器如以信號(hào)原理來(lái)分,有增量型編碼器,絕對(duì)型編碼器。我們通常用的是增量
2017-10-25 09:47:3219 編碼器把角位移或直線(xiàn)位移轉(zhuǎn)換成電信號(hào),前者稱(chēng)為碼盤(pán),后者稱(chēng)為碼尺。按照讀出方式編碼器可以分為接觸式和非接觸式兩種;按照工作原理編碼器可分為增量式和絕對(duì)式兩類(lèi)。
2018-02-05 09:38:4532078 本文主要闡述了增量式編碼器與絕對(duì)式編碼器的區(qū)別。
2019-11-06 14:56:4060890 首先在增量式編碼器安裝設(shè)備之前需要的是要對(duì)周邊環(huán)境做一個(gè)系統(tǒng)的清潔,設(shè)備周?chē)沫h(huán)境都需注意做好相對(duì)應(yīng)的清潔措施。這樣可以更好保證編碼器的工作運(yùn)行。常用的增量式編碼器與一般的設(shè)備的電機(jī)軸有兩種的安裝
2019-11-06 15:20:556990 絕對(duì)編碼器這是能將電動(dòng)機(jī)一轉(zhuǎn)內(nèi)的角度數(shù)據(jù)輸出到外部目標(biāo)的檢測(cè)器。絕對(duì)編碼器一般能夠以8到12位輸出360 °絕對(duì)值編碼器與增量編碼器工作原理非常相似。
2019-12-04 11:06:1826367 光電增量編碼器的工作原理是直接利用光電轉(zhuǎn)換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90度,從而可方便地判斷出旋轉(zhuǎn)方向,而Z相為每轉(zhuǎn)一個(gè)脈沖,用于基準(zhǔn)點(diǎn)定位。
2020-03-22 16:48:0011828 增量式旋轉(zhuǎn)編碼器沒(méi)有固定的起始零點(diǎn),輸出的是與轉(zhuǎn)角的增量成正比的脈沖,需要用計(jì)數(shù)器來(lái)計(jì)脈沖數(shù)。
2020-03-21 11:43:339543 增量式編碼器 增量式編碼器是直接利用光電轉(zhuǎn)換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90度,從而可方便的判斷出旋轉(zhuǎn)方向,而Z相為每轉(zhuǎn)一個(gè)脈沖,用于基準(zhǔn)點(diǎn)定位。
2020-10-15 11:14:087798 相編碼器,PLC可以很容易地識(shí)別出轉(zhuǎn)軸旋轉(zhuǎn)的方向。增量編碼器方向的改變主要是看A、B輸入的波形符合下圖那種情況。
2021-05-13 15:24:0222742 
, 說(shuō)明如何添加增量型旋轉(zhuǎn)編碼器的驅(qū)動(dòng),本文不對(duì)驅(qū)動(dòng)操作硬件的實(shí)現(xiàn)細(xì)節(jié)進(jìn)行說(shuō)明。 增量型旋轉(zhuǎn)編碼器硬件要點(diǎn) 本文使用的是KY-040旋轉(zhuǎn)編碼器,詳細(xì)信息見(jiàn)文末參考 button引腳是一個(gè)對(duì)地的開(kāi)關(guān),按壓時(shí)接地 旋轉(zhuǎn)時(shí)A/B輸出有相差的正交脈沖。 旋轉(zhuǎn)一圈產(chǎn)生
