由邏輯輸入MODEx選擇。輸出驅(qū)動(dòng)能力達(dá)到38V和±3.5A。HR8828的衰減模式可編程。譯碼器是HR8828易于實(shí)施的關(guān)鍵。通過STEP簡(jiǎn)單的輸入一個(gè)脈沖就可以使電機(jī)完成一次步進(jìn),省去了相序表
2018-05-29 10:16:00
**步進(jìn)電機(jī)開環(huán)控制步進(jìn)電機(jī)開環(huán)伺服系統(tǒng)的一般構(gòu)成步進(jìn)電動(dòng)機(jī)的電樞通斷電次數(shù)和各相通電順序決定了輸出角位移和運(yùn)動(dòng)方向,控制脈沖分配頻率可實(shí)現(xiàn)步進(jìn)電動(dòng)機(jī)的速度控制。因此,步進(jìn)電機(jī)控制系統(tǒng)一般采用開環(huán)
2021-07-07 06:56:09
《計(jì)算機(jī)控制技術(shù)課程設(shè)計(jì)(論文)步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)》由會(huì)員分享,可在線閱讀,更多相關(guān)《計(jì)算機(jī)控制技術(shù)課程設(shè)計(jì)(論文)步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)(23頁(yè)珍藏版)》請(qǐng)?jiān)谌巳宋膸?kù)網(wǎng)上搜索。1、課 程 設(shè) 計(jì)
2021-09-01 07:50:15
步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)一個(gè)開環(huán)步進(jìn)電機(jī)控制系統(tǒng)。使得步進(jìn)電機(jī)能夠正常運(yùn)轉(zhuǎn)。并能實(shí)現(xiàn)啟停、正反轉(zhuǎn)、調(diào)速控制。以及顯示速度。2.設(shè)計(jì)要求如下:①硬件測(cè)試通過。接線完成。三個(gè)芯片分別測(cè)試通過。步進(jìn)電機(jī)
2021-06-29 06:48:40
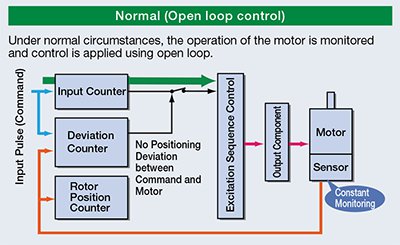
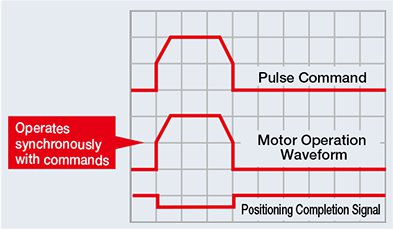
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),是現(xiàn)代數(shù)字程序控制系統(tǒng)中的主要執(zhí)行元件,應(yīng)用極為廣泛。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受
2023-03-01 10:29:10
求問各位大神啊,基于單片機(jī)的步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)控制系統(tǒng)怎么設(shè)計(jì)啊,用什么來實(shí)現(xiàn)細(xì)分驅(qū)動(dòng)啊,求一個(gè)思路。。
2017-02-05 10:58:32
關(guān)于混合動(dòng)力汽車雙向DCDC變換器控制系統(tǒng)的設(shè)計(jì)
2022-05-10 20:17:28
不同轉(zhuǎn)速在地面上滾動(dòng)而無滑動(dòng)。對(duì)于采用混合驅(qū)動(dòng)技術(shù)的電動(dòng)車來說,電機(jī)驅(qū)動(dòng)輪之間同樣存在轉(zhuǎn)速協(xié)調(diào)控制的問題。電動(dòng)輪電子差速技術(shù)已經(jīng)成為混合動(dòng)力整車控制系統(tǒng)必須解決的問題。本文所設(shè)計(jì)的混合動(dòng)力汽車采用輪轂驅(qū)動(dòng)
2009-05-17 11:44:27
混合式步進(jìn)電機(jī)的驅(qū)動(dòng)原理是什么?混合式步進(jìn)電機(jī)的結(jié)構(gòu)是由哪些部分組成的?混合式步進(jìn)電機(jī)如何去實(shí)現(xiàn)輸出控制呢?
2021-12-21 06:29:50
混合式步進(jìn)電機(jī)的結(jié)構(gòu)和驅(qū)動(dòng)原理是什么?如何產(chǎn)生Spwm?
2021-12-21 07:20:31
單片機(jī)步進(jìn)電機(jī)控制器是什么?怎樣去制作一種單片機(jī)電動(dòng)機(jī)控制器?D306型號(hào)三相伺服混合式步進(jìn)電機(jī)驅(qū)動(dòng)器具有哪些特點(diǎn)?怎樣去使用D306三相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器?
