 電子發(fā)燒友App
電子發(fā)燒友App


今天通過圖文的形式給大家講解什么是PID?PID各個(gè)參數(shù)有什么作用?哪些場(chǎng)合會(huì)用到PID?快來(lái)一起學(xué)習(xí)一下吧!
啥是PID?
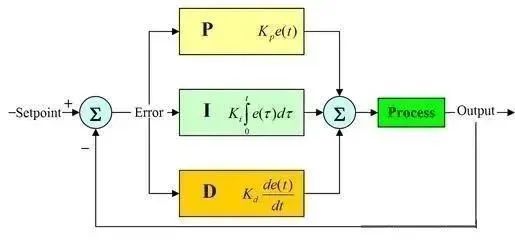
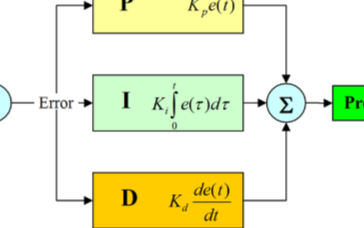
PID,就是“比例(proportional)、積分(integral)、微分(derivative)”,是一種很常見的控制算法。
PID已經(jīng)有107年的歷史了,它并不是什么很神圣的東西,大家一定都見過PID的實(shí)際應(yīng)用。
比如四軸飛行器,再比如平衡小車......還有汽車的定速巡航、3D打印機(jī)上的溫度控制器....
就是類似于這種:需要將某一個(gè)物理量“保持穩(wěn)定”的場(chǎng)合(比如維持平衡,穩(wěn)定溫度、轉(zhuǎn)速等),PID都會(huì)派上大用場(chǎng)。
那么問題來(lái)了:
比如,我想控制一個(gè)“熱得快”,讓一鍋水的溫度保持在50℃,這么簡(jiǎn)單的任務(wù),為啥要用到微積分的理論呢。
你一定在想:
這不是so easy嘛~ 小于50度就讓它加熱,大于50度就斷電,不就行了?幾行代碼用Arduino分分鐘寫出來(lái)。
沒錯(cuò)~在要求不高的情況下,確實(shí)可以這么干~ But!如果換一種說法,你就知道問題出在哪里了:
如果我的控制對(duì)象是一輛汽車呢?
要是希望汽車的車速保持在50km/h不動(dòng),你還敢這樣干么。
設(shè)想一下,假如汽車的定速巡航電腦在某一時(shí)間測(cè)到車速是45km/h。它立刻命令發(fā)動(dòng)機(jī):加速!
結(jié)果,發(fā)動(dòng)機(jī)那邊突然來(lái)了個(gè)100%全油門,嗡的一下,汽車急加速到了60km/h。
這時(shí)電腦又發(fā)出命令:剎車!
結(jié)果,吱...............哇............(乘客吐)
所以,在大多數(shù)場(chǎng)合中,用“開關(guān)量”來(lái)控制一個(gè)物理量,就顯得比較簡(jiǎn)單粗暴了。有時(shí)候,是無(wú)法保持穩(wěn)定的。因?yàn)?a target="_blank">單片機(jī)、傳感器不是無(wú)限快的,采集、控制需要時(shí)間。
而且,控制對(duì)象具有慣性。比如你將一個(gè)加熱器拔掉,它的“余熱”(即熱慣性)可能還會(huì)使水溫繼續(xù)升高一小會(huì)。
三個(gè)控制環(huán)節(jié)的作用
我們先只說PID控制器的三個(gè)最基本的參數(shù):kP,kI,kD。
kP的作用:
P就是比例的意思。它的作用最明顯,原理也最簡(jiǎn)單。我們先說這個(gè):
需要控制的量,比如水溫,有它現(xiàn)在的『當(dāng)前值』,也有我們期望的『目標(biāo)值』。
當(dāng)兩者差距不大時(shí),就讓加熱器“輕輕地”加熱一下。
要是因?yàn)槟承┰颍瑴囟冉档土撕芏啵妥尲訜崞?strong>“稍稍用力”加熱一下。
要是當(dāng)前溫度比目標(biāo)溫度低得多,就讓加熱器“開足馬力”加熱,盡快讓水溫到達(dá)目標(biāo)附近。
這就是P的作用,跟開關(guān)控制方法相比,是不是“溫文爾雅”了很多
實(shí)際寫程序時(shí),就讓偏差(目標(biāo)減去當(dāng)前)與調(diào)節(jié)裝置的“調(diào)節(jié)力度”,建立一個(gè)一次函數(shù)的關(guān)系,就可以實(shí)現(xiàn)最基本的“比例”控制了~
kP越大,調(diào)節(jié)作用越激進(jìn),kP調(diào)小會(huì)讓調(diào)節(jié)作用更保守。
要是你正在制作一個(gè)平衡車,有了P的作用,你會(huì)發(fā)現(xiàn),平衡車在平衡角度附近來(lái)回“狂抖”,比較難穩(wěn)住。
如果已經(jīng)到了這一步——恭喜你!離成功只差一小步了~
kD的作用:
D的作用更好理解一些,所以先說說D,最后說I。
剛才我們有了P的作用。你不難發(fā)現(xiàn),只有P好像不能讓平衡車站起來(lái),水溫也控制得晃晃悠悠,好像整個(gè)系統(tǒng)不是特別穩(wěn)定,總是在“抖動(dòng)”。
你心里設(shè)想一個(gè)彈簧:現(xiàn)在在平衡位置上。拉它一下,然后松手。這時(shí)它會(huì)震蕩起來(lái)。因?yàn)樽枇苄。赡軙?huì)震蕩很長(zhǎng)時(shí)間,才會(huì)重新停在平衡位置。
請(qǐng)想象一下:要是把上圖所示的系統(tǒng)浸沒在水里,同樣拉它一下 :這種情況下,重新停在平衡位置的時(shí)間就短得多。
我們需要一個(gè)控制作用,讓被控制的物理量的“變化速度”趨于0,即類似于“阻尼”的作用。
因?yàn)椋?dāng)比較接近目標(biāo)時(shí),P的控制作用就比較小了。越接近目標(biāo),P的作用越溫柔。有很多內(nèi)在的或者外部的因素,使控制量發(fā)生小范圍的擺動(dòng)。
D的作用就是讓物理量的速度趨于0,只要什么時(shí)候,這個(gè)量具有了速度,D就向相反的方向用力,盡力剎住這個(gè)變化。
kD參數(shù)越大,向速度相反方向剎車的力道就越強(qiáng)。
如果是平衡小車,加上P和D兩種控制作用,如果參數(shù)調(diào)節(jié)合適,它應(yīng)該可以站起來(lái)了~歡呼吧。
等等,PID三兄弟好像還有一位。看起來(lái)PD就可以讓物理量保持穩(wěn)定,那還要I干嘛?
因?yàn)槲覀兒鲆暳艘环N重要的情況:
kI的作用:
還是以熱水為例。假如有個(gè)人把我們的加熱裝置帶到了非常冷的地方,開始燒水了。需要燒到50℃。
在P的作用下,水溫慢慢升高。直到升高到45℃時(shí),他發(fā)現(xiàn)了一個(gè)不好的事情:天氣太冷,水散熱的速度,和P控制的加熱的速度相等了。
這可怎么辦?
P兄這樣想:我和目標(biāo)已經(jīng)很近了,只需要輕輕加熱就可以了。
D兄這樣想:加熱和散熱相等,溫度沒有波動(dòng),我好像不用調(diào)整什么。
于是,水溫永遠(yuǎn)地停留在45℃,永遠(yuǎn)到不了50℃。
作為一個(gè)人,根據(jù)常識(shí),我們知道,應(yīng)該進(jìn)一步增加加熱的功率。可是增加多少該如何計(jì)算呢?
前輩科學(xué)家們想到的方法是真的巧妙。
設(shè)置一個(gè)積分量。只要偏差存在,就不斷地對(duì)偏差進(jìn)行積分(累加),并反應(yīng)在調(diào)節(jié)力度上。
這樣一來(lái),即使45℃和50℃相差不太大,但是隨著時(shí)間的推移,只要沒達(dá)到目標(biāo)溫度,這個(gè)積分量就不斷增加。系統(tǒng)就會(huì)慢慢意識(shí)到:還沒有到達(dá)目標(biāo)溫度,該增加功率啦!
