量,從而達到準(zhǔn)確定位的目的;同時您可以通過控制脈沖頻率來控制電機轉(zhuǎn)動的速度和加速度,從而達到調(diào)速的目的。 步進電機分三種: 永磁式 (PM) , 反應(yīng)式 (VR)和 混合式 (HB)。永磁式步進一般為兩相,轉(zhuǎn)矩和體積較小,步進角
2017-12-06 17:19:01 21461
21461 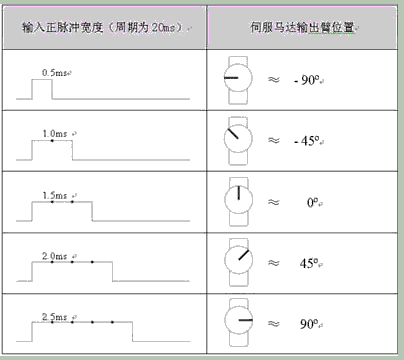
臨界飽和是三極管從放大狀態(tài)過渡到飽和狀態(tài)的臨界點;
深度飽和沒有具體的定義,基極電流要足夠大,網(wǎng)上看到大于2倍臨界飽和Ib。
2022-08-02 18:01:1317192 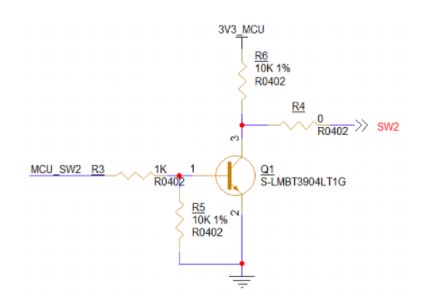
昨天,主要介紹了基本放大電路的飽和工作狀態(tài)。我們看到,飽和狀態(tài)時,BJT的B-E、C-E間近似短路(忽略二極管導(dǎo)通壓降),在后續(xù)的學(xué)習(xí)中,我們會看到這個性質(zhì)用于數(shù)字電路挺好的。
2023-06-01 18:27:19636 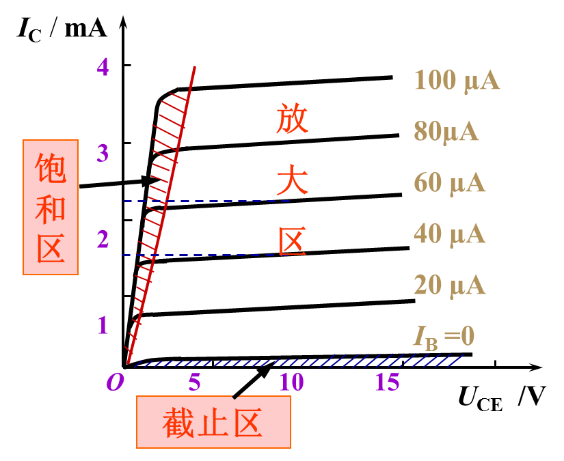
電機按設(shè)定的方向轉(zhuǎn)動一個固定的角度(及步進角)。您可以通過控制脈沖個數(shù)來控制角位移量,從而達到準(zhǔn)確定位的目的;同時您可以通過控制脈沖頻率來控制電機轉(zhuǎn)動的速度和加速度,從而達到調(diào)速的目的。2.步進電機分
2014-01-21 14:55:59
固定的角度一步一步運行的。可以通過控制脈沖個數(shù)來控制角位移量,從而達到準(zhǔn)確定位的目的;同時可以通過控制脈沖頻率來控制電機轉(zhuǎn)動的速度和加速度,從而達到調(diào)速的目的。步進電機可以作為一種控制用的特種電機,利用其沒有...
2021-07-12 08:59:24
收到的脈沖數(shù)調(diào)節(jié)(也就是程序調(diào)節(jié)),這也是為什么3D打印機和激光雕刻機都需要步進電機的原因。但要注意,如果負載過大,或者供電不足,則有可能出現(xiàn)角度不足的情況,我們稱之為”失步“,即沒有達到預(yù)定控制的角度
2016-01-13 17:15:16
步進電機是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機構(gòu)。通俗一點講:當(dāng)步進驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進電機按設(shè)定的方向轉(zhuǎn)動一個固定的角度(即步進角)。您可以通過控制脈沖個數(shù)來控制角位移量,從而達到
2020-08-25 14:38:12
,從而達到精確定位的目的;同時還可以通過控制脈沖頻率來控制電動機轉(zhuǎn)動的速度和加速度,從而達到調(diào)速的目的。一:線、相、極性“相” 就是說明步進電機有幾個線圈(也叫做繞組)。“線” 就是說明步進電...