2021-07-13 08:09:56
單片機(jī)實(shí)現(xiàn)的步進(jìn)電機(jī)控制系統(tǒng)具有成本低、使用靈活的特點(diǎn),廣泛應(yīng)用于數(shù)控機(jī)床、機(jī)器人,定量進(jìn)給、工業(yè)自動(dòng)控制以及各種可控的有定位要求的機(jī)械工具等應(yīng)用領(lǐng)域。步進(jìn)電機(jī)是數(shù)字控制電機(jī),將脈沖信號(hào)轉(zhuǎn)換成角位移
2021-04-01 16:47:56
兩相混合式步進(jìn)電機(jī)H橋驅(qū)動(dòng)電路設(shè)計(jì)原理
2021-02-19 06:00:06
二相步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)1步進(jìn)電機(jī)介紹1.1步進(jìn)電機(jī)特點(diǎn)步進(jìn)電機(jī)(stepping motor)是將電脈沖信號(hào)轉(zhuǎn)換成相應(yīng)的角位移或線位移的一種特殊電機(jī)。電動(dòng)機(jī)每輸入一次電脈沖信號(hào),電動(dòng)機(jī)就轉(zhuǎn)動(dòng)一個(gè)
2021-09-10 08:11:50
誰有PL2303的驅(qū)動(dòng)適合win8的 謝謝啦 還有我用L298驅(qū)動(dòng)二相混合式步進(jìn)電機(jī)怎動(dòng)不了求一個(gè)不帶按鍵的C程序 謝謝大神
2015-12-31 12:08:24
二相混合式步進(jìn)電機(jī)simulink仿真模型怎么搭建?
2021-10-28 07:53:18
控制(或SVPWM控制)使用滯環(huán)電流pwm控制,因此需要在電流反饋回路加入低通濾波?也可以使用SVPWM控制,在我的另一篇文章中有提(二相混合式步進(jìn)電機(jī)閉環(huán)矢量控制simulink仿真(含仿真文件
2020-06-14 22:33:19
在位置跟蹤伺服系統(tǒng)中二相混合式步進(jìn)電機(jī)閉環(huán)矢量控制simulink仿真閉環(huán)矢量控制系統(tǒng)simulink圖?閉環(huán)矢量控制系統(tǒng)系統(tǒng)結(jié)構(gòu)框圖?二相混合式步進(jìn)電機(jī)的數(shù)學(xué)模型矩角特性?其中 Nr-轉(zhuǎn)子齒數(shù)
2020-06-14 22:35:18
關(guān)于HSC86H SUMTOR 混合步進(jìn)伺服電機(jī)驅(qū)動(dòng)器的知識(shí)點(diǎn)看完就懂了
2021-09-30 06:20:18
步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)原理步進(jìn)電機(jī)控制系統(tǒng)硬件電路設(shè)計(jì)步進(jìn)電機(jī)控制系統(tǒng)軟件設(shè)計(jì)步進(jìn)電機(jī)控制系統(tǒng)的檢測(cè)
2021-03-03 07:47:32
EVAL6207N,用于特色L6207的評(píng)估板是高度集成的混合信號(hào)電源IC,允許用戶輕松設(shè)計(jì)用于雙相雙極步進(jìn)電機(jī),多個(gè)直流電機(jī)和各種電感負(fù)載的控制系統(tǒng)
2020-05-19 09:24:09
求助畢業(yè)設(shè)計(jì)基于LabVIEW下的步進(jìn)電機(jī)自動(dòng)升降控制系統(tǒng)設(shè)計(jì)1.利用LabVIEW構(gòu)建信號(hào)發(fā)生和檢測(cè)裝置;2.合理的選擇測(cè)量元件; 3.控制系統(tǒng)的設(shè)計(jì)及調(diào)試;4.調(diào)速方案的測(cè)試與性能比較 最終設(shè)計(jì)出步進(jìn)電機(jī)的自動(dòng)升降系統(tǒng),控制工作臺(tái)使其控制精度達(dá)到±0.02;可不可以進(jìn)行純軟件仿真?一頭霧水中
2017-04-25 16:57:52
基于STM32的步進(jìn)電機(jī)控制系統(tǒng)
2019-08-19 22:28:28
本帖最后由 南中南 于 2016-1-7 11:05 編輯
針對(duì)多步進(jìn)電機(jī)控制系統(tǒng)的要求,設(shè)計(jì)了基于STM32和MSP430的分布式多步進(jìn)電機(jī)控制系統(tǒng)。分享下
2016-01-07 10:16:17
基于C++Builder下環(huán)狀閥片位移檢測(cè)系統(tǒng)的設(shè)計(jì)基于單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)前 言步進(jìn)電機(jī)是一種進(jìn)行精確步進(jìn)運(yùn)動(dòng)的機(jī)電執(zhí)行元件,它廣泛應(yīng)用于工業(yè)機(jī)械的數(shù)字控制,為使系統(tǒng)的可靠性、通用性、可維護(hù)性
2021-06-29 09:51:59
基于單片機(jī)的步進(jìn)電機(jī)開環(huán)控制系統(tǒng)摘要: 通過ATMEL89C51單片機(jī)對(duì)步進(jìn)電機(jī)進(jìn)行控制,主要介紹了步進(jìn)電機(jī)控制器、驅(qū)動(dòng)電路和LED顯示電路的設(shè)計(jì),實(shí)現(xiàn)了步進(jìn)電機(jī)的開環(huán)控制。在步進(jìn)電機(jī)控制器的設(shè)計(jì)中
2009-08-26 15:03:12
如何使用uln2003驅(qū)動(dòng)39BYG混合式1.8°步進(jìn)角的步進(jìn)電機(jī)?