2021-07-28 09:55:281930 閱讀目錄一、增量式旋轉(zhuǎn)編碼器二、硬件設(shè)計(jì)三、軟件設(shè)計(jì)Development kit:MDK5.14IDE:UV4MCU:STM32F103C8T6回到頂部一、增量式旋轉(zhuǎn)編碼器1、簡(jiǎn)介編碼器
2021-11-22 20:06:0344 根據(jù)檢測(cè)原理,編碼器可分為光學(xué)式、磁式、感應(yīng)式和電容式,根據(jù)其刻度方法及信號(hào)輸出形式,可分為增量式、絕對(duì)式以及混合式三種。
2022-12-15 14:17:143910 增量式編碼器在實(shí)際應(yīng)用中還是很常見(jiàn)。stm32的定時(shí)器帶的也有編碼器模式。所用的編碼器是有ABZ三相,其中ab相是用來(lái)計(jì)數(shù),z相輸出零點(diǎn)信號(hào)。AB相根據(jù)旋轉(zhuǎn)的方向不同,輸出的波形如下圖所示。
2023-01-19 09:14:007086 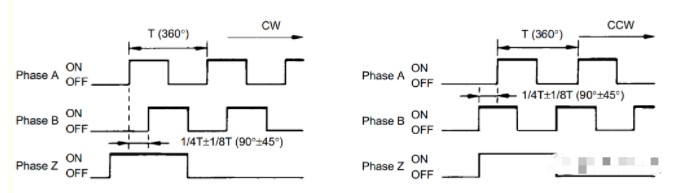
增量式編碼器是能夠依據(jù)旋轉(zhuǎn)運(yùn)動(dòng)形成信號(hào)的編碼器,其刻度方式為每一個(gè)脈沖都進(jìn)行增量測(cè)算,因此得名。是能夠依據(jù)旋轉(zhuǎn)運(yùn)動(dòng)形成信號(hào)的編碼器,其刻度方式為每一個(gè)脈沖都進(jìn)行增量測(cè)算,因此得名。
2023-02-16 17:37:403859 增量式編碼器和絕對(duì)值編碼器哪個(gè)好? 編碼器是伺服系統(tǒng)上的重要組成部分,可以發(fā)送脈沖給驅(qū)動(dòng)器,用于運(yùn)動(dòng)位置的矯正,實(shí)現(xiàn)閉環(huán)控制。目前,常見(jiàn)的伺服編碼器類(lèi)型有增量式編碼器以及絕對(duì)值編碼器兩種,它們哪個(gè)
2023-03-19 23:30:032562 隨著工業(yè)4.0發(fā)展需求,工業(yè)機(jī)器人產(chǎn)業(yè)前所未有的崛起,現(xiàn)在在機(jī)器人控制系統(tǒng)中,伺服電機(jī)扮演者重要角色,這樣一來(lái)編碼器重要性尤為突出,下面讓我?guī)Т蠹艺J(rèn)識(shí)一下絕對(duì)編碼器與增量編碼器。
2023-03-28 09:33:31704 隨著工業(yè)4.0發(fā)展需求,工業(yè)機(jī)器人產(chǎn)業(yè)前所未有的崛起,現(xiàn)在在機(jī)器人控制系統(tǒng)中,伺服電機(jī)扮演者重要角色,這樣一來(lái)編碼器重要性尤為突出,下面讓我?guī)Т蠹艺J(rèn)識(shí)一下絕對(duì)編碼器與增量編碼器。
2023-03-28 09:27:19555 增量式編碼器一般分為3種類(lèi)型:?jiǎn)瓮ǖ?b class="flag-6" style="color: red">增量式編碼器,雙通道增量式編碼器,三通道增量式編碼器。
2023-04-17 09:43:143791 增量式編碼器在實(shí)際應(yīng)用中還是很常見(jiàn)。stm32的定時(shí)器帶的也有編碼器模式。所用的編碼器是有ABZ三相,其中ab相是用來(lái)計(jì)數(shù),z相輸出零點(diǎn)信號(hào)。AB相根據(jù)旋轉(zhuǎn)的方向不同,輸出的波形如下圖所示:
2023-06-01 14:36:103623 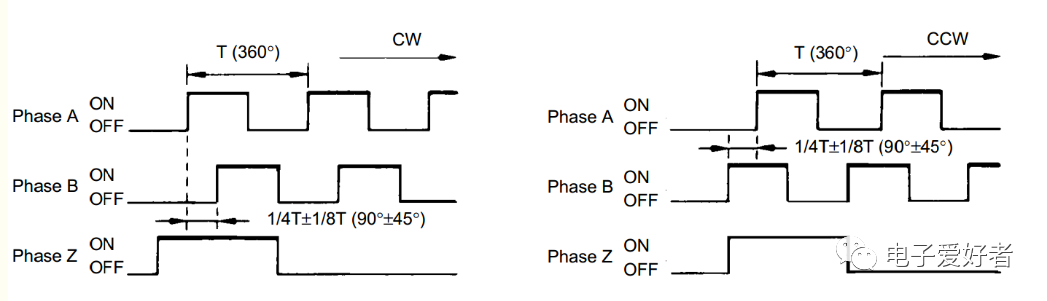