2021-07-08 10:12:17
、57、86、110等3、步進電動機構(gòu)造:由轉(zhuǎn)子(轉(zhuǎn)子鐵芯、永磁體、轉(zhuǎn)軸、滾珠軸承),定子(繞組、定子鐵芯),前后端蓋等組成。最典型兩相混合式步進電機的定子有8個大齒,40個小齒,轉(zhuǎn)子有50個小齒;三相電機的定子有9個大齒,45個小齒,轉(zhuǎn)子有50個小齒。4、步進電動機主要參數(shù)步進電機的相數(shù):是指電機
2021-06-28 13:06:37
兩相步進電機的驅(qū)動相電流的問題,為什么加速過程測的相電流是正弦波,一旦電機速度起來達到最大速度運行的時候測的電機相電流是變形的電流波形,這是什么原因導(dǎo)致的,有沒有辦法解決。
2020-03-28 20:33:24
我用的是CJ2310 mos管,電源電壓DC24V問題點:如下圖,按照我的理解,線性電阻的電壓不應(yīng)該是24V嗎,實測才11V,GS電壓實測電壓12V已經(jīng)達到開啟電壓了,不知道為什么mos會有11V壓降?
2020-11-20 10:28:03
的動力,在電磁力的作用下,轉(zhuǎn)子會運動到最大磁導(dǎo)率(或者最小磁阻)的位置,并處于平衡狀態(tài)。2、永磁式步進電機。永磁式步進電機轉(zhuǎn)子的材料是永磁性的,轉(zhuǎn)子與定子的極數(shù)相同,電機輸出轉(zhuǎn)矩大,步距角相對較大,但工作
2021-09-10 08:45:23
在這里,我來分享一下我自己對三極管的飽和狀態(tài)的理解。三極管的飽和狀態(tài),就是集電極電位低于基極電位,而稍高與發(fā)射極電位,當(dāng)集電極電位近似等于發(fā)射極電位時,或者夸張一點,集電極電位就等于發(fā)射極電位,我們
2016-10-23 21:29:43
如圖所示,當(dāng)Q3已經(jīng)進入飽和狀態(tài)但是Vce電壓0.63V左右,當(dāng)我把Q3換成PNP管時Vce電壓幾乎為0V,不知道什么原因?希望大家給予關(guān)注并討論,謝謝!
2018-10-22 10:07:39
`各位老師,能不能弱弱的問一下,如何讓三極管進入飽和狀態(tài)?是不是只要減小基極電阻?基極電阻減小,發(fā)射結(jié)電壓就增大,基極電流增大,集電極電流隨之增大,直到集電極電流不能再增大為止,就進入了飽和狀態(tài)
2011-12-16 13:55:26
,BC反偏就是飽和呢,還是當(dāng)晶體管處于飽和狀態(tài)時,其基極電流對晶體管的控制將失去作用呢, 1:當(dāng)我們調(diào)節(jié)可調(diào)電阻,R1,使R1=4.3K時,通過歐姆定律我們可以計算得到, Ib=(5-0.7
2019-04-02 06:00:00
展開討論。 下面我們來討論下究竟什么叫三極管的飽和,到底什么是飽和壓降,BE正偏,BC反偏就是飽和呢,還是當(dāng)晶體管處于飽和狀態(tài)時,其基極電流對晶體管的控制將失去作用呢, 1:當(dāng)我們調(diào)節(jié)可調(diào)電阻,R1
2012-10-20 10:25:52
在細枝末節(jié)上。 三極管一共有三個狀態(tài),分別是截止狀態(tài)、飽和狀態(tài)和放大狀態(tài)。 今天先講一下三極管的截止和飽和狀態(tài),先不講放大狀態(tài),我怕講多了,你們看到一半不耐煩,然后我文章的閱讀完成率會很低,這樣
2021-02-20 14:45:31
我的蜂鳴器的額定電壓是12V的,芯片用5V來控制三極管的通斷。現(xiàn)在上電三極管導(dǎo)通狀態(tài)下,蜂鳴器會響,實際測三極管UCE=4.2V,UBE=2.8V,蜂鳴器電壓7.8V。但是三極管在飽和狀態(tài)下,UCE
2022-11-05 00:15:11
以通過控制脈沖個來控制角位移量,從而達到準(zhǔn)確定位的目的;同時您可以通過控制脈沖頻率來控制電機轉(zhuǎn)動的速度和加速度,從而達到調(diào)速的目的。2.步進電機分哪幾種?步進電機分三種:永磁式(PM),反
2021-07-08 06:11:15
角位移量,從而達到準(zhǔn)確定位的目的;同時您可以 通過控制脈沖頻率來控制電機轉(zhuǎn)動的速度和加速度,從而達到調(diào)速的目的。2.步進電機分哪幾種?步進電機分三種:永磁式(PM)...
2021-07-08 07:35:46
`在課本以及很多資料上看到,三極管在飽和狀態(tài)下(如圖一):既然Ubc>0,集電結(jié)正偏,那么Ic的電流方向不應(yīng)該是如圖向下的方向吧?應(yīng)該是向上吧?因為Ub>Uc>Ue的啊。`
2013-03-30 15:33:08
LB1909MCGEVB,LB1909MC評估板是一款低飽和電壓步進電機驅(qū)動器IC。它是12V系統(tǒng)產(chǎn)品中電機驅(qū)動器的最佳選擇
2020-06-10 06:20:31
電路仿真圖如下,請問三極管是否進入飽和狀態(tài),為何基極電流為0?