2021-10-28 07:24:24
如何設(shè)計(jì)一個(gè)開環(huán)步進(jìn)電機(jī)控制系統(tǒng)?
2021-10-15 06:43:25
怎么實(shí)現(xiàn)基于51單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)?
2021-10-19 08:01:35
本文應(yīng)用時(shí)間觸發(fā)模式設(shè)計(jì)了液壓式制動(dòng)能量再生系統(tǒng)的電子控制系統(tǒng)混合調(diào)度器,實(shí)現(xiàn)了HBRS的基本功能。
2021-05-13 07:07:06
STK672-040GEVB,STK672-040步進(jìn)電機(jī)控制評(píng)估板。本評(píng)估板描述了STK672系列評(píng)估板的設(shè)置和使用,該評(píng)估板用于厚膜混合IC單極恒流斬波電路,內(nèi)置微步進(jìn)控制器步進(jìn)電機(jī)驅(qū)動(dòng)器設(shè)備STK672-040-E
2020-08-28 11:45:17
步進(jìn)電機(jī)的工作原理是什么?怎樣去設(shè)計(jì)步進(jìn)電機(jī)控制系統(tǒng)的硬件部分?怎樣去設(shè)計(jì)步進(jìn)電機(jī)控制系統(tǒng)的軟件部分?步進(jìn)電機(jī)控制系統(tǒng)的端口地址有哪些?
2021-06-29 08:00:42
怎樣去設(shè)計(jì)一種基于CAN總線的并聯(lián)式混合動(dòng)力電動(dòng)車控制系統(tǒng)?并聯(lián)式混合動(dòng)力電動(dòng)車控制系統(tǒng)有哪些應(yīng)用?并聯(lián)式混合動(dòng)力電動(dòng)車控制系統(tǒng)的通訊管理是怎樣的?
2021-07-01 09:24:21
三相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器B3C的工作原理根據(jù)正弦電流細(xì)分驅(qū)動(dòng)的原理,設(shè)計(jì)出三相混合式細(xì)分型步進(jìn)電機(jī)驅(qū)動(dòng)器,系統(tǒng)采用電流跟蹤和脈寬調(diào)制技術(shù),使電機(jī)的相電流為相位相
2008-12-19 01:36:33 136
136 DSA和CAN總線的步進(jìn)電機(jī)控制系統(tǒng):步進(jìn)電機(jī)可直接接收脈沖信號(hào)的控制,適用于數(shù)字控制系統(tǒng)。
2009-04-02 11:12:4528 直線步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)說明:介紹了直線步進(jìn)電機(jī)的優(yōu)點(diǎn)和組成。
2009-04-02 12:09:2735 本文介紹了森創(chuàng)-兩相混合式步進(jìn)電機(jī)的組成部分及優(yōu)點(diǎn)。
2009-04-02 13:59:38100 本文應(yīng)用單片機(jī)、步進(jìn)電機(jī)驅(qū)動(dòng)芯片、字符型LCD 和鍵盤陣列, 構(gòu)建了集步進(jìn)電機(jī)控制器和驅(qū)動(dòng)器為一體的步進(jìn)電機(jī)控制系統(tǒng)。二維工作臺(tái)作為被控對(duì)象通過步進(jìn)電機(jī)驅(qū)動(dòng)滾珠絲桿在X/
2009-04-06 17:12:3141 介紹由美國(guó)TI公司的數(shù)字信號(hào)處理器TMS320LF2407A和SGS公司的步進(jìn)電機(jī)驅(qū)動(dòng)芯片PBL3717A構(gòu)成的兩相混合式步進(jìn)電機(jī)的控制系統(tǒng)。
2009-05-16 13:46:2427 小激光器實(shí)驗(yàn)系統(tǒng)有多臺(tái)混合式步進(jìn)電機(jī)和反應(yīng)式步進(jìn)電機(jī)需要控制,無論是靶丸的空間位置調(diào)節(jié),還是光路中波片的調(diào)節(jié)都離不開步進(jìn)電機(jī)的精確控制。通過PCL839 運(yùn)動(dòng)控制卡以及