增量式編碼器是能夠依據(jù)旋轉(zhuǎn)運(yùn)動(dòng)形成信號(hào)的編碼器,其刻度方式為每一個(gè)脈沖都進(jìn)行增量測(cè)算,因此得名。它常與機(jī)械設(shè)備轉(zhuǎn)換裝置搭配使用(如齒條-齒輪、精確測(cè)量輪或心軸搭配使用),用以精確測(cè)量直線(xiàn)運(yùn)動(dòng)。增量式編碼器是把位移轉(zhuǎn)換成周期性的電信號(hào),然后把這個(gè)電信號(hào)轉(zhuǎn)化成計(jì)數(shù)脈沖,用脈沖的個(gè)數(shù)表示位移的大小。
2023-04-17 15:39:051620 
增量型編碼器與絕對(duì)值型編碼器怎么選擇?在進(jìn)行編碼器選擇時(shí),增量型編碼器和絕對(duì)值型編碼器是兩種常見(jiàn)的選擇。增量型編碼器是一種基于脈沖計(jì)數(shù)的編碼器,通常由光電編碼器和霍爾編碼器組成。這種編碼器的主要優(yōu)點(diǎn)
2023-05-08 11:28:331341 
增量式編碼器和絕對(duì)值編碼器有哪些區(qū)別?增量式編碼器通過(guò)對(duì)變化量進(jìn)行計(jì)數(shù)來(lái)測(cè)量位置變化,而絕對(duì)值編碼器可提供實(shí)際位置值。因此,增量式編碼器對(duì)于測(cè)量無(wú)限循環(huán)的運(yùn)動(dòng)比較有用,因?yàn)樗鼈兛梢允褂糜?jì)數(shù)器來(lái)跟蹤旋轉(zhuǎn)次數(shù)和速度。相比之下,絕對(duì)值編碼器適用于任務(wù)需要直接獲得位置信息的情景,如機(jī)器人運(yùn)動(dòng)。
2023-07-05 13:34:282249 
增量式編碼器的分辨率是以編碼器軸轉(zhuǎn)動(dòng)一周所產(chǎn)生的輸出信號(hào)基本周期數(shù)來(lái)表示的,即脈沖數(shù)/轉(zhuǎn)(PPR)。本文主要介紹選擇增量編碼器分辨率的方法以及影響增量式編碼器分辨率的因素。
2023-07-26 09:59:56726 當(dāng)前位置的。它們通常包含兩個(gè)輸出信號(hào)通道,一個(gè)用于測(cè)量位置變化的方向,另一個(gè)用于計(jì)數(shù)脈沖。增量型編碼器的工作原理是通過(guò)計(jì)算脈沖數(shù)和方向來(lái)確定位置變化。因此,它們需要
2023-08-18 14:43:50477 
增量式編碼器提供了一種對(duì)連續(xù)位移量離散化、增量化以及位移變化(速度)的傳感方法。增量式編碼器的特點(diǎn)是每產(chǎn)生一個(gè)增量位移就對(duì)應(yīng)于一個(gè)輸出脈沖信號(hào)。增量式編碼器測(cè)量的是相對(duì)于某個(gè)基準(zhǔn)點(diǎn)的相對(duì)位置增量,而不能夠直接檢測(cè)出絕對(duì)位置信息。
2023-10-26 10:44:511968 
? ? ? 增量式編碼器是一種將位移轉(zhuǎn)換成周期性的電信號(hào),再把這個(gè)電信號(hào)轉(zhuǎn)變成計(jì)數(shù)脈沖的裝置,用脈沖的個(gè)數(shù)表示位移的大小。增量式編碼器沒(méi)有固定的起始零點(diǎn),輸出的是與轉(zhuǎn)角的增量成正比的脈沖,需要用
2024-03-05 08:43:41146 
 電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論