2017-04-08 19:36:06
一般情況下,我們平時在做變壓器,電感器中我們一般會盡量的利用鐵芯導(dǎo)磁率高的特點,不斷的提高效率,但是由于鐵芯本身的限制,通過的磁通量不會無限增大,因此而達到飽和狀態(tài)。而鐵芯達到飽和,磁通量基本不
2023-03-02 15:13:26
步進電機步進電機的模擬使用nexys4板子上的led燈,狀態(tài)圖如下根據(jù)狀態(tài)圖寫代碼,可以使用狀態(tài)機的方法在這里沒有用狀態(tài)機首先還是分頻always@(posedge cp)beginif(innercp
2021-07-07 06:32:57
按鍵可調(diào)速,液晶顯示狀態(tài)速度的步進電機
2013-12-12 15:33:10
無鐵芯電機是一種新型的特種電機,無鐵芯電機的施力部件是放在兩個磁軌之間。它們也稱為U通道電機。施力部件的線圈中沒有鐵芯,這就叫無鐵芯電機。它的銅繞組是包封起來的,位于兩排磁體中心的氣隙內(nèi)。由于
2023-03-14 14:20:08
無鐵芯直線電機的優(yōu)點:1.沒有吸引力 ,無鐵芯直線電機安裝時不需要處理吸引力,因此易于安裝。2..沒有齒槽效應(yīng),容易實現(xiàn)更安定的運動實現(xiàn)更高精度。3.拼接定子,行程可延伸。4.沒有鐵芯意味著更高
2021-08-27 06:00:09
基極注入的電流達到一定程度時,晶體管的飽和程度將加深。最后出現(xiàn)無論基極電流怎么增加,集電極電流將維持不變,此時,晶體管進入深飽和狀態(tài)。在以上敘述中,沒有提到電流的量綱問題。也就是說,晶體管在小電流工作
2012-02-13 01:14:04
機床設(shè)備,步進電機帶動絲杠,驅(qū)動板已經(jīng)有了,只要控制脈沖、方向和讀取限位開關(guān)即可。NI設(shè)備用DAQ卡的DIO。求控制步進電機正轉(zhuǎn)、反轉(zhuǎn)、步數(shù)控制及限位的狀態(tài)機(或其它結(jié)構(gòu))的程序范例。謝謝了!
2015-11-30 19:43:00
下降,當(dāng)電感完全飽和時,電感會變成一個只有線圈直流電阻的電阻DCR。電流會直線上升,達到磁飽和狀態(tài)。3) 可以使用示波器來測量電感的飽和電流和電感量,經(jīng)過與LCR電橋的對比,電感量相差很小。飽和電流的測量結(jié)果與電流疊加測試結(jié)果一致。
2021-11-02 22:27:44
我想問:主要是怎么模擬三極管的飽和狀態(tài)?并且如何區(qū)別和放大狀態(tài)?這在multisim中能否做到?能畫出圖來嗎?
2015-10-27 06:51:43
如圖這個Q1的發(fā)射極接的是一個RL電阻,如果我保證調(diào)節(jié)這個R1電位器使這個Q1的PN結(jié)供電電壓大于0.7V的時候,這個三極管在這種接法下能進入飽和導(dǎo)通狀態(tài)嗎?《電子技術(shù)》書籍上說三極管進入飽和狀態(tài)需
2019-07-17 04:36:08
調(diào)試步進電機出現(xiàn)無法啟動的狀態(tài)怎么解決?