2009-06-24 09:41:5618 本文以三容水箱為對(duì)象,通過對(duì)C/S 模式與B/S 模式的分析與研究,設(shè)計(jì)了一種基于混合模式1的遠(yuǎn)程控制系統(tǒng)。混合模式中控制數(shù)據(jù)的傳輸采用C/S 模式,而B/S 模式則用于發(fā)布C/S 模式
2009-08-10 14:33:4714 基于單片機(jī)的步進(jìn)電機(jī)開環(huán)控制系統(tǒng):通過ATMEL89C51單片機(jī)對(duì)步進(jìn)電機(jī)進(jìn)行控制,主要介紹了步進(jìn)電機(jī)控制器、驅(qū)動(dòng)電路和LED顯示電路的設(shè)計(jì),實(shí)現(xiàn)了步進(jìn)電機(jī)的開環(huán)控制。在步進(jìn)電機(jī)
2009-08-25 18:27:01102 本文應(yīng)用單片機(jī)、步進(jìn)電機(jī)驅(qū)動(dòng)芯片、字符型LCD和鍵盤陣列,構(gòu)建了集步進(jìn)電機(jī)控制器和驅(qū)動(dòng)器為一體的步進(jìn)電機(jī)控制系統(tǒng)。二維工作臺(tái)作為被控對(duì)象通過步進(jìn)電機(jī)驅(qū)動(dòng)滾珠絲桿
2009-09-10 09:19:3033 根據(jù)水性涂料的混合攪拌工藝特點(diǎn)和單容混合器的不足,提出了一種雙容結(jié)構(gòu)的混合器。在介紹實(shí)驗(yàn)樣機(jī)組成結(jié)構(gòu)的基礎(chǔ)上,闡述了基于PLC 和組態(tài)王二級(jí)結(jié)構(gòu)電氣控制系統(tǒng)的設(shè)計(jì)
2010-01-11 15:59:0716 二相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器的優(yōu)化設(shè)計(jì):從 改善步進(jìn)電機(jī)動(dòng)靜態(tài)性能的角度出發(fā),給出了基于8051的二相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器的優(yōu)化設(shè)計(jì)方案,主要介紹了系統(tǒng)結(jié)構(gòu)、通訊策略、
2010-01-14 09:44:21100 論文介紹了步進(jìn)電機(jī)的控制原理,利用脈沖疊加原理,以Verilog HDL 為實(shí)體設(shè)計(jì)輸入,設(shè)計(jì)并實(shí)現(xiàn)了一套集成于FPGA 內(nèi)部的步進(jìn)電機(jī)控制系統(tǒng)。該系統(tǒng)可以控制步進(jìn)電機(jī)實(shí)現(xiàn)定速、加速
2010-01-18 14:52:31314 本文介紹了一種的新型的步進(jìn)電機(jī)控制系統(tǒng),采用DSP作為控制器,構(gòu)建步進(jìn)電機(jī)的驅(qū)動(dòng)系統(tǒng),并在此基礎(chǔ)上實(shí)現(xiàn)細(xì)分角度和電流的實(shí)時(shí)運(yùn)算。利用其片內(nèi)集成的事件管理模塊通過軟
2010-02-21 14:14:0033 論文介紹了步進(jìn)電機(jī)的控制原理,利用脈沖疊加原理,以Verilog HDL為實(shí)體設(shè)計(jì)輸入,設(shè)計(jì)并實(shí)現(xiàn)了一套集成于FPGA內(nèi)部的步進(jìn)電機(jī)控制系統(tǒng)。該系統(tǒng)可以控制步進(jìn)電機(jī)實(shí)現(xiàn)定速、加速、減
2010-07-13 16:14:4045 摘要:介紹了一種基于微機(jī)和單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng),利用上、下位機(jī)控制步進(jìn)電機(jī)的多種運(yùn)行方式,可實(shí)現(xiàn)步進(jìn)電機(jī)正反轉(zhuǎn)控制以及步進(jìn)電機(jī)的無級(jí)調(diào)速。程序采用模塊化設(shè)計(jì),通