到了目標(biāo)溫度后,假設(shè)溫度沒有波動(dòng),積分值就不會(huì)再變動(dòng)。這時(shí),加熱功率仍然等于散熱功率。但是,溫度是穩(wěn)穩(wěn)的50℃。
kI的值越大,積分時(shí)乘的系數(shù)就越大,積分效果越明顯。
所以,I的作用就是,減小靜態(tài)情況下的誤差,讓受控物理量盡可能接近目標(biāo)值。
I在使用時(shí)還有個(gè)問題:需要設(shè)定積分限制。防止在剛開始加熱時(shí),就把積分量積得太大,難以控制。
PID控制原理:
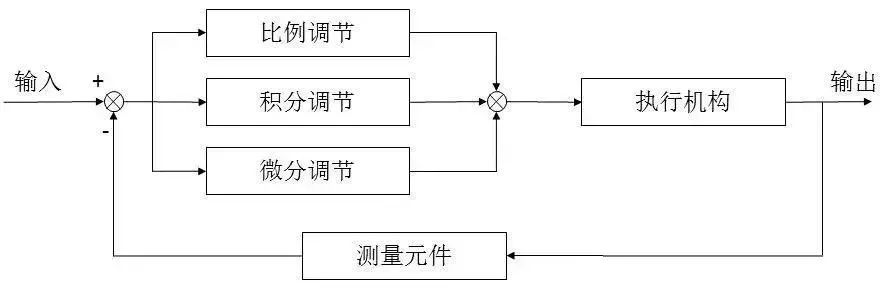
1、比例(P)控制比例控制是一種最簡(jiǎn)單的控制方式。其控制器的輸出與輸入誤差信號(hào)成比例關(guān)系。當(dāng)僅有比例控制時(shí)系統(tǒng)輸出存在穩(wěn)態(tài)誤差。
2、積分(I)控制在積分控制中,控制器的輸出與輸入誤差信號(hào)的積分成正比關(guān)系。對(duì)一個(gè)自動(dòng)控制系統(tǒng),如果在進(jìn)入穩(wěn)態(tài)后存在穩(wěn)態(tài)誤差,則稱這個(gè)控制系統(tǒng)是有穩(wěn)態(tài)誤差的或簡(jiǎn)稱有差系統(tǒng)。為了消除穩(wěn)態(tài)誤差,在控制器中必須引入“積分項(xiàng)”。積分項(xiàng)對(duì)誤差取決于時(shí)間的積分,隨著時(shí)間的增加,積分項(xiàng)會(huì)增大。這樣,即便誤差很小,積分項(xiàng)也會(huì)隨著時(shí)間的增加而加大,它推動(dòng)控制器的輸出增大使穩(wěn)態(tài)誤差進(jìn)一步減小,直到等于零。因此,比例+積分(PI)控制器,可以使系統(tǒng)在進(jìn)入穩(wěn)態(tài)后無(wú)穩(wěn)態(tài)誤差。
3、微分(D)控制在微分控制中,控制器的輸出與輸入誤差信號(hào)的微分(即誤差的變化率)成正比關(guān)系。自動(dòng)控制系統(tǒng)在克服誤差的調(diào)節(jié)過程中可能會(huì)出現(xiàn)振蕩甚至失穩(wěn)。
其原因是由于存在有較大慣性組件(環(huán)節(jié))或有滯后組件,具有抑制誤差的作用,其變化總是落后于誤差的變化。
解決的辦法是使抑制誤差的作用的變化“超前”,即在誤差接近零時(shí),抑制誤差的作用就應(yīng)該是零。這就是說,在控制器中僅引入“比例”項(xiàng)往往是不夠的,比例項(xiàng)的作用僅是放大誤差的幅值,而目前需要增加的是“微分項(xiàng)”,它能預(yù)測(cè)誤差變化的趨勢(shì)。
這樣,具有比例+微分的控制器,就能夠提前使抑制誤差的控制作用等于零,甚至為負(fù)值,從而避免了被控量的嚴(yán)重超調(diào)。所以對(duì)有較大慣性或滯后的被控對(duì)象,比例+微分(PD)控制器能改善系統(tǒng)在調(diào)節(jié)過程中的動(dòng)態(tài)特性。
PID控制器參數(shù)整定的一般方法:
PID控制器的參數(shù)整定是控制系統(tǒng)設(shè)計(jì)的核心內(nèi)容。它是根據(jù)被控過程的特性確定PID控制器的比例系數(shù)、積分時(shí)間和微分時(shí)間的大小。PID控制器參數(shù)整定的方法很多,概括起來(lái)有兩大類:
理論計(jì)算整定法
它主要是依據(jù)系統(tǒng)的數(shù)學(xué)模型,經(jīng)過理論計(jì)算確定控制器參數(shù)。這種方法所得到的計(jì)算數(shù)據(jù)未必可以直接用,還必須通過工程實(shí)際進(jìn)行調(diào)整和修改;
工程整定方法
它主要依賴工程經(jīng)驗(yàn),直接在控制系統(tǒng)的試驗(yàn)中進(jìn)行,且方法簡(jiǎn)單、易于掌握,在工程實(shí)際中被廣泛采用。PID控制器參數(shù)的工程整定方法,主要有臨界比例法、反應(yīng)曲線法和衰減法。
三種方法各有其特點(diǎn),其共同點(diǎn)都是通過試驗(yàn),然后按照工程經(jīng)驗(yàn)公式對(duì)控制器參數(shù)進(jìn)行整定。但無(wú)論采用哪一種方法所得到的控制器參數(shù),都需要在實(shí)際運(yùn)行中進(jìn)行最后調(diào)整與完善。
現(xiàn)在一般采用的是臨界比例法。利用該方法進(jìn)行 PID控制器參數(shù)的整定步驟如下:* 首先預(yù)選擇一個(gè)足夠短的采樣周期讓系統(tǒng)工作;
僅加入比例控制環(huán)節(jié),直到系統(tǒng)對(duì)輸入的階躍響應(yīng)出現(xiàn)臨界振蕩,記下這時(shí)的比例放大系數(shù)和臨界振蕩周期;
在一定的控制度下通過公式計(jì)算得到PID控制器的參數(shù)。
PID參數(shù)的設(shè)定:是靠經(jīng)驗(yàn)及工藝的熟悉,參考測(cè)量值跟蹤與設(shè)定值曲線,從而調(diào)整P、I、D的大小。
書上的常用口訣:
參數(shù)整定找最佳,從小到大順序查;?? ?? 先是比例后積分,最后再把微分加;?? ?? 曲線振蕩很頻繁,比例度盤要放大;?? ?? 曲線漂浮繞大灣,比例度盤往小扳;?? ?? 曲線偏離回復(fù)慢,積分時(shí)間往下降;?? ?? 曲線波動(dòng)周期長(zhǎng),積分時(shí)間再加長(zhǎng);?? ?? 曲線振蕩頻率快,先把微分降下來(lái);?? ?? 動(dòng)差大來(lái)波動(dòng)慢。微分時(shí)間應(yīng)加長(zhǎng);?? ?? 理想曲線兩個(gè)波,前高后低4比1;?
一看二調(diào)多分析,調(diào)節(jié)質(zhì)量不會(huì)低。
個(gè)人認(rèn)為PID參數(shù)的設(shè)置的大小,一方面是要根據(jù)控制對(duì)象的具體情況而定;另一方面是經(jīng)驗(yàn)。P是解決幅值震蕩,P大了會(huì)出現(xiàn)幅值震蕩的幅度大,但震蕩頻率小,系統(tǒng)達(dá)到穩(wěn)定時(shí)間長(zhǎng);I是解決動(dòng)作響應(yīng)的速度快慢的,I大了響應(yīng)速度慢,反之則快;D是消除靜態(tài)誤差的,一般D設(shè)置都比較小,而且對(duì)系統(tǒng)影響比較小。
PID參數(shù)怎樣調(diào)整最佳:
(1)整定比例控制 將比例控制作用由小變到大,觀察各次響應(yīng),直至得到反應(yīng)快、超調(diào)小的響應(yīng)曲線。
(2)整定積分環(huán)節(jié) 若在比例控制下穩(wěn)態(tài)誤差不能滿足要求,需加入積分控制。
先將步驟(1)中選擇的比例系數(shù)減小為原來(lái)的50~80%,再將積分時(shí)間置一個(gè)較大值,觀測(cè)響應(yīng)曲線。然后減小積分時(shí)間,加大積分作用,并相應(yīng)調(diào)整比例系數(shù),反復(fù)試湊至得到較滿意的響應(yīng),確定比例和積分的參數(shù)。
(3)整定微分環(huán)節(jié) 若經(jīng)過步驟(2),PI控制只能消除穩(wěn)態(tài)誤差,而動(dòng)態(tài)過程不能令人滿意,則應(yīng)加入微分控制,構(gòu)成PID控制。先置微分時(shí)間TD=0,逐漸加大TD,同時(shí)相應(yīng)地改變比例系數(shù)和積分時(shí)間,反復(fù)試湊至獲得滿意的控制效果和PID控制參數(shù)。
動(dòng)圖演示
先看動(dòng)圖學(xué)習(xí)一下PID:
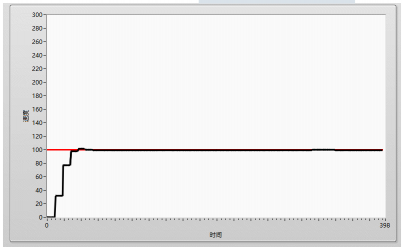
系統(tǒng)初始狀態(tài)為0,目標(biāo)狀態(tài)為10。
先來(lái)展示一下遍歷參數(shù)的過程。
下面的動(dòng)圖都是展示的各個(gè)參數(shù)各自的影響:
?
?
?
?
?
?