2021-12-21 07:45:30
三極管飽和問題總結(jié):1.在實際工作中,常用Ib*β=V/R作為判斷臨界飽和的條件。根據(jù)Ib*β=V/R算出的Ib值,只是使晶體管進入了初始飽和狀態(tài),實際上應(yīng)該取該值的數(shù)倍以上,才能達到真正的飽和
2015-06-04 17:43:12
低電壓低飽和壓降的步進電機驅(qū)動器FAN8200/FAN8200D及其應(yīng)用:摘要:FAN8200/FAN8200D是美國快捷半導(dǎo)體公司設(shè)計生產(chǎn)的低電壓低飽和壓降單片式步進電機驅(qū)動器集成電路。它帶有雙路9 ! 橋
2009-10-02 15:00:04 1
1 MC33991是Motorola公司生產(chǎn)的兩相步進電機驅(qū)動器,可以準(zhǔn)確地控制步進電機的運動并及時反饋步進電機的工作狀態(tài)。該電路有良好的抗干擾能力,可以靈活地控制驅(qū)動步進電機,是汽
2010-12-03 15:52:3764 FPGA在步進電機控制中的應(yīng)用
步進電機是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機構(gòu)。可以通過控制脈沖數(shù)來控制步進電機的角位移量,從而達到準(zhǔn)確定位的目的,同時可
2009-12-24 16:52:261645 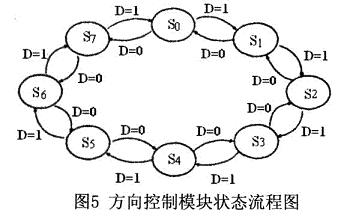
步進電機的應(yīng)用
(一)步進電機的選擇步進電機有步距角(涉及到相數(shù)
2010-01-09 15:11:264026 步進電機發(fā)熱是否屬于正常現(xiàn)象,一般溫度范圍是多少? 1、電機發(fā)熱的原理: 我們通常見到的各類電機,內(nèi)部都是有鐵芯和繞組線圈的。繞組有電阻,通電
2010-06-03 09:49:171222 電子發(fā)燒友網(wǎng)站提供《談晶體管的飽和狀態(tài)和飽和壓降.doc》資料免費下載
2017-04-17 21:38:000 的方向轉(zhuǎn)一個固定的角度(步進角或步距角),通過控制脈沖數(shù)和脈沖頻率來控制電機角位移量及電機轉(zhuǎn)速從而達到精確的開環(huán)控制。
2016-08-29 18:59:592380 
直線步進電機,或稱線性步進電機,是由磁性轉(zhuǎn)子鐵芯通過與由定子產(chǎn)生的脈沖電磁場相互作用而產(chǎn)生轉(zhuǎn)動,直線步進電機在電機內(nèi)部把旋轉(zhuǎn)運動轉(zhuǎn)化為線性運動。
2017-08-11 18:09:332523 在正常情況下,電流互感器中的鐵芯磁通處于不飽和的狀態(tài)。這時負載阻抗和勵磁電流較小,而勵磁阻抗的數(shù)值較大,一次繞組、二次繞組的磁勢處于平衡。但是,若互感器中鐵芯的磁通密度增大并達到飽和時,會引起Zm
2017-08-12 11:11:417987 
以前自己有研究過S曲線加減速,步進電機盡量都跑這種曲線,原因就是當(dāng)電機驅(qū)動器給電機一個較高的頻率的時候,步進電機很可能反應(yīng)不過來,造成堵轉(zhuǎn),或者這個頻率變化的斜率太大剛由低頻起轉(zhuǎn)突然就變到高頻了一樣
2017-11-27 18:36:259 在實際工作中,常用Ib*β=V/R作為判斷臨界飽和的條件。根據(jù)Ib*β=V/R算出的Ib值,只是使晶體管進入了初始飽和狀態(tài),實際上應(yīng)該取該值的數(shù)倍以上,才能達到真正的飽和;倍數(shù)越大,飽和程度就越深。
2017-11-29 13:08:0532874 
步進拖動的特性由驅(qū)動線路、機械結(jié)構(gòu)和步進電動機各自的特性所決定。步進電機的工作狀態(tài)可以分為靜態(tài)、穩(wěn)態(tài)和過渡態(tài)三種。
2018-02-07 12:48:0811718 三極管的飽和及深度飽和狀態(tài)。三極管飽和問題總結(jié):1.在實際工作中,常用Ib*β=V/R作為判斷臨界飽和的條件。根據(jù)Ib*β=V/R算出的Ib值,只是使晶體管進入了初始飽和狀態(tài),實際上應(yīng)該取該值的數(shù)倍
2018-03-04 17:09:5942308 
轉(zhuǎn)動一個固定的角度(即步進角)。可以通過控制脈沖個數(shù)來控制角位移量,從而達到準(zhǔn)確定位的目的。那么什么是混合式步進電機,混合式步進電機和反應(yīng)式步進電機有什么區(qū)別嗎?接下來跟隨小編詳細的來了解一下混合式步進電機。