2010-07-22 21:16:4176 摘要:介紹由美國(guó)TI公司的數(shù)字信號(hào)處理器TMS320LF2407A和SGS公司的步進(jìn)電機(jī)驅(qū)動(dòng)芯片PBL3717A構(gòu)成的兩相混合式步進(jìn)電機(jī)的控制系統(tǒng)。引言
2006-03-24 12:46:29 942
942 
步進(jìn)電機(jī)定位控制系統(tǒng)VHDL程序與仿真library IEEE;use IEEE.std_logic_1164.all;use IEEE.std_logic_arith.all;use IEEE.std_logic_unsigned.all;
entity step_mot
2008-06-27 10:44:321542 三相混合式多細(xì)分步進(jìn)電機(jī)驅(qū)動(dòng)器
本文根據(jù)正弦電流細(xì)分驅(qū)動(dòng)的原理,設(shè)計(jì)出三相混合式多細(xì)分步進(jìn)電機(jī)驅(qū)動(dòng)器。系統(tǒng)采用電流跟跟蹤和脈寬調(diào)制技術(shù),使用電機(jī)的相
2010-02-22 10:58:092135 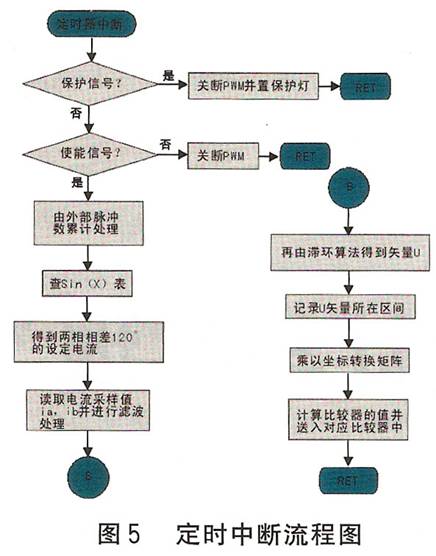
基于XC866的步進(jìn)電機(jī)閥門控制系統(tǒng)
2011-03-30 17:49:221949 
在分析了步進(jìn)電機(jī)的驅(qū)動(dòng)特性和斬波恒流細(xì)分驅(qū)動(dòng)原理和混合式步進(jìn)電機(jī)驅(qū)動(dòng)芯片L297/298的性能、結(jié)構(gòu)的基礎(chǔ)上,結(jié)合8751單片機(jī),設(shè)計(jì)出了混合式步進(jìn)電機(jī)驅(qū)動(dòng)器.實(shí)測(cè)表明,此細(xì)分
2011-09-27 16:25:0674 三相混合式步進(jìn)電機(jī)比二相步進(jìn)電機(jī)有更好的低速平穩(wěn)性及輸出力矩,所以三相混合式步進(jìn)電機(jī)比二相步進(jìn)電機(jī)有更好應(yīng)用前景。
2012-02-29 10:50:402835 
步進(jìn)電機(jī)是一種感應(yīng)電機(jī),廣泛應(yīng)用在各種自動(dòng)化控制系統(tǒng)中。電子發(fā)燒友網(wǎng)整理了步進(jìn)電機(jī)控制系統(tǒng)的一些控制原理及步進(jìn)電機(jī)驅(qū)動(dòng)電路圖、步進(jìn)電機(jī)控制驅(qū)動(dòng)程序等知識(shí),較為翔實(shí)的介紹了步進(jìn)電機(jī)控制系統(tǒng)。
2012-06-18 16:52:56

步進(jìn)電機(jī)控制系統(tǒng) 步進(jìn)電機(jī)控制系統(tǒng) 步進(jìn)電機(jī)控制系統(tǒng)
2015-11-02 18:07:0154 基于DSP的三相混合式步進(jìn)電機(jī)的SVPWM控制。
2016-04-18 09:47:4914 多細(xì)分二相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器的研制,下來看看
2016-04-25 10:40:3618 二相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器的優(yōu)化設(shè)計(jì),下來看看
2016-04-25 10:40:3622 基于DSP的兩相混合式步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)設(shè)計(jì)
2016-04-25 10:54:0917 基于TMS320LF2407的步進(jìn)電機(jī)控制系統(tǒng)
2016-04-25 17:07:534 步進(jìn)電機(jī)調(diào)速控制系統(tǒng)資料,有興趣的同學(xué)可以下載學(xué)習(xí)