在實(shí)際工程中,應(yīng)用最為廣泛的調(diào)節(jié)器控制規(guī)律為比例、積分、微分控制,簡(jiǎn)稱PID控制,又稱PID調(diào)節(jié)。PID控制器問世至今以其結(jié)構(gòu)簡(jiǎn)單、穩(wěn)定性好、工作可靠、調(diào)整方便而成為工業(yè)控制的主要技術(shù)之一。
PID調(diào)節(jié)控制是一個(gè)傳統(tǒng)控制方法,它適用于溫度、壓力、流量、液位等幾乎所有現(xiàn)場(chǎng),不同的現(xiàn)場(chǎng),僅僅是PID參數(shù)應(yīng)設(shè)置不同,只要參數(shù)設(shè)置得當(dāng)均可以達(dá)到很好的效果。均可以達(dá)到0.1%,甚至更高的控制要求。
PID的故事
小明接到這樣一個(gè)任務(wù):有一個(gè)水缸點(diǎn)漏水(而且漏水的速度還不一定固定不變),要求水面高度維持在某個(gè)位置,一旦發(fā)現(xiàn)水面高度低于要求位置,就要往水缸里加水。
小明接到任務(wù)后就一直守在水缸旁邊,時(shí)間長(zhǎng)就覺得無(wú)聊,就跑到房里看小說了,每30分鐘來(lái)檢查一次水面高度。
水漏得太快,每次小明來(lái)檢查時(shí),水都快漏完了,離要求的高度相差很遠(yuǎn),小明改為每3分鐘來(lái)檢查一次,結(jié)果每次來(lái)水都沒怎么漏,不需要加水,來(lái)得太頻繁做的是無(wú)用功。
幾次試驗(yàn)后,確定每10分鐘來(lái)檢查一次。這個(gè)檢查時(shí)間就稱為采樣周期。
開始小明用瓢加水,水龍頭離水缸有十幾米的距離,經(jīng)常要跑好幾趟才加夠水,于是小明又改為用桶加,一加就是一桶,跑的次數(shù)少了,加水的速度也快了,但好幾次將缸給加溢出了,不小心弄濕了幾次鞋,小明又動(dòng)腦筋,我不用瓢也不用桶,老子用盆,幾次下來(lái),發(fā)現(xiàn)剛剛好,不用跑太多次,也不會(huì)讓水溢出。這個(gè)加水工具的大小就稱為比例系數(shù)。
小明又發(fā)現(xiàn)水雖然不會(huì)加過量溢出了,有時(shí)會(huì)高過要求位置比較多,還是有打濕鞋的危險(xiǎn)。
他又想了個(gè)辦法,在水缸上裝一個(gè)漏斗,每次加水不直接倒進(jìn)水缸,而是倒進(jìn)漏斗讓它慢慢加。這樣溢出的問題解決了,但加水的速度又慢了,有時(shí)還趕不上漏水的速度。
于是他試著變換不同大小口徑的漏斗來(lái)控制加水的速度,最后終于找到了滿意的漏斗。漏斗的時(shí)間就稱為積分時(shí)間。
小明終于喘了一口,但任務(wù)的要求突然嚴(yán)了,水位控制的及時(shí)性要求大大提高,一旦水位過低,必須立即將水加到要求位置,而且不能高出太多,否則不給工錢。小明又為難了!
于是他又開動(dòng)腦筋,終于讓它想到一個(gè)辦法,常放一盆備用水在旁邊,一發(fā)現(xiàn)水位低了,不經(jīng)過漏斗就是一盆水下去,這樣及時(shí)性是保證了,但水位有時(shí)會(huì)高多了。
他又在要求水面位置上面一點(diǎn)將水鑿一孔,再接一根管子到下面的備用桶里這樣多出的水會(huì)從上面的孔里漏出來(lái)。這個(gè)水漏出的快慢就稱為微分時(shí)間。
看到幾個(gè)問采樣周期的帖子,臨時(shí)想了這么個(gè)故事。微分的比喻一點(diǎn)牽強(qiáng),不過能幫助理解就行了,呵呵,入門級(jí)的,如能幫助新手理解下PID,于愿足矣。
故事中小明的試驗(yàn)是一步步獨(dú)立做,但實(shí)際加水工具、漏斗口徑、溢水孔的大小同時(shí)都會(huì)影響加水的速度,水位超調(diào)量的大小,做了后面的實(shí)驗(yàn)后,往往還要修改改前面實(shí)驗(yàn)的結(jié)果。
故事中小明的試驗(yàn)是一步步獨(dú)立做,但實(shí)際加水工具、漏斗口徑、溢水孔的大小同時(shí)都會(huì)影響加水的速度,水位超調(diào)量的大小,做了后面的實(shí)驗(yàn)后,往往還要修改改前面實(shí)驗(yàn)的結(jié)果。
人以PID控制的方式用水壺往水杯里倒印有刻度的半杯水后停下;
設(shè)定值:水杯的半杯刻度;
實(shí)際值:水杯的實(shí)際水量;
輸出值:水壺倒出水量和水杯舀出水量;
測(cè)量:人的眼睛(相當(dāng)于傳感器)
執(zhí)行對(duì)象:人
正執(zhí)行:倒水
反執(zhí)行:舀水
(1)P比例控制
就是人看到水杯里水量沒有達(dá)到水杯的半杯刻度,就按照一定水量從水壺里往水杯里倒水或者水杯的水量多過刻度,就以一定水量從水杯里舀水出來(lái),這個(gè)一個(gè)動(dòng)作可能會(huì)造成不到半杯或者多了半杯就停下來(lái)。
說明:P比例控制是一種最簡(jiǎn)單的控制方式。其控制器的輸出與輸入誤差信號(hào)成比例關(guān)系。當(dāng)僅有比例控制時(shí)系統(tǒng)輸出存在穩(wěn)態(tài)誤差(Steady-state error)。
(2)PI積分控制
就是按照一定水量往水杯里倒,如果發(fā)現(xiàn)杯里的水量沒有刻度就一直倒,后來(lái)發(fā)現(xiàn)水量超過了半杯,就從杯里往外面舀水,然后反復(fù)不夠就倒水,多了就舀水,直到水量達(dá)到刻度。
說明:在積分I控制中,控制器的輸出與輸入誤差信號(hào)的積分成正比關(guān)系。對(duì)一個(gè)自動(dòng)控制系統(tǒng),如果在進(jìn)入穩(wěn)態(tài)后存在穩(wěn)態(tài)誤差,則稱這個(gè)控制系統(tǒng)是有穩(wěn)態(tài)誤差的或簡(jiǎn)稱有差系統(tǒng)(System with Steady-state Error)。
為了消除穩(wěn)態(tài)誤差,在控制器中必須引入“積分項(xiàng)”。積分項(xiàng)對(duì)誤差取決于時(shí)間的積分,隨著時(shí)間的增加,積分項(xiàng)會(huì)增大。這樣,即便誤差很小,積分項(xiàng)也會(huì)隨著時(shí)間的增加而加大,它推動(dòng)控制器的輸出增大使穩(wěn)態(tài)誤差進(jìn)一步減小,直到等于零。
因此,比例+積分(PI)控制器,可以使系統(tǒng)在進(jìn)入穩(wěn)態(tài)后無(wú)穩(wěn)態(tài)誤差。
(3)PID微分控制
就是人的眼睛看著杯里水量和刻度的距離,當(dāng)差距很大的時(shí)候,就用水壺大水量得倒水,當(dāng)人看到水量快要接近刻度的時(shí)候,就減少水壺的得出水量,慢慢的逼近刻度,直到停留在杯中的刻度。
如果最后能精確停在刻度的位置,就是無(wú)靜差控制;如果停在刻度附近,就是有靜差控制。
說明:在微分控制D中,控制器的輸出與輸入誤差信號(hào)的微分(即誤差的變化率)成正比關(guān)系。
在工程實(shí)際中,應(yīng)用最為廣泛的調(diào)節(jié)器控制規(guī)律為比例、積分、微分控制,簡(jiǎn)稱PID控制,又稱PID調(diào)節(jié)。
PID控制器問世至今已有近70年歷史,它以其結(jié)構(gòu)簡(jiǎn)單、穩(wěn)定性好、工作可靠、調(diào)整方便而成為工業(yè)控制的主要技術(shù)之一。
當(dāng)被控對(duì)象的結(jié)構(gòu)和參數(shù)不能完全掌握,或得不到精確的數(shù)學(xué)模型時(shí),控制理論的其它技術(shù)難以采用時(shí),系統(tǒng)控制器的結(jié)構(gòu)和參數(shù)必須依靠經(jīng)驗(yàn)和現(xiàn)場(chǎng)調(diào)試來(lái)確定,這時(shí)應(yīng)用PID控制技術(shù)最為方便。
即當(dāng)我們不完全了解一個(gè)系統(tǒng)和被控對(duì)象﹐或不能通過有效的測(cè)量手段來(lái)獲得系統(tǒng)參數(shù)時(shí),最適合用PID控制技術(shù)。PID控制,實(shí)際中也有PI和PD控制。
PID控制器就是根據(jù)系統(tǒng)的誤差,利用比例、積分、微分計(jì)算出控制量進(jìn)行控制的。
PID參數(shù)
一、比例(P)控制