2018-04-25 10:59:1115748 在實際工作中,常用Ib*β=V/R作為判斷臨界飽和的條件。根據(jù)Ib*β=V/R算出的Ib值,只是使晶體管進入了初始飽和狀態(tài),實際上應(yīng)該取該值的數(shù)倍以上,才能達到真正的飽和;倍數(shù)越大,飽和程度就越深。
2018-06-06 16:48:3011035 
的。可以通過控制脈沖個數(shù)來控制角位移量,從而達到準(zhǔn)確定位的目的;同時可以通過控制脈沖頻率來控制電機轉(zhuǎn)動的速度和加速度,從而達到調(diào)速和定位的目的。那么七特步進電機驅(qū)動器有哪些型號呢,下面給大家介紹下七特步進
2018-11-21 15:32:401425 可以達到準(zhǔn)確定位的目的,同時還可以通過控制脈沖頻率用來控制電機轉(zhuǎn)動的速度和加速度,從而可以達到調(diào)節(jié)轉(zhuǎn)動速度的目的。步進電機可以將電脈沖信號轉(zhuǎn)變成為角位移或者是線位移的開環(huán)控制元步進電機件,一般在非超載
2018-12-13 16:50:243340 步進電機失步的原因和對策 步進電機可以根據(jù)脈沖數(shù)和脈沖頻率來對電機實現(xiàn)開環(huán)控制位置和速度,是一種便宜、簡單好用的控制類電機,在自動化控制領(lǐng)域得到越來越廣泛的應(yīng)用。但由于步進電機不是閉環(huán)控制,選型或者
2020-06-28 17:25:1512072 在步進電機這塊我并不內(nèi)行,但還是想簡單說一下自己的看法。電機分為兩種,伺服電機和步進電機,市場上更傾向于伺服電機,但是它的價格偏高,根據(jù)精度選擇合適的步進電機可以達到節(jié)約成本的目的,步進電機也是電機
2020-01-11 09:37:146901 鐵芯的磁通密度擴大并做到飽和狀態(tài)時,會引|起Zm伴隨著對比度的提升而快速減少,不一樣勵磁調(diào)節(jié)器電流間的線形占比關(guān)聯(lián)會被擺脫。而引|起電流互感器做到飽和狀態(tài)的要素關(guān)鍵包含:電流過大;負荷過大。當(dāng)聯(lián)接電流互感器的負荷過大時
2021-02-22 10:56:132062 步進電機主要是依相數(shù)來做分類的,通常我們常見的有四相、二相、三相等幾類。 ? ? ? ? ?二相步進電機與三相步進電機的區(qū)別: 電機的相數(shù) 是指電機內(nèi)部的線圈數(shù)不同,二相步進電機電機內(nèi)部是由2個線圈
2021-07-20 14:32:168933 步進電機主要是依相數(shù)來做分類的,通常我們常見的有四相、二相、三相等幾類。 ? ? ? ? ?二相步進電機與三相步進電機的區(qū)別: 電機的相數(shù) 是指電機內(nèi)部的線圈數(shù)不同,二相步進電機電機內(nèi)部是由2個線圈
2021-08-03 14:12:5015851 應(yīng)式步進電機,是一種傳統(tǒng)的步進電機,由磁性轉(zhuǎn)子鐵芯通過與由定子產(chǎn)生的脈沖電磁場相互作用而產(chǎn)生轉(zhuǎn)動。反應(yīng)式步進電動機的結(jié)構(gòu)形式很多,按定轉(zhuǎn)子鐵芯的段數(shù)分為單段式和多段式兩種。 ? ?反應(yīng)式步進電機
2021-08-04 09:42:255495 今天這篇文章主要來跟大家說說步進電機轉(zhuǎn)速的相關(guān)問題。其實步進電機允許最高轉(zhuǎn)速是多少?這是個重要的問題。不同型號的步進電機使用不同的驅(qū)動器所能達到的最高轉(zhuǎn)速是不一樣的。 先來了解一下什么是步進電機
2021-09-22 15:46:524200 步進電機是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機構(gòu)。通俗一點講:當(dāng)步進驅(qū)動器接受到一個脈沖信號,它就驅(qū)動步進電機按設(shè)定的方向轉(zhuǎn)動一個固定的角度(既步進角)。您可以通過控制脈沖個數(shù)來控制角位移量,從而達到
2021-10-28 15:51:1212 和磁場一致,即使再增加外磁場,磁芯也沒有可以旋轉(zhuǎn)的磁疇了,此時的電感就進入了飽和狀態(tài)。 從另一個角度來看,如圖2所示的磁化曲線,磁通密度B與磁場強度H之間滿足圖2中右側(cè)公式:當(dāng)磁通密度達到Bm時,磁通密度不再隨磁場強度的增大而
2021-10-29 11:26:4328786 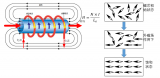
1、什么是三極管的倒置狀態(tài)?