2016-04-28 15:45:3125 基于單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng),有需要的下來看看
2016-05-03 13:52:5946 步進(jìn)電機(jī)調(diào)速控制系統(tǒng)資料,很好設(shè)計(jì)資料,快來學(xué)習(xí)吧。
2016-05-09 17:10:0130 基于單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)。
2016-05-25 14:03:3938 步進(jìn)電機(jī)課程設(shè)計(jì)------步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)報(bào)告
2016-06-17 14:59:5311 本文以虛擬儀器技術(shù)為理論基礎(chǔ),應(yīng)用labVIEW 軟件替代硬件電路的方式,實(shí)現(xiàn)了步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)。本文詳細(xì)介紹了利用485 串口進(jìn)行通信,采用labview 編程來實(shí)現(xiàn)控制步進(jìn)電機(jī)的正、反轉(zhuǎn)
2016-10-11 17:41:5920 多關(guān)節(jié)靈巧手混合遙操作控制系統(tǒng)_宋小瑛
2017-01-18 20:24:570 基于單片機(jī)的步進(jìn)電機(jī)開環(huán)控制系統(tǒng)基于單片機(jī)的步進(jìn)電機(jī)開環(huán)控制系統(tǒng)
2021-11-30 11:55:5827 基于DSP的步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)
2017-10-19 15:42:5623 隨著現(xiàn)代衛(wèi)星載荷探測(cè)功能日益增強(qiáng),對(duì)電機(jī)等活動(dòng)部件的壽命與可靠性提出更高要求。步進(jìn)電機(jī)自身具有體積小、質(zhì)量輕、易于控制、誤差不積累、可靠性高等優(yōu)點(diǎn),適合充當(dāng)星上載荷活動(dòng)部件。本文中使用一款兩相混合
2017-11-07 09:21:460 一、型號(hào)說明 混合式步進(jìn)電機(jī)采用稀土永磁 材料制造 與反應(yīng)式步進(jìn)電機(jī)相比具有電磁損耗小 轉(zhuǎn)換效率高 動(dòng)態(tài)特性好等優(yōu)點(diǎn) 混合步進(jìn)電機(jī)的電磁靜力矩為電機(jī)阻尼 ,取消了反應(yīng)式電機(jī)的機(jī)械阻尼盤 無需人工調(diào)整 運(yùn)行平穩(wěn) 噪音小不易失步 混合式步進(jìn)電機(jī)取代反應(yīng)式電機(jī)是經(jīng)濟(jì)型數(shù)控系統(tǒng)的發(fā)展趨勢(shì)。
2017-11-13 12:46:4116 摘 要 本文的主要工作是基于STM32步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)。隨著越來越多的高科技產(chǎn)品逐漸融入了日常生活中,步進(jìn)電機(jī)控制系統(tǒng)發(fā)生了巨大的變化。單片機(jī)、C語言等前沿學(xué)科的技術(shù)的日趨成熟與實(shí)用化,使得
2017-11-27 18:49:3690 混合式(即HB型)步進(jìn)電機(jī)有兩相、三相、五相式,轉(zhuǎn)子因與相數(shù)無關(guān),而采用相同轉(zhuǎn)子,本文以兩相HB型混合式步進(jìn)電機(jī)為例加以說明。HB型的名稱由其轉(zhuǎn)子結(jié)構(gòu)得來,其轉(zhuǎn)子是PM型永磁步進(jìn)電機(jī)與VR型變磁阻