比例控制是一種最簡(jiǎn)單的控制方式。其控制器的輸出與輸入誤差信號(hào)成比例關(guān)系。當(dāng)僅有比例控制時(shí)系統(tǒng)輸出存在穩(wěn)態(tài)誤差(Steady-state error)。
二、積分(I)控制
在積分控制中,控制器的輸出與輸入誤差信號(hào)的積分成正比關(guān)系。對(duì)一個(gè)自動(dòng)控制系統(tǒng),如果在進(jìn)入穩(wěn)態(tài)后存在穩(wěn)態(tài)誤差,則稱這個(gè)控制系統(tǒng)是有穩(wěn)態(tài)誤差的或簡(jiǎn)稱有差系統(tǒng)(System with Steady-state Error)。為了消除穩(wěn)態(tài)誤差,在控制器中必須引入“積分項(xiàng)”。積分項(xiàng)對(duì)誤差取決于時(shí)間的積分,隨著時(shí)間的增加,積分項(xiàng)會(huì)增大。這樣,即便誤差很小,積分項(xiàng)也會(huì)隨著時(shí)間的增加而加大,它推動(dòng)控制器的輸出增大使穩(wěn)態(tài)誤差進(jìn)一步減小,直到等于零。因此,比例+積分(PI)控制器,可以使系統(tǒng)在進(jìn)入穩(wěn)態(tài)后無(wú)穩(wěn)態(tài)誤差。
三、微分(D)控制
在微分控制中,控制器的輸出與輸入誤差信號(hào)的微分(即誤差的變化率)成正比關(guān)系。自動(dòng)控制系統(tǒng)在克服誤差的調(diào)節(jié)過程中可能會(huì)出現(xiàn)振蕩甚至失穩(wěn)。
其原因是由于存在有較大慣性組件(環(huán)節(jié))或有滯后(delay)組件,具有抑制誤差的作用,其變化總是落后于誤差的變化。解決的辦法是使抑制誤差的作用的變化“超前”,即在誤差接近零時(shí),抑制誤差的作用就應(yīng)該是零。
這就是說,在控制器中僅引入“比例”項(xiàng)往往是不夠的,比例項(xiàng)的作用僅是放大誤差的幅值,而目前需要增加的是“微分項(xiàng)”,它能預(yù)測(cè)誤差變化的趨勢(shì),這樣,具有比例+微分的控制器,就能夠提前使抑制誤差的控制作用等于零,甚至為負(fù)值,從而避免了被控量的嚴(yán)重超調(diào)。所以對(duì)有較大慣性或滯后的被控對(duì)象,比例+微分(PD)控制器能改善系統(tǒng)在調(diào)節(jié)過程中的動(dòng)態(tài)特性。
在PID參數(shù)進(jìn)行整定時(shí)如果能夠有理論的方法確定PID參數(shù)當(dāng)然是最理想的方法,但是在實(shí)際的應(yīng)用中,更多的是通過湊試法來(lái)確定PID的參數(shù)。
增大比例系數(shù)P一般將加快系統(tǒng)的響應(yīng),在有靜差的情況下有利于減小靜差,但是過大的比例系數(shù)會(huì)使系統(tǒng)有比較大的超調(diào),并產(chǎn)生振蕩,使穩(wěn)定性變壞。
增大積分時(shí)間I有利于減小超調(diào),減小振蕩,使系統(tǒng)的穩(wěn)定性增加,但是系統(tǒng)靜差消除時(shí)間變長(zhǎng)。
增大微分時(shí)間D有利于加快系統(tǒng)的響應(yīng)速度,使系統(tǒng)超調(diào)量減小,穩(wěn)定性增加,但系統(tǒng)對(duì)擾動(dòng)的抑制能力減弱。
在湊試時(shí),可參考以上參數(shù)對(duì)系統(tǒng)控制過程的影響趨勢(shì),對(duì)參數(shù)調(diào)整實(shí)行先比例、后積分,再微分的整定步驟。
PID控制器參數(shù)整定的方法
PID控制器的參數(shù)整定是控制系統(tǒng)設(shè)計(jì)的核心內(nèi)容。它是根據(jù)被控過程的特性確定PID控制器的比例系數(shù)、積分時(shí)間和微分時(shí)間的大小。PID控制器參數(shù)整定的方法很多,概括起來(lái)有兩大類:
一、理論計(jì)算整定法
它主要是依據(jù)系統(tǒng)的數(shù)學(xué)模型,經(jīng)過理論計(jì)算確定控制器參數(shù)。這種方法所得到的計(jì)算數(shù)據(jù)未必可以直接用,還必須通過工程實(shí)際進(jìn)行調(diào)整和修改;
二、工程整定方法
它主要依賴工程經(jīng)驗(yàn),直接在控制系統(tǒng)的試驗(yàn)中進(jìn)行,且方法簡(jiǎn)單、易于掌握,在工程實(shí)際中被廣泛采用。PID控制器參數(shù)的工程整定方法,主要有臨界比例法、反應(yīng)曲線法和衰減法。三種方法各有其特點(diǎn),其共同點(diǎn)都是通過試驗(yàn),然后按照工程經(jīng)驗(yàn)公式對(duì)控制器參數(shù)進(jìn)行整定。但無(wú)論采用哪一種方法所得到的控制器參數(shù),都需要在實(shí)際運(yùn)行中進(jìn)行最后調(diào)整與完善。
現(xiàn)在一般采用的是臨界比例法,利用該方法進(jìn)行 PID控制器參數(shù)的整定步驟如下:
首先預(yù)選擇一個(gè)足夠短的采樣周期讓系統(tǒng)工作;
僅加入比例控制環(huán)節(jié),直到系統(tǒng)對(duì)輸入的階躍響應(yīng)出現(xiàn)臨界振蕩,記下這時(shí)的比例放大系數(shù)和臨界振蕩周期;
在一定的控制度下通過公式計(jì)算得到PID控制器的參數(shù)。
PID參數(shù)的設(shè)定:是靠經(jīng)驗(yàn)及工藝的熟悉,參考測(cè)量值跟蹤與設(shè)定值曲線,從而調(diào)整P、I、D的大小。
常用口訣:
參數(shù)整定找最佳,從小到大順序查;
先是比例后積分,最后再把微分加;
曲線振蕩很頻繁,比例度盤要放大;
曲線漂浮繞大灣,比例度盤往小扳;
曲線偏離回復(fù)慢,積分時(shí)間往下降;
曲線波動(dòng)周期長(zhǎng),積分時(shí)間再加長(zhǎng):
第一步:整定比例控制
將比例控制作用由小變到大,觀察各次響應(yīng),直至得到反應(yīng)快、超調(diào)小的響應(yīng)曲線。
第二步:整定積分環(huán)節(jié)
若在比例控制下穩(wěn)態(tài)誤差不能滿足要求,需加入積分控制。先將上面步驟中選擇的比例系數(shù)減小為原來(lái)的50~80%,再將積分時(shí)間置一個(gè)較大值,觀測(cè)響應(yīng)曲線。然后減小積分時(shí)間,加大積分作用,并相應(yīng)調(diào)整比例系數(shù),反復(fù)試湊至得到較滿意的響應(yīng),確定比例和積分的參數(shù)。
第三步:整定微分環(huán)節(jié)
若經(jīng)過以上步驟,PI控制只能消除穩(wěn)態(tài)誤差,而動(dòng)態(tài)過程不能令人滿意,則應(yīng)加入微分控制,構(gòu)成PID控制。先置微分時(shí)間TD=0,逐漸加大TD,同時(shí)相應(yīng)地改變比例系數(shù)和積分時(shí)間,反復(fù)試湊至獲得滿意的控制效果和PID控制參數(shù)。
PID的15個(gè)基本概念
沒有金剛鉆,不攬瓷器活。為了能夠掌握并運(yùn)用PID,我們非常有必要學(xué)習(xí)下基本概念來(lái)武裝自己,部分概念會(huì)配上實(shí)際工程中常用的表示方法,以“實(shí):”開頭。
1、被調(diào)量反映被調(diào)對(duì)象的實(shí)際波動(dòng)的量值。被調(diào)量是經(jīng)常變化的。
實(shí):常用檢測(cè)到的反饋值表示,如yout(t)。
2、設(shè)定值PID調(diào)節(jié)器設(shè)定值就是人們期待被調(diào)量需要達(dá)到的值。設(shè)定值可以是固定的,也可以是變化的。
實(shí):人為設(shè)定,多用rin(t)表示。
3、控制輸出PID調(diào)節(jié)器根據(jù)被調(diào)量的變化情況運(yùn)算之后發(fā)出的讓外部執(zhí)行結(jié)構(gòu)按照它的要求動(dòng)作的指令,即整個(gè)調(diào)節(jié)器的輸出。請(qǐng)注意與被調(diào)量yout(t)的區(qū)別,這兩個(gè)是完全不同的概念,經(jīng)常有人在混淆這兩個(gè)概念。