集電結(jié)正偏,發(fā)射結(jié)反偏,為倒置狀態(tài);集電結(jié)正偏,發(fā)射結(jié)正偏,為飽和狀態(tài);集電結(jié)反偏,發(fā)射結(jié)反偏,為倒截止態(tài);集電結(jié)反偏,發(fā)射結(jié)正偏,為放大狀態(tài);
2022-02-10 09:34:306 步進電機是什么?步進電機不轉(zhuǎn)怎么辦?小編教你解決步進電機不轉(zhuǎn)問題 日常生活中電機大家肯定都聽說過,但是步進電機或許就會有些陌生了,步進電機在一些領(lǐng)域起著相當(dāng)大的作用,但是步進電機不轉(zhuǎn)的情況時有出現(xiàn)
2022-04-14 10:51:3515672 步進電機的旋轉(zhuǎn)是以固定的角度一步一步運行的,可以通過控制脈沖個數(shù)來控制角位移量,從而達到準(zhǔn)確定位的目的,同時可以通過控制脈沖頻率,來控制電機轉(zhuǎn)動的速度和加速度,從而達到調(diào)速的目的。步進電機多用于數(shù)字式計算機的外部設(shè)備,以及打印機、繪圖機和磁盤等裝。
2022-09-05 15:24:286981 隨著電力系統(tǒng)的不斷發(fā)展,對繼電保護以及電氣設(shè)備的自動化程度要求越來越高,電流互感器就暴露出一個嚴(yán)重的弊端,就是鐵芯磁飽和問題。 ? ? ?一般來說鐵芯磁飽和分為2類:一類是由于線路短路時穩(wěn)態(tài)對稱電流
2022-10-27 09:43:496440 一般電機鐵芯損耗有兩個原因: ? ? 1.硅鋼片質(zhì)量不符合要求 ? ? 硅鋼片作為電動機的主要導(dǎo)磁材料,其性能符合性對電機性能影響極大,主要是保證硅鋼片的牌號符合設(shè)計要求,另外就是相同牌號的在硅鋼片
2022-11-10 09:13:182034 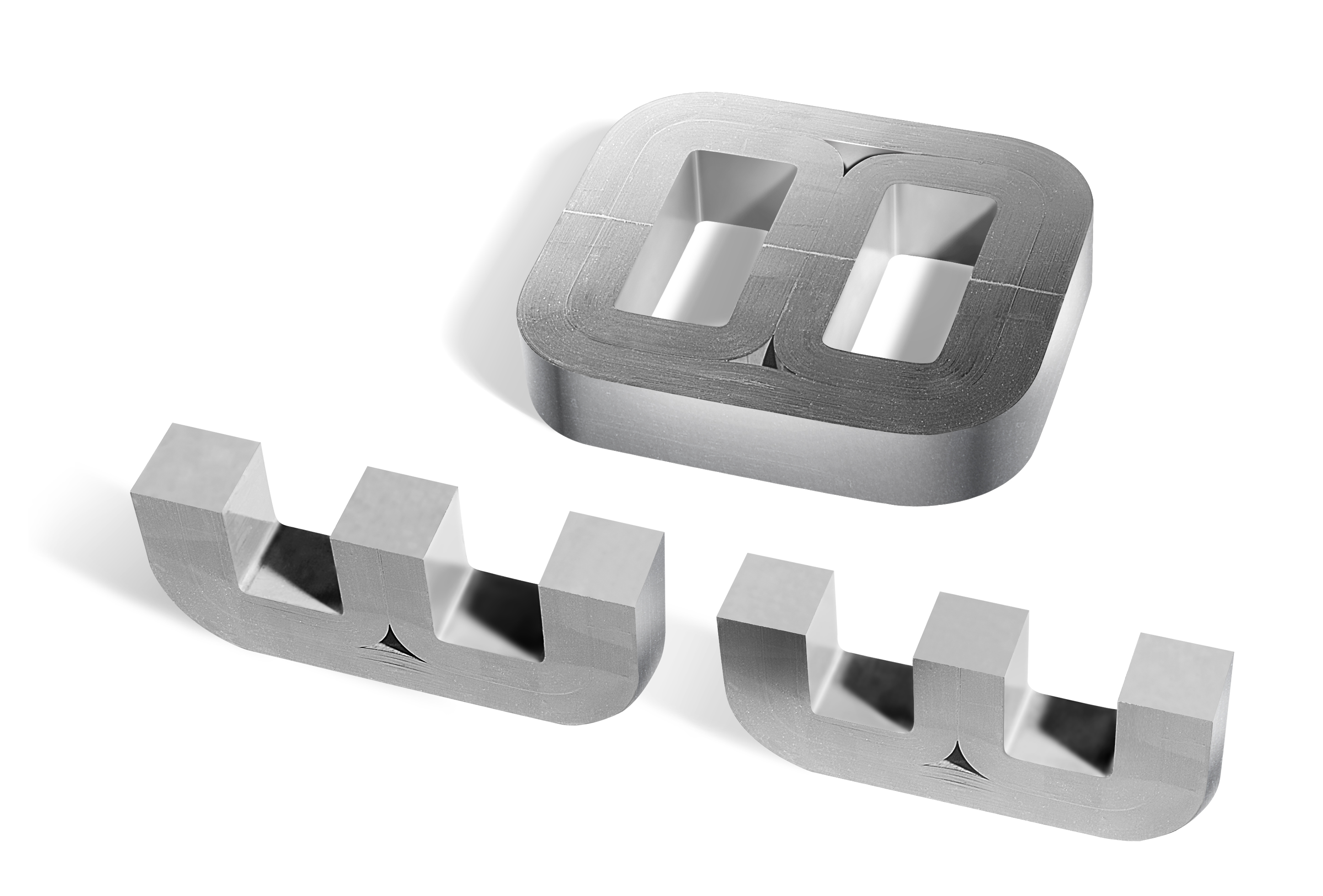
如下圖,是IGBT產(chǎn)品典型的輸出特性曲線,橫軸是C,E兩端電壓,縱軸是歸一化的集電極電流。可以看到IGBT工作狀態(tài)分為三個部分。
2022-12-16 15:29:044942 正偏,集電結(jié)反偏時,三極管處于放大狀態(tài),當(dāng)發(fā)射結(jié)與集電結(jié)都正偏的時候,三極管處于飽和狀態(tài),而當(dāng)發(fā)射結(jié)反偏時,三極管處于截止狀態(tài)。 當(dāng)Ib為定值,Vc為0的時候,飽和區(qū)Ic在曲線上應(yīng)當(dāng)為0,但在上面那個兩個二極管雙正偏的模型中,Ic不但有
2022-12-18 15:34:173704 
步進電機的步距角是指電機在每一步運動時所轉(zhuǎn)動的角度,一般用度數(shù)(°)來表示。常見的步進電機的步距角有1.8度、0.9度、0.45度、0.36度等。其中1.8度是最常見的步進電機步距角,也是最為普遍的一種。
2023-03-03 11:00:275754 步進電機的使能信號是控制步進電機啟停的信號。通常情況下,步進電機的驅(qū)動器會提供一個使能信號輸入端口,當(dāng)該輸入端口處于使能狀態(tài)時,步進電機才能接受控制信號并工作;當(dāng)該輸入端口處于禁止狀態(tài)時,步進電機將停止工作,不再接受控制信號。
2023-03-03 11:03:3011525 步進電機在長時間堵轉(zhuǎn)的情況下會因為過熱而導(dǎo)致?lián)p壞甚至燒毀電機,因此應(yīng)盡可能避免步進電機堵轉(zhuǎn)。
步進電機堵轉(zhuǎn)可能是由于機械阻力過大、驅(qū)動電壓不足或者驅(qū)動電流不足等原因引起的。在設(shè)計和使用步進