2018-04-25 10:04:0519117 混合式步進(jìn)是指混合了永磁式和反應(yīng)式的優(yōu)點(diǎn),分為兩相和五相,兩相步進(jìn)角一般為1.8度而五相步進(jìn)角一般為 0.72度,這種步進(jìn)電機(jī)的應(yīng)用最為廣泛。本文主要解析HB型混合式步進(jìn)電機(jī)與相數(shù)、轉(zhuǎn)子齒數(shù)、主極數(shù)的關(guān)系,首先介紹的是步進(jìn)電機(jī)相數(shù)、轉(zhuǎn)子齒數(shù)和主極數(shù)的表達(dá)式,其次介紹了相內(nèi)及相間磁路的一般形式。
2018-04-25 10:23:1615163 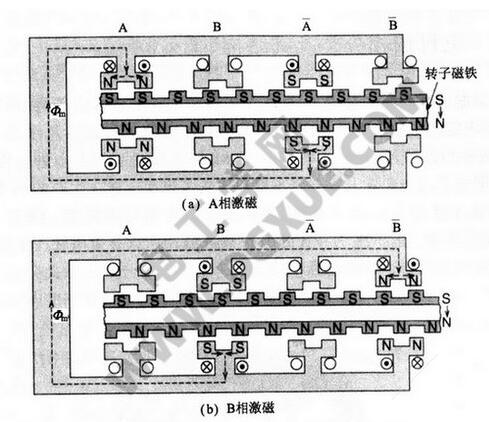
轉(zhuǎn)動(dòng)一個(gè)固定的角度(即步進(jìn)角)。可以通過控制脈沖個(gè)數(shù)來控制角位移量,從而達(dá)到準(zhǔn)確定位的目的。那么什么是混合式步進(jìn)電機(jī),混合式步進(jìn)電機(jī)和反應(yīng)式步進(jìn)電機(jī)有什么區(qū)別嗎?接下來跟隨小編詳細(xì)的來了解一下混合式步進(jìn)電機(jī)。
2018-04-25 10:59:1115748 1 系統(tǒng)設(shè)計(jì)原理 步進(jìn)電機(jī)控制系統(tǒng)主要由單片機(jī)、鍵盤LED、驅(qū)動(dòng)/放大和PC上位機(jī)等4個(gè)模塊組成,其中PC機(jī)模塊是軟件控制部分。為保護(hù)單片機(jī)控制系統(tǒng)硬件電路,在單片機(jī)和步進(jìn)電機(jī)之間增加過流保護(hù)電路
2018-10-18 16:26:018287 
步進(jìn)電機(jī)從其結(jié)構(gòu)形式上可分為反應(yīng)式步進(jìn)電機(jī)、永磁式步進(jìn)電機(jī)、混合式步進(jìn)電機(jī)、單相步進(jìn)電機(jī)、平面步進(jìn)電機(jī)等多種類型。
2020-12-26 08:30:353527 H橋功率驅(qū)動(dòng)電路可應(yīng)用于步進(jìn)電機(jī)、交流電機(jī)及直流電機(jī)等的驅(qū)動(dòng)。永磁步進(jìn)電機(jī)或混合式步進(jìn)電機(jī)的勵(lì)磁繞組都必須用雙極性電源供電,也就是說繞組有時(shí)需正向電流,有時(shí)需反向電流,這樣繞組電源需用H橋驅(qū)動(dòng)。本文以兩相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器為例來設(shè)計(jì)H橋驅(qū)動(dòng)電路。
2021-01-31 06:21:3529 基于PLC步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)說明。
2021-05-19 10:01:07104 本文步進(jìn)電機(jī)原理及DSP控制方法,進(jìn)行了步進(jìn)電機(jī)速度控制系統(tǒng)的硬件和軟件設(shè)計(jì)。該系統(tǒng)是以DSP作為四線雙極性步進(jìn)電機(jī)的控制核心。此外,還設(shè)計(jì)了顯示模塊、功能按鍵等外圍模塊。本系統(tǒng)實(shí)現(xiàn)了對(duì)步進(jìn)電機(jī)
2021-06-07 09:11:3727 此前已經(jīng)以PM型步進(jìn)電機(jī)為例介紹了步進(jìn)電機(jī)的工作。本文將介紹當(dāng)今應(yīng)用廣泛的混合式步進(jìn)電機(jī)的結(jié)構(gòu)和工作原理。
2021-06-12 10:48:006608 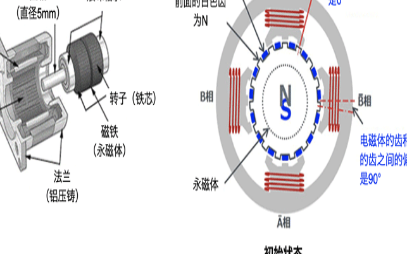
一種基于FPGA-的步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì).pdf
2022-06-23 14:52:068 此前已經(jīng)以PM型步進(jìn)電機(jī)為例介紹了步進(jìn)電機(jī)的工作。本文將介紹當(dāng)今應(yīng)用廣泛的混合式步進(jìn)電機(jī)的結(jié)構(gòu)和工作原理。混合式步進(jìn)電機(jī)的結(jié)構(gòu),混合式步進(jìn)電機(jī)是兼具VR型和PM型電機(jī)優(yōu)點(diǎn)的步進(jìn)電機(jī)。