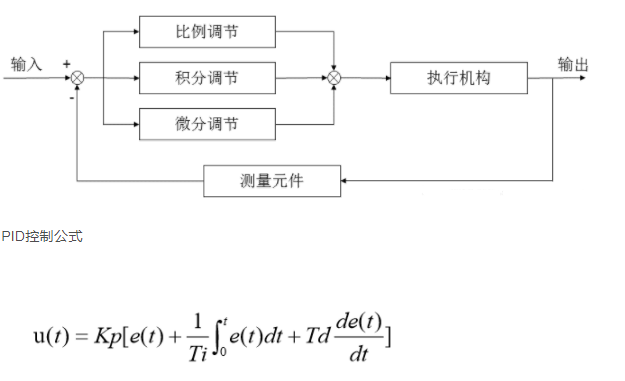
實(shí):你經(jīng)常看到的公式“u(t)=kp[e(t)+1/TI∫e(t)dt+TD*de(t)/dt]”中的u(t)。
4、輸入偏差輸入偏差時(shí)被調(diào)量和設(shè)定值之間的差值。
實(shí):error(t)=rin(t)-yout(t)。
5、P(比例)P就是比例作用,簡(jiǎn)單說就是輸入偏差乘以一個(gè)系數(shù)。
實(shí):如kp,KP都是一樣的。
6、I(積分)I就是積分,簡(jiǎn)單說就是將輸入偏差進(jìn)行積分運(yùn)算。
7、D(積分)D就是微分,簡(jiǎn)單說就是將輸入偏差進(jìn)行微分運(yùn)算。
8、PID基本公式PID調(diào)節(jié)器參數(shù)整定過程通俗講就是先把系統(tǒng)調(diào)為純比例作用,逐步增強(qiáng)比例作用讓系統(tǒng)產(chǎn)生等幅振蕩,記錄下比例作用和振蕩周期,然后這個(gè)比例作用乘以0.6,積分作用適當(dāng)延長(zhǎng)
KP=?0.6*Km KD=?KP*π/4ω?或?KD=?KP*tu/8 KI=?KP*ω/π?或?KI=?2KP/tu KP:比例控制參數(shù); KD:積分控制參數(shù); KI:微分控制參數(shù);
Km:系統(tǒng)開始振蕩時(shí)的比例值,通常稱為臨界比例值;
ω:等幅振蕩時(shí)的頻率,tu為振蕩周期。這里 tuω =2π,而不是tuω=1,學(xué)過傅里葉和拉氏變換的同學(xué)應(yīng)該明白這是為什么,這里不做深入探討。
9、單回路單回路就是只有一個(gè)PID的調(diào)節(jié)系統(tǒng)。
10、串級(jí)一個(gè)PID不夠用,串級(jí)就是把兩個(gè)PID串接起來(lái)形成一個(gè)串級(jí)調(diào)節(jié)系統(tǒng),也被成為雙回路調(diào)節(jié)系統(tǒng)。串級(jí)調(diào)節(jié)系統(tǒng)里PID調(diào)節(jié)器有主調(diào)和副調(diào)之分。
在串級(jí)調(diào)節(jié)系統(tǒng)中要調(diào)節(jié)被調(diào)量的PID叫做主調(diào),輸出直接去指揮執(zhí)行器動(dòng)作的PID叫做副調(diào),主調(diào)的控制輸出進(jìn)入副調(diào)作為副調(diào)的設(shè)定值。主調(diào)選用單回路PID調(diào)節(jié)器,副調(diào)選用外給定調(diào)節(jié)器。
11、正作用
對(duì)于PID調(diào)節(jié)器而言,控制輸出隨被調(diào)量增高而增高,隨被調(diào)量減少而減少的作用,叫做PID正作用。
12、負(fù)作用
對(duì)于PID調(diào)節(jié)器而言,控制輸出隨被調(diào)量增高而降低,隨被調(diào)量減少而增高的作用,叫做PID負(fù)作用。
13、動(dòng)態(tài)偏差
在調(diào)節(jié)過程中,被調(diào)量和設(shè)定值之間的偏差隨時(shí)改變,任意時(shí)刻兩者之間的偏差叫做動(dòng)態(tài)偏差。
14、靜態(tài)偏差
調(diào)節(jié)趨于穩(wěn)定之后,被調(diào)量和設(shè)定值之間還存在的偏差交靜態(tài)偏差。消除靜態(tài)偏差是通過PID調(diào)節(jié)器積分作用來(lái)實(shí)現(xiàn)的。
15、回調(diào)
調(diào)節(jié)器調(diào)節(jié)作用顯示,使被調(diào)量開始由上升變?yōu)橄陆担蛘哂上陆底優(yōu)樯仙厔?shì)成為回調(diào)。
三個(gè)控制環(huán)節(jié)的作用
我們先只說PID控制器的三個(gè)最基本的參數(shù):kP,kI,kD。
kP的作用:
P就是比例的意思。它的作用最明顯,原理也最簡(jiǎn)單。我們先說這個(gè):
需要控制的量,比如水溫,有它現(xiàn)在的『當(dāng)前值』,也有我們期望的『目標(biāo)值』。
當(dāng)兩者差距不大時(shí),就讓加熱器“輕輕地”加熱一下。
要是因?yàn)槟承┰颍瑴囟冉档土撕芏啵妥尲訜崞?strong>“稍稍用力”加熱一下。
要是當(dāng)前溫度比目標(biāo)溫度低得多,就讓加熱器“開足馬力”加熱,盡快讓水溫到達(dá)目標(biāo)附近。
這就是P的作用,跟開關(guān)控制方法相比,是不是“溫文爾雅”了很多
實(shí)際寫程序時(shí),就讓偏差(目標(biāo)減去當(dāng)前)與調(diào)節(jié)裝置的“調(diào)節(jié)力度”,建立一個(gè)一次函數(shù)的關(guān)系,就可以實(shí)現(xiàn)最基本的“比例”控制了~
kP越大,調(diào)節(jié)作用越激進(jìn),kP調(diào)小會(huì)讓調(diào)節(jié)作用更保守。
要是你正在制作一個(gè)平衡車,有了P的作用,你會(huì)發(fā)現(xiàn),平衡車在平衡角度附近來(lái)回“狂抖”,比較難穩(wěn)住。
如果已經(jīng)到了這一步——恭喜你!離成功只差一小步了~
kD的作用:
D的作用更好理解一些,所以先說說D,最后說I。
剛才我們有了P的作用。你不難發(fā)現(xiàn),只有P好像不能讓平衡車站起來(lái),水溫也控制得晃晃悠悠,好像整個(gè)系統(tǒng)不是特別穩(wěn)定,總是在“抖動(dòng)”。
你心里設(shè)想一個(gè)彈簧:現(xiàn)在在平衡位置上。拉它一下,然后松手。這時(shí)它會(huì)震蕩起來(lái)。因?yàn)樽枇苄。赡軙?huì)震蕩很長(zhǎng)時(shí)間,才會(huì)重新停在平衡位置。
請(qǐng)想象一下:要是把上圖所示的系統(tǒng)浸沒在水里,同樣拉它一下 :這種情況下,重新停在平衡位置的時(shí)間就短得多。
我們需要一個(gè)控制作用,讓被控制的物理量的“變化速度”趨于0,即類似于“阻尼”的作用。
因?yàn)椋?dāng)比較接近目標(biāo)時(shí),P的控制作用就比較小了。越接近目標(biāo),P的作用越溫柔。有很多內(nèi)在的或者外部的因素,使控制量發(fā)生小范圍的擺動(dòng)。
D的作用就是讓物理量的速度趨于0,只要什么時(shí)候,這個(gè)量具有了速度,D就向相反的方向用力,盡力剎住這個(gè)變化。
kD參數(shù)越大,向速度相反方向剎車的力道就越強(qiáng)。
如果是平衡小車,加上P和D兩種控制作用,如果參數(shù)調(diào)節(jié)合適,它應(yīng)該可以站起來(lái)了~歡呼吧。
等等,PID三兄弟好像還有一位。看起來(lái)PD就可以讓物理量保持穩(wěn)定,那還要I干嘛?
因?yàn)槲覀兒鲆暳艘环N重要的情況:
kI的作用:
還是以熱水為例。假如有個(gè)人把我們的加熱裝置帶到了非常冷的地方,開始燒水了。需要燒到50℃。
在P的作用下,水溫慢慢升高。直到升高到45℃時(shí),他發(fā)現(xiàn)了一個(gè)不好的事情:天氣太冷,水散熱的速度,和P控制的加熱的速度相等了。
這可怎么辦?
P兄這樣想:我和目標(biāo)已經(jīng)很近了,只需要輕輕加熱就可以了。
D兄這樣想:加熱和散熱相等,溫度沒有波動(dòng),我好像不用調(diào)整什么。
于是,水溫永遠(yuǎn)地停留在45℃,永遠(yuǎn)到不了50℃。
作為一個(gè)人,根據(jù)常識(shí),我們知道,應(yīng)該進(jìn)一步增加加熱的功率。可是增加多少該如何計(jì)算呢?
前輩科學(xué)家們想到的方法是真的巧妙。
設(shè)置一個(gè)積分量。只要偏差存在,就不斷地對(duì)偏差進(jìn)行積分(累加),并反應(yīng)在調(diào)節(jié)力度上。
這樣一來(lái),即使45℃和50℃相差不太大,但是隨著時(shí)間的推移,只要沒達(dá)到目標(biāo)溫度,這個(gè)積分量就不斷增加。系統(tǒng)就會(huì)慢慢意識(shí)到:還沒有到達(dá)目標(biāo)溫度,該增加功率啦!