2023-03-08 16:00:164198 步進電機是一種可以與脈沖信號同步準(zhǔn)確地控制旋轉(zhuǎn)角度和轉(zhuǎn)速的電機,步進電機的也稱為“脈沖電機”。由于步進電機無需使用位置傳感器僅通過開環(huán)控制即可實現(xiàn)準(zhǔn)確的定位而被廣泛用??于需要定位的設(shè)備中。
2023-03-09 11:49:321227 
------一個固定的角度(及步進角)。可以通過控制脈沖個來控制角位移量,從而達到準(zhǔn)確定位的目的;同時可以通過控制脈沖頻率來控制電機轉(zhuǎn)動的速度和
加速度,從而達到調(diào)速的目的。
2023-03-16 10:29:3611 步進電機的驅(qū)動方式可以描述為:
1、步進電機是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機構(gòu)。
2、當(dāng)步進驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進電機按設(shè)定的方向轉(zhuǎn)動一個固定的角度(及步進角)。
3、通過
2023-03-16 14:04:533 、42、57、86、110等3、步進電動機構(gòu)造:由轉(zhuǎn)子(轉(zhuǎn)子鐵芯、永磁體、轉(zhuǎn)軸、滾珠軸承),定子(繞組、定子鐵芯),前后端蓋等組成。最典型兩相混合式步進電機的定子有8個大齒,40個小齒,轉(zhuǎn)子有50個小齒;
2023-03-21 15:05:040 步進電機一般由前后端蓋、軸承、中心軸、轉(zhuǎn)子鐵芯、定子鐵芯、定子組件、波紋墊圈、螺釘?shù)炔糠纸M成,與直流電機不同的是,步進電機內(nèi)部有很多線圈在定子上用來產(chǎn)生磁場,中間是一個永磁體, 會隨著外部線圈磁場
2023-03-22 10:39:360 步進電機步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。
步進電機收到一個脈沖,步進電機走一個步距角。
在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于控制脈沖信號的頻率和脈沖數(shù)
2023-03-22 10:42:590 步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),
當(dāng)步進驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進電機按設(shè)定的方向轉(zhuǎn)動一個固定的角度
2023-03-22 11:32:550 電機正反轉(zhuǎn);S2長按步進電機暫停;S3按下步進電機反轉(zhuǎn)時高速狀態(tài);S4按下步進電機反轉(zhuǎn)時為低速狀態(tài)。(反轉(zhuǎn)時默認高速狀態(tài))
2023-03-23 14:13:041 三極管ON狀態(tài)時工作于飽和區(qū),導(dǎo)通電流Ice主要由Ib與Vce決定,由于三極管的基極驅(qū)動電流Ib一般不能保持恒定,因而Ice就不能簡單的僅 由Vce來決定,即不能采用飽和Rce來表示(因Rce會變化)。由于飽和狀態(tài)下Vce較小,所以三極管一般用飽和Vce表示。
2023-06-05 14:26:59425 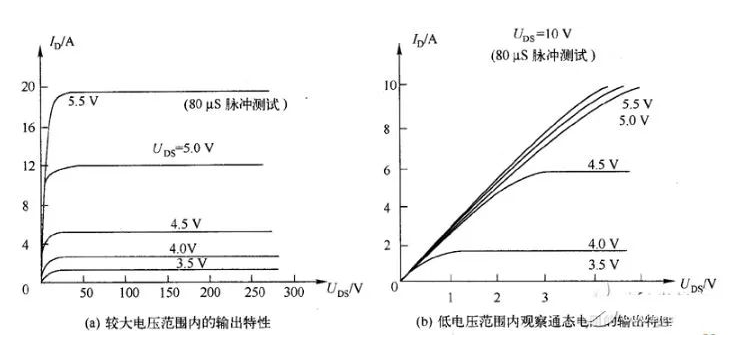
上安裝風(fēng)扇,通過風(fēng)扇將電機周圍的空氣循環(huán)起來,加速熱量的散發(fā),以達到散熱的目的。 (2)散熱片散熱法:在步進電機表面安裝散熱片,通過散熱片將電機內(nèi)部的熱量傳遞到外部,加速熱量的散發(fā),以達到散熱的目的。 (3)液冷散熱法
2023-06-10 08:05:02588 減速電機的鐵芯工作磁密度可分為高低兩類。