2023-02-24 09:51:101220 
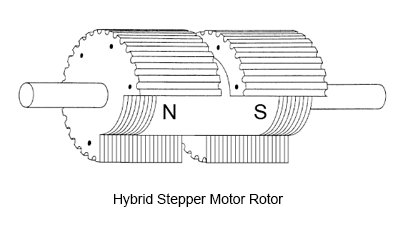
混合式步進(jìn)電機(jī)(Hybrid Stepper Motor)是目前應(yīng)用較廣泛的一種步進(jìn)電機(jī),其工作原理是將永磁式和可變磁阻式兩種原理結(jié)合在一起。
混合式步進(jìn)電機(jī)的轉(zhuǎn)子由多個(gè)磁極組成,通常
2023-03-08 16:10:341801 目錄在位置跟蹤伺服系統(tǒng)中二相混合式步進(jìn)電機(jī)閉環(huán)矢量控制simulink仿真 閉環(huán)矢量控制系統(tǒng)simulink圖? 閉環(huán)矢量控制系統(tǒng)系統(tǒng)結(jié)構(gòu)框圖 二相混合式步進(jìn)電機(jī)的數(shù)學(xué)模型 矩角特性 電壓方程
2023-03-24 10:30:591 反應(yīng)式步進(jìn)電機(jī)與混合式步進(jìn)電機(jī)的區(qū)別如下:
1、在結(jié)構(gòu)和材料上不同,混合式電機(jī)內(nèi)部具有永久磁性材料,故混合式電機(jī)有自阻(即在電機(jī)未加電的情況下有一定的自鎖力),而反應(yīng)式電機(jī)沒有自阻。
2、在運(yùn)行性能上有差別,混合式電機(jī)運(yùn)行時(shí)相對(duì)較平穩(wěn),輸出力矩相對(duì)較大,運(yùn)行聲音小。
2023-03-27 15:42:33745 未來步進(jìn)電機(jī)控制系統(tǒng)的發(fā)展將圍繞著高精度控制、高效能耗、高集成度、高可靠性和安全性以及自適應(yīng)和學(xué)習(xí)能力展開。這些發(fā)展趨勢(shì)將推動(dòng)步進(jìn)電機(jī)控制系統(tǒng)在各個(gè)領(lǐng)域的應(yīng)用更加廣泛和深入。同時(shí),步進(jìn)電機(jī)控制系統(tǒng)
2023-11-16 08:07:11464 
首先需要確定步進(jìn)電機(jī)控制系統(tǒng)的控制要求,包括控制精度、速度、轉(zhuǎn)向等方面。例如,在機(jī)械加工中,需要根據(jù)加工要求來確定步進(jìn)電機(jī)的步進(jìn)角度和轉(zhuǎn)速等參數(shù)。
2023-11-18 17:13:11857 該項(xiàng)目利用51單片機(jī)實(shí)現(xiàn)了一個(gè)步進(jìn)電機(jī)控制系統(tǒng),可以實(shí)現(xiàn)步進(jìn)電機(jī)的正反轉(zhuǎn)、加減速、啟動(dòng)和停止,并通過LCD顯示電機(jī)的工作狀態(tài)。通過該系統(tǒng),你可以控制步進(jìn)電機(jī)啟動(dòng)、旋轉(zhuǎn)的方向和速度。
2023-12-06 16:39:22969 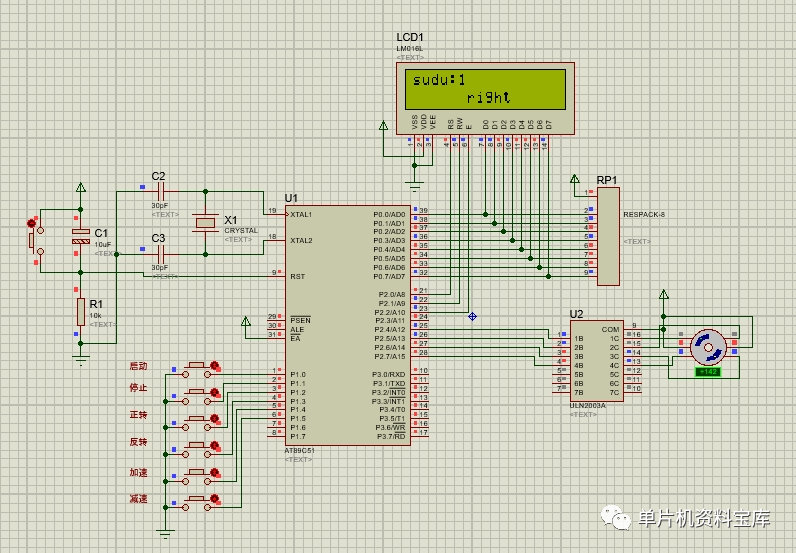
:本文應(yīng)用單片機(jī)、步進(jìn)電機(jī)驅(qū)動(dòng)芯片、字符型 LCD 和鍵盤陣列 構(gòu)建了集步進(jìn)電機(jī)控制器和驅(qū)動(dòng)器為一體的步進(jìn)電機(jī)控制系統(tǒng)。二維工作臺(tái)作為被控對(duì)象通過步進(jìn)電機(jī)驅(qū)動(dòng)滾珠絲桿在 X/Y 軸方向聯(lián)動(dòng)。文中討論
2023-12-18 09:24:241 混合式步進(jìn)電機(jī)(Hybrid Stepper Motor)結(jié)合了永磁式和變極式步進(jìn)電機(jī)的特點(diǎn),以實(shí)現(xiàn)高性能和高可靠性。 合式步進(jìn)電機(jī)融合了可變磁阻(VR)型步進(jìn)電機(jī)和永磁(PM)型步進(jìn)電機(jī)的優(yōu)勢(shì)
2024-02-06 10:01:46236 
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論