到了目標(biāo)溫度后,假設(shè)溫度沒有波動(dòng),積分值就不會(huì)再變動(dòng)。這時(shí),加熱功率仍然等于散熱功率。但是,溫度是穩(wěn)穩(wěn)的50℃。
kI的值越大,積分時(shí)乘的系數(shù)就越大,積分效果越明顯。
所以,I的作用就是,減小靜態(tài)情況下的誤差,讓受控物理量盡可能接近目標(biāo)值。
I在使用時(shí)還有個(gè)問題:需要設(shè)定積分限制。防止在剛開始加熱時(shí),就把積分量積得太大,難以控制。
PID控制原理:
1、比例(P)控制比例控制是一種最簡(jiǎn)單的控制方式。其控制器的輸出與輸入誤差信號(hào)成比例關(guān)系。當(dāng)僅有比例控制時(shí)系統(tǒng)輸出存在穩(wěn)態(tài)誤差。
2、積分(I)控制在積分控制中,控制器的輸出與輸入誤差信號(hào)的積分成正比關(guān)系。對(duì)一個(gè)自動(dòng)控制系統(tǒng),如果在進(jìn)入穩(wěn)態(tài)后存在穩(wěn)態(tài)誤差,則稱這個(gè)控制系統(tǒng)是有穩(wěn)態(tài)誤差的或簡(jiǎn)稱有差系統(tǒng)。為了消除穩(wěn)態(tài)誤差,在控制器中必須引入“積分項(xiàng)”。積分項(xiàng)對(duì)誤差取決于時(shí)間的積分,隨著時(shí)間的增加,積分項(xiàng)會(huì)增大。這樣,即便誤差很小,積分項(xiàng)也會(huì)隨著時(shí)間的增加而加大,它推動(dòng)控制器的輸出增大使穩(wěn)態(tài)誤差進(jìn)一步減小,直到等于零。因此,比例+積分(PI)控制器,可以使系統(tǒng)在進(jìn)入穩(wěn)態(tài)后無(wú)穩(wěn)態(tài)誤差。
3、微分(D)控制在微分控制中,控制器的輸出與輸入誤差信號(hào)的微分(即誤差的變化率)成正比關(guān)系。自動(dòng)控制系統(tǒng)在克服誤差的調(diào)節(jié)過程中可能會(huì)出現(xiàn)振蕩甚至失穩(wěn)。
其原因是由于存在有較大慣性組件(環(huán)節(jié))或有滯后組件,具有抑制誤差的作用,其變化總是落后于誤差的變化。
解決的辦法是使抑制誤差的作用的變化“超前”,即在誤差接近零時(shí),抑制誤差的作用就應(yīng)該是零。這就是說,在控制器中僅引入“比例”項(xiàng)往往是不夠的,比例項(xiàng)的作用僅是放大誤差的幅值,而目前需要增加的是“微分項(xiàng)”,它能預(yù)測(cè)誤差變化的趨勢(shì)。
這樣,具有比例+微分的控制器,就能夠提前使抑制誤差的控制作用等于零,甚至為負(fù)值,從而避免了被控量的嚴(yán)重超調(diào)。所以對(duì)有較大慣性或滯后的被控對(duì)象,比例+微分(PD)控制器能改善系統(tǒng)在調(diào)節(jié)過程中的動(dòng)態(tài)特性。
PID控制器參數(shù)整定的一般方法:
PID控制器的參數(shù)整定是控制系統(tǒng)設(shè)計(jì)的核心內(nèi)容。它是根據(jù)被控過程的特性確定PID控制器的比例系數(shù)、積分時(shí)間和微分時(shí)間的大小。PID控制器參數(shù)整定的方法很多,概括起來(lái)有兩大類:
理論計(jì)算整定法
它主要是依據(jù)系統(tǒng)的數(shù)學(xué)模型,經(jīng)過理論計(jì)算確定控制器參數(shù)。這種方法所得到的計(jì)算數(shù)據(jù)未必可以直接用,還必須通過工程實(shí)際進(jìn)行調(diào)整和修改;
工程整定方法
它主要依賴工程經(jīng)驗(yàn),直接在控制系統(tǒng)的試驗(yàn)中進(jìn)行,且方法簡(jiǎn)單、易于掌握,在工程實(shí)際中被廣泛采用。PID控制器參數(shù)的工程整定方法,主要有臨界比例法、反應(yīng)曲線法和衰減法。
三種方法各有其特點(diǎn),其共同點(diǎn)都是通過試驗(yàn),然后按照工程經(jīng)驗(yàn)公式對(duì)控制器參數(shù)進(jìn)行整定。但無(wú)論采用哪一種方法所得到的控制器參數(shù),都需要在實(shí)際運(yùn)行中進(jìn)行最后調(diào)整與完善。
現(xiàn)在一般采用的是臨界比例法。利用該方法進(jìn)行 PID控制器參數(shù)的整定步驟如下:* 首先預(yù)選擇一個(gè)足夠短的采樣周期讓系統(tǒng)工作;
僅加入比例控制環(huán)節(jié),直到系統(tǒng)對(duì)輸入的階躍響應(yīng)出現(xiàn)臨界振蕩,記下這時(shí)的比例放大系數(shù)和臨界振蕩周期;
在一定的控制度下通過公式計(jì)算得到PID控制器的參數(shù)。
PID參數(shù)的設(shè)定:是靠經(jīng)驗(yàn)及工藝的熟悉,參考測(cè)量值跟蹤與設(shè)定值曲線,從而調(diào)整P、I、D的大小。
書上的常用口訣:
參數(shù)整定找最佳,從小到大順序查;?? ?? 先是比例后積分,最后再把微分加;?? ?? 曲線振蕩很頻繁,比例度盤要放大;?? ?? 曲線漂浮繞大灣,比例度盤往小扳;?? ?? 曲線偏離回復(fù)慢,積分時(shí)間往下降;?? ?? 曲線波動(dòng)周期長(zhǎng),積分時(shí)間再加長(zhǎng);?? ?? 曲線振蕩頻率快,先把微分降下來(lái);?? ?? 動(dòng)差大來(lái)波動(dòng)慢。微分時(shí)間應(yīng)加長(zhǎng);?? ?? 理想曲線兩個(gè)波,前高后低4比1;?
一看二調(diào)多分析,調(diào)節(jié)質(zhì)量不會(huì)低。
個(gè)人認(rèn)為PID參數(shù)的設(shè)置的大小,一方面是要根據(jù)控制對(duì)象的具體情況而定;另一方面是經(jīng)驗(yàn)。P是解決幅值震蕩,P大了會(huì)出現(xiàn)幅值震蕩的幅度大,但震蕩頻率小,系統(tǒng)達(dá)到穩(wěn)定時(shí)間長(zhǎng);I是解決動(dòng)作響應(yīng)的速度快慢的,I大了響應(yīng)速度慢,反之則快;D是消除靜態(tài)誤差的,一般D設(shè)置都比較小,而且對(duì)系統(tǒng)影響比較小。
PID參數(shù)怎樣調(diào)整最佳:
(1)整定比例控制 將比例控制作用由小變到大,觀察各次響應(yīng),直至得到反應(yīng)快、超調(diào)小的響應(yīng)曲線。
(2)整定積分環(huán)節(jié) 若在比例控制下穩(wěn)態(tài)誤差不能滿足要求,需加入積分控制。
先將步驟(1)中選擇的比例系數(shù)減小為原來(lái)的50~80%,再將積分時(shí)間置一個(gè)較大值,觀測(cè)響應(yīng)曲線。然后減小積分時(shí)間,加大積分作用,并相應(yīng)調(diào)整比例系數(shù),反復(fù)試湊至得到較滿意的響應(yīng),確定比例和積分的參數(shù)。
(3)整定微分環(huán)節(jié) 若經(jīng)過步驟(2),PI控制只能消除穩(wěn)態(tài)誤差,而動(dòng)態(tài)過程不能令人滿意,則應(yīng)加入微分控制,構(gòu)成PID控制。先置微分時(shí)間TD=0,逐漸加大TD,同時(shí)相應(yīng)地改變比例系數(shù)和積分時(shí)間,反復(fù)試湊至獲得滿意的控制效果和PID控制參數(shù)。
動(dòng)圖演示
先看動(dòng)圖學(xué)習(xí)一下PID:
系統(tǒng)初始狀態(tài)為0,目標(biāo)狀態(tài)為10。
先來(lái)展示一下遍歷參數(shù)的過程。
下面的動(dòng)圖都是展示的各個(gè)參數(shù)各自的影響:
?
?
?
?
?
?
在實(shí)際工程中,應(yīng)用最為廣泛的調(diào)節(jié)器控制規(guī)律為比例、積分、微分控制,簡(jiǎn)稱PID控制,又稱PID調(diào)節(jié)。PID控制器問世至今以其結(jié)構(gòu)簡(jiǎn)單、穩(wěn)定性好、工作可靠、調(diào)整方便而成為工業(yè)控制的主要技術(shù)之一。
PID調(diào)節(jié)控制是一個(gè)傳統(tǒng)控制方法,它適用于溫度、壓力、流量、液位等幾乎所有現(xiàn)場(chǎng),不同的現(xiàn)場(chǎng),僅僅是PID參數(shù)應(yīng)設(shè)置不同,只要參數(shù)設(shè)置得當(dāng)均可以達(dá)到很好的效果。均可以達(dá)到0.1%,甚至更高的控制要求。
PID的故事
小明接到這樣一個(gè)任務(wù):有一個(gè)水缸點(diǎn)漏水(而且漏水的速度還不一定固定不變),要求水面高度維持在某個(gè)位置,一旦發(fā)現(xiàn)水面高度低于要求位置,就要往水缸里加水。
小明接到任務(wù)后就一直守在水缸旁邊,時(shí)間長(zhǎng)就覺得無(wú)聊,就跑到房里看小說了,每30分鐘來(lái)檢查一次水面高度。
水漏得太快,每次小明來(lái)檢查時(shí),水都快漏完了,離要求的高度相差很遠(yuǎn),小明改為每3分鐘來(lái)檢查一次,結(jié)果每次來(lái)水都沒怎么漏,不需要加水,來(lái)得太頻繁做的是無(wú)用功。
幾次試驗(yàn)后,確定每10分鐘來(lái)檢查一次。這個(gè)檢查時(shí)間就稱為采樣周期。
開始小明用瓢加水,水龍頭離水缸有十幾米的距離,經(jīng)常要跑好幾趟才加夠水,于是小明又改為用桶加,一加就是一桶,跑的次數(shù)少了,加水的速度也快了,但好幾次將缸給加溢出了,不小心弄濕了幾次鞋,小明又動(dòng)腦筋,我不用瓢也不用桶,老子用盆,幾次下來(lái),發(fā)現(xiàn)剛剛好,不用跑太多次,也不會(huì)讓水溢出。這個(gè)加水工具的大小就稱為比例系數(shù)。
小明又發(fā)現(xiàn)水雖然不會(huì)加過量溢出了,有時(shí)會(huì)高過要求位置比較多,還是有打濕鞋的危險(xiǎn)。
他又想了個(gè)辦法,在水缸上裝一個(gè)漏斗,每次加水不直接倒進(jìn)水缸,而是倒進(jìn)漏斗讓它慢慢加。這樣溢出的問題解決了,但加水的速度又慢了,有時(shí)還趕不上漏水的速度。
于是他試著變換不同大小口徑的漏斗來(lái)控制加水的速度,最后終于找到了滿意的漏斗。漏斗的時(shí)間就稱為積分時(shí)間。
小明終于喘了一口,但任務(wù)的要求突然嚴(yán)了,水位控制的及時(shí)性要求大大提高,一旦水位過低,必須立即將水加到要求位置,而且不能高出太多,否則不給工錢。小明又為難了!