2022-01-12 14:26:49340 
步進電機作為一種常用、應(yīng)用廣泛的驅(qū)動電機,通常會搭配減速設(shè)備一起使用,以達到理想傳動效果;而步進電機常用的減速設(shè)備和方法,有如減速齒輪箱、編碼器、控制器、脈沖信號等。
2023-10-05 09:29:00503 1.步進電機配減速機的原因步進電機切換定子相電流的頻率,如改變步進電機驅(qū)動電路的輸入脈沖,使其變成低速運動。低速步進電機在等待步進指令時,轉(zhuǎn)子處于停止狀態(tài),在低速步進時,速度波動會很大,此時如改為
2023-09-25 08:08:49863 
什么是三極管的飽和工作狀態(tài)?如何才能讓使三極管進入飽和工作狀態(tài)呢? 三極管的飽和工作狀態(tài)是一種特殊的工作狀態(tài),當(dāng)三極管被置于飽和狀態(tài)時,電流和電壓都達到最大值,且三極管的飽和電壓(V_CE_sat
2023-11-23 09:13:563195 變壓器:飽和變壓器是指在磁化過程中發(fā)生飽和現(xiàn)象的變壓器。當(dāng)電流通過變壓器的線圈時,磁通密度逐漸增加,但在一定電流值之后,鐵芯的磁通密度不再增加,達到了磁通飽和狀態(tài)。此時,變壓器的磁增益減小,磁感應(yīng)強度與磁勢強度的關(guān)系
2023-11-23 14:26:05318 電感如何達到飽和狀態(tài)?飽和如何影響電路?檢測電感飽和的方法? 電感的飽和狀態(tài)是指電感中的鐵芯飽和,這意味著鐵芯中的磁感應(yīng)強度已經(jīng)達到了鐵芯所能承受的最大值,無法再隨著電流的增加而繼續(xù)增加。電感的飽和
2023-11-29 11:09:33844 什么是飽和變壓器?飽和變壓器的特點有哪些?飽和變壓器的應(yīng)用場景有哪些? 飽和變壓器是一種特殊的變壓器,其特點是在工作過程中磁路會進入飽和狀態(tài)。飽和變壓器一般由磁路組成,通常由鐵芯和繞組構(gòu)成。 飽和
2024-01-30 17:21:06228 交互和電流施加。 首先,步進電機通過磁場交互來產(chǎn)生轉(zhuǎn)動。它包括兩個主要部分:定子和轉(zhuǎn)子。定子是由一些線圈組成的,這些線圈固定在電機的外部,通常被稱為相。而轉(zhuǎn)子則是電機的轉(zhuǎn)動部分,它帶有永磁體或者鐵芯,通常被稱
2024-02-14 17:07:00357 步進電機丟步的原因和解決方法 步進電機是一種常見的電動機類型,特點是可以實現(xiàn)精確的位置控制和旋轉(zhuǎn)運動。然而,在實際使用過程中,步進電機有時會出現(xiàn)丟步的現(xiàn)象,即無法按照預(yù)定步長準(zhǔn)確移動。這種情況可能會
2024-02-01 16:32:47706 ,以實現(xiàn)更高的性能和靈活性。在結(jié)構(gòu)設(shè)計上,混合式步進電機采納了VR型電機的齒輪狀鐵芯轉(zhuǎn)子,這使得它能夠通過機械加工達到較小的步距角,同時結(jié)合了PM型電機的強力永磁體,以增強轉(zhuǎn)矩輸出,實現(xiàn)了小型化與高轉(zhuǎn)矩的并存。 混合式步進電機的轉(zhuǎn)子設(shè)計獨特,它由兩
2024-02-06 10:01:46236 
退飽和電路的實現(xiàn)機理是什么樣的?IGBT退飽和過程和保護 退飽和電路的實現(xiàn)機理是當(dāng)IGBT工作在飽和狀態(tài)時,通過引入一定的電路設(shè)計和調(diào)整,使IGBT在過載或故障情況下能夠自動退出飽和狀態(tài),以保護
2024-02-18 14:51:51426
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論