于是他又開動(dòng)腦筋,終于讓它想到一個(gè)辦法,常放一盆備用水在旁邊,一發(fā)現(xiàn)水位低了,不經(jīng)過漏斗就是一盆水下去,這樣及時(shí)性是保證了,但水位有時(shí)會(huì)高多了。
他又在要求水面位置上面一點(diǎn)將水鑿一孔,再接一根管子到下面的備用桶里這樣多出的水會(huì)從上面的孔里漏出來(lái)。這個(gè)水漏出的快慢就稱為微分時(shí)間。
看到幾個(gè)問采樣周期的帖子,臨時(shí)想了這么個(gè)故事。微分的比喻一點(diǎn)牽強(qiáng),不過能幫助理解就行了,呵呵,入門級(jí)的,如能幫助新手理解下PID,于愿足矣。
故事中小明的試驗(yàn)是一步步獨(dú)立做,但實(shí)際加水工具、漏斗口徑、溢水孔的大小同時(shí)都會(huì)影響加水的速度,水位超調(diào)量的大小,做了后面的實(shí)驗(yàn)后,往往還要修改改前面實(shí)驗(yàn)的結(jié)果。
故事中小明的試驗(yàn)是一步步獨(dú)立做,但實(shí)際加水工具、漏斗口徑、溢水孔的大小同時(shí)都會(huì)影響加水的速度,水位超調(diào)量的大小,做了后面的實(shí)驗(yàn)后,往往還要修改改前面實(shí)驗(yàn)的結(jié)果。
人以PID控制的方式用水壺往水杯里倒印有刻度的半杯水后停下;
設(shè)定值:水杯的半杯刻度;
實(shí)際值:水杯的實(shí)際水量;
輸出值:水壺倒出水量和水杯舀出水量;
測(cè)量:人的眼睛(相當(dāng)于傳感器)
執(zhí)行對(duì)象:人
正執(zhí)行:倒水
反執(zhí)行:舀水
(1)P比例控制
就是人看到水杯里水量沒有達(dá)到水杯的半杯刻度,就按照一定水量從水壺里往水杯里倒水或者水杯的水量多過刻度,就以一定水量從水杯里舀水出來(lái),這個(gè)一個(gè)動(dòng)作可能會(huì)造成不到半杯或者多了半杯就停下來(lái)。
說明:P比例控制是一種最簡(jiǎn)單的控制方式。其控制器的輸出與輸入誤差信號(hào)成比例關(guān)系。當(dāng)僅有比例控制時(shí)系統(tǒng)輸出存在穩(wěn)態(tài)誤差(Steady-state error)。
(2)PI積分控制
就是按照一定水量往水杯里倒,如果發(fā)現(xiàn)杯里的水量沒有刻度就一直倒,后來(lái)發(fā)現(xiàn)水量超過了半杯,就從杯里往外面舀水,然后反復(fù)不夠就倒水,多了就舀水,直到水量達(dá)到刻度。
說明:在積分I控制中,控制器的輸出與輸入誤差信號(hào)的積分成正比關(guān)系。對(duì)一個(gè)自動(dòng)控制系統(tǒng),如果在進(jìn)入穩(wěn)態(tài)后存在穩(wěn)態(tài)誤差,則稱這個(gè)控制系統(tǒng)是有穩(wěn)態(tài)誤差的或簡(jiǎn)稱有差系統(tǒng)(System with Steady-state Error)。
為了消除穩(wěn)態(tài)誤差,在控制器中必須引入“積分項(xiàng)”。積分項(xiàng)對(duì)誤差取決于時(shí)間的積分,隨著時(shí)間的增加,積分項(xiàng)會(huì)增大。這樣,即便誤差很小,積分項(xiàng)也會(huì)隨著時(shí)間的增加而加大,它推動(dòng)控制器的輸出增大使穩(wěn)態(tài)誤差進(jìn)一步減小,直到等于零。
因此,比例+積分(PI)控制器,可以使系統(tǒng)在進(jìn)入穩(wěn)態(tài)后無(wú)穩(wěn)態(tài)誤差。
(3)PID微分控制
就是人的眼睛看著杯里水量和刻度的距離,當(dāng)差距很大的時(shí)候,就用水壺大水量得倒水,當(dāng)人看到水量快要接近刻度的時(shí)候,就減少水壺的得出水量,慢慢的逼近刻度,直到停留在杯中的刻度。
如果最后能精確停在刻度的位置,就是無(wú)靜差控制;如果停在刻度附近,就是有靜差控制。
說明:在微分控制D中,控制器的輸出與輸入誤差信號(hào)的微分(即誤差的變化率)成正比關(guān)系。
在工程實(shí)際中,應(yīng)用最為廣泛的調(diào)節(jié)器控制規(guī)律為比例、積分、微分控制,簡(jiǎn)稱PID控制,又稱PID調(diào)節(jié)。
PID控制器問世至今已有近70年歷史,它以其結(jié)構(gòu)簡(jiǎn)單、穩(wěn)定性好、工作可靠、調(diào)整方便而成為工業(yè)控制的主要技術(shù)之一。
當(dāng)被控對(duì)象的結(jié)構(gòu)和參數(shù)不能完全掌握,或得不到精確的數(shù)學(xué)模型時(shí),控制理論的其它技術(shù)難以采用時(shí),系統(tǒng)控制器的結(jié)構(gòu)和參數(shù)必須依靠經(jīng)驗(yàn)和現(xiàn)場(chǎng)調(diào)試來(lái)確定,這時(shí)應(yīng)用PID控制技術(shù)最為方便。
即當(dāng)我們不完全了解一個(gè)系統(tǒng)和被控對(duì)象﹐或不能通過有效的測(cè)量手段來(lái)獲得系統(tǒng)參數(shù)時(shí),最適合用PID控制技術(shù)。PID控制,實(shí)際中也有PI和PD控制。
PID控制器就是根據(jù)系統(tǒng)的誤差,利用比例、積分、微分計(jì)算出控制量進(jìn)行控制的。
PID參數(shù)
一、比例(P)控制
比例控制是一種最簡(jiǎn)單的控制方式。其控制器的輸出與輸入誤差信號(hào)成比例關(guān)系。當(dāng)僅有比例控制時(shí)系統(tǒng)輸出存在穩(wěn)態(tài)誤差(Steady-state error)。
二、積分(I)控制
在積分控制中,控制器的輸出與輸入誤差信號(hào)的積分成正比關(guān)系。對(duì)一個(gè)自動(dòng)控制系統(tǒng),如果在進(jìn)入穩(wěn)態(tài)后存在穩(wěn)態(tài)誤差,則稱這個(gè)控制系統(tǒng)是有穩(wěn)態(tài)誤差的或簡(jiǎn)稱有差系統(tǒng)(System with Steady-state Error)。為了消除穩(wěn)態(tài)誤差,在控制器中必須引入“積分項(xiàng)”。積分項(xiàng)對(duì)誤差取決于時(shí)間的積分,隨著時(shí)間的增加,積分項(xiàng)會(huì)增大。這樣,即便誤差很小,積分項(xiàng)也會(huì)隨著時(shí)間的增加而加大,它推動(dòng)控制器的輸出增大使穩(wěn)態(tài)誤差進(jìn)一步減小,直到等于零。因此,比例+積分(PI)控制器,可以使系統(tǒng)在進(jìn)入穩(wěn)態(tài)后無(wú)穩(wěn)態(tài)誤差。
三、微分(D)控制
在微分控制中,控制器的輸出與輸入誤差信號(hào)的微分(即誤差的變化率)成正比關(guān)系。自動(dòng)控制系統(tǒng)在克服誤差的調(diào)節(jié)過程中可能會(huì)出現(xiàn)振蕩甚至失穩(wěn)。
其原因是由于存在有較大慣性組件(環(huán)節(jié))或有滯后(delay)組件,具有抑制誤差的作用,其變化總是落后于誤差的變化。解決的辦法是使抑制誤差的作用的變化“超前”,即在誤差接近零時(shí),抑制誤差的作用就應(yīng)該是零。
這就是說,在控制器中僅引入“比例”項(xiàng)往往是不夠的,比例項(xiàng)的作用僅是放大誤差的幅值,而目前需要增加的是“微分項(xiàng)”,它能預(yù)測(cè)誤差變化的趨勢(shì),這樣,具有比例+微分的控制器,就能夠提前使抑制誤差的控制作用等于零,甚至為負(fù)值,從而避免了被控量的嚴(yán)重超調(diào)。所以對(duì)有較大慣性或滯后的被控對(duì)象,比例+微分(PD)控制器能改善系統(tǒng)在調(diào)節(jié)過程中的動(dòng)態(tài)特性。
在PID參數(shù)進(jìn)行整定時(shí)如果能夠有理論的方法確定PID參數(shù)當(dāng)然是最理想的方法,但是在實(shí)際的應(yīng)用中,更多的是通過湊試法來(lái)確定PID的參數(shù)。
增大比例系數(shù)P一般將加快系統(tǒng)的響應(yīng),在有靜差的情況下有利于減小靜差,但是過大的比例系數(shù)會(huì)使系統(tǒng)有比較大的超調(diào),并產(chǎn)生振蕩,使穩(wěn)定性變壞。
增大積分時(shí)間I有利于減小超調(diào),減小振蕩,使系統(tǒng)的穩(wěn)定性增加,但是系統(tǒng)靜差消除時(shí)間變長(zhǎng)。
增大微分時(shí)間D有利于加快系統(tǒng)的響應(yīng)速度,使系統(tǒng)超調(diào)量減小,穩(wěn)定性增加,但系統(tǒng)對(duì)擾動(dòng)的抑制能力減弱。
在湊試時(shí),可參考以上參數(shù)對(duì)系統(tǒng)控制過程的影響趨勢(shì),對(duì)參數(shù)調(diào)整實(shí)行先比例、后積分,再微分的整定步驟。
PID控制器參數(shù)整定的方法
PID控制器的參數(shù)整定是控制系統(tǒng)設(shè)計(jì)的核心內(nèi)容。它是根據(jù)被控過程的特性確定PID控制器的比例系數(shù)、積分時(shí)間和微分時(shí)間的大小。PID控制器參數(shù)整定的方法很多,概括起來(lái)有兩大類:
一、理論計(jì)算整定法
它主要是依據(jù)系統(tǒng)的數(shù)學(xué)模型,經(jīng)過理論計(jì)算確定控制器參數(shù)。這種方法所得到的計(jì)算數(shù)據(jù)未必可以直接用,還必須通過工程實(shí)際進(jìn)行調(diào)整和修改;
二、工程整定方法
它主要依賴工程經(jīng)驗(yàn),直接在控制系統(tǒng)的試驗(yàn)中進(jìn)行,且方法簡(jiǎn)單、易于掌握,在工程實(shí)際中被廣泛采用。PID控制器參數(shù)的工程整定方法,主要有臨界比例法、反應(yīng)曲線法和衰減法。三種方法各有其特點(diǎn),其共同點(diǎn)都是通過試驗(yàn),然后按照工程經(jīng)驗(yàn)公式對(duì)控制器參數(shù)進(jìn)行整定。但無(wú)論采用哪一種方法所得到的控制器參數(shù),都需要在實(shí)際運(yùn)行中進(jìn)行最后調(diào)整與完善。
現(xiàn)在一般采用的是臨界比例法,利用該方法進(jìn)行 PID控制器參數(shù)的整定步驟如下:
首先預(yù)選擇一個(gè)足夠短的采樣周期讓系統(tǒng)工作;
僅加入比例控制環(huán)節(jié),直到系統(tǒng)對(duì)輸入的階躍響應(yīng)出現(xiàn)臨界振蕩,記下這時(shí)的比例放大系數(shù)和臨界振蕩周期;
在一定的控制度下通過公式計(jì)算得到PID控制器的參數(shù)。
PID參數(shù)的設(shè)定:是靠經(jīng)驗(yàn)及工藝的熟悉,參考測(cè)量值跟蹤與設(shè)定值曲線,從而調(diào)整P、I、D的大小。
常用口訣:
參數(shù)整定找最佳,從小到大順序查;
先是比例后積分,最后再把微分加;
曲線振蕩很頻繁,比例度盤要放大;
曲線漂浮繞大灣,比例度盤往小扳;
曲線偏離回復(fù)慢,積分時(shí)間往下降;
曲線波動(dòng)周期長(zhǎng),積分時(shí)間再加長(zhǎng):
第一步:整定比例控制
將比例控制作用由小變到大,觀察各次響應(yīng),直至得到反應(yīng)快、超調(diào)小的響應(yīng)曲線。
第二步:整定積分環(huán)節(jié)
若在比例控制下穩(wěn)態(tài)誤差不能滿足要求,需加入積分控制。先將上面步驟中選擇的比例系數(shù)減小為原來(lái)的50~80%,再將積分時(shí)間置一個(gè)較大值,觀測(cè)響應(yīng)曲線。然后減小積分時(shí)間,加大積分作用,并相應(yīng)調(diào)整比例系數(shù),反復(fù)試湊至得到較滿意的響應(yīng),確定比例和積分的參數(shù)。
第三步:整定微分環(huán)節(jié)
若經(jīng)過以上步驟,PI控制只能消除穩(wěn)態(tài)誤差,而動(dòng)態(tài)過程不能令人滿意,則應(yīng)加入微分控制,構(gòu)成PID控制。先置微分時(shí)間TD=0,逐漸加大TD,同時(shí)相應(yīng)地改變比例系數(shù)和積分時(shí)間,反復(fù)試湊至獲得滿意的控制效果和PID控制參數(shù)。
PID的15個(gè)基本概念
沒有金剛鉆,不攬瓷器活。為了能夠掌握并運(yùn)用PID,我們非常有必要學(xué)習(xí)下基本概念來(lái)武裝自己,部分概念會(huì)配上實(shí)際工程中常用的表示方法,以“實(shí):”開頭。
1、被調(diào)量反映被調(diào)對(duì)象的實(shí)際波動(dòng)的量值。被調(diào)量是經(jīng)常變化的。
實(shí):常用檢測(cè)到的反饋值表示,如yout(t)。
2、設(shè)定值PID調(diào)節(jié)器設(shè)定值就是人們期待被調(diào)量需要達(dá)到的值。設(shè)定值可以是固定的,也可以是變化的。
實(shí):人為設(shè)定,多用rin(t)表示。
3、控制輸出PID調(diào)節(jié)器根據(jù)被調(diào)量的變化情況運(yùn)算之后發(fā)出的讓外部執(zhí)行結(jié)構(gòu)按照它的要求動(dòng)作的指令,即整個(gè)調(diào)節(jié)器的輸出。請(qǐng)注意與被調(diào)量yout(t)的區(qū)別,這兩個(gè)是完全不同的概念,經(jīng)常有人在混淆這兩個(gè)概念。
實(shí):你經(jīng)常看到的公式“u(t)=kp[e(t)+1/TI∫e(t)dt+TD*de(t)/dt]”中的u(t)。
4、輸入偏差輸入偏差時(shí)被調(diào)量和設(shè)定值之間的差值。
實(shí):error(t)=rin(t)-yout(t)。
5、P(比例)P就是比例作用,簡(jiǎn)單說就是輸入偏差乘以一個(gè)系數(shù)。
實(shí):如kp,KP都是一樣的。
6、I(積分)I就是積分,簡(jiǎn)單說就是將輸入偏差進(jìn)行積分運(yùn)算。
7、D(積分)D就是微分,簡(jiǎn)單說就是將輸入偏差進(jìn)行微分運(yùn)算。
8、PID基本公式PID調(diào)節(jié)器參數(shù)整定過程通俗講就是先把系統(tǒng)調(diào)為純比例作用,逐步增強(qiáng)比例作用讓系統(tǒng)產(chǎn)生等幅振蕩,記錄下比例作用和振蕩周期,然后這個(gè)比例作用乘以0.6,積分作用適當(dāng)延長(zhǎng)
?
?
?
?
KP=?0.6*Km KD=?KP*π/4ω?或?KD=?KP*tu/8 KI=?KP*ω/π?或?KI=?2KP/tu KP:比例控制參數(shù); KD:積分控制參數(shù); KI:微分控制參數(shù);
Km:系統(tǒng)開始振蕩時(shí)的比例值,通常稱為臨界比例值;
ω:等幅振蕩時(shí)的頻率,tu為振蕩周期。這里 tuω =2π,而不是tuω=1,學(xué)過傅里葉和拉氏變換的同學(xué)應(yīng)該明白這是為什么,這里不做深入探討。
9、單回路單回路就是只有一個(gè)PID的調(diào)節(jié)系統(tǒng)。
10、串級(jí)一個(gè)PID不夠用,串級(jí)就是把兩個(gè)PID串接起來(lái)形成一個(gè)串級(jí)調(diào)節(jié)系統(tǒng),也被成為雙回路調(diào)節(jié)系統(tǒng)。串級(jí)調(diào)節(jié)系統(tǒng)里PID調(diào)節(jié)器有主調(diào)和副調(diào)之分。
在串級(jí)調(diào)節(jié)系統(tǒng)中要調(diào)節(jié)被調(diào)量的PID叫做主調(diào),輸出直接去指揮執(zhí)行器動(dòng)作的PID叫做副調(diào),主調(diào)的控制輸出進(jìn)入副調(diào)作為副調(diào)的設(shè)定值。主調(diào)選用單回路PID調(diào)節(jié)器,副調(diào)選用外給定調(diào)節(jié)器。
11、正作用
對(duì)于PID調(diào)節(jié)器而言,控制輸出隨被調(diào)量增高而增高,隨被調(diào)量減少而減少的作用,叫做PID正作用。
12、負(fù)作用
對(duì)于PID調(diào)節(jié)器而言,控制輸出隨被調(diào)量增高而降低,隨被調(diào)量減少而增高的作用,叫做PID負(fù)作用。
13、動(dòng)態(tài)偏差
在調(diào)節(jié)過程中,被調(diào)量和設(shè)定值之間的偏差隨時(shí)改變,任意時(shí)刻兩者之間的偏差叫做動(dòng)態(tài)偏差。
14、靜態(tài)偏差
調(diào)節(jié)趨于穩(wěn)定之后,被調(diào)量和設(shè)定值之間還存在的偏差交靜態(tài)偏差。消除靜態(tài)偏差是通過PID調(diào)節(jié)器積分作用來(lái)實(shí)現(xiàn)的。
15、回調(diào)
調(diào)節(jié)器調(diào)節(jié)作用顯示,使被調(diào)量開始由上升變?yōu)橄陆担蛘哂上陆底優(yōu)樯仙厔?shì)成為回調(diào)。
編輯:黃飛
?
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論